Das könnte Ihnen auch gefallen
- Blue Laser Diode in TO90 Package: FeaturesDokument10 SeitenBlue Laser Diode in TO90 Package: FeaturesNikola MijailovićNoch keine Bewertungen
- Krutost PDFDokument10 SeitenKrutost PDFNikola MijailovićNoch keine Bewertungen
- Osram Blue Laser Diode PDFDokument2 SeitenOsram Blue Laser Diode PDFNikola MijailovićNoch keine Bewertungen
- Kompajleri I Interpretatori PDFDokument118 SeitenKompajleri I Interpretatori PDFvesko76Noch keine Bewertungen
- WssjsaDokument324 SeitenWssjsaNikola MijailovićNoch keine Bewertungen
- Crystals 08 00355 PDFDokument27 SeitenCrystals 08 00355 PDFNikola MijailovićNoch keine Bewertungen
- Linux System Administrators GuideDokument106 SeitenLinux System Administrators GuideAkop KarapetyanNoch keine Bewertungen
- Papper ResearchDokument3 SeitenPapper ResearchNikola MijailovićNoch keine Bewertungen
- DiffeoDemons NeuroImage08 VercauterenDokument29 SeitenDiffeoDemons NeuroImage08 VercauterenNikola MijailovićNoch keine Bewertungen
- Modeling of Radiation Dose of Human Head During CT Scanning Using Neural NetworksDokument4 SeitenModeling of Radiation Dose of Human Head During CT Scanning Using Neural NetworksNikola MijailovićNoch keine Bewertungen
- Lorem Ipsum Dolor Sit Amet, ConsecteturDokument1 SeiteLorem Ipsum Dolor Sit Amet, ConsecteturNikola MijailovićNoch keine Bewertungen
- Pami 93 ADokument12 SeitenPami 93 ANikola MijailovićNoch keine Bewertungen
- Ants TheoryDokument11 SeitenAnts TheoryNikola MijailovićNoch keine Bewertungen
- 2Dokument10 Seiten2NamanMishraNoch keine Bewertungen
- Author Final VersionDokument21 SeitenAuthor Final VersionNikola MijailovićNoch keine Bewertungen
- Journal of Biomechanics: K.S. Halonen, M.E. Mononen, J.S. Jurvelin, J. To ̈yräs, J. Salo, R.K. KorhonenDokument8 SeitenJournal of Biomechanics: K.S. Halonen, M.E. Mononen, J.S. Jurvelin, J. To ̈yräs, J. Salo, R.K. KorhonenNikola MijailovićNoch keine Bewertungen
- Fast Parametric Elastic Image RegistrationDokument17 SeitenFast Parametric Elastic Image RegistrationNikola MijailovićNoch keine Bewertungen
- Full Text 01Dokument69 SeitenFull Text 01Nikola MijailovićNoch keine Bewertungen
- MarinaDokument6 SeitenMarinaNikola MijailovićNoch keine Bewertungen
- CRL-94-1image Registration Spatial DomainDokument44 SeitenCRL-94-1image Registration Spatial DomainNikola MijailovićNoch keine Bewertungen
- Gavin K. Brennen Anqd Ivan H. Deutsch - Entangling Dipole-Dipole Interactions and Quantum Logic in Optical LatticesDokument53 SeitenGavin K. Brennen Anqd Ivan H. Deutsch - Entangling Dipole-Dipole Interactions and Quantum Logic in Optical LatticesNikola MijailovićNoch keine Bewertungen
- Young LaplaceDokument12 SeitenYoung LaplaceNikola MijailovićNoch keine Bewertungen
- 1 s2.0 S001044851400178X MainDokument14 Seiten1 s2.0 S001044851400178X MainNikola MijailovićNoch keine Bewertungen
- FotogrametrijaDokument2 SeitenFotogrametrijaNikola MijailovićNoch keine Bewertungen
- Journal of Biomechanics: Nariman Jahani, Youbing Yin, Eric A. Hoffman, Ching-Long LinDokument8 SeitenJournal of Biomechanics: Nariman Jahani, Youbing Yin, Eric A. Hoffman, Ching-Long LinNikola MijailovićNoch keine Bewertungen
- 1 s2.0 S0021929099001517 MainDokument6 Seiten1 s2.0 S0021929099001517 MainNikola MijailovićNoch keine Bewertungen
- 10 Final RemarksDokument2 Seiten10 Final RemarksNikola MijailovićNoch keine Bewertungen
- Relations of Mechanical Properties To Density and CT Numbers in Human BoneDokument9 SeitenRelations of Mechanical Properties To Density and CT Numbers in Human BoneNikola MijailovićNoch keine Bewertungen
- 1 s2.0 S002013831300288X MainDokument6 Seiten1 s2.0 S002013831300288X MainNikola MijailovićNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Decimation PDFDokument83 SeitenDecimation PDFJose Gonzalez SapbeeNoch keine Bewertungen
- Awex C-Rubic PDFDokument4 SeitenAwex C-Rubic PDFglisha84Noch keine Bewertungen
- DS-KD8003-IME1 Video Intercom Module Door Station: Key FeatureDokument4 SeitenDS-KD8003-IME1 Video Intercom Module Door Station: Key FeatureYakerWalidNoch keine Bewertungen
- Wifi Printer Setting GuideDokument3 SeitenWifi Printer Setting GuideChris Le TsarNoch keine Bewertungen
- Msdac Project1Dokument20 SeitenMsdac Project1SGVU UniversityNoch keine Bewertungen
- Considerations and Benefits of Using Five Zones For Distance ProtectionDokument12 SeitenConsiderations and Benefits of Using Five Zones For Distance ProtectionSrinivasan SriniNoch keine Bewertungen
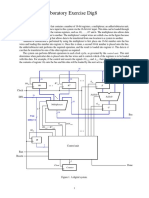
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDokument6 SeitenLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNoch keine Bewertungen
- Haier 42ep25bat 42hp25bat PlasmaDokument46 SeitenHaier 42ep25bat 42hp25bat PlasmaDoru RazvanNoch keine Bewertungen
- CH Digital Temperature Controller Instruction ManualDokument10 SeitenCH Digital Temperature Controller Instruction Manualgurguri5691100% (1)
- COA Unit 1 Lecture 4Dokument35 SeitenCOA Unit 1 Lecture 4Pratibha SNoch keine Bewertungen
- Pflex Ap011 - Conexion Electrica Variadoes 40 525Dokument132 SeitenPflex Ap011 - Conexion Electrica Variadoes 40 525CarlosOtinianoNoch keine Bewertungen
- dwr-932 Man Revf1 1-00 Eu Multi 20210610Dokument99 Seitendwr-932 Man Revf1 1-00 Eu Multi 20210610Duje VidekaNoch keine Bewertungen
- MCQ Electrical Engg. Unit 1.Dokument69 SeitenMCQ Electrical Engg. Unit 1.Trupti NandikolmathNoch keine Bewertungen
- Data Sheet: Programmable Linear Hall-Effect SensorDokument31 SeitenData Sheet: Programmable Linear Hall-Effect SensorpurwadiNoch keine Bewertungen
- 32HFL5662L (F7) - 37HFL5682L (F7) - 42HFL5682L (F7) CH - TPB1.1HU (LA) (sm-EN 3122 785 18880) PDFDokument91 Seiten32HFL5662L (F7) - 37HFL5682L (F7) - 42HFL5682L (F7) CH - TPB1.1HU (LA) (sm-EN 3122 785 18880) PDFJory20050% (2)
- Fiber optic cable sensor range and featuresDokument2 SeitenFiber optic cable sensor range and featuresindustronicaNoch keine Bewertungen
- Lecture 1Dokument29 SeitenLecture 1Esraa SamirNoch keine Bewertungen
- EDX WP Int MC Plan Using EDX SignalPro PDFDokument7 SeitenEDX WP Int MC Plan Using EDX SignalPro PDFMustaf MohamedNoch keine Bewertungen
- Additional Safety and EMC Information 5.97005.01: Baumüller C C BKF12/ ... 2000Dokument29 SeitenAdditional Safety and EMC Information 5.97005.01: Baumüller C C BKF12/ ... 2000Evandro PavesiNoch keine Bewertungen
- Variator TensiuneDokument8 SeitenVariator TensiuneCristyMitre100% (1)
- ES 1 MarkDokument5 SeitenES 1 MarkVenkatesan SundaramNoch keine Bewertungen
- Advanced Paper Cutting Machine Using ARM7: SenseDokument3 SeitenAdvanced Paper Cutting Machine Using ARM7: SensechotichanduNoch keine Bewertungen
- 2007 Nonis TCAS CML Divider DesignDokument10 Seiten2007 Nonis TCAS CML Divider DesignDavidNoch keine Bewertungen
- Tut 6Dokument2 SeitenTut 6rkhanna1965Noch keine Bewertungen
- Basics: General Packet Radio ServicesDokument12 SeitenBasics: General Packet Radio ServiceschaupaNoch keine Bewertungen
- CPT Cirprotec PSC4 12 - 5 400 TT IR 77738406Dokument8 SeitenCPT Cirprotec PSC4 12 - 5 400 TT IR 77738406niltonnas80Noch keine Bewertungen
- Seventy Years of Getting Transistorized 2017Dokument5 SeitenSeventy Years of Getting Transistorized 2017RajatNoch keine Bewertungen
- A Superregen Receiver For FM Broadcast or Aircraft Band AM ReceptionDokument4 SeitenA Superregen Receiver For FM Broadcast or Aircraft Band AM ReceptionNestor EscobarNoch keine Bewertungen
- Dell E157FPC Service Manual PDFDokument122 SeitenDell E157FPC Service Manual PDFOlho AladoNoch keine Bewertungen
- Tyco ADC NetworkDokument28 SeitenTyco ADC NetworkraneensysNoch keine Bewertungen