Das könnte Ihnen auch gefallen
- Answers To Selected Exercise Problems StrogatzDokument9 SeitenAnswers To Selected Exercise Problems StrogatzbalterNoch keine Bewertungen
- Flightsafety International: Q400 Maintenance Initial Week 4 Homework Questions Atas 51-57, 25, 34, 22, 33, 35, 49, 38Dokument29 SeitenFlightsafety International: Q400 Maintenance Initial Week 4 Homework Questions Atas 51-57, 25, 34, 22, 33, 35, 49, 38om prakash patelNoch keine Bewertungen
- Nike CaseDokument21 SeitenNike CaseAnksNoch keine Bewertungen
- GPS and GSM Based Vehicle Tracking SystemDokument16 SeitenGPS and GSM Based Vehicle Tracking SystemShreyas Sridhar0% (2)
- Jose Gamarra FIEEDokument8 SeitenJose Gamarra FIEEErick Carhuas RomeroNoch keine Bewertungen
- DiffunderintDokument20 SeitenDiffunderintdogbitesmanNoch keine Bewertungen
- Differentiating Under The Integral SignDokument23 SeitenDifferentiating Under The Integral SignsekharsamyNoch keine Bewertungen
- Diffunderint Leibniz Rule and IntegralsDokument28 SeitenDiffunderint Leibniz Rule and Integralsab cNoch keine Bewertungen
- DiffunderintDokument26 SeitenDiffunderintY SalahNoch keine Bewertungen
- DiffunderintDokument28 SeitenDiffunderintDhruvajyoti SahaNoch keine Bewertungen
- M1120 Calculus (VIII) LectureDokument9 SeitenM1120 Calculus (VIII) LectureDan VazNoch keine Bewertungen
- Exercicios Integracao DefinidaDokument14 SeitenExercicios Integracao DefinidaEdmilson RicardoNoch keine Bewertungen
- UCSB MATH 5C Problems 1 SolutionsDokument4 SeitenUCSB MATH 5C Problems 1 SolutionsAaron ひろき ZhangNoch keine Bewertungen
- AMATH 231 Calculus IV Solutions A2Dokument7 SeitenAMATH 231 Calculus IV Solutions A2Forsen ShungiteNoch keine Bewertungen
- MAT1332 NotesDokument106 SeitenMAT1332 Notespeonyvu05Noch keine Bewertungen
- 104 Spring 06 AnswDokument5 Seiten104 Spring 06 AnswJanry GarciaNoch keine Bewertungen
- Quiz 4 SolutionsDokument8 SeitenQuiz 4 Solutionsharsh gargNoch keine Bewertungen
- Solution To HW#3: Yucheng Tu and Sean Curry May 6, 2019Dokument7 SeitenSolution To HW#3: Yucheng Tu and Sean Curry May 6, 2019I KAZZENoch keine Bewertungen
- X Integrals 6Dokument1 SeiteX Integrals 6MasudRanaNoch keine Bewertungen
- Assignment 2 Continuum Mechanics (4MT317) 2019: J J J J JDokument3 SeitenAssignment 2 Continuum Mechanics (4MT317) 2019: J J J J JElvir PecoNoch keine Bewertungen
- T Tan X SubstitutionDokument6 SeitenT Tan X Substitutioneternalpatron93Noch keine Bewertungen
- The parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Dokument4 SeitenThe parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Forsen ShungiteNoch keine Bewertungen
- Mathematical Modeling and Computation in FinanceDokument3 SeitenMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNoch keine Bewertungen
- R3 SolDokument3 SeitenR3 Solxesef93262Noch keine Bewertungen
- Binomni DiferencijalDokument5 SeitenBinomni DiferencijalArcibaldMilicNoch keine Bewertungen
- Analisis Sistem Kendali #3Dokument57 SeitenAnalisis Sistem Kendali #3AriNoch keine Bewertungen
- Signal and System HW1 - SolutionDokument6 SeitenSignal and System HW1 - Solutioneccyu97Noch keine Bewertungen
- 1a Lista de T Ecnica de Integra C Ao - Primitivas ImediatasDokument2 Seiten1a Lista de T Ecnica de Integra C Ao - Primitivas ImediatasDetonadorJVCNoch keine Bewertungen
- Corrección de Lección de Cálculo Integral (11-Junio-2010) #1Dokument7 SeitenCorrección de Lección de Cálculo Integral (11-Junio-2010) #1Anirak AnedNoch keine Bewertungen
- MATH 231 Exam ReviewDokument15 SeitenMATH 231 Exam ReviewJiaqi TangNoch keine Bewertungen
- Solutions: MATH 214-2 - Fall 2000 - First Midterm (Solutions)Dokument6 SeitenSolutions: MATH 214-2 - Fall 2000 - First Midterm (Solutions)LopitalsNoch keine Bewertungen
- MA2002 Tutorial7Dokument3 SeitenMA2002 Tutorial7yu hanyueNoch keine Bewertungen
- Practice Problems: Trig SubstitutionDokument6 SeitenPractice Problems: Trig SubstitutionJanry GarciaNoch keine Bewertungen
- Institute of Electrical and Electronic EngineeringDokument48 SeitenInstitute of Electrical and Electronic EngineeringКдйікі КциNoch keine Bewertungen
- E C T C E: 1 - 2 1 Coeff. of 1 2Dokument1 SeiteE C T C E: 1 - 2 1 Coeff. of 1 2MasudRanaNoch keine Bewertungen
- Trigo SubstitutionDokument4 SeitenTrigo SubstitutionAdobo ToyoNoch keine Bewertungen
- Ma1102R Calculus Lesson 17: Wang FeiDokument5 SeitenMa1102R Calculus Lesson 17: Wang FeidelsonwiestNoch keine Bewertungen
- 1551 FinalExam ProblemBank SolDokument54 Seiten1551 FinalExam ProblemBank SolPedro TNoch keine Bewertungen
- Solution 11Dokument9 SeitenSolution 11GirlNoch keine Bewertungen
- 201900MA112FAssign2 SolutionDokument7 Seiten201900MA112FAssign2 SolutionAndrew JnrNoch keine Bewertungen
- Arfken MMCH 10 S 1 e 5Dokument3 SeitenArfken MMCH 10 S 1 e 5QuratulainNoch keine Bewertungen
- Chap 1 5 Chain RulesDokument15 SeitenChap 1 5 Chain RulesTharshini SuriyakumarNoch keine Bewertungen
- All Calc 2 Integration Techniques: (50 Integrals For Calc 2 Students)Dokument5 SeitenAll Calc 2 Integration Techniques: (50 Integrals For Calc 2 Students)吴绍轩Noch keine Bewertungen
- MATH2374 Section7 2Dokument4 SeitenMATH2374 Section7 2kdNoch keine Bewertungen
- Sample Calculus Final: Joy Nicholson July 28, 1998Dokument3 SeitenSample Calculus Final: Joy Nicholson July 28, 1998Prem MozumderNoch keine Bewertungen
- Unit-4, Vector Differential CalculusDokument31 SeitenUnit-4, Vector Differential CalculusSujatha VivekNoch keine Bewertungen
- Maths XII KV PreboardDokument8 SeitenMaths XII KV Preboardaamiralishiasbackup1Noch keine Bewertungen
- Math301 CH12.1Dokument10 SeitenMath301 CH12.1EMADNoch keine Bewertungen
- Appendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumDokument5 SeitenAppendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumOliver KrausNoch keine Bewertungen
- Integration. Exercise 1Dokument8 SeitenIntegration. Exercise 1HeldzistNoch keine Bewertungen
- 001 Calculo Integral 2017Dokument2 Seiten001 Calculo Integral 2017Royer JorgeNoch keine Bewertungen
- Dy DX Dy DT DT DX /DT CSC CSCDokument2 SeitenDy DX Dy DT DT DX /DT CSC CSCAlfredo KawengianNoch keine Bewertungen
- Fundamental Theorem of Calculus (Solutions)Dokument3 SeitenFundamental Theorem of Calculus (Solutions)KamilleX01Noch keine Bewertungen
- 2sin 3cos 2 Cos 3sin: X X T X XDX DTDokument1 Seite2sin 3cos 2 Cos 3sin: X X T X XDX DTMasudRanaNoch keine Bewertungen
- Elektrodinamika DemostratureDokument20 SeitenElektrodinamika DemostratureMarijaElricNoch keine Bewertungen
- Uconn ECE6439 Final 2015Dokument3 SeitenUconn ECE6439 Final 2015Nemo OutisNoch keine Bewertungen
- Math 113 Exam 1 W Solutions w2005 Calculus 2 David MurphyDokument4 SeitenMath 113 Exam 1 W Solutions w2005 Calculus 2 David MurphyUsama yousaf ButtNoch keine Bewertungen
- PDE Textbook (101 150)Dokument50 SeitenPDE Textbook (101 150)ancelmomtmtcNoch keine Bewertungen
- T DT X DX XDX DT: Sec SecDokument1 SeiteT DT X DX XDX DT: Sec SecMasudRanaNoch keine Bewertungen
- Integration Practice PDFDokument10 SeitenIntegration Practice PDFmarioasensicollantesNoch keine Bewertungen
- Fiesta 29 SolutionsDokument2 SeitenFiesta 29 SolutionsteachopensourceNoch keine Bewertungen
- Arc Length and Surface Area in Parametric Equations: MATH 211, Calculus IIDokument27 SeitenArc Length and Surface Area in Parametric Equations: MATH 211, Calculus IIAli ElbasryNoch keine Bewertungen
- Ma1102R Calculus Lesson 22: Wang FeiDokument9 SeitenMa1102R Calculus Lesson 22: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 21: Wang FeiDokument9 SeitenMa1102R Calculus Lesson 21: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 20: Wang FeiDokument9 SeitenMa1102R Calculus Lesson 20: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 23: Wang FeiDokument9 SeitenMa1102R Calculus Lesson 23: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 18: Wang FeiDokument8 SeitenMa1102R Calculus Lesson 18: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 17: Wang FeiDokument5 SeitenMa1102R Calculus Lesson 17: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 16: Wang FeiDokument16 SeitenMa1102R Calculus Lesson 16: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 11: Wang FeiDokument12 SeitenMa1102R Calculus Lesson 11: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 12: Wang FeiDokument11 SeitenMa1102R Calculus Lesson 12: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 14: Wang FeiDokument13 SeitenMa1102R Calculus Lesson 14: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 4: Wang FeiDokument12 SeitenMa1102R Calculus Lesson 4: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 15: Wang FeiDokument16 SeitenMa1102R Calculus Lesson 15: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 13: Wang FeiDokument11 SeitenMa1102R Calculus Lesson 13: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 8: Wang FeiDokument13 SeitenMa1102R Calculus Lesson 8: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 10: Wang FeiDokument14 SeitenMa1102R Calculus Lesson 10: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 5: Wang FeiDokument14 SeitenMa1102R Calculus Lesson 5: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 6: Wang FeiDokument13 SeitenMa1102R Calculus Lesson 6: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 8: Wang FeiDokument14 SeitenMa1102R Calculus Lesson 8: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 7: Wang FeiDokument14 SeitenMa1102R Calculus Lesson 7: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 2: Wang FeiDokument12 SeitenMa1102R Calculus Lesson 2: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 1: Wang FeiDokument12 SeitenMa1102R Calculus Lesson 1: Wang FeidelsonwiestNoch keine Bewertungen
- Ma1102R Calculus Lesson 3: Wang FeiDokument11 SeitenMa1102R Calculus Lesson 3: Wang FeidelsonwiestNoch keine Bewertungen
- Compiler Lab VivaDokument6 SeitenCompiler Lab VivaGaurav SharmaNoch keine Bewertungen
- Rajesh Vasa - PHD ThesisDokument252 SeitenRajesh Vasa - PHD Thesisrajeshvasa100% (1)
- αξεσουαρ SKODA CITIGO SPORTDokument7 Seitenαξεσουαρ SKODA CITIGO SPORTSkoda Club PeloponnhsouNoch keine Bewertungen
- Sca-Library Acquisition ProgramDokument9 SeitenSca-Library Acquisition ProgramCindy Basilio PinedaNoch keine Bewertungen
- Personal Particulars: Thanuja ParamanandanDokument4 SeitenPersonal Particulars: Thanuja ParamanandanThanujaNoch keine Bewertungen
- Hci RCHSD Capstone PresentationDokument2 SeitenHci RCHSD Capstone Presentationapi-583841034Noch keine Bewertungen
- The Architecture Journal 17 - Distributed ComputingDokument48 SeitenThe Architecture Journal 17 - Distributed ComputingMustan100% (17)
- Tech Mahindra Aptitude PaperDokument22 SeitenTech Mahindra Aptitude PaperAkash BhagatNoch keine Bewertungen
- Tps60403-q1 (Charge Pump) Signal CondDokument29 SeitenTps60403-q1 (Charge Pump) Signal CondCH Pavan KumarNoch keine Bewertungen
- ME302-Syllabus - ME-302 Mechanical Systems IIDokument2 SeitenME302-Syllabus - ME-302 Mechanical Systems IIد.محمد كسابNoch keine Bewertungen
- Siemens Hicom 300 Set T8 ManualDokument28 SeitenSiemens Hicom 300 Set T8 ManualFrank Sky WalkerNoch keine Bewertungen
- Immigrants and The Public LibraryDokument10 SeitenImmigrants and The Public Libraryapi-250093181Noch keine Bewertungen
- #14674 Difficulty: Moderate #35626 Difficulty: ModerateDokument4 Seiten#14674 Difficulty: Moderate #35626 Difficulty: ModerateLaszló KindNoch keine Bewertungen
- Research EditedDokument7 SeitenResearch Editedauko omondiNoch keine Bewertungen
- LTE Parameter - Ue State HandlingDokument39 SeitenLTE Parameter - Ue State HandlingSatria Wibowo100% (5)
- Inv 27113Dokument2 SeitenInv 27113joakim KiambaNoch keine Bewertungen
- How Many Clusters? Which Clustering Method? Answers Via Model-Based Cluster AnalysisDokument22 SeitenHow Many Clusters? Which Clustering Method? Answers Via Model-Based Cluster AnalysisFake nameNoch keine Bewertungen
- Front End Performance ChecklistDokument11 SeitenFront End Performance ChecklistKevinNoch keine Bewertungen
- The Use of Simulation in The Design of Milk-Run Intralogistics SystemsDokument6 SeitenThe Use of Simulation in The Design of Milk-Run Intralogistics SystemsSoufiane AbdellaouiNoch keine Bewertungen
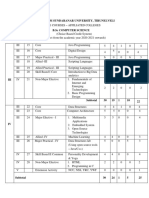
- B.SC Computer Science 2020-2021 SylabusDokument67 SeitenB.SC Computer Science 2020-2021 SylabusKrithika SKNoch keine Bewertungen
- Design and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating ConditionsDokument8 SeitenDesign and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating Conditionsrakeshee2007Noch keine Bewertungen
- Udl Classroom-Ryan CrumDokument5 SeitenUdl Classroom-Ryan Crumapi-663455706Noch keine Bewertungen
- Test Strategy Document: Version #: Date of IssueDokument6 SeitenTest Strategy Document: Version #: Date of IssuevenukomanapalliNoch keine Bewertungen
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDokument10 SeitenAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Noch keine Bewertungen
- B.Sc. Chemistry Honours-2022: 1 ListDokument4 SeitenB.Sc. Chemistry Honours-2022: 1 ListSrijaNoch keine Bewertungen
- (Discwizard) SW Installation Guide - R7-1Dokument22 Seiten(Discwizard) SW Installation Guide - R7-1perdoncinidNoch keine Bewertungen
- Diploma in Information Technology Technical SupportDokument3 SeitenDiploma in Information Technology Technical SupportAjay Bedi100% (1)