Das könnte Ihnen auch gefallen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Lab 6 LCS 078Dokument13 SeitenLab 6 LCS 078Asad saeedNoch keine Bewertungen
- Week 7A - Online Classes - S2020Dokument16 SeitenWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNoch keine Bewertungen
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDokument12 SeitenDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeNoch keine Bewertungen
- Module Information Module Title Electric Drives and Control Module Code MMD2511Dokument4 SeitenModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNoch keine Bewertungen
- Control Systems Lect. 4 PIDDokument65 SeitenControl Systems Lect. 4 PIDhmaymadNoch keine Bewertungen
- Utilization of Electric PowerDokument1 SeiteUtilization of Electric PowerAbhimita GaineNoch keine Bewertungen
- Basic Tutorials MC in DC Motor ControlDokument5 SeitenBasic Tutorials MC in DC Motor ControlAbdullah ÇakanNoch keine Bewertungen
- MatLab AssignmentDokument9 SeitenMatLab AssignmentTher Htet AungNoch keine Bewertungen
- DC Machine SimulationDokument12 SeitenDC Machine Simulationkiranch219Noch keine Bewertungen
- Unit Step Function in MatlabDokument6 SeitenUnit Step Function in Matlabshaista005100% (3)
- Matlab-Simulink Controller DesignDokument4 SeitenMatlab-Simulink Controller DesignMohamed SomaiNoch keine Bewertungen
- Transfer Function of The DC Motor (Yaser Rahmati)Dokument4 SeitenTransfer Function of The DC Motor (Yaser Rahmati)Farag AlargtNoch keine Bewertungen
- Control System Engineering: Lab Report 01Dokument11 SeitenControl System Engineering: Lab Report 01Zain UL ABIDINNoch keine Bewertungen
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDokument6 SeitenCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNoch keine Bewertungen
- 01 - Introduction To Multilevel InvertersDokument53 Seiten01 - Introduction To Multilevel Invertersp09el860Noch keine Bewertungen
- Transducer: Controller (Control Theory)Dokument5 SeitenTransducer: Controller (Control Theory)Farrukh JamilNoch keine Bewertungen
- Cs Pole Placement DesignDokument15 SeitenCs Pole Placement Design18U208 - ARJUN A100% (1)
- Ziegler Nichols Matlab PDFDokument8 SeitenZiegler Nichols Matlab PDFMarco Arcos100% (2)
- EEE3001 Software ManualDokument34 SeitenEEE3001 Software ManualManuDubeyNoch keine Bewertungen
- Project 12Dokument44 SeitenProject 12harsha9ramireddyNoch keine Bewertungen
- Questions & Answers On S-Domain AnalysisDokument33 SeitenQuestions & Answers On S-Domain Analysiskibrom atsbhaNoch keine Bewertungen
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDokument7 SeitenTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDokument17 SeitenSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNoch keine Bewertungen
- Efficiency Calculation - TransformerDokument9 SeitenEfficiency Calculation - TransformerShraddha RautNoch keine Bewertungen
- Distributed Generation: Benefits, Issues and ChallengesDokument7 SeitenDistributed Generation: Benefits, Issues and ChallengesGRENZE Scientific SocietyNoch keine Bewertungen
- Lecture 5 - Load Flow SolutionsDokument5 SeitenLecture 5 - Load Flow Solutions12onn1eNoch keine Bewertungen
- Lab Pid Motor ControlDokument17 SeitenLab Pid Motor ControlacajahuaringaNoch keine Bewertungen
- Ei 7211-Circuit Simulation Lab List of ExperimentsDokument61 SeitenEi 7211-Circuit Simulation Lab List of ExperimentsKʀɩsʜŋʌ KʌŋʌŋNoch keine Bewertungen
- Simulink HDL CoderDokument7 SeitenSimulink HDL CoderAmr YassinNoch keine Bewertungen
- Components For Embedded ProgramsDokument16 SeitenComponents For Embedded ProgramsRajesh cNoch keine Bewertungen
- Fuzzy LogicDokument48 SeitenFuzzy LogicMani Bharath NutiNoch keine Bewertungen
- PID Control System Analysis & DesignDokument10 SeitenPID Control System Analysis & DesignFeridinand Thainis100% (1)
- 1.single Phase AC To DC Fully Controlled Converter PDFDokument10 Seiten1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanNoch keine Bewertungen
- Speeed ControlDokument3 SeitenSpeeed ControlChristine GomezNoch keine Bewertungen
- Focussed Question Bank With AnswersDokument18 SeitenFocussed Question Bank With AnswersHari Krishnan100% (1)
- Unsymmetrical Fault AnalysisDokument49 SeitenUnsymmetrical Fault AnalysisabdulbabulNoch keine Bewertungen
- SEPIC ConverterDokument16 SeitenSEPIC ConverterDina GaranNoch keine Bewertungen
- Phase Balancing Using Hereford Ranch AlgorithmDokument4 SeitenPhase Balancing Using Hereford Ranch AlgorithmtissatomNoch keine Bewertungen
- DLD - Ch.1 Notes PDFDokument35 SeitenDLD - Ch.1 Notes PDFAlradi Malak FadiNoch keine Bewertungen
- Design of Traffic Light Controller Using Timer CircuitDokument3 SeitenDesign of Traffic Light Controller Using Timer CircuitVinooja cNoch keine Bewertungen
- Economic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleDokument26 SeitenEconomic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleAdisuNoch keine Bewertungen
- Static RelaysDokument11 SeitenStatic RelaysBharathwaj SreedharNoch keine Bewertungen
- EEE 805 Assignment Questions For Chapter 20Dokument11 SeitenEEE 805 Assignment Questions For Chapter 20ayeniNoch keine Bewertungen
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- Introduction: PID Controller Design: Sistemas de ControlDokument15 SeitenIntroduction: PID Controller Design: Sistemas de ControlPatricio EncaladaNoch keine Bewertungen
- Chapter1-Basic Concepts of Measurements-09Dokument21 SeitenChapter1-Basic Concepts of Measurements-09azrurezuan100% (1)
- Engineering Unit 1 Jan 2022Dokument20 SeitenEngineering Unit 1 Jan 2022Subscriptions ram100% (1)
- VHDL Synchronous CountersDokument28 SeitenVHDL Synchronous CountersShanaka JayasekaraNoch keine Bewertungen
- Measurement of VelocityDokument59 SeitenMeasurement of VelocityYogeshBhatt100% (1)
- DMA Controller - 8237Dokument9 SeitenDMA Controller - 8237Umesh Harihara sudanNoch keine Bewertungen
- HazardsDokument20 SeitenHazardsgpuonlineNoch keine Bewertungen
- Principles of The LVDTDokument3 SeitenPrinciples of The LVDTWalid FattahNoch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Power Electronics Converters and their Control for Renewable Energy ApplicationsVon EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNoch keine Bewertungen
- Speed Control of DC Motor Using Pid Controller Based On MatlabDokument8 SeitenSpeed Control of DC Motor Using Pid Controller Based On MatlabAlexander DeckerNoch keine Bewertungen
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignDokument15 SeitenControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignSengottu VelusamyNoch keine Bewertungen
- Ibm Qradar DGDokument7 SeitenIbm Qradar DGMuhammad TalhaNoch keine Bewertungen
- Romney Ais14 CH 16 General Ledger and Reporting SystemDokument11 SeitenRomney Ais14 CH 16 General Ledger and Reporting SystemHabteweld EdluNoch keine Bewertungen
- R SubnettingDokument16 SeitenR SubnettingManuj SathaNoch keine Bewertungen
- Asoc Drive by DownloadDokument11 SeitenAsoc Drive by DownloadHuyNoch keine Bewertungen
- WWW - Ykkap Agen - Com NEXSTA CatalogDokument33 SeitenWWW - Ykkap Agen - Com NEXSTA CatalogXaverius NandaNoch keine Bewertungen
- Grade 9 Math Unit 2 Review AssignmentDokument6 SeitenGrade 9 Math Unit 2 Review AssignmentQurat-Ul-Ain JaferiNoch keine Bewertungen
- Bohlin Visco 88Dokument2 SeitenBohlin Visco 88amancivilNoch keine Bewertungen
- #14674 Difficulty: Moderate #35626 Difficulty: ModerateDokument4 Seiten#14674 Difficulty: Moderate #35626 Difficulty: ModerateLaszló KindNoch keine Bewertungen
- Answers by GRPDokument22 SeitenAnswers by GRPAmiraNoch keine Bewertungen
- SAS Part-1 SyllabusDokument7 SeitenSAS Part-1 Syllabusnagarjuna_upsc100% (1)
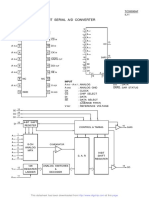
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODokument1 SeiteC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangNoch keine Bewertungen
- GitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1Dokument1 SeiteGitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1shida67Noch keine Bewertungen
- Haxm-Windows v6 0 1Dokument3 SeitenHaxm-Windows v6 0 1Esteban David Ramírez EspinozaNoch keine Bewertungen
- Homework 7 SolutionsDokument2 SeitenHomework 7 SolutionsDivyesh KumarNoch keine Bewertungen
- Absensi Kelas Xii 2020-2021Dokument28 SeitenAbsensi Kelas Xii 2020-2021Anastasya NanggoNoch keine Bewertungen
- Paragraph Organization Civil Service Test ExamplesDokument5 SeitenParagraph Organization Civil Service Test Exampleslordaiztrand100% (3)
- Research EditedDokument7 SeitenResearch Editedauko omondiNoch keine Bewertungen
- Interactive EnvironmentsDokument5 SeitenInteractive EnvironmentsCosmin009Noch keine Bewertungen
- FitTrack BloodLinkDokument7 SeitenFitTrack BloodLinkInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Ricoh Aficio MP 2553 Copier Copier BrochureDokument4 SeitenRicoh Aficio MP 2553 Copier Copier BrochureDaniel OlivaresNoch keine Bewertungen
- Tech Mahindra Aptitude PaperDokument22 SeitenTech Mahindra Aptitude PaperAkash BhagatNoch keine Bewertungen
- 1 - Introduction To PythonDokument106 Seiten1 - Introduction To Pythonpdastagiri007Noch keine Bewertungen
- CustomPC 2023-2 PDFDokument100 SeitenCustomPC 2023-2 PDFTavimmmmmNoch keine Bewertungen
- Cyberpunk 2020 - Datafortress 2020 - AppleseedDokument30 SeitenCyberpunk 2020 - Datafortress 2020 - AppleseedGeraint BrownNoch keine Bewertungen
- Module 1 Keyword ResearchDokument29 SeitenModule 1 Keyword Researchalfian gunadiNoch keine Bewertungen
- Configuring SNMP On ProteusDokument12 SeitenConfiguring SNMP On ProteusAijaz MirzaNoch keine Bewertungen
- Salesforce Certified AdministratorDokument7 SeitenSalesforce Certified AdministratorMurali Manohar Akula0% (1)
- Assignment 2dbmsDokument13 SeitenAssignment 2dbmsTXACORPNoch keine Bewertungen
- Jbase Locking MecanismeDokument33 SeitenJbase Locking MecanismeMamat AdoumaNoch keine Bewertungen