Das könnte Ihnen auch gefallen
- I-Monitor Motor Controller Manual Rev 7 6Dokument72 SeitenI-Monitor Motor Controller Manual Rev 7 6elch310scridbNoch keine Bewertungen
- En 09 14 Eng Rev.4 Servo Gauge 854 AtgDokument6 SeitenEn 09 14 Eng Rev.4 Servo Gauge 854 AtgTrịnh Đức HạnhNoch keine Bewertungen
- SWBD MTR CNTRLDokument2 SeitenSWBD MTR CNTRLHenry WildNoch keine Bewertungen
- Ehpm R2a 2012-08-24Dokument11 SeitenEhpm R2a 2012-08-24Piush KumarNoch keine Bewertungen
- Boustead WHCP Esd Catalog With PicturesDokument16 SeitenBoustead WHCP Esd Catalog With PicturesbalajiNoch keine Bewertungen
- Digital PID ControllersDokument21 SeitenDigital PID Controllerssopan saNoch keine Bewertungen
- GE Druck DPI610 615 Is ManualDokument96 SeitenGE Druck DPI610 615 Is Manualqasim_maqboolNoch keine Bewertungen
- Fisher GX Control Valve and Actuator SystemDokument28 SeitenFisher GX Control Valve and Actuator SystemAmiroucheBenlakehalNoch keine Bewertungen
- Pressure Measurement Theory and Application GuideDokument32 SeitenPressure Measurement Theory and Application GuidePrateek Raj0% (1)
- Spare Part ListDokument1 SeiteSpare Part ListshantaNoch keine Bewertungen
- Fisher l2 Liquid Level Controllers en 135074Dokument16 SeitenFisher l2 Liquid Level Controllers en 135074GOKUL PRASADNoch keine Bewertungen
- Control Valve OcrDokument14 SeitenControl Valve OcrpathakshashankNoch keine Bewertungen
- Pneumatic LogicDokument27 SeitenPneumatic LogicEliasNoch keine Bewertungen
- Industrial Instrumentation IIDokument15 SeitenIndustrial Instrumentation IIHarsha_2994Noch keine Bewertungen
- 01 LTC CardDokument14 Seiten01 LTC CardAnujGargNoch keine Bewertungen
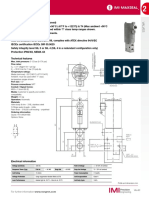
- IMI Maxseal ICO3S 1-2, 2-Way, 174 Psi, Auto PDFDokument1 SeiteIMI Maxseal ICO3S 1-2, 2-Way, 174 Psi, Auto PDFawahidNoch keine Bewertungen
- SS Pressure Gauge (Compact Case) Bourdon Type: Special FeaturesDokument4 SeitenSS Pressure Gauge (Compact Case) Bourdon Type: Special FeaturesRam KumarNoch keine Bewertungen
- TopDrive en PDFDokument2 SeitenTopDrive en PDFAbdallah AbdelrehimNoch keine Bewertungen
- Instructivodel Actuador Masoneilan Serie 88Dokument14 SeitenInstructivodel Actuador Masoneilan Serie 88Jhon SanabriaNoch keine Bewertungen
- ProductSpec Triconex Tricon 4351BDokument36 SeitenProductSpec Triconex Tricon 4351BARTURNoch keine Bewertungen
- Loop Testing - MCCDokument1 SeiteLoop Testing - MCCMiko QuijanoNoch keine Bewertungen
- 10 - Creation of Logic FunctionDokument6 Seiten10 - Creation of Logic FunctionFelipeNoch keine Bewertungen
- 1492 sg121 - en PDokument116 Seiten1492 sg121 - en PAnonymous Wu6FDjbNoch keine Bewertungen
- Iasimp Qr001a en PDokument10 SeitenIasimp Qr001a en PangelochicomaNoch keine Bewertungen
- 6month (Idins) - Control Valve Function Test and Positioner CalibrationDokument3 Seiten6month (Idins) - Control Valve Function Test and Positioner CalibrationJAGDEV PANESARNoch keine Bewertungen
- DPI610 615 ManualDokument90 SeitenDPI610 615 ManualAbd Al-Rahmman Al-qatananiNoch keine Bewertungen
- 5289 LOWIS SoftwareDokument8 Seiten5289 LOWIS SoftwareJovanni Sanchez AlvaradoNoch keine Bewertungen
- Revisions HistoryDokument25 SeitenRevisions Historyabdel taibNoch keine Bewertungen
- Micro Flat Cavitation Product BulletinDokument8 SeitenMicro Flat Cavitation Product BulletinAmiroucheBenlakehalNoch keine Bewertungen
- Control and Data Acquisition SystemsDokument17 SeitenControl and Data Acquisition SystemskumarnpccNoch keine Bewertungen
- Junction Box Requirements For Foundation FieldbusDokument3 SeitenJunction Box Requirements For Foundation FieldbuszhangyiliNoch keine Bewertungen
- ControlLogix® 5560M03SE Combination Controller and SERCOS Interface - 1756-In593a-En-PDokument48 SeitenControlLogix® 5560M03SE Combination Controller and SERCOS Interface - 1756-In593a-En-PElder MartinsNoch keine Bewertungen
- CAOIMPEX Drilling EquipmentDokument14 SeitenCAOIMPEX Drilling EquipmentRazi AbbasNoch keine Bewertungen
- PCS7 OpenOS 3rdparty Integration Foxboro en PDFDokument51 SeitenPCS7 OpenOS 3rdparty Integration Foxboro en PDFJuan Carlos Barberán MuñozNoch keine Bewertungen
- از ميترينگ PDFDokument5 Seitenاز ميترينگ PDFazitaggNoch keine Bewertungen
- ELTEK For Sale From Powerstorm 19nov14Dokument6 SeitenELTEK For Sale From Powerstorm 19nov14MorroJopalNoch keine Bewertungen
- General Industrial Pressure Gauges: ・Type A‥‥ ・Type B‥‥ ・Type C‥‥ ・Type D‥‥Dokument50 SeitenGeneral Industrial Pressure Gauges: ・Type A‥‥ ・Type B‥‥ ・Type C‥‥ ・Type D‥‥wiyoto 369Noch keine Bewertungen
- Asco Series 314 Exida Sil Certificate 2016Dokument2 SeitenAsco Series 314 Exida Sil Certificate 2016AkoKhalediNoch keine Bewertungen
- S-Mass Series Coriolis Mass Flow and Density Meters and SMT Series TransmittersDokument14 SeitenS-Mass Series Coriolis Mass Flow and Density Meters and SMT Series TransmittersazitaggNoch keine Bewertungen
- Industrial Control SystemDokument31 SeitenIndustrial Control Systempraveen100% (1)
- Electrical Submersible Pumps 101Dokument85 SeitenElectrical Submersible Pumps 101Anonymous ZSne5ChQNoch keine Bewertungen
- Mov's DetailsDokument13 SeitenMov's DetailsArjun ThakurNoch keine Bewertungen
- Main Report DCSDokument26 SeitenMain Report DCSjoymotiNoch keine Bewertungen
- Control Loop Hardware and TroubleshootingDokument51 SeitenControl Loop Hardware and TroubleshootingAhmed ElsayedNoch keine Bewertungen
- 7.21 TGOV1: Steam Turbine-GovernorDokument2 Seiten7.21 TGOV1: Steam Turbine-GovernorMuthukumar SNoch keine Bewertungen
- PF HART Multiplexer Support On PRMDokument24 SeitenPF HART Multiplexer Support On PRMinstruguy72Noch keine Bewertungen
- TDI Offline Setup GuideDokument17 SeitenTDI Offline Setup GuideAshwani Kumar JangraNoch keine Bewertungen
- Operating Instructions Flowsic600 Ultrasonic Gas Flow Meter en Im0011355Dokument138 SeitenOperating Instructions Flowsic600 Ultrasonic Gas Flow Meter en Im0011355farhan100% (1)
- OTD Product Services Presentation (2017) PDFDokument30 SeitenOTD Product Services Presentation (2017) PDFPrashant KrishnanNoch keine Bewertungen
- Artisan: DefinitiveDokument40 SeitenArtisan: DefinitiveJorge Eduardo Cerda OrtizNoch keine Bewertungen
- Field BusDokument108 SeitenField Busvenukumare100% (1)
- Controls & Instrumentation FOR 660 MW Supercritical Unit at TirodaDokument23 SeitenControls & Instrumentation FOR 660 MW Supercritical Unit at TirodaAakash kumar ShrivastavaNoch keine Bewertungen
- Omron NBDokument192 SeitenOmron NBmodelador3dNoch keine Bewertungen
- ASCO Filter RegulatorDokument4 SeitenASCO Filter RegulatorSamuel JohnsonNoch keine Bewertungen
- Yokogawa Centum CS3000Dokument43 SeitenYokogawa Centum CS3000Hammad AshrafNoch keine Bewertungen
- General Specifications: EJX120A Differential Pressure TransmitterDokument11 SeitenGeneral Specifications: EJX120A Differential Pressure TransmitterzaffarNoch keine Bewertungen
- Basic Control TheoryDokument8 SeitenBasic Control TheoryJuan Luis Merlo50% (2)
- PID TuningDokument26 SeitenPID TuningNair67udayNoch keine Bewertungen
- Exp - P8 - Multiprocess TrainerDokument19 SeitenExp - P8 - Multiprocess TrainerSiddesh PatilNoch keine Bewertungen
- CH 4 - Process Control J5800Dokument49 SeitenCH 4 - Process Control J5800mohd_mizanNoch keine Bewertungen
- ArturoMonteroSPPA P3000 UsefulDokument29 SeitenArturoMonteroSPPA P3000 Usefultrung2iNoch keine Bewertungen
- Air Pre Heater BrochureDokument11 SeitenAir Pre Heater Brochuretrung2iNoch keine Bewertungen
- Applying Artificial Intelligence Pegasus JiaDokument34 SeitenApplying Artificial Intelligence Pegasus Jiatrung2iNoch keine Bewertungen
- BoilerOpt Overview and Results 7-18-16-UsefulDokument53 SeitenBoilerOpt Overview and Results 7-18-16-Usefultrung2iNoch keine Bewertungen
- APP U.S. Peer Review Neuco-UsefulDokument66 SeitenAPP U.S. Peer Review Neuco-Usefultrung2iNoch keine Bewertungen
- Tosibox Datasheet Lock100 LRDokument2 SeitenTosibox Datasheet Lock100 LRtrung2iNoch keine Bewertungen
- HIMA WhitePaper CombustionControlDokument9 SeitenHIMA WhitePaper CombustionControltrung2iNoch keine Bewertungen
- Boiler Control Overview Siemens - AD353-132 r2Dokument9 SeitenBoiler Control Overview Siemens - AD353-132 r2George MarkasNoch keine Bewertungen
- An Intro To Boiler Control SystemsDokument35 SeitenAn Intro To Boiler Control SystemsShankarMukherjeeNoch keine Bewertungen
- Indian Scenario of Super Critical Power Plants Issues and Challenges by NTPC - Part 1Dokument39 SeitenIndian Scenario of Super Critical Power Plants Issues and Challenges by NTPC - Part 1ak_thimiriNoch keine Bewertungen
- Gilman Boilercontrol Expo06Dokument41 SeitenGilman Boilercontrol Expo06trung2iNoch keine Bewertungen
- T4S5O4 Paper PDFDokument17 SeitenT4S5O4 Paper PDFtrung2iNoch keine Bewertungen
- ABB-Application of Zirconia Analyzer in Combustion ControlDokument9 SeitenABB-Application of Zirconia Analyzer in Combustion Controltrung2iNoch keine Bewertungen
- FurnaceDokument8 SeitenFurnaceMAnish KumarNoch keine Bewertungen
- CONDENSER Air ExtractionDokument2 SeitenCONDENSER Air Extractiontrung2iNoch keine Bewertungen
- SECTION IV-Temperature StubDokument106 SeitenSECTION IV-Temperature Stubtrung2iNoch keine Bewertungen
- Lf3buss02-00en 012 PDFDokument6 SeitenLf3buss02-00en 012 PDFtantibaNoch keine Bewertungen
- Ics Powerplant of The FutureDokument64 SeitenIcs Powerplant of The Futuretrung2iNoch keine Bewertungen
- Bu53t01a01 02eDokument20 SeitenBu53t01a01 02etrung2iNoch keine Bewertungen
- 7126-Plus en WebDokument2 Seiten7126-Plus en Webtrung2iNoch keine Bewertungen
- Weidmueller Tech Note Turbo Ring V2 With Dual Ring 280411Dokument5 SeitenWeidmueller Tech Note Turbo Ring V2 With Dual Ring 280411trung2iNoch keine Bewertungen
- MOXA White Paper Turbo ChainDokument11 SeitenMOXA White Paper Turbo ChainErickReyesNoch keine Bewertungen
- Max DNADokument30 SeitenMax DNAtrung2iNoch keine Bewertungen
- Enclosures 4PP EA 201507.776Dokument4 SeitenEnclosures 4PP EA 201507.776trung2iNoch keine Bewertungen
- Ex2100 Startup GuideDokument88 SeitenEx2100 Startup GuideMADDOX45100% (1)
- Intelligent Monitoring InsertDokument2 SeitenIntelligent Monitoring Inserttrung2iNoch keine Bewertungen
- Intelligent Monitoring InsertDokument2 SeitenIntelligent Monitoring Inserttrung2iNoch keine Bewertungen
- Bin Level Indication in Coal Fired PowerplantDokument10 SeitenBin Level Indication in Coal Fired Powerplanttrung2iNoch keine Bewertungen
- Company Profile HAEMILDokument29 SeitenCompany Profile HAEMILtrung2iNoch keine Bewertungen
- Las Math 8 Q1-W1 2021-2022Dokument3 SeitenLas Math 8 Q1-W1 2021-2022Angela Camille PaynanteNoch keine Bewertungen
- Chase Evan Oliphant BiographyDokument1 SeiteChase Evan Oliphant Biographyapi-248803155Noch keine Bewertungen
- Manager Feedback Survey-GoogleDokument3 SeitenManager Feedback Survey-GoogleJorge Pinho da CruzNoch keine Bewertungen
- Driving TRDokument62 SeitenDriving TRmary jane garcinesNoch keine Bewertungen
- Sedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFDokument45 SeitenSedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFIndah LestariNoch keine Bewertungen
- Bid Documents 2022Dokument17 SeitenBid Documents 2022Arlene VillarosaNoch keine Bewertungen
- Reformation of Moral Philosophy and Its Foundation in Seerah of The Prophet MuhammadDokument15 SeitenReformation of Moral Philosophy and Its Foundation in Seerah of The Prophet MuhammadMuhammad Idrees LashariNoch keine Bewertungen
- MODULE 2 The Nature of The Human PersonDokument8 SeitenMODULE 2 The Nature of The Human PersonMary Grace Lobina ColamboNoch keine Bewertungen
- Nursing Philosophy PaperDokument6 SeitenNursing Philosophy PaperDanielle AalderinkNoch keine Bewertungen
- Bozic Niksa 2018 Chardak Ni Na Zemlji Ni Na Nebu PrikazDokument1 SeiteBozic Niksa 2018 Chardak Ni Na Zemlji Ni Na Nebu PrikazSanja LoncarNoch keine Bewertungen
- Electric CircuitsDokument7 SeitenElectric CircuitsEzio AuditoreNoch keine Bewertungen
- Fiori & Pratolongo-2021 - The Bahía Blanca EstuaryDokument579 SeitenFiori & Pratolongo-2021 - The Bahía Blanca EstuarykevinNoch keine Bewertungen
- Einstein, 'Parachor' and Molecular Volume: Some History and A SuggestionDokument10 SeitenEinstein, 'Parachor' and Molecular Volume: Some History and A SuggestionVIGHNESH BALKRISHNA LOKARENoch keine Bewertungen
- FIELD 01 2023 AxCmpDokument1 SeiteFIELD 01 2023 AxCmpAwadhiNoch keine Bewertungen
- Calculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Dokument25 SeitenCalculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Wilma Ganit BalasNoch keine Bewertungen
- DLP Math 1Dokument7 SeitenDLP Math 1Daniela Mae RobosaNoch keine Bewertungen
- Mathematics: Quarter 1 - Module 4: Properties of Operations On The Set of IntegersDokument25 SeitenMathematics: Quarter 1 - Module 4: Properties of Operations On The Set of Integersarnel paghacian100% (1)
- Script For HostingDokument2 SeitenScript For HostingNes DuranNoch keine Bewertungen
- Essay ReviseDokument4 SeitenEssay ReviseHanifah IndrianaNoch keine Bewertungen
- Jack Frost PDF v2Dokument94 SeitenJack Frost PDF v2Erick Adams100% (4)
- Experimental Designs in Sentence Processing Research: A Methodological Review and User's GuideDokument32 SeitenExperimental Designs in Sentence Processing Research: A Methodological Review and User's Guidesara1744Noch keine Bewertungen
- Smart Sensors For Real-Time Water Quality Monitoring: Subhas Chandra Mukhopadhyay Alex Mason EditorsDokument291 SeitenSmart Sensors For Real-Time Water Quality Monitoring: Subhas Chandra Mukhopadhyay Alex Mason EditorsmikeNoch keine Bewertungen
- Empathy in The WorkplaceDokument16 SeitenEmpathy in The Workplacesritha_87100% (1)
- A Different Approach To Estimate Air MoistureDokument7 SeitenA Different Approach To Estimate Air MoistureVal MosNoch keine Bewertungen
- Lecture 3 - DiasporaDokument6 SeitenLecture 3 - DiasporaFinn SalisburyNoch keine Bewertungen
- Abaqus Automatic Stabilization When and How To Use ItDokument8 SeitenAbaqus Automatic Stabilization When and How To Use ItBingkuai bigNoch keine Bewertungen
- User Manual Auto-Reclosing ProtectorDokument8 SeitenUser Manual Auto-Reclosing ProtectorThiago GusmãoNoch keine Bewertungen
- Metu Thesis On CappadociaDokument134 SeitenMetu Thesis On CappadociaRamazanNoch keine Bewertungen
- Operating Manual - Innova 2300, 2350Dokument46 SeitenOperating Manual - Innova 2300, 2350scottstreetNoch keine Bewertungen
- 362100deff40258 Exde03 35Dokument44 Seiten362100deff40258 Exde03 35Daniel SdNoch keine Bewertungen