Das könnte Ihnen auch gefallen
- Least Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDokument24 SeitenLeast Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDenis Constantin Ilie-AblachimNoch keine Bewertungen
- Suzuki Et Al IEEE ICCA 2000 x1Dokument6 SeitenSuzuki Et Al IEEE ICCA 2000 x1Denis Constantin Ilie-AblachimNoch keine Bewertungen
- Rezolvari Exercitii - 2015Dokument11 SeitenRezolvari Exercitii - 2015Denis Constantin Ilie-AblachimNoch keine Bewertungen
- Modeling The Joint Statistics of Images in The Wavelet DomainDokument8 SeitenModeling The Joint Statistics of Images in The Wavelet DomainDenis Constantin Ilie-AblachimNoch keine Bewertungen
- Visser 2011 Prem SCDokument54 SeitenVisser 2011 Prem SCDenis Constantin Ilie-AblachimNoch keine Bewertungen
- Verbs Followed by GerundsDokument6 SeitenVerbs Followed by GerundsDenis Constantin Ilie-AblachimNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Volvo VN VHD Version 2 Electrical Schematic From Build Date 10 03Dokument10 SeitenVolvo VN VHD Version 2 Electrical Schematic From Build Date 10 03stanley100% (52)
- Ford Manual Police PackageDokument76 SeitenFord Manual Police PackageKevin TimmonsNoch keine Bewertungen
- Padernal-BSA-1A-SW-Accounts ReceivableDokument4 SeitenPadernal-BSA-1A-SW-Accounts ReceivableFly ThoughtsNoch keine Bewertungen
- BRTC Test Rate - 2014-2015 - 16-2-15Dokument5 SeitenBRTC Test Rate - 2014-2015 - 16-2-15Tahmidur Rahman100% (2)
- The Advantage in The Greek Shipping IndustryDokument26 SeitenThe Advantage in The Greek Shipping IndustryNikos Anta Tagalhs100% (1)
- 14240FL ThyssenKruppDokument21 Seiten14240FL ThyssenKruppManish Singh50% (2)
- Procedure For LSMGO & ULSFO Change-OverDokument7 SeitenProcedure For LSMGO & ULSFO Change-OverGauravNoch keine Bewertungen
- Transit-Oriented Development (TOD) For Urban Sustainability: A Comparative Case Study of Beijing and Shenzhen, ChinaDokument128 SeitenTransit-Oriented Development (TOD) For Urban Sustainability: A Comparative Case Study of Beijing and Shenzhen, Chinamonika senthilNoch keine Bewertungen
- Physical Distribution: Role of Transportation in The Supply Cain Modes of TransportationDokument14 SeitenPhysical Distribution: Role of Transportation in The Supply Cain Modes of TransportationJonathan EscamillanNoch keine Bewertungen
- Pantaloon ReportDokument16 SeitenPantaloon ReportHimanshu Rastogi100% (1)
- Judging Ayodhya: Book ReviewsDokument79 SeitenJudging Ayodhya: Book ReviewsUjjwal DixitNoch keine Bewertungen
- DILG Memo - Circular 20111014 3c8ad8f9ca PDFDokument1 SeiteDILG Memo - Circular 20111014 3c8ad8f9ca PDFOhmar Quitan CulangNoch keine Bewertungen
- The Legend of King Kong - Bo GoldmanDokument133 SeitenThe Legend of King Kong - Bo GoldmanEusebio García RojasNoch keine Bewertungen
- Build High DA Backlinks - SEO VertexDokument6 SeitenBuild High DA Backlinks - SEO VertexHarsh Pinjani100% (1)
- DE 2512/10 OCT/FRA-LHR: - Not For Real World NavigationDokument56 SeitenDE 2512/10 OCT/FRA-LHR: - Not For Real World NavigationHendrikNoch keine Bewertungen
- Caustic Soda Feasibility StudyDokument75 SeitenCaustic Soda Feasibility StudyMarcos Gonzalez50% (2)
- PM 15Dokument16 SeitenPM 15Daniel4044Noch keine Bewertungen
- Assign 2sept16 IndividualDokument4 SeitenAssign 2sept16 IndividualThiran VinharNoch keine Bewertungen
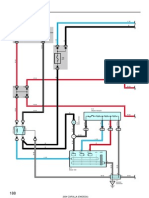
- 2004 Corolla Air Conditioning Wiring DiagramDokument4 Seiten2004 Corolla Air Conditioning Wiring Diagramjldamasceno100% (2)
- TCM15 18 PDFDokument508 SeitenTCM15 18 PDFВикторNoch keine Bewertungen
- Wa0000 PDFDokument76 SeitenWa0000 PDFSumitNoch keine Bewertungen
- School Bus Pre-Trip Inspection ChecklistDokument1 SeiteSchool Bus Pre-Trip Inspection Checklistadmin embNoch keine Bewertungen
- Ready Reckoner N1Dokument2 SeitenReady Reckoner N1manojNoch keine Bewertungen
- Name of The Experiment: 2. Objective-: A. Primary Particulars Estimation: Given ParticularsDokument8 SeitenName of The Experiment: 2. Objective-: A. Primary Particulars Estimation: Given ParticularsSakib RafeeNoch keine Bewertungen
- Scroll Down To Read The ArticleDokument23 SeitenScroll Down To Read The ArticlerickNoch keine Bewertungen
- Crs 210 CWDokument86 SeitenCrs 210 CWRommel GeronimoNoch keine Bewertungen
- Panama Canal - Compliance Check-ListDokument5 SeitenPanama Canal - Compliance Check-ListDragan JerčićNoch keine Bewertungen
- ĐỀ SỐ 22Dokument5 SeitenĐỀ SỐ 22Anh MaiNoch keine Bewertungen
- Hyderabad Nandyal: Departure ArrivalDokument2 SeitenHyderabad Nandyal: Departure ArrivalKarthik PalaniNoch keine Bewertungen
- Immo Bypass On - LeirasDokument24 SeitenImmo Bypass On - LeirasalfainyeccionNoch keine Bewertungen