Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Softing DTS Monaco Data SheetDokument4 SeitenSofting DTS Monaco Data SheetStephensonNoch keine Bewertungen
- TCUDokument9 SeitenTCUStephensonNoch keine Bewertungen
- Diesel Engines For Vehicles D2066 D2676Dokument6 SeitenDiesel Engines For Vehicles D2066 D2676Branislava Savic63% (16)
- CAESAR HW Implementers Guide v1.1Dokument42 SeitenCAESAR HW Implementers Guide v1.1StephensonNoch keine Bewertungen
- Commercial Vehicle Regulations 2018Dokument15 SeitenCommercial Vehicle Regulations 2018StephensonNoch keine Bewertungen
- Double Coin Dual Spacing InfoSheetDokument2 SeitenDouble Coin Dual Spacing InfoSheetStephensonNoch keine Bewertungen
- S60me C8 - 2 Gi PDFDokument413 SeitenS60me C8 - 2 Gi PDFStephenson100% (2)
- Iecex Ul 14 0012x Issue 0Dokument3 SeitenIecex Ul 14 0012x Issue 0StephensonNoch keine Bewertungen
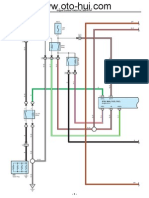
- Wiring Diagram ECU 2KD-FTVDokument13 SeitenWiring Diagram ECU 2KD-FTVDam Nguyen88% (96)
- VVDI Prog Programmer V4.5.8 User ManualDokument52 SeitenVVDI Prog Programmer V4.5.8 User Manualobd365Noch keine Bewertungen
- Sdconnect Multiplerxer Hand BookDokument35 SeitenSdconnect Multiplerxer Hand BookStephenson100% (3)
- SD Connect MultiplexerDokument7 SeitenSD Connect MultiplexerStephenson100% (2)
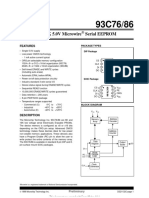
- 8K/16K 5.0V Microwire Serial EEPROM: FeaturesDokument12 Seiten8K/16K 5.0V Microwire Serial EEPROM: FeaturesStephensonNoch keine Bewertungen
- High Pressure System PumpDokument2 SeitenHigh Pressure System PumpStephensonNoch keine Bewertungen
- TSL Pro Install T InfoDokument12 SeitenTSL Pro Install T InfoStephensonNoch keine Bewertungen
- CANoe - Diva FactSheet enDokument2 SeitenCANoe - Diva FactSheet enStephensonNoch keine Bewertungen
- Xentry Kit SDDokument7 SeitenXentry Kit SDStephenson100% (1)
- Wirelesss TelematicsDokument2 SeitenWirelesss TelematicsStephensonNoch keine Bewertungen
- ASAM MCD (Association For Standardisation of Automation and Measuring Systems, MCD)Dokument30 SeitenASAM MCD (Association For Standardisation of Automation and Measuring Systems, MCD)StephensonNoch keine Bewertungen
- DTS Monaco Info PDFDokument4 SeitenDTS Monaco Info PDFStephensonNoch keine Bewertungen
- Mercedes Axor Fuel System Repair ManualDokument20 SeitenMercedes Axor Fuel System Repair ManualStephenson75% (4)
- BMW E46 Traction Control SystemDokument47 SeitenBMW E46 Traction Control SystemStephensonNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- HUAWEI HiSecEngine USG6500E Series Firewalls (Desktop) DatasheetDokument7 SeitenHUAWEI HiSecEngine USG6500E Series Firewalls (Desktop) DatasheetpeterNoch keine Bewertungen
- Actix Spotlight Desktop User GuideDokument276 SeitenActix Spotlight Desktop User GuidetelwindNoch keine Bewertungen
- TBC PentestDokument9 SeitenTBC PentestJam Tangan BrandedNoch keine Bewertungen
- Ref 1005 PDFDokument503 SeitenRef 1005 PDFHarik Rafiry100% (2)
- Wolverine ManualDokument74 SeitenWolverine ManualHariman Abd RahmanNoch keine Bewertungen
- Sae J1939Dokument28 SeitenSae J1939dsp4usNoch keine Bewertungen
- Republic Act No. 8792 Electronic Commerce Act OF 2000Dokument17 SeitenRepublic Act No. 8792 Electronic Commerce Act OF 2000John Paul SorianoNoch keine Bewertungen
- Network and IT Guidance TechnicalDokument138 SeitenNetwork and IT Guidance TechnicalRaul OliveiraNoch keine Bewertungen
- 3-Tier Architecture: Step by Step ExercisesDokument71 Seiten3-Tier Architecture: Step by Step ExercisesvivekNoch keine Bewertungen
- Dvc-System ReleaseDokument44 SeitenDvc-System Releasemanjunath shekarNoch keine Bewertungen
- Border-Security-Using-Wireless-Integrated-Network-Sensor-Seminar PresentationDokument18 SeitenBorder-Security-Using-Wireless-Integrated-Network-Sensor-Seminar Presentationಕೆ ವಿಶ್ವನಾಥ್Noch keine Bewertungen
- RTX64RuntimeInstallGuide PDFDokument48 SeitenRTX64RuntimeInstallGuide PDFDavid JacquesNoch keine Bewertungen
- Computer Science MCQs - NTS, FPSC Test Questions Preparation - EbookDokument3 SeitenComputer Science MCQs - NTS, FPSC Test Questions Preparation - EbookFarhan AsifNoch keine Bewertungen
- Manual - Label Printer - Windows - Driver - English - V5.07Dokument32 SeitenManual - Label Printer - Windows - Driver - English - V5.07robotronicaNoch keine Bewertungen
- (DevCourseWeb - Com) CCISOCertifiedChiefInformationSecurityOfficerAll in OneExamGuide SteveBennettDokument590 Seiten(DevCourseWeb - Com) CCISOCertifiedChiefInformationSecurityOfficerAll in OneExamGuide SteveBennettLinuxPower100% (2)
- GPRSDokument11 SeitenGPRSZahra ZeeNoch keine Bewertungen
- Ebook PDF Technology in Action Complete Global Edition 15th Edition PDFDokument41 SeitenEbook PDF Technology in Action Complete Global Edition 15th Edition PDFluis.fowler187100% (38)
- B UCSM CLI Configuration Guide 2 1Dokument738 SeitenB UCSM CLI Configuration Guide 2 1cruxv05Noch keine Bewertungen
- Network and InternetDokument57 SeitenNetwork and InternetNIYONKURU Aime Sincere100% (1)
- 01-3 - Routing BasicsDokument38 Seiten01-3 - Routing BasicsEmildo LahudNoch keine Bewertungen
- H3454 EMC Avamar Datastore - Specification SheetDokument3 SeitenH3454 EMC Avamar Datastore - Specification SheetayputoNoch keine Bewertungen
- Siemens SIMATIC Step 7 ProgrammerDokument72 SeitenSiemens SIMATIC Step 7 ProgrammerNelson RodriguesNoch keine Bewertungen
- Block 3 MLI 101 Unit 12Dokument29 SeitenBlock 3 MLI 101 Unit 12ravinderreddynNoch keine Bewertungen
- Cisco Subscriber Edge Services Manager Web Portals Guide: SESM 3.3Dokument54 SeitenCisco Subscriber Edge Services Manager Web Portals Guide: SESM 3.3CleoNoch keine Bewertungen
- CH 01Dokument26 SeitenCH 01An LcNoch keine Bewertungen
- 9D58203 Advanced Computer NetworksDokument1 Seite9D58203 Advanced Computer NetworkssubbuNoch keine Bewertungen
- Applied Sciences: Photonic Integrated Circuits For NGPON2 ONU Transceivers (Invited)Dokument19 SeitenApplied Sciences: Photonic Integrated Circuits For NGPON2 ONU Transceivers (Invited)RomanNoch keine Bewertungen
- Coc 2Dokument3 SeitenCoc 2Ya NaNoch keine Bewertungen
- Sybase IQ 16.0 InstallationDokument64 SeitenSybase IQ 16.0 InstallationJorge Guillermo SchmidtNoch keine Bewertungen
- Double Take5.3Dokument628 SeitenDouble Take5.3kamaljoshiNoch keine Bewertungen