Das könnte Ihnen auch gefallen
- Working Paper: Electronic Money by Barbara A. GoodDokument72 SeitenWorking Paper: Electronic Money by Barbara A. GoodjejudoNoch keine Bewertungen
- Financial Action Task Force On Money Laundering: Annual Report 1996-1997Dokument91 SeitenFinancial Action Task Force On Money Laundering: Annual Report 1996-1997jejudoNoch keine Bewertungen
- Ideal Money and Asymptotically Ideal MoneyDokument8 SeitenIdeal Money and Asymptotically Ideal MoneySteven EdwardsNoch keine Bewertungen
- Ug 12Dokument232 SeitenUg 12Luis RodriguezNoch keine Bewertungen
- Money: Everyday EconomicsDokument20 SeitenMoney: Everyday Economicshello1 youNoch keine Bewertungen
- Money ManagementDokument39 SeitenMoney ManagementLouie F. Ramirez IINoch keine Bewertungen
- W 22533Dokument65 SeitenW 22533jejudoNoch keine Bewertungen
- OECD - Future of MoneyDokument171 SeitenOECD - Future of Money이영래Noch keine Bewertungen
- Prevalence of Selfie Addiction Among Junior College StudentsDokument4 SeitenPrevalence of Selfie Addiction Among Junior College StudentsjejudoNoch keine Bewertungen
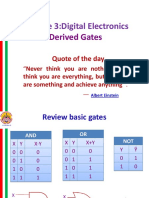
- Module 3:digital Electronics: Derived GatesDokument21 SeitenModule 3:digital Electronics: Derived GatesjejudoNoch keine Bewertungen
- Faculty Moodle ManualDokument48 SeitenFaculty Moodle Manualdiamond5000Noch keine Bewertungen
- PHYS 1100 DC Circuits SolutionsDokument14 SeitenPHYS 1100 DC Circuits SolutionsYihun TsegayeNoch keine Bewertungen
- Electric, Electrical, or ElectronicDokument3 SeitenElectric, Electrical, or ElectronicjejudoNoch keine Bewertungen
- RM 12Dokument1.098 SeitenRM 12Luis Rodriguez100% (1)
- Enhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesDokument24 SeitenEnhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesjejudoNoch keine Bewertungen
- On The Tight Formation For Multi-Agent Dynamical SystemsDokument12 SeitenOn The Tight Formation For Multi-Agent Dynamical SystemsjejudoNoch keine Bewertungen
- Sonar-Based Mobile Robot Navigation Through Supervised Learning On A Neural NetDokument20 SeitenSonar-Based Mobile Robot Navigation Through Supervised Learning On A Neural NetjejudoNoch keine Bewertungen
- Software PID Control of An Inverted Pendulum Using The PIC16F684Dokument14 SeitenSoftware PID Control of An Inverted Pendulum Using The PIC16F684Antony Charles TejadaNoch keine Bewertungen
- Predictive Control For Tight Group Formation of Multi-Agent SystemsDokument6 SeitenPredictive Control For Tight Group Formation of Multi-Agent SystemsjejudoNoch keine Bewertungen
- Path Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsDokument6 SeitenPath Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsjejudoNoch keine Bewertungen
- Matlab Tutorial1Dokument9 SeitenMatlab Tutorial1Asterix100% (6)
- SVE14A37CXHDokument2 SeitenSVE14A37CXHjejudoNoch keine Bewertungen
- A Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairDokument15 SeitenA Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairjejudoNoch keine Bewertungen
- Enhancements On The Hyperplane Arrangements in Mixed Integer TechniquesDokument6 SeitenEnhancements On The Hyperplane Arrangements in Mixed Integer TechniquesjejudoNoch keine Bewertungen
- Following A Wall by An Autonomous Mobile Robot With A Sonar-RingDokument8 SeitenFollowing A Wall by An Autonomous Mobile Robot With A Sonar-RingjejudoNoch keine Bewertungen
- Self-Localization Using Sporadic FeaturesDokument9 SeitenSelf-Localization Using Sporadic FeaturesjejudoNoch keine Bewertungen
- Mux CD4052Dokument14 SeitenMux CD4052neonavNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 1738 5944 1 PBDokument13 Seiten1738 5944 1 PBTrang HuyềnNoch keine Bewertungen
- IRT-Based Skills DiagnosisDokument19 SeitenIRT-Based Skills DiagnosisWan QENoch keine Bewertungen
- BRM PPT, 2021Dokument22 SeitenBRM PPT, 2021best OneNoch keine Bewertungen
- Donno Psaltis Zarpli Cmps FinalDokument23 SeitenDonno Psaltis Zarpli Cmps FinalCharisNoch keine Bewertungen
- Position PaperDokument43 SeitenPosition PaperyenkreshnaNoch keine Bewertungen
- Maine Alumnus Volume 12 Number 9 June 1931Dokument33 SeitenMaine Alumnus Volume 12 Number 9 June 1931isaac mensageiroNoch keine Bewertungen
- Recruitment & SelectionDokument49 SeitenRecruitment & SelectionDeepak Chauhan100% (2)
- Cab Aggregators StudyDokument14 SeitenCab Aggregators StudyJoydeepNandiNoch keine Bewertungen
- By Michael Hailu Advisor: Bahran Asrat (PHD)Dokument88 SeitenBy Michael Hailu Advisor: Bahran Asrat (PHD)Micheale HailuNoch keine Bewertungen
- Week 4Dokument8 SeitenWeek 4JAMES DARYLNoch keine Bewertungen
- Six SigmaDokument76 SeitenSix Sigmaali07Noch keine Bewertungen
- Geosoft's Master Communication PlanDokument4 SeitenGeosoft's Master Communication PlanAli RazaNoch keine Bewertungen
- Customer Incivility and Customer Problem-Solving Behaviour in Frontline Employees: Testing A Moderated Mediation ModelDokument20 SeitenCustomer Incivility and Customer Problem-Solving Behaviour in Frontline Employees: Testing A Moderated Mediation ModelHarris LaeequeNoch keine Bewertungen
- CTEbook Jojoba Complete OptDokument59 SeitenCTEbook Jojoba Complete OptSaif KhanNoch keine Bewertungen
- Assessing Damage After Disasters PDFDokument84 SeitenAssessing Damage After Disasters PDFVinayNoch keine Bewertungen
- Inteligencia de Negocios y Analítica de DatosDokument39 SeitenInteligencia de Negocios y Analítica de DatosfcojafetNoch keine Bewertungen
- IoT y Big Data 1Dokument9 SeitenIoT y Big Data 1roiber lopez del aguilaNoch keine Bewertungen
- Media and Information Opportunities Challenges: EconomicsDokument3 SeitenMedia and Information Opportunities Challenges: Economicszariyah levisteNoch keine Bewertungen
- Medical Male Circumcision: Do Women in Swaziland Welcome It For Their Sons and at What Age?Dokument4 SeitenMedical Male Circumcision: Do Women in Swaziland Welcome It For Their Sons and at What Age?COMDIS-HSDNoch keine Bewertungen
- Tourism Economic Impact GuideDokument32 SeitenTourism Economic Impact Guidehaffa100% (1)
- Effect of Learning Activity Package (Lap) On Students' Achievement and Retention in Senior Secondary School BiologyDokument55 SeitenEffect of Learning Activity Package (Lap) On Students' Achievement and Retention in Senior Secondary School Biologyjamessabraham2Noch keine Bewertungen
- Descriptive criticism seeks factual understandingDokument32 SeitenDescriptive criticism seeks factual understandingSINTHA DEWI PUSPA HANDOKONoch keine Bewertungen
- Doi Suppl 10.1142 7420 Suppl File 7420 Chap01Dokument81 SeitenDoi Suppl 10.1142 7420 Suppl File 7420 Chap01xyz_universeNoch keine Bewertungen
- The Godfrey's Children Center Idweli, Tanzania Evaluation of ADokument54 SeitenThe Godfrey's Children Center Idweli, Tanzania Evaluation of Aapi-9637469Noch keine Bewertungen
- Making Effective Presentations at Professional ConferenceDokument127 SeitenMaking Effective Presentations at Professional ConferenceAbdulaziz ShaherNoch keine Bewertungen
- AccentureDokument2 SeitenAccentureSalomé ZhvaniaNoch keine Bewertungen
- Probability PlotDokument17 SeitenProbability PlotCharmianNoch keine Bewertungen
- Examiners' Report June 2018: IAL Arabic WAA02 01Dokument40 SeitenExaminers' Report June 2018: IAL Arabic WAA02 01Rafa67% (3)
- Learning Organization - RobiDokument30 SeitenLearning Organization - RobiRuhin Afrin JoyeeNoch keine Bewertungen
- 1 Toke 2019Dokument9 Seiten1 Toke 2019jasvinder singhNoch keine Bewertungen