Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 2.7 V, 800 Μa, 80 Mhz Rail-To-Rail I/O Amplifiers /: Ad8031 Ad8032Dokument20 Seiten2.7 V, 800 Μa, 80 Mhz Rail-To-Rail I/O Amplifiers /: Ad8031 Ad8032abc1000Noch keine Bewertungen
- Connector BatteryDokument2 SeitenConnector Batteryabc1000Noch keine Bewertungen
- RF Cascode AmplifierDokument8 SeitenRF Cascode Amplifierabc1000Noch keine Bewertungen
- AD8307Dokument25 SeitenAD8307shubhamformeNoch keine Bewertungen
- PZT AmplifierDokument17 SeitenPZT Amplifierabc1000Noch keine Bewertungen
- Embedded Networking Modules: Features Xpico® Xport® Xport® Direct+ Xport® Pro Wiport® NR Micro 125 Uds1100-BDokument2 SeitenEmbedded Networking Modules: Features Xpico® Xport® Xport® Direct+ Xport® Pro Wiport® NR Micro 125 Uds1100-Babc1000Noch keine Bewertungen
- Section 5 Laplace TransformsDokument55 SeitenSection 5 Laplace Transformsabc1000Noch keine Bewertungen
- AD5061 NanoDACDokument20 SeitenAD5061 NanoDACabc1000Noch keine Bewertungen
- ArduinoMEGA2560 PDFDokument8 SeitenArduinoMEGA2560 PDFvvipmembersNoch keine Bewertungen
- DVC 1500 ManualDokument24 SeitenDVC 1500 Manualabc1000Noch keine Bewertungen
- DVC 1500 ManualDokument24 SeitenDVC 1500 Manualabc1000Noch keine Bewertungen
- Max21000 PDFDokument26 SeitenMax21000 PDFabc1000Noch keine Bewertungen
- Dual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin ConfigurationsDokument16 SeitenDual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin Configurationsabc1000Noch keine Bewertungen
- Nanoscribe - 2016 02 23Dokument57 SeitenNanoscribe - 2016 02 23abc1000Noch keine Bewertungen
- Naval Postgraduate School: Monterey, CaliforniaDokument51 SeitenNaval Postgraduate School: Monterey, Californiaabc1000Noch keine Bewertungen
- MTI Sales TermsDokument7 SeitenMTI Sales Termsabc1000Noch keine Bewertungen
- Recipes For NanoscribeDokument3 SeitenRecipes For Nanoscribeabc1000Noch keine Bewertungen
- Section 5 BetsDokument42 SeitenSection 5 Betsarturojimenez72Noch keine Bewertungen
- Motion Control Cheat SheetDokument9 SeitenMotion Control Cheat Sheetabc1000100% (1)
- French - Grammar - Tense - Booklet and Y12 Summer Task PDFDokument13 SeitenFrench - Grammar - Tense - Booklet and Y12 Summer Task PDFAnonymous LVibFVNoch keine Bewertungen
- Modeling Servo Motor System2 PDFDokument38 SeitenModeling Servo Motor System2 PDFabc1000Noch keine Bewertungen
- Paper RC ServomotorDokument6 SeitenPaper RC Servomotorabc1000Noch keine Bewertungen
- Bled Junior PDFDokument290 SeitenBled Junior PDFabc1000100% (1)
- IndexDokument124 SeitenIndexabc1000Noch keine Bewertungen
- A1266 DatasheetDokument15 SeitenA1266 Datasheetabc1000Noch keine Bewertungen
- Moving Pulse GeneratorDokument99 SeitenMoving Pulse Generatorabc1000100% (1)
- FQP30N06LDokument8 SeitenFQP30N06Labc1000Noch keine Bewertungen
- How To Make A Teaching Statement PDFDokument10 SeitenHow To Make A Teaching Statement PDFVeronica NedelcuNoch keine Bewertungen
- 74HC HCT04Dokument17 Seiten74HC HCT04Thomz AsadinawanNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AccelerationDokument24 SeitenAccelerationZa Natividad MarzanNoch keine Bewertungen
- To Medical PhysicsDokument165 SeitenTo Medical PhysicsHUAWEI HUAWEINoch keine Bewertungen
- 100 QuestionsDokument189 Seiten100 Questionsasdfsd2345Noch keine Bewertungen
- Mech-Iv-Kinematics of Machines (10me44) - Notes PDFDokument196 SeitenMech-Iv-Kinematics of Machines (10me44) - Notes PDFgopalNoch keine Bewertungen
- Lecture 16 - Bernoulli Applications 3Dokument14 SeitenLecture 16 - Bernoulli Applications 3يوسف عادل حسانين100% (1)
- Kinematic Characterization of Lacrosse Shooting Motions of The Dominant and Non-Dominant Side: 1940 Board #226 May 29, 3Dokument2 SeitenKinematic Characterization of Lacrosse Shooting Motions of The Dominant and Non-Dominant Side: 1940 Board #226 May 29, 3paulNoch keine Bewertungen
- Bruno Fernandez (2020) The Influence of Functional Flywheel Resistance Training On Movement Variability and Movement Velocity in Elite Rugby PlayersDokument9 SeitenBruno Fernandez (2020) The Influence of Functional Flywheel Resistance Training On Movement Variability and Movement Velocity in Elite Rugby PlayersmikilampreNoch keine Bewertungen
- Keep 317Dokument30 SeitenKeep 317nellai kumarNoch keine Bewertungen
- QP Answer Key Chandigarh NTSE Stg1 2018-19 SATDokument11 SeitenQP Answer Key Chandigarh NTSE Stg1 2018-19 SATkrishnaNoch keine Bewertungen
- Dynamics ch1Dokument104 SeitenDynamics ch1Miguel A. ChávezNoch keine Bewertungen
- Physics Important Questions For Inter 1st YearDokument3 SeitenPhysics Important Questions For Inter 1st Yearkakashi hatake100% (2)
- Aiats Syllabus 11th StudyingDokument2 SeitenAiats Syllabus 11th StudyingPrerna mittalNoch keine Bewertungen
- IB Practice - Calculus - Differentiation Applications (V2 Legacy)Dokument52 SeitenIB Practice - Calculus - Differentiation Applications (V2 Legacy)ishaanNoch keine Bewertungen
- Physics Dictionary: F4 - Chapter 1 - Introduction To PhysicsDokument12 SeitenPhysics Dictionary: F4 - Chapter 1 - Introduction To PhysicsHjhsnkjdhk NssNoch keine Bewertungen
- Work Done in Lifting An ObjectDokument15 SeitenWork Done in Lifting An ObjectLeon MathaiosNoch keine Bewertungen
- Trigenometry in Projectile MotionDokument8 SeitenTrigenometry in Projectile MotionJOSE LUIS DEL ROSARIONoch keine Bewertungen
- Class Ix Motion Cpp-1 (Uniform Motion)Dokument3 SeitenClass Ix Motion Cpp-1 (Uniform Motion)Vikram BatraNoch keine Bewertungen
- Grade 10 Physical Science VectorDokument13 SeitenGrade 10 Physical Science VectorGLADMAN PASIPANODYANoch keine Bewertungen
- HSC Physics Module 2: DynamicsDokument11 SeitenHSC Physics Module 2: DynamicswillNoch keine Bewertungen
- Glider and PulleyDokument7 SeitenGlider and PulleyPaul Jerick LaraNoch keine Bewertungen
- Lascience9 Q4 SLM10Dokument8 SeitenLascience9 Q4 SLM10Ervin DancaNoch keine Bewertungen
- M1 TextJT New1Dokument119 SeitenM1 TextJT New1ifratsubhaNoch keine Bewertungen
- Cheat Sheet Test #1Dokument1 SeiteCheat Sheet Test #1Tyler LogginsNoch keine Bewertungen
- Isolating Quantities PDFDokument11 SeitenIsolating Quantities PDFMilsonNoch keine Bewertungen
- 2020 UEC Physics Trial Paper 1Dokument5 Seiten2020 UEC Physics Trial Paper 1Benson TanNoch keine Bewertungen
- JawapanBab3 PDFDokument32 SeitenJawapanBab3 PDFMashithoh RosliNoch keine Bewertungen
- Definisi Fizik SPM PDFDokument7 SeitenDefinisi Fizik SPM PDFSafuan MokhtarNoch keine Bewertungen
- An Airplane Accelerates Down A Runway at 3Dokument4 SeitenAn Airplane Accelerates Down A Runway at 3Arga Agung NugrohoNoch keine Bewertungen
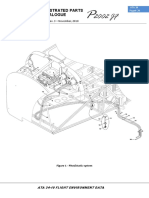
- Illustrated Parts Catalogue: Ed. 4 Rev. 3 - November, 2018Dokument2 SeitenIllustrated Parts Catalogue: Ed. 4 Rev. 3 - November, 2018Andrii KlishchevskyiNoch keine Bewertungen