Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
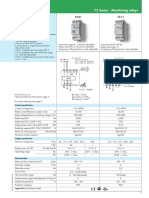
- Finder 72 01-9-024 0000 10a Level Control Monitoring Relay SPDT Co 250vac 72-01-9 024 0000 Data SheetDokument12 SeitenFinder 72 01-9-024 0000 10a Level Control Monitoring Relay SPDT Co 250vac 72-01-9 024 0000 Data SheetAlen KušecNoch keine Bewertungen
- Continuous Level Measurement Guided Wave Radar TransmittersDokument43 SeitenContinuous Level Measurement Guided Wave Radar TransmittersAlen KušecNoch keine Bewertungen
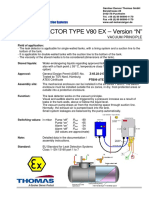
- V80EX N Data SheetDokument1 SeiteV80EX N Data SheetAlen KušecNoch keine Bewertungen
- Rittal 1536510 Technical Details 3 2830Dokument1 SeiteRittal 1536510 Technical Details 3 2830Alen KušecNoch keine Bewertungen
- Integral Bonnet Needle Valves: SS-18KF8Dokument2 SeitenIntegral Bonnet Needle Valves: SS-18KF8Alen KušecNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Log InterpretationDokument181 SeitenLog InterpretationJorge Luis RamosNoch keine Bewertungen
- DPP 04 Ionic Equilibrium JH Sir-4172Dokument4 SeitenDPP 04 Ionic Equilibrium JH Sir-4172Shivam KumarNoch keine Bewertungen
- Professional Application ManualDokument70 SeitenProfessional Application ManualMuthuKumarNoch keine Bewertungen
- Drilling Fluid: Lodo de PerforaciónDokument21 SeitenDrilling Fluid: Lodo de PerforaciónBelén Ramos100% (1)
- Uncovering the Silicon - ΜL914 - Evil Mad Scientist LaboratoriesDokument21 SeitenUncovering the Silicon - ΜL914 - Evil Mad Scientist LaboratoriesGulapo GapoNoch keine Bewertungen
- Nerve Muscle PhysioDokument30 SeitenNerve Muscle Physiopatel_hanisha06Noch keine Bewertungen
- Avalanche Photodiodes PDFDokument3 SeitenAvalanche Photodiodes PDFcmenikarachchiNoch keine Bewertungen
- Supersonic Aircraft PropulsionDokument5 SeitenSupersonic Aircraft PropulsionRaajeswaran BaskaranNoch keine Bewertungen
- Design of Plum Concrete Breast Wall Design Note No: SAI/TKD-219016/PKG-5/DN/STR/BW-04Dokument9 SeitenDesign of Plum Concrete Breast Wall Design Note No: SAI/TKD-219016/PKG-5/DN/STR/BW-04Rishikesh Majumdar100% (2)
- Buhler 2003-Vademecum For Vitamin FormulationsDokument144 SeitenBuhler 2003-Vademecum For Vitamin FormulationsRok Kopinč100% (1)
- Andi Mandi ShandiDokument6 SeitenAndi Mandi ShandiSundar LalNoch keine Bewertungen
- OilCharacterization Adeyab PDFDokument18 SeitenOilCharacterization Adeyab PDFJhosymarSantosGutierrezNoch keine Bewertungen
- Radiograph InterpretationDokument12 SeitenRadiograph InterpretationnithingrmeNoch keine Bewertungen
- What To Expect When You're Expecting FEA - A Guide To Good PracticeDokument15 SeitenWhat To Expect When You're Expecting FEA - A Guide To Good PracticeSHANMUGAM VNoch keine Bewertungen
- Lab Report Food Processing (Blanching)Dokument5 SeitenLab Report Food Processing (Blanching)siti irdinaNoch keine Bewertungen
- Product Catalogue SomefluDokument20 SeitenProduct Catalogue SomefluIlkuNoch keine Bewertungen
- DibenzalacetoneDokument12 SeitenDibenzalacetoneektorasyiannakas0% (1)
- Valve SizingDokument1 SeiteValve SizingdlescribdNoch keine Bewertungen
- Reljanovic Et Al. - 1999 - Treatment of Diabetic Polyneuropathy With The Antioxidant Thioctic Acid (Alpha-Lipoic Acid) A Two Year Multi Center Randomized DoubleDokument9 SeitenReljanovic Et Al. - 1999 - Treatment of Diabetic Polyneuropathy With The Antioxidant Thioctic Acid (Alpha-Lipoic Acid) A Two Year Multi Center Randomized DoubleJay LawNoch keine Bewertungen
- Art-Método Tergotómetro PDFDokument4 SeitenArt-Método Tergotómetro PDFEdinsonMuñozNoch keine Bewertungen
- P740JDokument2 SeitenP740JTan Chen TatNoch keine Bewertungen
- Review of Cansolv SO Scrubbing System's First Commercial Operations in The Oil Refining IndustryDokument17 SeitenReview of Cansolv SO Scrubbing System's First Commercial Operations in The Oil Refining Industryrogerh44Noch keine Bewertungen
- Overview : Process of ElectrolysisDokument5 SeitenOverview : Process of Electrolysisn73686861Noch keine Bewertungen
- Excimer LasersDokument13 SeitenExcimer LasersMilivoje IvkovicNoch keine Bewertungen
- Barabrine SiDokument2 SeitenBarabrine SiRohan SahniNoch keine Bewertungen
- Nozzle Design - The Weak Point of Every Equipment - Training & EngineeringDokument11 SeitenNozzle Design - The Weak Point of Every Equipment - Training & EngineeringTC Capulcu Mustafa M0% (1)
- Process and Material SpecificationDokument8 SeitenProcess and Material Specificationbrains26Noch keine Bewertungen
- Physica E: Qianhui Yang, Liren Lou, Guanzhong WangDokument6 SeitenPhysica E: Qianhui Yang, Liren Lou, Guanzhong WangHabibi SaifuddinNoch keine Bewertungen
- Physical Chemistry (CHM3101) : Equilibrium Electrochemistry Reference: Atkins, 9 Edition, Chapter 6Dokument43 SeitenPhysical Chemistry (CHM3101) : Equilibrium Electrochemistry Reference: Atkins, 9 Edition, Chapter 6Nur EizzatiNoch keine Bewertungen