Das könnte Ihnen auch gefallen
- Simple Mail Transfer ProtocolDokument2 SeitenSimple Mail Transfer ProtocolPinakiRanjanSarkarNoch keine Bewertungen
- File Transfer ProtocolDokument2 SeitenFile Transfer ProtocolPinakiRanjanSarkarNoch keine Bewertungen
- Deep Learning Tutorial Release 0.1Dokument173 SeitenDeep Learning Tutorial Release 0.1lerhlerhNoch keine Bewertungen
- Digital Signal ProcessingDokument10 SeitenDigital Signal ProcessingPinakiRanjanSarkarNoch keine Bewertungen
- 1 - 1 OverviewHistoryRDokument16 Seiten1 - 1 OverviewHistoryRintj2001712Noch keine Bewertungen
- Assignment 6Dokument1 SeiteAssignment 6PinakiRanjanSarkarNoch keine Bewertungen
- TCPDokument4 SeitenTCPPinakiRanjanSarkar100% (1)
- TCPDokument4 SeitenTCPPinakiRanjanSarkar100% (1)
- Computer NetworkingDokument4 SeitenComputer NetworkingPinakiRanjanSarkarNoch keine Bewertungen
- FUZZYDokument25 SeitenFUZZYPinakiRanjanSarkarNoch keine Bewertungen
- AV331: DSP Lab-2: Impulse (Zeros (1,10) 1 Zeros (1,9) ) N - 10:9 Stem (N, Impulse) XlabelDokument19 SeitenAV331: DSP Lab-2: Impulse (Zeros (1,10) 1 Zeros (1,9) ) N - 10:9 Stem (N, Impulse) XlabelPinakiRanjanSarkarNoch keine Bewertungen
- Matched FilterDokument10 SeitenMatched FilterPinakiRanjanSarkarNoch keine Bewertungen
- Study of Logic Gates: AnswersDokument5 SeitenStudy of Logic Gates: AnswersPinakiRanjanSarkarNoch keine Bewertungen
- VHDL Design Units - 2Dokument3 SeitenVHDL Design Units - 2PinakiRanjanSarkarNoch keine Bewertungen
- GLCMDokument7 SeitenGLCMPinakiRanjanSarkarNoch keine Bewertungen
- Atmel 2486 8 Bit Avr Microcontroller Atmega8 L DatasheetDokument331 SeitenAtmel 2486 8 Bit Avr Microcontroller Atmega8 L DatasheetRolando IrrazabalNoch keine Bewertungen
- Vlsi Labsheet-1 Study of Basic Simulation FlowDokument9 SeitenVlsi Labsheet-1 Study of Basic Simulation FlowPinakiRanjanSarkarNoch keine Bewertungen
- E PiracyDokument36 SeitenE PiracyPinakiRanjanSarkarNoch keine Bewertungen
- Robotics and Embedded CDokument9 SeitenRobotics and Embedded CPinakiRanjanSarkarNoch keine Bewertungen
- Mul Div FactDokument7 SeitenMul Div FactPinakiRanjanSarkarNoch keine Bewertungen
- Lab 1 Introduction To Verilog: Pinaki Ranjan Sarkar (SC13B110)Dokument7 SeitenLab 1 Introduction To Verilog: Pinaki Ranjan Sarkar (SC13B110)PinakiRanjanSarkarNoch keine Bewertungen
- V-I Characteristic of Gunn Diode: Axis TitleDokument1 SeiteV-I Characteristic of Gunn Diode: Axis TitlePinakiRanjanSarkarNoch keine Bewertungen
- Introduction to 8085 Microprocessor Lab Program for Addition, Subtraction and Code CopyingDokument9 SeitenIntroduction to 8085 Microprocessor Lab Program for Addition, Subtraction and Code CopyingPinakiRanjanSarkarNoch keine Bewertungen
- Introduction To RoboticsDokument23 SeitenIntroduction To RoboticsPinakiRanjanSarkarNoch keine Bewertungen
- Matlab IntroductionDokument9 SeitenMatlab IntroductionPinakiRanjanSarkarNoch keine Bewertungen
- Sex, Sexuality & Gender-NotesDokument6 SeitenSex, Sexuality & Gender-NotesPinakiRanjanSarkarNoch keine Bewertungen
- Dram Sec07Dokument29 SeitenDram Sec07shastryNoch keine Bewertungen
- SenseDokument30 SeitenSensePinakiRanjanSarkarNoch keine Bewertungen
- DebateDokument1 SeiteDebatePinakiRanjanSarkarNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 6P14P, 6P14P-V, 6P14P-EV (6n14n, 6n14n-B, 6n14n-EB) GeneralDokument2 Seiten6P14P, 6P14P-V, 6P14P-EV (6n14n, 6n14n-B, 6n14n-EB) GeneralmauriciobtbNoch keine Bewertungen
- Diode XPDokument4 SeitenDiode XPKaasamHarishKumarNoch keine Bewertungen
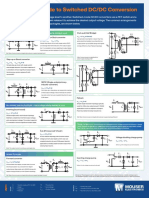
- Reference Guide To Switched DC/DC ConversionDokument1 SeiteReference Guide To Switched DC/DC ConversionLQ530Noch keine Bewertungen
- Everything About Solar PowerDokument9 SeitenEverything About Solar Powergxiiik100% (3)
- Question Bank BEEDokument5 SeitenQuestion Bank BEEK.Sushita VISTASNoch keine Bewertungen
- DGCA MODULE -05 DIGITAL TECHNICS Q&ADokument4 SeitenDGCA MODULE -05 DIGITAL TECHNICS Q&ASunil MohantaNoch keine Bewertungen
- Cable Reel Leroy Somer - enDokument16 SeitenCable Reel Leroy Somer - enEmerson BatistaNoch keine Bewertungen
- BEI605 Embedded SystemDokument79 SeitenBEI605 Embedded SystemKani Mozhi100% (2)
- Manual Planta Power Horse Casa792220Dokument74 SeitenManual Planta Power Horse Casa792220checovenezuelaNoch keine Bewertungen
- Pulse Secure Appliance Series: Purpose-built for Next Generation Secure AccessDokument3 SeitenPulse Secure Appliance Series: Purpose-built for Next Generation Secure AccessT AnnapooraniNoch keine Bewertungen
- Power System Control (EE-4)Dokument22 SeitenPower System Control (EE-4)Abhishek RoshanNoch keine Bewertungen
- Ina 219Dokument20 SeitenIna 219Garcia F. Marcio100% (1)
- Basic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishDokument10 SeitenBasic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishReetipragya SinghNoch keine Bewertungen
- Cxs - 175s Codex AlimentDokument348 SeitenCxs - 175s Codex AlimentdeuxerNoch keine Bewertungen
- Lap Top Repair Book Chapter 2 Chapter11 Analysis of Wistron OEM Laptop CircuitDokument58 SeitenLap Top Repair Book Chapter 2 Chapter11 Analysis of Wistron OEM Laptop CircuitIsaac PerezNoch keine Bewertungen
- Industrial Sliding Gate GearmotorsDokument11 SeitenIndustrial Sliding Gate GearmotorsVictor Catril MatamalaNoch keine Bewertungen
- Service Advice Ltu 155eDokument3 SeitenService Advice Ltu 155edNoch keine Bewertungen
- Report On "Lifi Technology": Table of ContentDokument8 SeitenReport On "Lifi Technology": Table of Contentshaikh nargisNoch keine Bewertungen
- ReadMe Da VinciDokument2 SeitenReadMe Da VinciWilliam GravesNoch keine Bewertungen
- DC-DC Converters - Lecture Notes Tutorial Problems PDFDokument23 SeitenDC-DC Converters - Lecture Notes Tutorial Problems PDFvipul50% (6)
- H1000Dokument2 SeitenH1000Nelson Cacahuate PowerDanceeNoch keine Bewertungen
- Apple Technician Guide For LED Cinema Display (24-Inch)Dokument92 SeitenApple Technician Guide For LED Cinema Display (24-Inch)addai262Noch keine Bewertungen
- W5100 PDFDokument69 SeitenW5100 PDFJorBS57Noch keine Bewertungen
- Xyce Reference GuideDokument634 SeitenXyce Reference GuideVojislav MedićNoch keine Bewertungen
- How To Manufacture A Free Energy Device (Perpetual Motion)Dokument12 SeitenHow To Manufacture A Free Energy Device (Perpetual Motion)leechster100% (1)
- 14 Password Based Door Lock System Using 8051 Microcontroller - CompressDokument32 Seiten14 Password Based Door Lock System Using 8051 Microcontroller - CompressGouthamiNoch keine Bewertungen
- Signals and Systems (2nd Edition) - Oppenheim Matlab ProjectDokument2 SeitenSignals and Systems (2nd Edition) - Oppenheim Matlab ProjectdavStonerNoch keine Bewertungen
- Amplitude ModulationDokument23 SeitenAmplitude ModulationelvinguitarNoch keine Bewertungen
- S7 Graph SFC SiemensDokument228 SeitenS7 Graph SFC SiemensBlueNoch keine Bewertungen