Das könnte Ihnen auch gefallen
- Problem StatementDokument3 SeitenProblem Statementheyyo276Noch keine Bewertungen
- Numec Assingment 4Dokument3 SeitenNumec Assingment 4heyyo276Noch keine Bewertungen
- 1-MEM661 Lab Report Format, Rubric & MarksDokument3 Seiten1-MEM661 Lab Report Format, Rubric & Marksheyyo276Noch keine Bewertungen
- Master Schedule For Final Year ProjectDokument2 SeitenMaster Schedule For Final Year Projectheyyo276Noch keine Bewertungen
- EMD6Dokument2 SeitenEMD6heyyo276Noch keine Bewertungen
- 7.0 Results and Data Analysis A) SmawDokument2 Seiten7.0 Results and Data Analysis A) Smawheyyo276Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Pert ChartDokument20 SeitenPert Chartshweta bhilawadiNoch keine Bewertungen
- Thyristor Voltage Controller - 100494PDokument15 SeitenThyristor Voltage Controller - 100494PNishanga SandamalNoch keine Bewertungen
- DARCY CV - UpdatedDokument3 SeitenDARCY CV - UpdatedRodel CandelarioNoch keine Bewertungen
- PassThru API 1Dokument83 SeitenPassThru API 1andaposa9Noch keine Bewertungen
- Chembiooffice Version 14.0: Hardware & Software GuideDokument4 SeitenChembiooffice Version 14.0: Hardware & Software GuideSamuel BlakeNoch keine Bewertungen
- Federal Communications Commission 90.35: 90.33 General EligibilityDokument40 SeitenFederal Communications Commission 90.35: 90.33 General EligibilityAl_CodaNoch keine Bewertungen
- Type 2625 and 2625NS Volume BoostersDokument4 SeitenType 2625 and 2625NS Volume Boostershamz786Noch keine Bewertungen
- Science Class 6 Chapter 12 Ques AnswerDokument2 SeitenScience Class 6 Chapter 12 Ques Answerwonders of danceNoch keine Bewertungen
- 6WG1 TanıtımDokument17 Seiten6WG1 TanıtımHalil KaraNoch keine Bewertungen
- BAJA RULES 2020 Rev B 2020-01-26Dokument129 SeitenBAJA RULES 2020 Rev B 2020-01-26baja100% (2)
- pdf24 - Converted 4Dokument18 Seitenpdf24 - Converted 4Sai VamshiNoch keine Bewertungen
- Parallel Port Interfacing Using Assembly LanguageDokument21 SeitenParallel Port Interfacing Using Assembly Languageamon_abilar100% (1)
- Moving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANADokument97 SeitenMoving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANASueli100% (1)
- Ms RDPBCGRDokument421 SeitenMs RDPBCGRDenis UvarkinNoch keine Bewertungen
- UKOOA Telecoms GuidelinesDokument35 SeitenUKOOA Telecoms GuidelinesmaarutzNoch keine Bewertungen
- Key CCNADokument19 SeitenKey CCNAnguyen hong sonNoch keine Bewertungen
- ICMR - Reproducible AI in Medicine and HealthDokument9 SeitenICMR - Reproducible AI in Medicine and Healthvignesh16vlsiNoch keine Bewertungen
- Force 10 BBQDokument12 SeitenForce 10 BBQTom KakanowskiNoch keine Bewertungen
- Recommended Practices For CNG Fueling Station Design, Construction and OperationDokument35 SeitenRecommended Practices For CNG Fueling Station Design, Construction and OperationStefan GhNoch keine Bewertungen
- Case Study NasariaDokument20 SeitenCase Study NasariaHarsh SinhaNoch keine Bewertungen
- Cisco IOS For DummiesDokument29 SeitenCisco IOS For DummiesGary LuNoch keine Bewertungen
- Computer Science Project On Snake and Ladder GameDokument17 SeitenComputer Science Project On Snake and Ladder GameAdarsh GodiyalNoch keine Bewertungen
- SoooDokument3 SeitenSoooDonny Dwi OktaviantoNoch keine Bewertungen
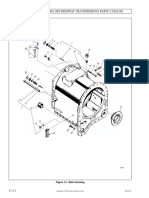
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDokument3 SeitenAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaNoch keine Bewertungen
- TechCorner 05 - Productivity3000 Ramp, Ramp Generator, Find Min and MaxDokument4 SeitenTechCorner 05 - Productivity3000 Ramp, Ramp Generator, Find Min and MaxQuantumAutomationNoch keine Bewertungen
- InstallDokument6 SeitenInstallDebangshu KumarNoch keine Bewertungen
- Came Ozak Pedestrian CatalogDokument116 SeitenCame Ozak Pedestrian Cataloghusamzaki7Noch keine Bewertungen
- ScrewbnDokument15 SeitenScrewbnDeepika-deepix AroraNoch keine Bewertungen
- New CVDokument3 SeitenNew CVDhiraj ShindeNoch keine Bewertungen
- Extra PolarDokument4 SeitenExtra Polarraimari brachoNoch keine Bewertungen