Das könnte Ihnen auch gefallen
- Esquema MacroeconomíaDokument2 SeitenEsquema MacroeconomíaMayte Yusedith OliverosNoch keine Bewertungen
- Apuntes Econom A Muy Buenos Basados en MochonDokument156 SeitenApuntes Econom A Muy Buenos Basados en MochonshnnypperhNoch keine Bewertungen
- Actividad 5Dokument2 SeitenActividad 5Jav Madera100% (1)
- Analitica de Datos para Pymes PDFDokument30 SeitenAnalitica de Datos para Pymes PDFLewis Puello100% (2)
- Modelos Econométricos de Series de Tiempo en EViews - 2979Dokument3 SeitenModelos Econométricos de Series de Tiempo en EViews - 2979daniels1329Noch keine Bewertungen
- Metodo Montecarlo. .Dokument28 SeitenMetodo Montecarlo. .Edwin VasquezNoch keine Bewertungen
- Analisis de Series de Tiempo U ChileDokument52 SeitenAnalisis de Series de Tiempo U ChilePedro Mauricio Fajardo AyalaNoch keine Bewertungen
- Capítulo 4-Parte 1 de 6-Curso SD-Proyección de RRC-Proyección Del BalanceDokument16 SeitenCapítulo 4-Parte 1 de 6-Curso SD-Proyección de RRC-Proyección Del BalancePablo Velázquez MéndezNoch keine Bewertungen
- Programa de Finanzas CorporativasDokument2 SeitenPrograma de Finanzas Corporativaswasac34567100% (1)
- Historia de La EconometríaDokument61 SeitenHistoria de La EconometríadopienagNoch keine Bewertungen
- Simulación de MonteCarloDokument3 SeitenSimulación de MonteCarlochodyNoch keine Bewertungen
- Pronosticos Box JenkinsDokument133 SeitenPronosticos Box JenkinsFelipe Hernández Martínez100% (1)
- Econometria Con Stata Introduccion y Analisis de DDokument47 SeitenEconometria Con Stata Introduccion y Analisis de DvaleskaosaNoch keine Bewertungen
- Conceptos Básicos de La Econometría FinancieraDokument50 SeitenConceptos Básicos de La Econometría FinancieraPaola Andrea Velasquez O100% (3)
- VAR Simulación de MontecarloDokument14 SeitenVAR Simulación de MontecarloJuan Chura100% (1)
- Tarea Supervivencia 1Dokument5 SeitenTarea Supervivencia 1TonyNoch keine Bewertungen
- Regresión CompletaDokument38 SeitenRegresión CompletaDiiäNä BêZzêrräNoch keine Bewertungen
- Análisis MultivariadoDokument18 SeitenAnálisis MultivariadoMauricio HinojosaNoch keine Bewertungen
- Econometria EspacialDokument33 SeitenEconometria Espacialarteuni1Noch keine Bewertungen
- Tipo de Cambio Fijo y FlexibleDokument5 SeitenTipo de Cambio Fijo y FlexibleLuisa LimaNoch keine Bewertungen
- Modelo Consumo de Gasolina-PanelDokument27 SeitenModelo Consumo de Gasolina-PanelR ZequeiraNoch keine Bewertungen
- Dominancia EstocásticaDokument2 SeitenDominancia EstocásticaCerdito PotterNoch keine Bewertungen
- Introduccion A La EconometriaDokument16 SeitenIntroduccion A La EconometriatulindanokiaNoch keine Bewertungen
- Series de TiempoDokument48 SeitenSeries de TiempoarnoldNoch keine Bewertungen
- Microeconometría en RDokument123 SeitenMicroeconometría en Rsaul M.cNoch keine Bewertungen
- 1ra ParteDokument57 Seiten1ra ParteCristhian VasquezNoch keine Bewertungen
- Técnica MonteCarloDokument9 SeitenTécnica MonteCarloRuben's Rene Ðiaz Macias100% (1)
- Guia de Certificacion 2022Dokument14 SeitenGuia de Certificacion 2022Romina GasparNoch keine Bewertungen
- Modelo ArimaDokument16 SeitenModelo ArimaYohann Videla GieringNoch keine Bewertungen
- Modelo de Cox v2 PDFDokument24 SeitenModelo de Cox v2 PDFAngel Guadarrama RamirezNoch keine Bewertungen
- Simulacion MonteCarloDokument20 SeitenSimulacion MonteCarloJulio Jamir Montes RodriguezNoch keine Bewertungen
- Gestion de Proyectos STARTUPDokument27 SeitenGestion de Proyectos STARTUPAntonio VillanuevaNoch keine Bewertungen
- Modelos Lineales GeneralizadosDokument42 SeitenModelos Lineales GeneralizadosDiana PalomaNoch keine Bewertungen
- Intro A MicroeconometríaDokument13 SeitenIntro A MicroeconometríaMari MSNoch keine Bewertungen
- VAR Stock & Watson - En.esDokument26 SeitenVAR Stock & Watson - En.esCarlos RamirezNoch keine Bewertungen
- Ley de Rendimientos DecrecientesDokument5 SeitenLey de Rendimientos DecrecientesSara PenagosNoch keine Bewertungen
- Aplicacion de Modelos GARCH para El Calculo de La Volatilidad Del IGBVLDokument18 SeitenAplicacion de Modelos GARCH para El Calculo de La Volatilidad Del IGBVLorlando contrerasNoch keine Bewertungen
- Naturaleza y Factores ProductividadDokument57 SeitenNaturaleza y Factores ProductividadJessica PerezNoch keine Bewertungen
- Articulo IBNR Hugo Esteban Barrero MoraDokument18 SeitenArticulo IBNR Hugo Esteban Barrero Moraenrique gonzalez duran100% (1)
- La Teoría Moderna de PortafoliosDokument8 SeitenLa Teoría Moderna de PortafoliosSara Estefania Vargas GomezNoch keine Bewertungen
- Apuntes de Econometria IntermediaDokument416 SeitenApuntes de Econometria Intermediaeco_alvaro100% (3)
- Modelos de RegresiónDokument59 SeitenModelos de RegresiónMajo Jiménez GedeónNoch keine Bewertungen
- Simuacion EstocásticaDokument195 SeitenSimuacion EstocásticaMiguel A. Cuicas100% (1)
- La Economia de La Informacion AsimetricaDokument10 SeitenLa Economia de La Informacion AsimetricaEnrico Huarag GuerreroNoch keine Bewertungen
- Econometria AplicadaDokument11 SeitenEconometria AplicadaRicardo Shahid Ruiz SalvatierraNoch keine Bewertungen
- Planificacion de TransporteDokument53 SeitenPlanificacion de TransporteFernando Cianca100% (2)
- Simulación de MontecarloDokument37 SeitenSimulación de MontecarloBoris YanguezNoch keine Bewertungen
- Curso de Introduccion Al Paquete Stata - 9 - 1Dokument33 SeitenCurso de Introduccion Al Paquete Stata - 9 - 1wolvdanNoch keine Bewertungen
- La Demanda de Dinero en MéxicoDokument54 SeitenLa Demanda de Dinero en MéxicoAlejandro RiveroNoch keine Bewertungen
- UntitledDokument222 SeitenUntitledHernández Fernández AngélicaNoch keine Bewertungen
- Introduccion A La Inferencia EstadisticaDokument340 SeitenIntroduccion A La Inferencia EstadisticaSara Suarez Carnota100% (1)
- Tablas de Mortal Id Ad CNSF 2000-I y CNSF 2000-gDokument19 SeitenTablas de Mortal Id Ad CNSF 2000-I y CNSF 2000-gIndieverydayNoch keine Bewertungen
- Ejemplo Montecarlo PDFDokument121 SeitenEjemplo Montecarlo PDFSecretaria de Hacienda Plaza de mercado100% (1)
- Modelo Arima (2 Files Merged)Dokument91 SeitenModelo Arima (2 Files Merged)Hernan BetinNoch keine Bewertungen
- Modelizacion ARIMADokument38 SeitenModelizacion ARIMAJosebamuroNoch keine Bewertungen
- Metodo ArimaDokument21 SeitenMetodo ArimaErik Ayala LeonNoch keine Bewertungen
- Modelo ArimaDokument29 SeitenModelo ArimaLuz D. Mamani AquinoNoch keine Bewertungen
- Trabajo Final ArimaDokument17 SeitenTrabajo Final ArimaSergio RaveloNoch keine Bewertungen
- Modelos ArimaDokument14 SeitenModelos Arimaapi-325177167100% (1)
- ArimaDokument2 SeitenArimaLilian Tejada NiquenNoch keine Bewertungen
- Itinerario Produccion AgropecuariaDokument2 SeitenItinerario Produccion AgropecuariaMarco Antonio100% (2)
- Organigrama 2018 Aprobado GrpunoDokument1 SeiteOrganigrama 2018 Aprobado Grpunohenry amielNoch keine Bewertungen
- Norma Tecnica SaludDokument66 SeitenNorma Tecnica SaludClinica Cornejo Especialidades QuirurgicasNoch keine Bewertungen
- Cme 12Dokument63 SeitenCme 12Uvaldo PqNoch keine Bewertungen
- A Nexo Snip 09Dokument29 SeitenA Nexo Snip 09Jeremy MorrisonNoch keine Bewertungen
- Itinerario Formativo de La Carrera Profesional Computación e InformáticaDokument1 SeiteItinerario Formativo de La Carrera Profesional Computación e Informáticalasalle_urubamba100% (2)
- ReposicionDokument4 SeitenReposicionhenry amielNoch keine Bewertungen
- Itinerario Produccion AgropecuariaDokument2 SeitenItinerario Produccion Agropecuariahenry amielNoch keine Bewertungen
- Calificacion 2Dokument2 SeitenCalificacion 2henry amielNoch keine Bewertungen
- Elaboracion de Productos Alimenticios PDFDokument10 SeitenElaboracion de Productos Alimenticios PDFagccNoch keine Bewertungen
- Operador de Procesos en La Industria Alimentaria LopdDokument74 SeitenOperador de Procesos en La Industria Alimentaria Lopdhenry amielNoch keine Bewertungen
- Itinerario Formativo - IndustriasDokument2 SeitenItinerario Formativo - Industriashenry amielNoch keine Bewertungen
- Itinerario Industrias AlimentariasDokument3 SeitenItinerario Industrias Alimentariashenry amielNoch keine Bewertungen
- AnexosDokument1 SeiteAnexoshenry amielNoch keine Bewertungen
- El Miedo A FlotarDokument3 SeitenEl Miedo A Flotarhenry amielNoch keine Bewertungen
- Calificacion 2Dokument2 SeitenCalificacion 2henry amielNoch keine Bewertungen
- Instructivo para El Llenado FORMATO N 06-BDokument8 SeitenInstructivo para El Llenado FORMATO N 06-BAnonymous xVTUMpK4ENoch keine Bewertungen
- Brecha EducaciónDokument7 SeitenBrecha Educaciónhenry amielNoch keine Bewertungen
- Mercado y TiposDokument6 SeitenMercado y Tiposhenry amielNoch keine Bewertungen
- Calificación de Riesgo de ProyectoDokument2 SeitenCalificación de Riesgo de Proyectohenry amielNoch keine Bewertungen
- T 1420Dokument141 SeitenT 1420henry amielNoch keine Bewertungen
- Verbos para Plantear ObjetivosDokument3 SeitenVerbos para Plantear Objetivoscamediga4094Noch keine Bewertungen
- Paper Econ Del ConocimientoDokument10 SeitenPaper Econ Del Conocimientohenry amielNoch keine Bewertungen
- Matem EconDokument8 SeitenMatem Econhenry amielNoch keine Bewertungen
- Limit EsDokument10 SeitenLimit Eshenry amielNoch keine Bewertungen
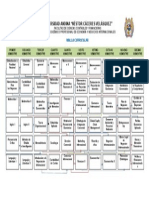
- Malla CurricularDokument1 SeiteMalla Curricularhenry amielNoch keine Bewertungen
- DeterminantesDokument9 SeitenDeterminanteshenry amielNoch keine Bewertungen
- 4-Balanza de PagosDokument8 Seiten4-Balanza de Pagoshenry amielNoch keine Bewertungen
- Plan de Exportacion - PromperuDokument133 SeitenPlan de Exportacion - PromperuDennis Eduardo Coz CamposanoNoch keine Bewertungen
- TrabajoDokument3 SeitenTrabajohenry amielNoch keine Bewertungen
- Actividad # 4Dokument9 SeitenActividad # 4Mira LejosNoch keine Bewertungen
- Crespo, Sanabria & Guerra (2012) - Matemática para Arquitectos: Convergencias Conceptuales y Experiencias Pedagógicas Integradas Con Expresión GráficaDokument9 SeitenCrespo, Sanabria & Guerra (2012) - Matemática para Arquitectos: Convergencias Conceptuales y Experiencias Pedagógicas Integradas Con Expresión GráficaIslenis Carolina Botello CuvidesNoch keine Bewertungen
- Regresión Lineal SimpleDokument11 SeitenRegresión Lineal SimpleKaty Yarel Arista CarrascoNoch keine Bewertungen
- Examen Final VectorialDokument2 SeitenExamen Final VectorialAllucard CasullNoch keine Bewertungen
- No Existe El Logaritmo de Los Números NegativosDokument10 SeitenNo Existe El Logaritmo de Los Números NegativosCarmenza Arteaga PetroNoch keine Bewertungen
- Practica Mat-160Dokument3 SeitenPractica Mat-160IVán Geronny SánchezNoch keine Bewertungen
- 5to Prima Mat I BimestreDokument137 Seiten5to Prima Mat I BimestreJosé Luis AquiseNoch keine Bewertungen
- Pci 2023Dokument817 SeitenPci 2023JOSE MARTIN SOLANO MALDONADONoch keine Bewertungen
- Trabajo Practico N 3 N Enteros Sumas y RestasDokument4 SeitenTrabajo Practico N 3 N Enteros Sumas y RestasNancy E. GómezNoch keine Bewertungen
- Clase 23 - Álgebra LinealDokument9 SeitenClase 23 - Álgebra LinealGeison M RiveyroNoch keine Bewertungen
- Practica 1Dokument7 SeitenPractica 1Deysi Mamani ChecallaNoch keine Bewertungen
- Introduccion A La Estadistica Inferencial PDFDokument6 SeitenIntroduccion A La Estadistica Inferencial PDFTatiana Valentina Ordo?Ez DuranNoch keine Bewertungen
- Practica Optimizacion 1Dokument6 SeitenPractica Optimizacion 1María Fernández ParedesNoch keine Bewertungen
- ENSEÑANZA DIVERSIFICADA (Tomlinson)Dokument76 SeitenENSEÑANZA DIVERSIFICADA (Tomlinson)zopil100% (2)
- Probabilidades: Sebastian Becerra CespedesDokument23 SeitenProbabilidades: Sebastian Becerra CespedesNgr BeatzNoch keine Bewertungen
- Numeric o 0002Dokument10 SeitenNumeric o 0002lincolnNoch keine Bewertungen
- Torque, Momento de Una FuerzaDokument7 SeitenTorque, Momento de Una FuerzaJhoe100% (2)
- Guia - Cálculo Diferencial (FINAL)Dokument33 SeitenGuia - Cálculo Diferencial (FINAL)du ydNoch keine Bewertungen
- Cuaterniones y Rotación en El EspacioDokument4 SeitenCuaterniones y Rotación en El EspacioJavier Garcia RajoyNoch keine Bewertungen
- Algebra de BooleDokument11 SeitenAlgebra de BooleBolojNoch keine Bewertungen
- Cal - Esc - Lin TDECDokument2 SeitenCal - Esc - Lin TDECMercedes SierraNoch keine Bewertungen
- Biografía Henri PoincaréDokument5 SeitenBiografía Henri PoincaréMafer TorresNoch keine Bewertungen
- Primer Momento de Lineas y AreasDokument1 SeitePrimer Momento de Lineas y AreasJose Jesus Lucio Lopez0% (2)
- Nociones Previas: SUJETOS: Son Los Protagonistas DelDokument28 SeitenNociones Previas: SUJETOS: Son Los Protagonistas Delprofe.alexNoch keine Bewertungen
- Red de CorrienteDokument19 SeitenRed de CorrienteElvisVasquezGonzalezNoch keine Bewertungen
- Canales Con Sección Compuesta y RugosidadDokument4 SeitenCanales Con Sección Compuesta y Rugosidadalexarctic codebreakerNoch keine Bewertungen
- Aproximación e Interpolación PolinómicaDokument21 SeitenAproximación e Interpolación PolinómicaAlejandraLárezNoch keine Bewertungen
- Guía de Ejercicios Números RealesDokument3 SeitenGuía de Ejercicios Números RealesMonica Vasquez SilvaNoch keine Bewertungen
- Números ComplejosDokument14 SeitenNúmeros ComplejosRubenNoch keine Bewertungen
- 2do Examen AcademiaDokument5 Seiten2do Examen AcademiaKaren Lizana BecerraNoch keine Bewertungen