Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Mechanism and Dynamics of Machinery - Hamilton H. MabieDokument330 SeitenMechanism and Dynamics of Machinery - Hamilton H. MabieErick Muñoz71% (7)
- Calculation of The Current Transformer Accuracy Limit FactorDokument14 SeitenCalculation of The Current Transformer Accuracy Limit FactorWeiKiat Goh67% (3)
- The Effect of Atom Position on X-Ray Diffraction IntensitiesDokument29 SeitenThe Effect of Atom Position on X-Ray Diffraction IntensitiesJorge De Jesus Torres ReyesNoch keine Bewertungen
- SchmertmannDokument13 SeitenSchmertmannkabasy20150% (1)
- Computational Modeling and Design of New Random Microheterogeneous MaterialsDokument227 SeitenComputational Modeling and Design of New Random Microheterogeneous MaterialsVicente Bergamini PugliaNoch keine Bewertungen
- Eleanor Oliphant Is Completely - Gail HoneymanDokument63 SeitenEleanor Oliphant Is Completely - Gail HoneymanVicente Bergamini Puglia0% (2)
- PULSE Data ManagerDokument70 SeitenPULSE Data ManagerVicente Bergamini PugliaNoch keine Bewertungen
- ZohdiDokument227 SeitenZohdiVicente Bergamini PugliaNoch keine Bewertungen
- Anil MisraDokument12 SeitenAnil MisraVicente Bergamini PugliaNoch keine Bewertungen
- Screw Conveyor Engineering Manual PDFDokument68 SeitenScrew Conveyor Engineering Manual PDFnadNoch keine Bewertungen
- Junbo Jia (Auth.) - Modern Earthquake Engineering - Offshore and Land-Based Structures-Springer-Verlag Berlin Heidelberg (2017) PDFDokument859 SeitenJunbo Jia (Auth.) - Modern Earthquake Engineering - Offshore and Land-Based Structures-Springer-Verlag Berlin Heidelberg (2017) PDFVicente Bergamini Puglia100% (2)
- AE02Dokument82 SeitenAE02Vicente Bergamini PugliaNoch keine Bewertungen
- B Value (Marzziotti Sandri 2003)Dokument12 SeitenB Value (Marzziotti Sandri 2003)Vicente Bergamini PugliaNoch keine Bewertungen
- ArtigoDokument12 SeitenArtigoVicente Bergamini PugliaNoch keine Bewertungen
- 1629 Pujol Smalley 1990Dokument14 Seiten1629 Pujol Smalley 1990Vicente Bergamini PugliaNoch keine Bewertungen
- Solving Problems in Scientific Computing Using Maple and MatlabDokument500 SeitenSolving Problems in Scientific Computing Using Maple and MatlabVicente Bergamini PugliaNoch keine Bewertungen
- WILLIAM, K. J WARNKE, E. P. Constitutive Model For The Triaxial Behaviour of Concrete.Dokument30 SeitenWILLIAM, K. J WARNKE, E. P. Constitutive Model For The Triaxial Behaviour of Concrete.Vicente Bergamini PugliaNoch keine Bewertungen
- H.S. ShangDokument8 SeitenH.S. ShangVicente Bergamini PugliaNoch keine Bewertungen
- Multi-Directional Modeling of Crack Pattern in 2D R/C MembersDokument14 SeitenMulti-Directional Modeling of Crack Pattern in 2D R/C MembersVicente Bergamini PugliaNoch keine Bewertungen
- W S YinDokument7 SeitenW S YinVicente Bergamini PugliaNoch keine Bewertungen
- Multi-Directional Modeling of Crack Pattern in 2D R/C MembersDokument14 SeitenMulti-Directional Modeling of Crack Pattern in 2D R/C MembersVicente Bergamini PugliaNoch keine Bewertungen
- Fatigue Capacity of Plain Concrete Under Fatigue Loading With Constant Confined StressDokument17 SeitenFatigue Capacity of Plain Concrete Under Fatigue Loading With Constant Confined StressVicente Bergamini PugliaNoch keine Bewertungen
- Andrzej LitewkaDokument21 SeitenAndrzej LitewkaVicente Bergamini PugliaNoch keine Bewertungen
- 03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPDokument19 Seiten03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPsaloni guptaNoch keine Bewertungen
- Surface Area of A Semi-Cylinder WorksheetDokument1 SeiteSurface Area of A Semi-Cylinder WorksheetvirtualmathsNoch keine Bewertungen
- 2 Alternating CurrentsDokument20 Seiten2 Alternating CurrentsJaseela NaufalNoch keine Bewertungen
- Basic Inertial NavigationDokument38 SeitenBasic Inertial Navigationleneneck9057100% (1)
- Compiled FluMach Problems - GROUP6 - BSME31Dokument58 SeitenCompiled FluMach Problems - GROUP6 - BSME31Jhun Briones100% (1)
- Change of Order of IntegrationDokument4 SeitenChange of Order of IntegrationShubham Teju100% (2)
- Kirchhoff's Laws: Sample Problem 1Dokument5 SeitenKirchhoff's Laws: Sample Problem 1Eduard LauronNoch keine Bewertungen
- CH 04Dokument17 SeitenCH 04Vishal PanwarNoch keine Bewertungen
- Valence MOTheoryDokument50 SeitenValence MOTheoryRodolfo Angulo OlaisNoch keine Bewertungen
- Chemical Thermodynamics: Module - 4Dokument25 SeitenChemical Thermodynamics: Module - 4TeachingTrainingCoaching KnowledgeSharingSessionNoch keine Bewertungen
- Section A: Multiple Choice Questions (20 Marks)Dokument4 SeitenSection A: Multiple Choice Questions (20 Marks)saed cabdiNoch keine Bewertungen
- Evaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsDokument7 SeitenEvaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsSivaramakrishnanNoch keine Bewertungen
- Math 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Dokument8 SeitenMath 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Kawsar MobinNoch keine Bewertungen
- Physics Investigatory ProjectDokument18 SeitenPhysics Investigatory ProjectRΛJIBUL ISLΛMNoch keine Bewertungen
- An Introduction To DC Generator Using Matlab/Simulink: Debabrata PalDokument4 SeitenAn Introduction To DC Generator Using Matlab/Simulink: Debabrata PalMohammad H Al-QaisiNoch keine Bewertungen
- Voltage and Frequency Control of Inverters Connected in Parallel Forming A Micro-GridDokument6 SeitenVoltage and Frequency Control of Inverters Connected in Parallel Forming A Micro-GridShad Rahman100% (1)
- WKST - 1.4 Converting Graphs - ChallengeDokument8 SeitenWKST - 1.4 Converting Graphs - Challengefaltu accountNoch keine Bewertungen
- Ossd U1Dokument26 SeitenOssd U1huangjunxiang4Noch keine Bewertungen
- EquiprobabilityDokument2 SeitenEquiprobabilitydanny222Noch keine Bewertungen
- Design of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterDokument4 SeitenDesign of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterwaleedkhanpelNoch keine Bewertungen
- Column Design Prokon.Dokument16 SeitenColumn Design Prokon.akankwasaNoch keine Bewertungen
- Lectu 14Dokument4 SeitenLectu 14YeviraArinDiyanaNoch keine Bewertungen
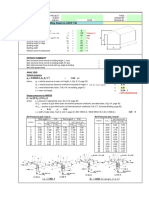
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Dokument2 SeitenWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNoch keine Bewertungen
- Case Based CH-3 Motion in Straight LineDokument5 SeitenCase Based CH-3 Motion in Straight LineGaneshNoch keine Bewertungen
- APEGBC Eng Syllabus MechanicalDokument22 SeitenAPEGBC Eng Syllabus MechanicalbaljinderNoch keine Bewertungen
- Large Deflections of Cantilever BeamsDokument4 SeitenLarge Deflections of Cantilever BeamsHasan Ayouby100% (1)
- 02 AtomsDokument3 Seiten02 AtomsZigmund Bryan CortezaNoch keine Bewertungen