Das könnte Ihnen auch gefallen
- Wegemer2019IJLT BCIsandeducationDokument22 SeitenWegemer2019IJLT BCIsandeducationEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: WO2013164364 (A1) 2013-11-07Dokument1 SeiteEspacenet Bibliographic Data: WO2013164364 (A1) 2013-11-07Edval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: PL3100707 (T3) 2018-06-29: Apparatus For Locomotion TherapyDokument1 SeiteEspacenet Bibliographic Data: PL3100707 (T3) 2018-06-29: Apparatus For Locomotion TherapyEdval Rodrigues de ViveirosNoch keine Bewertungen
- HHS Public Access: Designing A Hands-On Brain Computer Interface Laboratory CourseDokument10 SeitenHHS Public Access: Designing A Hands-On Brain Computer Interface Laboratory CourseEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: CH704817 (A2) 2012-10-15Dokument2 SeitenEspacenet Bibliographic Data: CH704817 (A2) 2012-10-15Edval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: RU2687774 (C2) 2019-05-16: Walking Training DeviceDokument2 SeitenEspacenet Bibliographic Data: RU2687774 (C2) 2019-05-16: Walking Training DeviceEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: PL2730266 (T3) 2017-02-28: Gait Training ApparatusDokument2 SeitenEspacenet Bibliographic Data: PL2730266 (T3) 2017-02-28: Gait Training ApparatusEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: SI3035901 (T1) 2020-03-31: Hand Motion Exercising DeviceDokument2 SeitenEspacenet Bibliographic Data: SI3035901 (T1) 2020-03-31: Hand Motion Exercising DeviceEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: US2017112417 (A1) 2017-04-27Dokument1 SeiteEspacenet Bibliographic Data: US2017112417 (A1) 2017-04-27Edval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: TR201905947 (T4) 2019-05-21: Apparatus For Automated Walking TrainingDokument2 SeitenEspacenet Bibliographic Data: TR201905947 (T4) 2019-05-21: Apparatus For Automated Walking TrainingEdval Rodrigues de ViveirosNoch keine Bewertungen
- Illusory Movement Perception PDFDokument13 SeitenIllusory Movement Perception PDFEdval Rodrigues de ViveirosNoch keine Bewertungen
- Espacenet Bibliographic Data: PL3432996 (T3) 2020-08-24: Suspension Device For Balancing A WeightDokument2 SeitenEspacenet Bibliographic Data: PL3432996 (T3) 2020-08-24: Suspension Device For Balancing A WeightEdval Rodrigues de ViveirosNoch keine Bewertungen
- Mechatronic DesignDokument12 SeitenMechatronic DesignEdval Rodrigues de ViveirosNoch keine Bewertungen
- 10 1 1 89Dokument11 Seiten10 1 1 89singhnavneet56Noch keine Bewertungen
- Dieletric ElastomersDokument9 SeitenDieletric ElastomersEdval Rodrigues de ViveirosNoch keine Bewertungen
- EEG Signal Classification For Brain Computer Interface ApplicationsDokument72 SeitenEEG Signal Classification For Brain Computer Interface Applicationsiolandadumitrescu4365Noch keine Bewertungen
- The Clinostat EffectDokument3 SeitenThe Clinostat EffectEdval Rodrigues de ViveirosNoch keine Bewertungen
- These Emotiv EpocDokument61 SeitenThese Emotiv EpocEdval Rodrigues de ViveirosNoch keine Bewertungen
- Pneumatic Muscle02Dokument15 SeitenPneumatic Muscle02Edval Rodrigues de ViveirosNoch keine Bewertungen
- 6 - Multielectrode Recordings in The Somatosensory System - Methods For Neural Ensemble Recordings - NCBDokument22 Seiten6 - Multielectrode Recordings in The Somatosensory System - Methods For Neural Ensemble Recordings - NCBEdval Rodrigues de ViveirosNoch keine Bewertungen
- Baylissandballard00-Virtual Reality TestbedDokument3 SeitenBaylissandballard00-Virtual Reality TestbedEdval Rodrigues de ViveirosNoch keine Bewertungen
- Cross Modal Plsticity of Tactile PerceptionDokument12 SeitenCross Modal Plsticity of Tactile PerceptionEdval Rodrigues de ViveirosNoch keine Bewertungen
- Cross-Modal Plasticity For SensoryDokument8 SeitenCross-Modal Plasticity For SensoryEdval Rodrigues de ViveirosNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Air Conditioning MIKEHOLTDokument1 SeiteAir Conditioning MIKEHOLTWilliamNoch keine Bewertungen
- Xii Physics-Investigatory Project TransformerDokument16 SeitenXii Physics-Investigatory Project TransformerManav SundraniNoch keine Bewertungen
- Z 0409 MFDokument6 SeitenZ 0409 MFYadira RodriguezNoch keine Bewertungen
- PHY p160Dokument17 SeitenPHY p160Harshit KhardiaNoch keine Bewertungen
- Digital Frequency MeterDokument3 SeitenDigital Frequency MeterShanzay KhanNoch keine Bewertungen
- A1d1-X Csa - CeDokument3 SeitenA1d1-X Csa - Ceharshithkumar20Noch keine Bewertungen
- E Lau Error CodesDokument94 SeitenE Lau Error CodesMarcos Jorje HenriquezNoch keine Bewertungen
- EDC Fermi LevelDokument10 SeitenEDC Fermi LevelImran BashaNoch keine Bewertungen
- Dokumen - Pub Emerging Power Converters For Renewable Energy and Electric Vehicles Modeling Design and Control 9780367528034 9780367528140 9781003058472Dokument419 SeitenDokumen - Pub Emerging Power Converters For Renewable Energy and Electric Vehicles Modeling Design and Control 9780367528034 9780367528140 9781003058472juanNoch keine Bewertungen
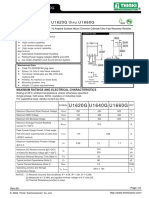
- Datasheet PDFDokument2 SeitenDatasheet PDFEka Hikmah PratiwiNoch keine Bewertungen
- Pioneer A25fu20 53f 10 WooferDokument25 SeitenPioneer A25fu20 53f 10 WooferblackestsheepNoch keine Bewertungen
- LG HB965DF PDFDokument151 SeitenLG HB965DF PDFboroda2410100% (1)
- Silabus PARDokument6 SeitenSilabus PARAmanda Gamayani PendiamNoch keine Bewertungen
- Function: Electrical, Electronics and Control Engineering at Operational LevelDokument3 SeitenFunction: Electrical, Electronics and Control Engineering at Operational LevelRamesh BalasubramaniNoch keine Bewertungen
- Review On BjtsDokument24 SeitenReview On Bjtsmichaeledem_royalNoch keine Bewertungen
- Science-9 Q4 W7 D2Dokument5 SeitenScience-9 Q4 W7 D2Johnrey PovadoraNoch keine Bewertungen
- 18sub v1Dokument21 Seiten18sub v1Andrei ZamfirNoch keine Bewertungen
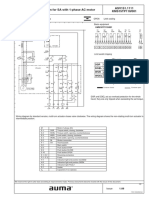
- Proposed Wiring Diagram For SA With 1-Phase AC Motor ASV151.1111 KMS15TP110/001Dokument2 SeitenProposed Wiring Diagram For SA With 1-Phase AC Motor ASV151.1111 KMS15TP110/001cosmin1975Noch keine Bewertungen
- Datasheet For Cable: 1 Pair Overall Shielded Armoured Cable, Type F (Single Pair Cable Shall Have Only Overall Shielding)Dokument4 SeitenDatasheet For Cable: 1 Pair Overall Shielded Armoured Cable, Type F (Single Pair Cable Shall Have Only Overall Shielding)AnamulKabirNoch keine Bewertungen
- H.V Update (May)Dokument9 SeitenH.V Update (May)Kyaw sithu thantNoch keine Bewertungen
- Wiw3362 W 503 PDFDokument1 SeiteWiw3362 W 503 PDFabathunNoch keine Bewertungen
- "GroomLake'Colonel'Reveals'All" MAGVID (Annotated)Dokument19 Seiten"GroomLake'Colonel'Reveals'All" MAGVID (Annotated)mathias455Noch keine Bewertungen
- SH Na 3181-FDokument123 SeitenSH Na 3181-FnagamabhishekNoch keine Bewertungen
- Profibus Troubleshooting & MaintenanceDokument92 SeitenProfibus Troubleshooting & Maintenancemsohaibkhalid100% (3)
- Icom IC-2710H Service ManualDokument48 SeitenIcom IC-2710H Service ManualclaudioNoch keine Bewertungen
- Elektrotechnische Werke Fritz Driescher & Söhne GMBHDokument4 SeitenElektrotechnische Werke Fritz Driescher & Söhne GMBHKrishnakumar IesNoch keine Bewertungen
- Catalogue Hitachi-01-05-2016 PDFDokument8 SeitenCatalogue Hitachi-01-05-2016 PDFBach HuynhNoch keine Bewertungen
- PDU8000 UPS Modular Power Distribution Cabinet Health Check Guide V1.0Dokument2 SeitenPDU8000 UPS Modular Power Distribution Cabinet Health Check Guide V1.0koechkNoch keine Bewertungen
- HSPICE® User Guide: Advanced Analog Simulation and Analysis: Version N-2017.12, December 2017Dokument360 SeitenHSPICE® User Guide: Advanced Analog Simulation and Analysis: Version N-2017.12, December 2017Văn CôngNoch keine Bewertungen