Das könnte Ihnen auch gefallen
- DinoenhuevoDokument13 SeitenDinoenhuevoRiquirran Art100% (14)
- A Lua No CinemaDokument5 SeitenA Lua No CinemaMilena GuedesNoch keine Bewertungen
- Questões de Direito ConstitucionalDokument11 SeitenQuestões de Direito ConstitucionalRaquel Bezerra SNoch keine Bewertungen
- Slides SeminariosDokument14 SeitenSlides SeminariosRaquel Bezerra SNoch keine Bewertungen
- CartografiaDokument50 SeitenCartografiaRaquel Bezerra SNoch keine Bewertungen
- Questoes Ciencias Dos MateriaisDokument3 SeitenQuestoes Ciencias Dos MateriaisRaquel Bezerra SNoch keine Bewertungen
- Cartas de Controle Por VariáveisDokument1 SeiteCartas de Controle Por VariáveisAnderson ReisNoch keine Bewertungen
- Exercicio de TampaoDokument2 SeitenExercicio de TampaoRaquel Bezerra SNoch keine Bewertungen
- Sistema Financeiro NacionalDokument1 SeiteSistema Financeiro NacionalRaquel Bezerra SNoch keine Bewertungen
- TopicosDokument8 SeitenTopicosRaquel Bezerra SNoch keine Bewertungen
- Direito EleitoralDokument3 SeitenDireito EleitoralRaquel Bezerra SNoch keine Bewertungen
- O Reator em Que Os Reagentes A e B Entram em Proporções Iguais Com Uma Vazão Molar Total Derivação FDokument1 SeiteO Reator em Que Os Reagentes A e B Entram em Proporções Iguais Com Uma Vazão Molar Total Derivação FRaquel Bezerra SNoch keine Bewertungen
- Tradução Capitilo 2-AstromDokument31 SeitenTradução Capitilo 2-AstromRaquel Bezerra SNoch keine Bewertungen
- Tradução Livro Process Sytems Analusis and ControlDokument4 SeitenTradução Livro Process Sytems Analusis and ControlRaquel Bezerra SNoch keine Bewertungen
- Resumo Capitulo 1Dokument2 SeitenResumo Capitulo 1Raquel Bezerra SNoch keine Bewertungen
- Questões Conhecimentos BancárioDokument4 SeitenQuestões Conhecimentos BancárioRaquel Bezerra SNoch keine Bewertungen
- Tradução Cap 9 ChenDokument20 SeitenTradução Cap 9 ChenRaquel Bezerra SNoch keine Bewertungen
- Implementação Do Regulador Linear Quadrático para o Tanque CSTR - TraduçãoDokument13 SeitenImplementação Do Regulador Linear Quadrático para o Tanque CSTR - TraduçãoRaquel Bezerra SNoch keine Bewertungen
- Tradução Livro Process Sytems Analusis and ControlDokument4 SeitenTradução Livro Process Sytems Analusis and ControlRaquel Bezerra SNoch keine Bewertungen
- 2-Sistema de Equaçoes Lineares - Livro de Algebra Linear IDokument17 Seiten2-Sistema de Equaçoes Lineares - Livro de Algebra Linear IFábio ArcanjoNoch keine Bewertungen
- Ogata 5 Ed Cap 10Dokument14 SeitenOgata 5 Ed Cap 10Raquel Bezerra SNoch keine Bewertungen
- Tradução Livro Process Sytems Analusis and ControlDokument4 SeitenTradução Livro Process Sytems Analusis and ControlRaquel Bezerra SNoch keine Bewertungen
- Curso MatlabDokument146 SeitenCurso Matlabpeter06060% (1)
- Elc418 Exer 5Dokument15 SeitenElc418 Exer 5Raquel Bezerra SNoch keine Bewertungen
- Cap 1Dokument7 SeitenCap 1anon-784612Noch keine Bewertungen
- Ogata 5 Ed Cap 10Dokument14 SeitenOgata 5 Ed Cap 10Raquel Bezerra SNoch keine Bewertungen
- 2-Sistema de Equaçoes Lineares - Livro de Algebra Linear IDokument17 Seiten2-Sistema de Equaçoes Lineares - Livro de Algebra Linear IFábio ArcanjoNoch keine Bewertungen
- Configuração UnitariaDokument1 SeiteConfiguração UnitariaRaquel Bezerra SNoch keine Bewertungen
- Sistema Financeiro NacionalDokument1 SeiteSistema Financeiro NacionalRaquel Bezerra SNoch keine Bewertungen
- GraficoDokument8 SeitenGraficoRaquel Bezerra SNoch keine Bewertungen
- Cálculo de EquivalenteDokument2 SeitenCálculo de EquivalenteRaquel Bezerra SNoch keine Bewertungen
- Aje SalugaDokument3 SeitenAje Salugawalney0% (1)
- Hannah ArendtDokument7 SeitenHannah ArendtLaurelia MonteiroNoch keine Bewertungen
- GeorreferenciamentoDokument13 SeitenGeorreferenciamentoThaís BomfimNoch keine Bewertungen
- Curso - ANIMISMODokument43 SeitenCurso - ANIMISMOcelsobarretoNoch keine Bewertungen
- CP EO MAT b1 P7 Internet SC PDFDokument42 SeitenCP EO MAT b1 P7 Internet SC PDFLaís RaquelNoch keine Bewertungen
- Boas Práticas de Manipulação de Produtos EstéreisDokument12 SeitenBoas Práticas de Manipulação de Produtos EstéreisgbmmmNoch keine Bewertungen
- PARNASIANISMODokument24 SeitenPARNASIANISMOrose3cariagaNoch keine Bewertungen
- FilekDokument4 SeitenFilekEwerton GuimarãesNoch keine Bewertungen
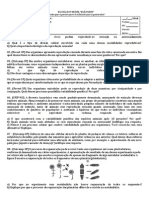
- Exercícios de Reprodução Sexuada e AssexuadaDokument2 SeitenExercícios de Reprodução Sexuada e AssexuadaSheila Souza Vieira100% (4)
- Livro de Biologia AveoDokument171 SeitenLivro de Biologia AveoVictor Mbanji100% (5)
- Criptografando e Descriptografando Dados Com NodeJSDokument10 SeitenCriptografando e Descriptografando Dados Com NodeJSPaulo Eduardo TozziNoch keine Bewertungen
- Entrevista Com Os Pais Modelo AberasturyDokument8 SeitenEntrevista Com Os Pais Modelo AberasturyNarriman BasilioNoch keine Bewertungen
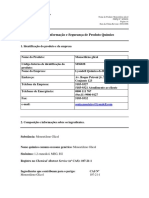
- FISPQ Monoetilenoglicol (MEG)Dokument8 SeitenFISPQ Monoetilenoglicol (MEG)Wanderson CaldeiraNoch keine Bewertungen
- O Enfoque Da Logística Humanitária Na Localização de Uma Central de Inteligência - Fernandes - 2010Dokument273 SeitenO Enfoque Da Logística Humanitária Na Localização de Uma Central de Inteligência - Fernandes - 2010luanaNoch keine Bewertungen
- Exercitando (Aula01 Top1)Dokument1 SeiteExercitando (Aula01 Top1)Zaquiel AndradeNoch keine Bewertungen
- 0730 - Monitorização e Medição de ProcessosDokument114 Seiten0730 - Monitorização e Medição de Processosisabel roseiro100% (1)
- Homeopatia e Principios Alquimicos - Agricultura OrganicaDokument186 SeitenHomeopatia e Principios Alquimicos - Agricultura OrganicaBruna Ribas Russ100% (1)
- Memorial Do Convento Capitulo I Recuperado AutomaticamenteDokument34 SeitenMemorial Do Convento Capitulo I Recuperado AutomaticamentelizaNoch keine Bewertungen
- FILHOS DAS ESTRELAS - Crianças Índigos, Violetas, Esmeraldas, Cristais, Douradas, Arco-ÍrisDokument38 SeitenFILHOS DAS ESTRELAS - Crianças Índigos, Violetas, Esmeraldas, Cristais, Douradas, Arco-ÍrisGuilherme SantosNoch keine Bewertungen
- Museu Virtual 4 UnidadeDokument13 SeitenMuseu Virtual 4 UnidadeClecia OliveiraNoch keine Bewertungen
- Cesar Camargo MarianoDokument140 SeitenCesar Camargo MarianoIvan Beck100% (3)
- Ficha de Portugues - 2ano PDFDokument3 SeitenFicha de Portugues - 2ano PDFmoandreaNoch keine Bewertungen
- Modelo Do Termo de Compromisso de Estágio ObrigatórioDokument3 SeitenModelo Do Termo de Compromisso de Estágio ObrigatórioRobert SimãoNoch keine Bewertungen
- Tributacao Do Sistema FinanceiroDokument21 SeitenTributacao Do Sistema FinanceiroSergio Alfredo Macore100% (3)
- SARMENTO Manuel GOUVEIA Maria Cristina SoaresDokument15 SeitenSARMENTO Manuel GOUVEIA Maria Cristina SoaresAna Maria Rosatto ServelhereNoch keine Bewertungen
- Livro Os NazarenosDokument21 SeitenLivro Os NazarenosWeberton HenriqueNoch keine Bewertungen
- Poema Falado - : Língua PortuguesaDokument19 SeitenPoema Falado - : Língua PortuguesadkauangoudNoch keine Bewertungen
- Lista de Aprovados PMDFDokument445 SeitenLista de Aprovados PMDF7z2hbgvpqxNoch keine Bewertungen