Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Hsslive-XI-Chemistry-Simplified Notes For 1 Improvement ExamDokument35 SeitenHsslive-XI-Chemistry-Simplified Notes For 1 Improvement ExamLingesh Waran100% (3)
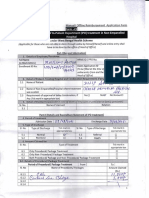
- Fir Format For KapsitDokument15 SeitenFir Format For Kapsitanirbanpwd76Noch keine Bewertungen
- Design of Reinforced Concrete FoundationsDokument16 SeitenDesign of Reinforced Concrete Foundationsanirbanpwd76Noch keine Bewertungen
- Chemical Hazards at Construction SitesDokument1 SeiteChemical Hazards at Construction Sitesanirbanpwd76Noch keine Bewertungen
- DN 600m Amirabad 3Dokument5 SeitenDN 600m Amirabad 3anirbanpwd76Noch keine Bewertungen
- Img 20210502 0001Dokument4 SeitenImg 20210502 0001anirbanpwd76Noch keine Bewertungen
- Design of Shear Reinforcement in RCC Structures: Intended Learning Outcomes (ILO)Dokument16 SeitenDesign of Shear Reinforcement in RCC Structures: Intended Learning Outcomes (ILO)anirbanpwd76Noch keine Bewertungen
- 1118mm - Thickness Calculator For MS or DI PipesDokument8 Seiten1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Noch keine Bewertungen
- 1118mm - Thickness Calculator For MS or DI PipesDokument8 Seiten1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Noch keine Bewertungen
- Atm 2Dokument1 SeiteAtm 2anirbanpwd76Noch keine Bewertungen
- 1118mm - Thickness Calculator For MS or DI PipesDokument8 Seiten1118mm - Thickness Calculator For MS or DI Pipesanirbanpwd76Noch keine Bewertungen
- Mou Asset ForwardingDokument1 SeiteMou Asset Forwardinganirbanpwd76Noch keine Bewertungen
- Asbestos Cement Pipes - A Showcase of Underutilized TechnologyDokument2 SeitenAsbestos Cement Pipes - A Showcase of Underutilized Technologyanirbanpwd76Noch keine Bewertungen
- Technical Data Pertaining To Source For Clearance by State Level Scheme Sanctioning CommitteeDokument3 SeitenTechnical Data Pertaining To Source For Clearance by State Level Scheme Sanctioning Committeeanirbanpwd76Noch keine Bewertungen
- The Procedure Used For Driven Pile Can Be Used For Bored Piles Also But The inDokument1 SeiteThe Procedure Used For Driven Pile Can Be Used For Bored Piles Also But The inanirbanpwd76Noch keine Bewertungen
- Unified Schedule of Rates Iw DeptDokument96 SeitenUnified Schedule of Rates Iw Deptanirbanpwd76Noch keine Bewertungen
- To SPDokument1 SeiteTo SPanirbanpwd76Noch keine Bewertungen
- Forwarding DCRC Estimates 2016Dokument2 SeitenForwarding DCRC Estimates 2016anirbanpwd76Noch keine Bewertungen
- Software Overview:-Surfer 8.0Dokument1 SeiteSoftware Overview:-Surfer 8.0anirbanpwd76Noch keine Bewertungen
- Mod FlowDokument2 SeitenMod Flowanirbanpwd76Noch keine Bewertungen
- LED Thermal Management Basics For PCB DesignersDokument63 SeitenLED Thermal Management Basics For PCB DesignersSaturn Electronics CorporationNoch keine Bewertungen
- Assignment 1: Introduction To Aircraft StructuresDokument4 SeitenAssignment 1: Introduction To Aircraft StructuresLv NanhengNoch keine Bewertungen
- Evaluation of Design of Rear AxleDokument6 SeitenEvaluation of Design of Rear AxleAbhijeet PandeyNoch keine Bewertungen
- Ruiz.l - Quiz 2Dokument3 SeitenRuiz.l - Quiz 2lucio ruiz jrNoch keine Bewertungen
- Mekanika Teknik: Teknik Bangunan Dan Landasan 2018Dokument465 SeitenMekanika Teknik: Teknik Bangunan Dan Landasan 2018damdomie rasyidNoch keine Bewertungen
- History of Science Pointers 1Dokument5 SeitenHistory of Science Pointers 1John Andrew ConsultaNoch keine Bewertungen
- Flow Meter Lab ReportDokument28 SeitenFlow Meter Lab ReportMadiha Zaimuri50% (2)
- Department of Aeronautical Engineering: Answer All The Questions: Part - A (10 X 2 20 MARKS)Dokument2 SeitenDepartment of Aeronautical Engineering: Answer All The Questions: Part - A (10 X 2 20 MARKS)RajakumariNoch keine Bewertungen
- Final Term Module #1: Prepared By: Engr. Peter E. BacaronDokument15 SeitenFinal Term Module #1: Prepared By: Engr. Peter E. BacaronJohn RivasNoch keine Bewertungen
- A Study On Enhancement of Filtration Process With Filter Aids Diatomaceous Earth and Wood Pulp CelluloseDokument7 SeitenA Study On Enhancement of Filtration Process With Filter Aids Diatomaceous Earth and Wood Pulp CellulosegoldennanukNoch keine Bewertungen
- 0625 s14 QP 33 PDFDokument20 Seiten0625 s14 QP 33 PDFHaider AliNoch keine Bewertungen
- Master1 AM CoursesDokument3 SeitenMaster1 AM CoursesParokotil MidhunNoch keine Bewertungen
- Solutions To Problems in Modern QuantumDokument9 SeitenSolutions To Problems in Modern QuantumFabrício MendesNoch keine Bewertungen
- FBG & Circulator - 2Dokument6 SeitenFBG & Circulator - 2doppler9effectNoch keine Bewertungen
- ANSI ESD SP15.1-2005 Standard Practice For In-Use Resistance Tetsing of Gloves and Finger CotsDokument16 SeitenANSI ESD SP15.1-2005 Standard Practice For In-Use Resistance Tetsing of Gloves and Finger Cotssmalnif0% (1)
- StewartCalcET8 15 05Dokument12 SeitenStewartCalcET8 15 05OhoodKAlesayiNoch keine Bewertungen
- Mobile Radio Propagation: Large-Scale Path LossDokument4 SeitenMobile Radio Propagation: Large-Scale Path LossQusai HammashNoch keine Bewertungen
- 07 Mixing - Food Process Engineering TechnologyDokument25 Seiten07 Mixing - Food Process Engineering Technologyecky_moury6742Noch keine Bewertungen
- Flux Screen For GeneratorsDokument13 SeitenFlux Screen For GeneratorsMichal KowalczykNoch keine Bewertungen
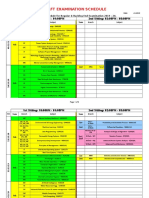
- Draft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMDokument8 SeitenDraft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMBiswajit mallickNoch keine Bewertungen
- Note On Vector AnalysisDokument37 SeitenNote On Vector AnalysisNabil MunshiNoch keine Bewertungen
- Applications of Lie Groups To Differential Equations, by Peter J. Olver. GraduateDokument6 SeitenApplications of Lie Groups To Differential Equations, by Peter J. Olver. GraduateNilesh SinghalNoch keine Bewertungen
- Global Sliding Mode ControlDokument9 SeitenGlobal Sliding Mode ControlYazdan RastegarNoch keine Bewertungen
- Vascozitate IntrinsecaDokument10 SeitenVascozitate IntrinsecaalexaNoch keine Bewertungen
- Chapter (2) Atomic Structure and BondingDokument56 SeitenChapter (2) Atomic Structure and BondingJessica De GuzmanNoch keine Bewertungen
- Multiple Integrals Over Non-Rectangular RegionsDokument21 SeitenMultiple Integrals Over Non-Rectangular RegionsCodrutaNoch keine Bewertungen
- Lec 05 Highway Engineering - Curve SuperelevationDokument13 SeitenLec 05 Highway Engineering - Curve SuperelevationDr Firas Asad100% (8)
- Link DAMPER ELEMENTDokument9 SeitenLink DAMPER ELEMENTJess VasNoch keine Bewertungen
- The Optimum Coolant Temperature For Maruti 800 Engine Is Around 92 DegreesDokument3 SeitenThe Optimum Coolant Temperature For Maruti 800 Engine Is Around 92 DegreesMohseen KarcheNoch keine Bewertungen