Das könnte Ihnen auch gefallen
- 1 Analytical Part (3 Percent Grade) : + + + 1 N I: y +1 I 1 N I: y 1 IDokument5 Seiten1 Analytical Part (3 Percent Grade) : + + + 1 N I: y +1 I 1 N I: y 1 IMuhammad Hur RizviNoch keine Bewertungen
- Assignment 2 SpecificationDokument3 SeitenAssignment 2 SpecificationRazinNoch keine Bewertungen
- CS 229, Autumn 2017 Problem Set #4: EM, DL & RLDokument10 SeitenCS 229, Autumn 2017 Problem Set #4: EM, DL & RLnxp HeNoch keine Bewertungen
- Cs 229, Spring 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryDokument8 SeitenCs 229, Spring 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryAchuthan SekarNoch keine Bewertungen
- Machine Learning: E0270 2015 Assignment 4: Due March 24 Before ClassDokument3 SeitenMachine Learning: E0270 2015 Assignment 4: Due March 24 Before ClassMahesh YadaNoch keine Bewertungen
- CS246 Hw1Dokument5 SeitenCS246 Hw1sudh123456Noch keine Bewertungen
- CPSC 540 Assignment 1 (Due January 19)Dokument9 SeitenCPSC 540 Assignment 1 (Due January 19)JohnnyDoe0x27ANoch keine Bewertungen
- Engineering Computer Applications: Numeric, Cell, and Structure ArraysDokument43 SeitenEngineering Computer Applications: Numeric, Cell, and Structure ArraysahmadNoch keine Bewertungen
- Exercise 03Dokument5 SeitenExercise 03gfjggNoch keine Bewertungen
- Solution First Point ML-HW4Dokument6 SeitenSolution First Point ML-HW4Juan Sebastian Otálora Montenegro100% (1)
- Another Introduction SVMDokument4 SeitenAnother Introduction SVMisma_shadyNoch keine Bewertungen
- Assignment 1Dokument2 SeitenAssignment 1ArjunNoch keine Bewertungen
- Matlab Assignment-01 SEM-II-2016-2017 PDFDokument5 SeitenMatlab Assignment-01 SEM-II-2016-2017 PDFfarhanfendiNoch keine Bewertungen
- CIS 520, Machine Learning, Fall 2015: Assignment 2 Due: Friday, September 18th, 11:59pm (Via Turnin)Dokument3 SeitenCIS 520, Machine Learning, Fall 2015: Assignment 2 Due: Friday, September 18th, 11:59pm (Via Turnin)DiDo Mohammed AbdullaNoch keine Bewertungen
- Massachusetts Institute of Technology: 6.867 Machine Learning, Fall 2006 Problem Set 2: SolutionsDokument7 SeitenMassachusetts Institute of Technology: 6.867 Machine Learning, Fall 2006 Problem Set 2: Solutionsjuanagallardo01Noch keine Bewertungen
- hw2 311Dokument4 Seitenhw2 311john doeNoch keine Bewertungen
- HW 1Dokument4 SeitenHW 1sagar0596Noch keine Bewertungen
- Multidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)Dokument12 SeitenMultidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)vinod3457Noch keine Bewertungen
- Mock Question SamplesDokument3 SeitenMock Question SamplesMUHAMMAD AHADNoch keine Bewertungen
- Machine Learning AssignmentsDokument3 SeitenMachine Learning AssignmentsUjesh MauryaNoch keine Bewertungen
- HW 7Dokument4 SeitenHW 7adithya604Noch keine Bewertungen
- Project C: Dr. Shahin Tavakoli Applied Bayesian Statistics Project 1Dokument2 SeitenProject C: Dr. Shahin Tavakoli Applied Bayesian Statistics Project 1方鑫然Noch keine Bewertungen
- Homework Exercise 4: Statistical Learning, Fall 2020-21Dokument3 SeitenHomework Exercise 4: Statistical Learning, Fall 2020-21Elinor RahamimNoch keine Bewertungen
- CS5785 Homework 4: .PDF .Py .IpynbDokument5 SeitenCS5785 Homework 4: .PDF .Py .IpynbAl TarinoNoch keine Bewertungen
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDokument29 SeitenA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113Noch keine Bewertungen
- Assignment 3Dokument5 SeitenAssignment 3Siddhant SanjeevNoch keine Bewertungen
- Assignment 1 LabDokument14 SeitenAssignment 1 LabUzair AshfaqNoch keine Bewertungen
- Homework 2: CS 178: Machine Learning: Spring 2020Dokument3 SeitenHomework 2: CS 178: Machine Learning: Spring 2020Jonathan NguyenNoch keine Bewertungen
- Csc349a f2023 Asn3Dokument4 SeitenCsc349a f2023 Asn3mileskticknerNoch keine Bewertungen
- EE-232: Signals and Systems Lab 2: Plotting and Array Processing in MATLABDokument16 SeitenEE-232: Signals and Systems Lab 2: Plotting and Array Processing in MATLABMuhammad Uzair KhanNoch keine Bewertungen
- Using Matlab: Page 1 of 3 Spring Semester 2012Dokument3 SeitenUsing Matlab: Page 1 of 3 Spring Semester 2012Alexand MelialaNoch keine Bewertungen
- E9 205 - Machine Learning For Signal ProcessingDokument3 SeitenE9 205 - Machine Learning For Signal Processingrishi guptaNoch keine Bewertungen
- Kernal Methods Machine LearningDokument53 SeitenKernal Methods Machine LearningpalaniNoch keine Bewertungen
- MatplotlibDokument15 SeitenMatplotlibSteve OkumuNoch keine Bewertungen
- Homework 6Dokument5 SeitenHomework 6Muhammad MurtazaNoch keine Bewertungen
- Home Exercise 3: Dynamic Programming and Randomized AlgorithmsDokument5 SeitenHome Exercise 3: Dynamic Programming and Randomized AlgorithmsJaokdNoch keine Bewertungen
- P (D - C) P (C) : C Argmax C CDokument4 SeitenP (D - C) P (C) : C Argmax C Camin kaiserNoch keine Bewertungen
- Lab 11 (Last Lab) - Lab 10 and Crib Sheet Are Attached To This Document Problem 11-1Dokument5 SeitenLab 11 (Last Lab) - Lab 10 and Crib Sheet Are Attached To This Document Problem 11-1Massie ArueyinghoNoch keine Bewertungen
- Matlab TutorialDokument18 SeitenMatlab TutorialUmair ShahidNoch keine Bewertungen
- Basic Operations in Image Processing: ObjectivesDokument6 SeitenBasic Operations in Image Processing: ObjectivesAamir ChohanNoch keine Bewertungen
- Ex 6Dokument16 SeitenEx 6Pardhasaradhi NallamothuNoch keine Bewertungen
- Cubic SplinesDokument6 SeitenCubic SplinesAleksa Aki LazarevicNoch keine Bewertungen
- ISC 2011 Computer Science Theory PaperDokument9 SeitenISC 2011 Computer Science Theory Paperiamsrijit100% (2)
- 178 hw3Dokument3 Seiten178 hw3jagaenatorNoch keine Bewertungen
- CS 3510 Homework 1 QDokument7 SeitenCS 3510 Homework 1 Qjacksonluke2016babyNoch keine Bewertungen
- Practice MidtermDokument4 SeitenPractice MidtermArka MitraNoch keine Bewertungen
- Homework 2: SVM, Kernel Methods, Ensemble Learning, Learning TheoryDokument12 SeitenHomework 2: SVM, Kernel Methods, Ensemble Learning, Learning TheoryAli AhmadNoch keine Bewertungen
- 04 Input and OutputDokument10 Seiten04 Input and OutputnegisbabiNoch keine Bewertungen
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Dokument7 SeitenProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNoch keine Bewertungen
- Tutorial 6Dokument8 SeitenTutorial 6POEASONoch keine Bewertungen
- Homework 2 - Handwriting: Grading PolicyDokument3 SeitenHomework 2 - Handwriting: Grading Policyvickychen910716Noch keine Bewertungen
- 10-601 Machine Learning: Homework 7: InstructionsDokument5 Seiten10-601 Machine Learning: Homework 7: InstructionsSasanka Sekhar SahuNoch keine Bewertungen
- R IntroductionDokument40 SeitenR IntroductionSEbastian CardozoNoch keine Bewertungen
- Lab #2 Signal Ploting and Matrix Operatons in MatlabDokument17 SeitenLab #2 Signal Ploting and Matrix Operatons in MatlabNihal AhmadNoch keine Bewertungen
- ML PG Assignment 3Dokument3 SeitenML PG Assignment 3sonu23144Noch keine Bewertungen
- IN5400 - Machine Learning For Image AnalysisDokument6 SeitenIN5400 - Machine Learning For Image AnalysisJohanne SaxegaardNoch keine Bewertungen
- Matlab Chapter 1Dokument65 SeitenMatlab Chapter 1Abhilash MallikarjunaNoch keine Bewertungen
- DSP LAB ManualCompleteDokument64 SeitenDSP LAB ManualCompleteHamzaAliNoch keine Bewertungen
- Impact of Online LearningDokument16 SeitenImpact of Online LearningJessabel RafalloNoch keine Bewertungen
- Gilbert CH 6 TXTBK NotesDokument3 SeitenGilbert CH 6 TXTBK NotesBillie WrobleskiNoch keine Bewertungen
- QAC Annual Report 2019'20Dokument20 SeitenQAC Annual Report 2019'20Kidz to Adultz ExhibitionsNoch keine Bewertungen
- Peg Leg The Pirate DesignDokument4 SeitenPeg Leg The Pirate Designapi-371644744Noch keine Bewertungen
- There Is More Intellect Than Emotions in Our Way of Life - DebateDokument2 SeitenThere Is More Intellect Than Emotions in Our Way of Life - DebateMrinal Tripathi0% (1)
- History of Health EducationDokument6 SeitenHistory of Health EducationCorrine Ivy100% (2)
- The Effect of Modular Distance Learning in Academic Behavior and Performance Among Senior HighDokument19 SeitenThe Effect of Modular Distance Learning in Academic Behavior and Performance Among Senior HighJESSIE DELA CRUZNoch keine Bewertungen
- Proverbs 1: Prov, Christ's Death in TheDokument24 SeitenProverbs 1: Prov, Christ's Death in TheO Canal da Graça de Deus - Zé & SandraNoch keine Bewertungen
- Unit 5 Mock Paper1Dokument78 SeitenUnit 5 Mock Paper1SahanNivanthaNoch keine Bewertungen
- Princess Jhobjie Celin DivinagraciaDokument2 SeitenPrincess Jhobjie Celin DivinagraciaPrincess Jhobie Celin DivinagraciaNoch keine Bewertungen
- RGB Line FollowerDokument5 SeitenRGB Line FollowerTbotics EducationNoch keine Bewertungen
- The Reaction Paper, Review, and CritiqueDokument16 SeitenThe Reaction Paper, Review, and CritiqueChristian PapaNoch keine Bewertungen
- Why Should White Guys Have All The Fun? Reginald F. Lewis, African American EntrepreneurDokument25 SeitenWhy Should White Guys Have All The Fun? Reginald F. Lewis, African American EntrepreneurJim67% (3)
- Health Design Thinking An Innovative Approach in PDokument6 SeitenHealth Design Thinking An Innovative Approach in PElena AlnaderNoch keine Bewertungen
- Orthodox Sunday School CurriculumDokument3 SeitenOrthodox Sunday School Curriculumkmt tubeNoch keine Bewertungen
- Tantric Meditations and PracticesDokument2 SeitenTantric Meditations and PracticesMihály FerenczNoch keine Bewertungen
- The Four Pillars of EducationDokument10 SeitenThe Four Pillars of EducationTristan BabaylanNoch keine Bewertungen
- UntitledDokument3 SeitenUntitledBanothile PromiseNoch keine Bewertungen
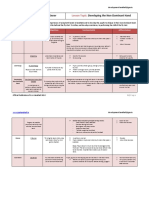
- Lesson 4 - Developing The Non-Dominant HandDokument6 SeitenLesson 4 - Developing The Non-Dominant HandBlaja AroraArwen AlexisNoch keine Bewertungen
- Republic of Turkey Turkish National Defense University Army Nco Vocational He SchoolDokument22 SeitenRepublic of Turkey Turkish National Defense University Army Nco Vocational He SchoolBoss MasterNoch keine Bewertungen
- 5e Lesson PlanDokument2 Seiten5e Lesson Planapi-724497757Noch keine Bewertungen
- Understanding College Students With Physical DisabilitiesDokument234 SeitenUnderstanding College Students With Physical Disabilitieshana fentaNoch keine Bewertungen
- A1006770035 - 25684 - 13 - 2021 - Ca1 Soc 111Dokument5 SeitenA1006770035 - 25684 - 13 - 2021 - Ca1 Soc 111Naikoo DanishNoch keine Bewertungen
- Key Point Slides - Ch5Dokument21 SeitenKey Point Slides - Ch5Nuzul DwiNoch keine Bewertungen
- Training Needs Analysis FormDokument5 SeitenTraining Needs Analysis FormPiyush SevenseasNoch keine Bewertungen
- Dnyaneshwari: The Philosophical PartDokument6 SeitenDnyaneshwari: The Philosophical PartGargaNoch keine Bewertungen
- Volleyball Unit PlanDokument45 SeitenVolleyball Unit Planapi-347625375Noch keine Bewertungen
- Assignment Set No. 3 - Nieva O. MairinaDokument6 SeitenAssignment Set No. 3 - Nieva O. MairinaNieva MairinaNoch keine Bewertungen
- Sim Isso É IncrivelDokument3 SeitenSim Isso É IncrivelRenan RezendeNoch keine Bewertungen
- Cover Letter For NeurosurgeonDokument6 SeitenCover Letter For Neurosurgeondthtrtlfg100% (2)