Das könnte Ihnen auch gefallen
- Open System (1) ThermodynamicDokument38 SeitenOpen System (1) ThermodynamicSakinah KamalNoch keine Bewertungen
- Can Crusher MechanismDokument23 SeitenCan Crusher Mechanismsaqlain05Noch keine Bewertungen
- Unit1 5 Problems On MechanismsDokument12 SeitenUnit1 5 Problems On MechanismsKarthikayan Balaji100% (2)
- Book "Vocabulary Pictured+: SAT & GRE Words" by Sudhir ShirwadkarDokument2 SeitenBook "Vocabulary Pictured+: SAT & GRE Words" by Sudhir ShirwadkarpandirajaNoch keine Bewertungen
- Lab Manual - KTM - 3131906Dokument11 SeitenLab Manual - KTM - 3131906Jayal PatelNoch keine Bewertungen
- Mechanism WorksheetDokument8 SeitenMechanism Worksheetnatnaelzelalem03Noch keine Bewertungen
- QB MEM404 NewDokument12 SeitenQB MEM404 NewRohit DiwakarNoch keine Bewertungen
- KOM Question BankDokument13 SeitenKOM Question BankDivyeshNoch keine Bewertungen
- Cms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsDokument17 SeitenCms College of Engineering, Namakkal: Unit 1 - Basics of MechanismsRajueswarNoch keine Bewertungen
- Unit Wise 16 Mark QuestionsDokument29 SeitenUnit Wise 16 Mark QuestionsPreethi SharmiNoch keine Bewertungen
- Assignment - 1 Introduction of Machines and Mechanisms: TheoryDokument23 SeitenAssignment - 1 Introduction of Machines and Mechanisms: TheoryAman AmanNoch keine Bewertungen
- Mechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can CrusherDokument10 SeitenMechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can Crushersaqlain05Noch keine Bewertungen
- Kom 2Dokument3 SeitenKom 2vikas2504Noch keine Bewertungen
- Manipal Institute of TechnologyDokument2 SeitenManipal Institute of Technologydreamivory29Noch keine Bewertungen
- a.2ndMechTOM SERIES TEST I-15032023Dokument1 Seitea.2ndMechTOM SERIES TEST I-15032023MARIA MCETNoch keine Bewertungen
- Kinematics of Machines - AssignmentDokument21 SeitenKinematics of Machines - AssignmentAmit BharadwajNoch keine Bewertungen
- Kinematics of Machinery QPDokument2 SeitenKinematics of Machinery QPshiekziaNoch keine Bewertungen
- Relative Vel. and Accl. ProblemsDokument9 SeitenRelative Vel. and Accl. ProblemsSanket KumbharNoch keine Bewertungen
- Question Bank KOMDokument3 SeitenQuestion Bank KOMMudit MaheshwariNoch keine Bewertungen
- Velocity and AccelartionDokument56 SeitenVelocity and Accelartionadus lakshmanNoch keine Bewertungen
- ME6401-Kinematics of MachineryDokument11 SeitenME6401-Kinematics of Machineryappuanandh7811Noch keine Bewertungen
- I K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorDokument4 SeitenI K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorAbenezer bediluNoch keine Bewertungen
- 15A03402 Kinematics of MachinesDokument3 Seiten15A03402 Kinematics of Machinesrammohan reddyNoch keine Bewertungen
- Kinematics of Machinary April 2021Dokument2 SeitenKinematics of Machinary April 2021mighty statusNoch keine Bewertungen
- Kinematics of Machinery Anna University Question Papers CompiledDokument77 SeitenKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanNoch keine Bewertungen
- 2.kinematics of MachineryDokument14 Seiten2.kinematics of MachineryJegan ParamasivamNoch keine Bewertungen
- NR 220304 Kinematics of MachineryDokument11 SeitenNR 220304 Kinematics of MachinerySrinivasa Rao GNoch keine Bewertungen
- Kom Unit-IIDokument21 SeitenKom Unit-IIRamanathan DuraiNoch keine Bewertungen
- Kinematics of Machinery Question BankDokument92 SeitenKinematics of Machinery Question BankNatesha Sundharan100% (2)
- Question BankDokument7 SeitenQuestion BankmunirajNoch keine Bewertungen
- Chapter One and Chapter 2 WorksheetDokument9 SeitenChapter One and Chapter 2 WorksheetSena MekoninNoch keine Bewertungen
- WWW - Manaresults.co - In: II B. Tech II Semester Regular/Supplementary Examinations, November - 2020 Kinematics of MachinaryDokument2 SeitenWWW - Manaresults.co - In: II B. Tech II Semester Regular/Supplementary Examinations, November - 2020 Kinematics of MachinaryPavaniNoch keine Bewertungen
- TOMDokument21 SeitenTOMHarikrishna ShenoyNoch keine Bewertungen
- A.R Engineering College: Villupuram Department of Mechanical EngineeringDokument14 SeitenA.R Engineering College: Villupuram Department of Mechanical EngineeringVENKATESHNoch keine Bewertungen
- Kom QB (R20)Dokument6 SeitenKom QB (R20)rk krishnaNoch keine Bewertungen
- 10ME/AU44: at Least TWO Questions From Each PartDokument2 Seiten10ME/AU44: at Least TWO Questions From Each PartsatheeshNoch keine Bewertungen
- Kinematics of Machinary Nov 2020Dokument2 SeitenKinematics of Machinary Nov 2020mighty statusNoch keine Bewertungen
- R7220302 Kinematics of MachineryDokument2 SeitenR7220302 Kinematics of MachinerysivabharathamurthyNoch keine Bewertungen
- Midsem Question Paper 2015Dokument1 SeiteMidsem Question Paper 2015shashankmay18Noch keine Bewertungen
- Domlabmanualnew 110517072428 Phpapp02Dokument44 SeitenDomlabmanualnew 110517072428 Phpapp02Mandeep Singh PundirNoch keine Bewertungen
- 1.mechanics of MachineryDokument12 Seiten1.mechanics of Machineryram jrpsNoch keine Bewertungen
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABDokument6 SeitenIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringNoch keine Bewertungen
- 9A03401 Kinematics of MachineryDokument8 Seiten9A03401 Kinematics of MachinerysivabharathamurthyNoch keine Bewertungen
- Assignment 2 KDMDokument2 SeitenAssignment 2 KDMvishalNoch keine Bewertungen
- Mechanical EngineeringDokument243 SeitenMechanical EngineeringJaya sankarNoch keine Bewertungen
- Kinematics of Machinery November Am Rr222105Dokument12 SeitenKinematics of Machinery November Am Rr222105Nizam Institute of Engineering and Technology LibraryNoch keine Bewertungen
- Velocity - Acceleration DiagramDokument9 SeitenVelocity - Acceleration DiagramvisheshNoch keine Bewertungen
- Unit-1: Introduction: Question BankDokument12 SeitenUnit-1: Introduction: Question BankAmit BharadwajNoch keine Bewertungen
- Kinematics of Machinery Question BankDokument7 SeitenKinematics of Machinery Question BankpanneerthambiNoch keine Bewertungen
- EJERCICIOS MECANISMOS - Javier Fuentes CDokument10 SeitenEJERCICIOS MECANISMOS - Javier Fuentes CVictor MartinezNoch keine Bewertungen
- Exercises: Theory of MachinesDokument4 SeitenExercises: Theory of Machinesgangadharan tharumarNoch keine Bewertungen
- Tutorial-2 NewDokument2 SeitenTutorial-2 NewAbhishek SharmaNoch keine Bewertungen
- B.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFDokument12 SeitenB.Tech (PT) - Mechanical - II YEAR - III SEM - (R) 2012 PDFmohamed irshadNoch keine Bewertungen
- 06me44 Dec 13 VTUDokument2 Seiten06me44 Dec 13 VTUArun DixitNoch keine Bewertungen
- Co-Simulation of A Crank - Slider Servo Mechanism: October 2015Dokument8 SeitenCo-Simulation of A Crank - Slider Servo Mechanism: October 2015Douai LinNoch keine Bewertungen
- Gujarat Technological UniversityDokument3 SeitenGujarat Technological UniversityKrinal AdakiNoch keine Bewertungen
- Kinematics of Machinery Question BankDokument5 SeitenKinematics of Machinery Question BankSree MurthyNoch keine Bewertungen
- Classical and Modern Approaches in the Theory of MechanismsVon EverandClassical and Modern Approaches in the Theory of MechanismsNoch keine Bewertungen
- Modern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlVon EverandModern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlNoch keine Bewertungen
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationVon EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationNoch keine Bewertungen
- Materials Science and Technology of Optical FabricationVon EverandMaterials Science and Technology of Optical FabricationNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Preview: Purdue UniversityDokument24 SeitenPreview: Purdue UniversitypandirajaNoch keine Bewertungen
- Interview Schedule (Phase - I) Maharashtra Civil Engineering Services Main Examination - 2018Dokument4 SeitenInterview Schedule (Phase - I) Maharashtra Civil Engineering Services Main Examination - 2018pandirajaNoch keine Bewertungen
- Gdjvdjdsbveiruuvf N Vuvewfkbvl VBV V VKB VVJDCDokument1 SeiteGdjvdjdsbveiruuvf N Vuvewfkbvl VBV V VKB VVJDCpandirajaNoch keine Bewertungen
- Newfeat512 PDFDokument146 SeitenNewfeat512 PDFpandirajaNoch keine Bewertungen
- Endorsement Certificate From The Host InstituteDokument1 SeiteEndorsement Certificate From The Host InstitutepandirajaNoch keine Bewertungen
- Program Educational Objectives:-: Peo IDokument2 SeitenProgram Educational Objectives:-: Peo IpandirajaNoch keine Bewertungen
- EdDokument1 SeiteEdpandirajaNoch keine Bewertungen
- Indomitable SpiritDokument1 SeiteIndomitable SpiritpandirajaNoch keine Bewertungen
- Lab 02 - Volumetric Measuring and Making SolutionsDokument10 SeitenLab 02 - Volumetric Measuring and Making SolutionsAbram TorontoNoch keine Bewertungen
- TX-SR505 Onkyo Service ManualDokument118 SeitenTX-SR505 Onkyo Service ManualszynszylkNoch keine Bewertungen
- T3 ME Performance Record Jan TemplateDokument5 SeitenT3 ME Performance Record Jan TemplateMuhd Khir RazaniNoch keine Bewertungen
- Conductive Polymer Chip Tantalum Capacitor: 9664NEOVOL03E1603E1 Printed in JapanDokument38 SeitenConductive Polymer Chip Tantalum Capacitor: 9664NEOVOL03E1603E1 Printed in Japanyusuf noorNoch keine Bewertungen
- Ca Vcontact-Vsc (En S2) D 1VCP000532 PDFDokument56 SeitenCa Vcontact-Vsc (En S2) D 1VCP000532 PDFGustavo Rodrigo SantanaNoch keine Bewertungen
- Product Data Sheet: iC60N - Miniature Circuit Breaker - 1P - 32A - C CurveDokument3 SeitenProduct Data Sheet: iC60N - Miniature Circuit Breaker - 1P - 32A - C CurveLaviniu S. NacuNoch keine Bewertungen
- Nutritional Status DepedDokument15 SeitenNutritional Status DepedYvette Faith BaculioNoch keine Bewertungen
- JAROL Assumes The Promotion of Energy-Saving Technology As Its Own Task! 1. PREFACE NOTICEDokument182 SeitenJAROL Assumes The Promotion of Energy-Saving Technology As Its Own Task! 1. PREFACE NOTICEtrash49450% (2)
- DC Bus Voltage RegulationDokument2 SeitenDC Bus Voltage RegulationHasRasfaNoch keine Bewertungen
- Energy, Work & Power 09 QPDokument10 SeitenEnergy, Work & Power 09 QPRahat RizwanNoch keine Bewertungen
- Analysis of A Microwave Graphene-Based Patch Antenna: Luca Pierantoni Mircea Dragoman Davide MencarelliDokument3 SeitenAnalysis of A Microwave Graphene-Based Patch Antenna: Luca Pierantoni Mircea Dragoman Davide MencarellizahraNoch keine Bewertungen
- 08-08-19 Sri Chaitanya-Jr - Chaina-I Jee-Adv (2014 P2) WTA-13 Q.PDokument28 Seiten08-08-19 Sri Chaitanya-Jr - Chaina-I Jee-Adv (2014 P2) WTA-13 Q.PPRANITH REDDYNoch keine Bewertungen
- Pyramidal Horn Antenna: Model 3160 SeriesDokument88 SeitenPyramidal Horn Antenna: Model 3160 SeriesMahendra SinghNoch keine Bewertungen
- 38,202 - Renewable ProjectDokument40 Seiten38,202 - Renewable ProjectAnas AyubNoch keine Bewertungen
- Anemometro ManualDokument8 SeitenAnemometro Manualjose norberto santillan zazuetaNoch keine Bewertungen
- Question 1Dokument8 SeitenQuestion 1abdul wahabNoch keine Bewertungen
- HPS Catalogue Transformer Products Web Version PDFDokument325 SeitenHPS Catalogue Transformer Products Web Version PDFMoch Abduh AlcantaraNoch keine Bewertungen
- Lesson Plan I. Objectives: at The End of The Lesson, Students Will Be Able ToDokument2 SeitenLesson Plan I. Objectives: at The End of The Lesson, Students Will Be Able ToAlyssa GurangoNoch keine Bewertungen
- What Is Perpendicular ForceDokument1 SeiteWhat Is Perpendicular ForceseinsheillNoch keine Bewertungen
- Quasi-Steady State Model of An Ice Rink Refrigeration System PDFDokument14 SeitenQuasi-Steady State Model of An Ice Rink Refrigeration System PDFSantanu DattaNoch keine Bewertungen
- Class 10: Class 10 Electricity Important QuestionsDokument45 SeitenClass 10: Class 10 Electricity Important QuestionsSoma Paine SardarNoch keine Bewertungen
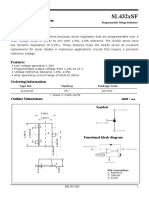
- SL432xSF: DescriptionDokument5 SeitenSL432xSF: Descriptionserrano.flia.coNoch keine Bewertungen
- Wind Energy Fundamentals With KPIs 1690991145Dokument9 SeitenWind Energy Fundamentals With KPIs 1690991145Rahul AgarwalNoch keine Bewertungen
- Wiring Diagrams - 12 Volt Planet Knowledge CentreDokument2 SeitenWiring Diagrams - 12 Volt Planet Knowledge CentreLong JidinNoch keine Bewertungen
- Samsung Product List - 1Dokument38 SeitenSamsung Product List - 1Nishant SinhaNoch keine Bewertungen
- Lecture - 8: Fluid Motion: Streamlines EtcDokument13 SeitenLecture - 8: Fluid Motion: Streamlines Etcrohit singhNoch keine Bewertungen
- Operador PanasonicDokument96 SeitenOperador PanasonicVilla Robert RamoaNoch keine Bewertungen
- Egedik Ionanofluid Manuscript 3marchDokument26 SeitenEgedik Ionanofluid Manuscript 3marchabdullaalakourNoch keine Bewertungen