Das könnte Ihnen auch gefallen
- RSCAD Software OverviewDokument2 SeitenRSCAD Software Overviewkra_amNoch keine Bewertungen
- (Brief Report) : Abaqus Fe-SafeDokument3 Seiten(Brief Report) : Abaqus Fe-SafeDigantNoch keine Bewertungen
- Psim FliehdrdfgdfhgDokument2 SeitenPsim FliehdrdfgdfhgDany ApablazaNoch keine Bewertungen
- PSIMDokument4 SeitenPSIMKavin SengodanNoch keine Bewertungen
- PSIM Brochure PressDokument4 SeitenPSIM Brochure PressVijay GargNoch keine Bewertungen
- 6SE70 MC Catalog DA65.11 2004Dokument241 Seiten6SE70 MC Catalog DA65.11 2004chnanduNoch keine Bewertungen
- Samcef RotorDokument4 SeitenSamcef RotorChihiya Fitria NurhayatiNoch keine Bewertungen
- SAMCEF Gateway: Driving SAMCEF Simulations From CATIA V5Dokument4 SeitenSAMCEF Gateway: Driving SAMCEF Simulations From CATIA V5Anonymous KdnOsd9Noch keine Bewertungen
- FEMFAT Flyer e WebDokument8 SeitenFEMFAT Flyer e Webfkaram1965Noch keine Bewertungen
- 05 SIMADYN-D eDokument36 Seiten05 SIMADYN-D eErik AcostaNoch keine Bewertungen
- SAMCEF For Machine ToolsDokument2 SeitenSAMCEF For Machine Toolsmurali036Noch keine Bewertungen
- PSCAD Run Time Controls and Interactive Data Analysis PlotsDokument4 SeitenPSCAD Run Time Controls and Interactive Data Analysis Plotsjan.sakowicz9777Noch keine Bewertungen
- Broch Samcef Field AnDokument6 SeitenBroch Samcef Field AnAnonymous KdnOsd9Noch keine Bewertungen
- PSIM Brochure PDFDokument20 SeitenPSIM Brochure PDFIzzuddin NashirNoch keine Bewertungen
- Technology Modul Cam Profile: Drive Center International ContDokument8 SeitenTechnology Modul Cam Profile: Drive Center International ContRich_78Noch keine Bewertungen
- Ixxat Sae j1939Dokument3 SeitenIxxat Sae j1939Dinesh KumarNoch keine Bewertungen
- Coupler Curve System PDFDokument11 SeitenCoupler Curve System PDFshahNoch keine Bewertungen
- Esign Hapter Pdates: A, M - S RF S DT T CDokument5 SeitenEsign Hapter Pdates: A, M - S RF S DT T Cochie_loverNoch keine Bewertungen
- Chip TuningDokument20 SeitenChip TuningNisvet Suljic100% (10)
- Module PTVVissimDokument3 SeitenModule PTVVissimAnisah PratiwiNoch keine Bewertungen
- Tanner EDA Simulation DetailedDokument125 SeitenTanner EDA Simulation DetailedJayaram KumarNoch keine Bewertungen
- AutT MotionDokument3 SeitenAutT MotionSambath JoyNoch keine Bewertungen
- Broch Samceflinear AnDokument4 SeitenBroch Samceflinear AnAnonymous KdnOsd9Noch keine Bewertungen
- TFT Design Flow 08Dokument8 SeitenTFT Design Flow 08Nikhil PuriNoch keine Bewertungen
- SyR-e User's Manual for Synchronous Reluctance Machine DesignDokument18 SeitenSyR-e User's Manual for Synchronous Reluctance Machine DesignJhonatan AlexisNoch keine Bewertungen
- Concept To Reality... Faster: Powerful Software For The Design of Rotating Electric MachinesDokument4 SeitenConcept To Reality... Faster: Powerful Software For The Design of Rotating Electric Machines4iuo6a55pkjaclob0jawNoch keine Bewertungen
- Integrating Simulation ToolsDokument5 SeitenIntegrating Simulation ToolsjdebnathNoch keine Bewertungen
- SCORG Pumplinx Setup V5.1Dokument22 SeitenSCORG Pumplinx Setup V5.1kamlzNoch keine Bewertungen
- SIMPACK Interfaces MATLAB/SimulinkDokument2 SeitenSIMPACK Interfaces MATLAB/SimulinkjithukkNoch keine Bewertungen
- Eurostag Version 4 5 Leaflet v3Dokument2 SeitenEurostag Version 4 5 Leaflet v3esmani84Noch keine Bewertungen
- Report PDFDokument11 SeitenReport PDFshahNoch keine Bewertungen
- Power System Simulation Lab Software-Eurostag-New-Release-5-1 PDFDokument2 SeitenPower System Simulation Lab Software-Eurostag-New-Release-5-1 PDFShiv Kant Verma HKNoch keine Bewertungen
- Printed Circuit Board Simulation A Look at Next Generation Simulation Tools and Their Correlation To Laboratory MeasurementsDokument28 SeitenPrinted Circuit Board Simulation A Look at Next Generation Simulation Tools and Their Correlation To Laboratory MeasurementsCbl ChabulNoch keine Bewertungen
- Brochure Automotive enDokument24 SeitenBrochure Automotive enpandiyarajmechNoch keine Bewertungen
- 2 AutosarDokument9 Seiten2 AutosarRajkiran RavulaNoch keine Bewertungen
- Building Custom FIR Filters Using System GeneratorDokument4 SeitenBuilding Custom FIR Filters Using System Generatordwivedi89Noch keine Bewertungen
- MSC PATRAN V2008R1, DYTRAN, EASY5 V2008.R1, MSC MD ADAMS.R3, MSC.SINDA.V2008.R1 CAE softwareDokument6 SeitenMSC PATRAN V2008R1, DYTRAN, EASY5 V2008.R1, MSC MD ADAMS.R3, MSC.SINDA.V2008.R1 CAE softwareKumaran KumarNoch keine Bewertungen
- Designing FlexRay-based Automotive Architecture - A Holistic OEM ApproachDokument4 SeitenDesigning FlexRay-based Automotive Architecture - A Holistic OEM ApproachErdinç AVCINoch keine Bewertungen
- STAR-CCM v7 BrochureDokument6 SeitenSTAR-CCM v7 BrochureAntonio MartinsNoch keine Bewertungen
- Tick The Circle Which Is Interested: Cradle CFDDokument6 SeitenTick The Circle Which Is Interested: Cradle CFDMithun RajuNoch keine Bewertungen
- Readme PDFDokument3 SeitenReadme PDFAlessandro SoliNoch keine Bewertungen
- Configurable HMI System for Power Automation ControlDokument6 SeitenConfigurable HMI System for Power Automation ControlPradiptaSahaNoch keine Bewertungen
- Whats New in Electronics DesktopDokument7 SeitenWhats New in Electronics DesktopSmenn SmennNoch keine Bewertungen
- Real Time Simulation of Complex Automatic Transmission ModelsDokument20 SeitenReal Time Simulation of Complex Automatic Transmission ModelsSudev NairNoch keine Bewertungen
- T300Dokument56 SeitenT300eng_karamazabNoch keine Bewertungen
- Test & Data Management Software: The Integrated Testing SolutionDokument12 SeitenTest & Data Management Software: The Integrated Testing SolutionWongSemarangNoch keine Bewertungen
- XCP ReferenceBook V1.0 ENDokument113 SeitenXCP ReferenceBook V1.0 ENbriceagcosminNoch keine Bewertungen
- Timeline and Development ManagerDokument2 SeitenTimeline and Development ManagerkhoshnamaNoch keine Bewertungen
- Sicam PASDokument16 SeitenSicam PASRami El Naqa100% (1)
- Power System Analysis ToolboxDokument29 SeitenPower System Analysis ToolboxCésar Enrique Arroyo Marin100% (1)
- Power System Analysis ToolboxDokument29 SeitenPower System Analysis ToolboxRamaprasad PandaNoch keine Bewertungen
- Basicsofsap2000 160501061643Dokument6 SeitenBasicsofsap2000 160501061643Sajid HanifNoch keine Bewertungen
- MADO - Software Package For High Order Multidisciplinary Aircraft Design and OptimizationDokument10 SeitenMADO - Software Package For High Order Multidisciplinary Aircraft Design and OptimizationmegustalazorraNoch keine Bewertungen
- 2D Product Sheet 3 SimplorerDokument4 Seiten2D Product Sheet 3 Simplorerluis900000Noch keine Bewertungen
- Master-Slave DSP Board for Digital Control SystemsDokument5 SeitenMaster-Slave DSP Board for Digital Control Systemsfurious143Noch keine Bewertungen
- Allegro AMS SimulatorDokument5 SeitenAllegro AMS SimulatorrbrajatbaliNoch keine Bewertungen
- Whats New in Electronics DesktopDokument7 SeitenWhats New in Electronics Desktopgabriel davilaNoch keine Bewertungen
- Advanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesVon EverandAdvanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesNoch keine Bewertungen
- TIME SERIES FORECASTING. ARIMAX, ARCH AND GARCH MODELS FOR UNIVARIATE TIME SERIES ANALYSIS. Examples with MatlabVon EverandTIME SERIES FORECASTING. ARIMAX, ARCH AND GARCH MODELS FOR UNIVARIATE TIME SERIES ANALYSIS. Examples with MatlabNoch keine Bewertungen
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusVon EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNoch keine Bewertungen
- P T T E V S: Ower Rain Ractive Ffort and Ehicle PeedDokument1 SeiteP T T E V S: Ower Rain Ractive Ffort and Ehicle PeedjithukkNoch keine Bewertungen
- EEN 112 SYllabusDokument2 SeitenEEN 112 SYllabusjithukkNoch keine Bewertungen
- EE 101 Tutorial Sheet SolutionsDokument3 SeitenEE 101 Tutorial Sheet SolutionsjithukkNoch keine Bewertungen
- Wind DynamicDokument5 SeitenWind DynamicjithukkNoch keine Bewertungen
- Big Bang Theory: From Theology to ScienceDokument3 SeitenBig Bang Theory: From Theology to SciencejithukkNoch keine Bewertungen
- Seminar Attendance RecordDokument4 SeitenSeminar Attendance RecordjithukkNoch keine Bewertungen
- Topic: Aim: To Understand The Electrical Power Conditioning Process and The PowerDokument2 SeitenTopic: Aim: To Understand The Electrical Power Conditioning Process and The PowerjithukkNoch keine Bewertungen
- EE 101 Tutorial Sheet SolutionsDokument3 SeitenEE 101 Tutorial Sheet SolutionsjithukkNoch keine Bewertungen
- TemplateDokument2 SeitenTemplatejithukkNoch keine Bewertungen
- As The Size of Wind Turbines IncreasesDokument1 SeiteAs The Size of Wind Turbines IncreasesjithukkNoch keine Bewertungen
- 00136258Dokument7 Seiten00136258jithukkNoch keine Bewertungen
- Topic: Aim: To Understand The Electrical Power Conditioning Process and The PowerDokument1 SeiteTopic: Aim: To Understand The Electrical Power Conditioning Process and The PowerjithukkNoch keine Bewertungen
- Part-1 Teaching Philosophy /rationaleDokument3 SeitenPart-1 Teaching Philosophy /rationalejithukkNoch keine Bewertungen
- SIMPACK Interfaces MATLAB/SimulinkDokument2 SeitenSIMPACK Interfaces MATLAB/SimulinkjithukkNoch keine Bewertungen
- Big Bang Theory: From Theology to ScienceDokument3 SeitenBig Bang Theory: From Theology to SciencejithukkNoch keine Bewertungen
- Life Is A Tail Told by An IdiotDokument1 SeiteLife Is A Tail Told by An IdiotjithukkNoch keine Bewertungen
- Big Bang Theory: From Theology to ScienceDokument3 SeitenBig Bang Theory: From Theology to SciencejithukkNoch keine Bewertungen
- EE-540 Advanced Power ElectronicsDokument2 SeitenEE-540 Advanced Power ElectronicsjithukkNoch keine Bewertungen
- EE6501 POWER Electronic ConvertersDokument1 SeiteEE6501 POWER Electronic ConvertersjithukkNoch keine Bewertungen
- New Switching SchemesDokument8 SeitenNew Switching SchemesjithukkNoch keine Bewertungen
- ACE Online EE GATE Exam ReviewDokument16 SeitenACE Online EE GATE Exam ReviewcallmeduguNoch keine Bewertungen
- 06606107Dokument6 Seiten06606107jithukkNoch keine Bewertungen
- Ielts 2013Dokument8 SeitenIelts 2013SuperSubbu2010Noch keine Bewertungen
- IPE 401-Drive SystemDokument16 SeitenIPE 401-Drive SystemElmerNoch keine Bewertungen
- 1.0 Geo-Pilot 7600-9600 TheoryDokument107 Seiten1.0 Geo-Pilot 7600-9600 TheoryA Angiie Silva80% (5)
- Genie GTH844Dokument326 SeitenGenie GTH844HOMERO NOGUEDANoch keine Bewertungen
- Tiguan OverviewDokument44 SeitenTiguan OverviewBadoiu LiviuNoch keine Bewertungen
- Twin Disc Arneson Surface Drives Performance & BenefitsDokument12 SeitenTwin Disc Arneson Surface Drives Performance & BenefitsWoodsy12Noch keine Bewertungen
- Rear Axle Drive and Shaft PresentationDokument47 SeitenRear Axle Drive and Shaft PresentationmharitmsNoch keine Bewertungen
- Workshop Manual Transmission S118, S160G, ZA142Dokument140 SeitenWorkshop Manual Transmission S118, S160G, ZA142Heru Setyana50% (2)
- MID 130 Volvo Gear Box Fault CodesDokument9 SeitenMID 130 Volvo Gear Box Fault CodesMechanical Engg86% (7)
- Catalogo Refacciones ABDickDokument201 SeitenCatalogo Refacciones ABDickAlejandra Muñoz HernandezNoch keine Bewertungen
- Ehv 01 - 5Dokument35 SeitenEhv 01 - 5SARAVANAKRISHNAN VNoch keine Bewertungen
- Rear AxleDokument108 SeitenRear AxleGreg HannaNoch keine Bewertungen
- Chapter 1 (Introduction To Servicing Heavy-Duty Trucks) 1Dokument16 SeitenChapter 1 (Introduction To Servicing Heavy-Duty Trucks) 1ZIBA KHADIBINoch keine Bewertungen
- A4VSO Replacement Pumps & PartsDokument4 SeitenA4VSO Replacement Pumps & PartsLabtecNoch keine Bewertungen
- GAZelle Sobol 4x4 LCV 296x180 EngDokument21 SeitenGAZelle Sobol 4x4 LCV 296x180 Engduncan chiriNoch keine Bewertungen
- Manual Transmission / Transaxle (R151F, R151) : ComponentsDokument6 SeitenManual Transmission / Transaxle (R151F, R151) : Componentsvõ đăng tiến100% (1)
- Design, Analysis and Fabrication of Shaft Driven MotorcycleDokument10 SeitenDesign, Analysis and Fabrication of Shaft Driven MotorcycleIJRASETPublicationsNoch keine Bewertungen
- Hydraulic BreakDokument8 SeitenHydraulic BreakTommy salimNoch keine Bewertungen
- Application of Chain Drive and It's Selection MethodDokument21 SeitenApplication of Chain Drive and It's Selection MethodYogesh BNoch keine Bewertungen
- 700-R4 Automatic Transmission Principles of Operation 2nd EditionDokument100 Seiten700-R4 Automatic Transmission Principles of Operation 2nd EditionMickey Mayo89% (9)
- 99B703 Audi R8 2008 Self Study ProgramDokument64 Seiten99B703 Audi R8 2008 Self Study ProgramVASEK100% (1)
- Traxxas Erevo VXL Part ListDokument3 SeitenTraxxas Erevo VXL Part ListΑδάμ ΝτόγκαςNoch keine Bewertungen
- Xtreme Forward Reach Forklift Xr1534 Parts ManualDokument20 SeitenXtreme Forward Reach Forklift Xr1534 Parts ManualNorma100% (50)
- BW65 / BW66: RWD 3 SpeedDokument12 SeitenBW65 / BW66: RWD 3 SpeedBAILESSNoch keine Bewertungen
- 25H PDFDokument275 Seiten25H PDFFran ChafNoch keine Bewertungen
- Denison Calzoni Type MRD Mrde MRV MrveDokument48 SeitenDenison Calzoni Type MRD Mrde MRV MrveSilvio RomanNoch keine Bewertungen
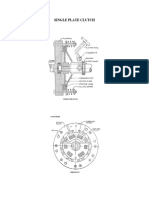
- Single Plate ClutchDokument4 SeitenSingle Plate Clutchsaffrin0% (2)
- 93FWD 6Dokument10 Seiten93FWD 6Luis Oswaldo Roa PerezNoch keine Bewertungen
- Industrial Gas Generator Drive Components CatalogDokument18 SeitenIndustrial Gas Generator Drive Components CatalogjuanaNoch keine Bewertungen
- Workshop Manual: LDW 422 Engines-4 Speed - EURO 2 Version Code 1-5302-662Dokument126 SeitenWorkshop Manual: LDW 422 Engines-4 Speed - EURO 2 Version Code 1-5302-662Rolandas PetkusNoch keine Bewertungen
- Torque Converters and Torque Dividers LessonDokument27 SeitenTorque Converters and Torque Dividers LessonLucky OkoteNoch keine Bewertungen