Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
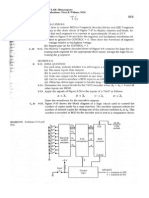
- EE311 / EE335 Digital System Design / LAB: Mini Projects: T6. Digital Systems Principles and Applications-Tocci & Widmer, 8 EdDokument2 SeitenEE311 / EE335 Digital System Design / LAB: Mini Projects: T6. Digital Systems Principles and Applications-Tocci & Widmer, 8 Edaditya01775Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- AM200 - Mechanics of MaterialsDokument4 SeitenAM200 - Mechanics of Materialsaditya01775Noch keine Bewertungen
- Ee 5sem BtechDokument23 SeitenEe 5sem Btechaditya01775Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Simulink TutorialDokument17 SeitenSimulink TutorialyuvionfireNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Datasheet Arduino Duemilanove ATMEG328Dokument448 SeitenDatasheet Arduino Duemilanove ATMEG328Caio LoksNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Geometric SeriesDokument8 SeitenGeometric Seriesaditya01775Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Flusser-The FactoryDokument2 SeitenFlusser-The FactoryAlberto SerranoNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Asme Code Sec Ix Ma Appe 2004Dokument3 SeitenAsme Code Sec Ix Ma Appe 2004Guillermo CamachoNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Water Filling MachineDokument15 SeitenWater Filling Machinepallab D RozarioNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Joby Aviation - Analyst Day PresentationDokument100 SeitenJoby Aviation - Analyst Day PresentationIan TanNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Times Square C2C Cardigan: Finished Measurements NotionsDokument8 SeitenTimes Square C2C Cardigan: Finished Measurements Notionsdiana.alyNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Practical Reference Guide ForDokument4 SeitenThe Practical Reference Guide Forelias667Noch keine Bewertungen
- Valdez, Shenny RoseDokument3 SeitenValdez, Shenny Roseyeng botzNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Danika Cristoal 18aDokument4 SeitenDanika Cristoal 18aapi-462148990Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- OPTCL-Fin-Bhw-12Dokument51 SeitenOPTCL-Fin-Bhw-12Bimal Kumar DashNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Tokyo Guidelines 2018Dokument115 SeitenTokyo Guidelines 2018Alik Razi100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- DP November 2017 Examination Schedule en PDFDokument4 SeitenDP November 2017 Examination Schedule en PDFSuperlucidoNoch keine Bewertungen
- Eco JetDokument15 SeitenEco JetJustin CoyNoch keine Bewertungen
- Phrasal Verbs Related To HealthDokument2 SeitenPhrasal Verbs Related To HealthKnuckles El Naco Narco LechugueroNoch keine Bewertungen
- Aquaculture Scoop May IssueDokument20 SeitenAquaculture Scoop May IssueAquaculture ScoopNoch keine Bewertungen
- Essential Calculus Skills Practice Workbook With Full SolutionsDokument528 SeitenEssential Calculus Skills Practice Workbook With Full SolutionsGerardo Navarro Sánchez94% (65)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- WeeklyDokument8 SeitenWeeklyivaldeztNoch keine Bewertungen
- Skincare Routine Order Cheat SheetDokument10 SeitenSkincare Routine Order Cheat SheetYel Salenga100% (3)
- AppearancesDokument4 SeitenAppearancesReme TrujilloNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Rachel Joyce - A Snow Garden and Other Stories PDFDokument118 SeitenRachel Joyce - A Snow Garden and Other Stories PDFИгорь ЯковлевNoch keine Bewertungen
- 15 Benefits of CyclingDokument8 Seiten15 Benefits of CyclingJoycs PintoNoch keine Bewertungen
- Beastlikebalsam - Muscle BuildingDokument10 SeitenBeastlikebalsam - Muscle BuildingBalsam LaaroussiNoch keine Bewertungen
- Adaptive Reuse Architecture Documentation and Analysis 2168 9717 1000172Dokument9 SeitenAdaptive Reuse Architecture Documentation and Analysis 2168 9717 1000172Komal HundiaNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- 8-General Rules For Erection ProcedureDokument4 Seiten8-General Rules For Erection ProcedurePrijin UnnunnyNoch keine Bewertungen
- Frye LGD As A Function of The Default Rate 091013 PDFDokument13 SeitenFrye LGD As A Function of The Default Rate 091013 PDFSushant SinghNoch keine Bewertungen
- English Class Vii PDFDokument101 SeitenEnglish Class Vii PDFpannapurohitNoch keine Bewertungen
- Armadio Presentation-2019Dokument45 SeitenArmadio Presentation-2019Subhash Singh TomarNoch keine Bewertungen
- Dharmakirti39s Commentary On ChakrasamvaraDokument15 SeitenDharmakirti39s Commentary On ChakrasamvaraThiago AlbuquerqueNoch keine Bewertungen
- Colour FastnessDokument37 SeitenColour FastnessSivakumar K100% (1)
- 08 - 2061 USTR 2222a (1) Supor EKVDokument24 Seiten08 - 2061 USTR 2222a (1) Supor EKVHassan Houdoud0% (1)
- Electronic Ticket Receipt, January 27 For MS NESHA SIVA SHANMUGAMDokument2 SeitenElectronic Ticket Receipt, January 27 For MS NESHA SIVA SHANMUGAMNesha Siva Shanmugam ShavannahNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)