Das könnte Ihnen auch gefallen
- Manual Diseño y Construcción Mallas Conectadas TierraDokument12 SeitenManual Diseño y Construcción Mallas Conectadas TierraGab_SandovalR7175Noch keine Bewertungen
- MTTplus Emanual D07-00-096P RevA01 PDFDokument66 SeitenMTTplus Emanual D07-00-096P RevA01 PDF2012nearNoch keine Bewertungen
- Data Comm. & NetworkDokument139 SeitenData Comm. & NetworkAkash SachanNoch keine Bewertungen
- SIU Manual DatabuildDokument17 SeitenSIU Manual Databuildbrightmsfstar100% (1)
- ULG2415Dokument8 SeitenULG2415remmymathNoch keine Bewertungen
- Script To Get PM Data Ericsson PlatformDokument9 SeitenScript To Get PM Data Ericsson PlatformRaphaelNoch keine Bewertungen
- Recovery Node From Emergency SituationDokument12 SeitenRecovery Node From Emergency SituationbintangNoch keine Bewertungen
- MPLS-TP Technology OverviewDokument30 SeitenMPLS-TP Technology OverviewAniket SawantNoch keine Bewertungen
- RBS6000 Integration and Commissioning MOP - AirtelNE - V1Dokument33 SeitenRBS6000 Integration and Commissioning MOP - AirtelNE - V1YacoubaNoch keine Bewertungen
- How To Download Terrain For Pathloss 4 &5Dokument4 SeitenHow To Download Terrain For Pathloss 4 &5KLNoch keine Bewertungen
- GSM OSS Commands: Agonafir Ayele SER So-Em 10.206.115.198 Etagoaye Ethio12345Dokument2 SeitenGSM OSS Commands: Agonafir Ayele SER So-Em 10.206.115.198 Etagoaye Ethio12345Ayele MitkuNoch keine Bewertungen
- SME PPT TCU02 Technical DescriptionDokument23 SeitenSME PPT TCU02 Technical DescriptionabhinavNoch keine Bewertungen
- Chapter 3 Large Scale PathlossDokument41 SeitenChapter 3 Large Scale PathlossNebil AregaNoch keine Bewertungen
- Inter Vlan Routing Through L3 SwitchDokument5 SeitenInter Vlan Routing Through L3 SwitchSyed Mohammad AliNoch keine Bewertungen
- Pathloss 4.0 & MW Link Planning Part 2Dokument41 SeitenPathloss 4.0 & MW Link Planning Part 2Dimas RioNoch keine Bewertungen
- Gestion Outband e InbandwithsecDokument28 SeitenGestion Outband e InbandwithseclealcontoNoch keine Bewertungen
- How To Create MW Network Topology in MapinfoDokument11 SeitenHow To Create MW Network Topology in MapinfojaomiaNoch keine Bewertungen
- Lte Enodeb: Finn Magnusson 2011-06-02 Rev PA20Dokument187 SeitenLte Enodeb: Finn Magnusson 2011-06-02 Rev PA20tonu gulluNoch keine Bewertungen
- Transmission System CodeDokument79 SeitenTransmission System CodeSaleem100% (1)
- ActiveAlarms MGW MSS HLR 27-12-2017 08 12 37Dokument258 SeitenActiveAlarms MGW MSS HLR 27-12-2017 08 12 37Nino BongoyNoch keine Bewertungen
- Python ENM Scripting Access TipsDokument6 SeitenPython ENM Scripting Access Tipsjyam04Noch keine Bewertungen
- Asr9k Mpls Config GuideDokument280 SeitenAsr9k Mpls Config GuideMaulik ShethNoch keine Bewertungen
- How To Compile MapWinGIS - Ocx and Create An OCX-Only InstallerDokument4 SeitenHow To Compile MapWinGIS - Ocx and Create An OCX-Only InstallerChandra WijayaNoch keine Bewertungen
- GPRS OverviewDokument184 SeitenGPRS Overviewreports VAD100% (1)
- DUW Software Upgrade ProcedureDokument2 SeitenDUW Software Upgrade ProcedureanwarNoch keine Bewertungen
- EtherAssure NetComplete Training - Session 2a - User - NGT RFC2544-Y1564Dokument145 SeitenEtherAssure NetComplete Training - Session 2a - User - NGT RFC2544-Y1564testato123100% (1)
- Alcatel MW Software Installation & CommissioningDokument49 SeitenAlcatel MW Software Installation & Commissioningmohsinaliqureshi02Noch keine Bewertungen
- Mixedmode ComandosDokument13 SeitenMixedmode ComandosJulio Emmanuel Rodriguez Selva100% (1)
- Practical Look at MapWindowsDokument316 SeitenPractical Look at MapWindowsEddy PrahastaNoch keine Bewertungen
- Procedure For Replacing DUW - NodeB With Dual DUW PDFDokument15 SeitenProcedure For Replacing DUW - NodeB With Dual DUW PDFKevin AverruzNoch keine Bewertungen
- Atoll 3.1.0 User Manual Radio E1Dokument1.624 SeitenAtoll 3.1.0 User Manual Radio E1thanhbdt67% (3)
- Installation & Commissioning: Layan MadukaDokument23 SeitenInstallation & Commissioning: Layan MadukanahussainNoch keine Bewertungen
- Tes PingDokument1 SeiteTes PingbintangNoch keine Bewertungen
- M-MGw R2 basics workshop call flows and device selectionDokument25 SeitenM-MGw R2 basics workshop call flows and device selectionVeton MustafaNoch keine Bewertungen
- C# Program To Calculate The Distance Between Two Points in 2d and 3dDokument103 SeitenC# Program To Calculate The Distance Between Two Points in 2d and 3dchineduiroanyah100% (1)
- User Guide J2me Sony-Ericsson 2004Dokument134 SeitenUser Guide J2me Sony-Ericsson 2004ioan_vNoch keine Bewertungen
- MX Series Line Card GuideDokument180 SeitenMX Series Line Card GuideVictor DiazNoch keine Bewertungen
- Upgrade TDM1001 in UbootDokument9 SeitenUpgrade TDM1001 in UbootAbdul GhaffarNoch keine Bewertungen
- Wireless J2ME™ Platform ProgrammingDokument305 SeitenWireless J2ME™ Platform ProgrammingYuhariz AldyanNoch keine Bewertungen
- Ethernet 9500 MPDokument486 SeitenEthernet 9500 MPIvan José Campos MadridNoch keine Bewertungen
- Assisted Radio Ion - Telcofan Lieven VanthommeDokument19 SeitenAssisted Radio Ion - Telcofan Lieven VanthommevanthommeNoch keine Bewertungen
- ITU-T Y.1564 Ethernet Link TestDokument29 SeitenITU-T Y.1564 Ethernet Link TestkeepunmeNoch keine Bewertungen
- NetWorker 9.0 Performance Optimization Planning GuideDokument80 SeitenNetWorker 9.0 Performance Optimization Planning GuideRaviNoch keine Bewertungen
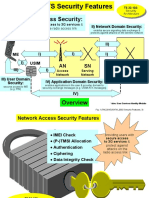
- I) Network Access Security:: HE SN ANDokument22 SeitenI) Network Access Security:: HE SN ANBassem AbouamerNoch keine Bewertungen
- Linux Bash Shell Cheat SheetDokument7 SeitenLinux Bash Shell Cheat Sheetvladimir1923Noch keine Bewertungen
- NN10300036UA08.1 - V1 - Alcatel-Lucent 9353 Wireless Management System - Workstation Client Application InstallationDokument64 SeitenNN10300036UA08.1 - V1 - Alcatel-Lucent 9353 Wireless Management System - Workstation Client Application InstallationAmrit Aulakh0% (1)
- GView UNMS Quick Start Guide-Guangda EPON NMSDokument46 SeitenGView UNMS Quick Start Guide-Guangda EPON NMSSPC INTERNETNoch keine Bewertungen
- User ManualDokument495 SeitenUser ManualKevin Kennedy Castillo AlvaradoNoch keine Bewertungen
- ZXUR 9000 UMTS (V4.12.10) Radio Network Controller Radio Parameter Reference - 522769Dokument1.254 SeitenZXUR 9000 UMTS (V4.12.10) Radio Network Controller Radio Parameter Reference - 522769naleen buddhika83% (6)
- Extreme Networks Summit 400-48Dokument1.194 SeitenExtreme Networks Summit 400-48hdinformatica100% (1)
- Comparison of Atoll Planet For LTEDokument16 SeitenComparison of Atoll Planet For LTElahyouhNoch keine Bewertungen
- Cordex CXC HP Controller Software Manual PDFDokument236 SeitenCordex CXC HP Controller Software Manual PDFJose Pino100% (1)
- r007 MTS-5800 GettingStartedGuideDokument178 Seitenr007 MTS-5800 GettingStartedGuideNtibileng MoloiNoch keine Bewertungen
- Performance Counters R3.1Dokument102 SeitenPerformance Counters R3.1Hector SolarteNoch keine Bewertungen
- Application Note 130 RFC-2544 Testing PDFDokument46 SeitenApplication Note 130 RFC-2544 Testing PDFRaphael Galvao0% (1)
- Manual Rádio SIAEDokument324 SeitenManual Rádio SIAERicardi Martinelli MartinsNoch keine Bewertungen
- Introduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GVon EverandIntroduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GNoch keine Bewertungen
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeVon EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiNoch keine Bewertungen
- MathWorks - Phased Array System Toolbox™ 1 Getting Started GuideDokument44 SeitenMathWorks - Phased Array System Toolbox™ 1 Getting Started GuideHomero Ruiz HernandezNoch keine Bewertungen
- Traffic Light Detection for Autonomous VehiclesDokument8 SeitenTraffic Light Detection for Autonomous VehiclesGuang ChenNoch keine Bewertungen
- Image Scaling Using Deep Convolutional Neural Networks - Flipboard EngineeringDokument13 SeitenImage Scaling Using Deep Convolutional Neural Networks - Flipboard EngineeringGuang ChenNoch keine Bewertungen
- Resources for German language learningDokument4 SeitenResources for German language learningGuang Chen0% (1)
- Rain EffectDokument30 SeitenRain EffectmsmaraiNoch keine Bewertungen
- GQM Application CloudComputingDokument6 SeitenGQM Application CloudComputingGuang ChenNoch keine Bewertungen
- FM Radar - 2014Dokument36 SeitenFM Radar - 2014Guang ChenNoch keine Bewertungen
- Phased Array BookDokument362 SeitenPhased Array BookGuang ChenNoch keine Bewertungen
- 79Ghz Band Ultra-Wideband Automotive Radar: Katsuyuki Ohguchi Masayoshi Shono Masayuki KishidaDokument6 Seiten79Ghz Band Ultra-Wideband Automotive Radar: Katsuyuki Ohguchi Masayoshi Shono Masayuki KishidaGuang ChenNoch keine Bewertungen
- Radar Presentation From FreescaleDokument34 SeitenRadar Presentation From FreescaleGuang ChenNoch keine Bewertungen
- 10 Detection of Signals in NoiseDokument20 Seiten10 Detection of Signals in NoisekirankumarrathNoch keine Bewertungen
- The Goal Question Metric ApproachDokument14 SeitenThe Goal Question Metric ApproachGuang ChenNoch keine Bewertungen
- Unit 12.2 RNA Secondary Structure Analysis Using The Vienna RNA PackageDokument12 SeitenUnit 12.2 RNA Secondary Structure Analysis Using The Vienna RNA PackageGuang ChenNoch keine Bewertungen
- Laser Radar Detection Statistics A Comparison of Coherent and Direct-Detection ReceiversDokument12 SeitenLaser Radar Detection Statistics A Comparison of Coherent and Direct-Detection ReceiversGuang ChenNoch keine Bewertungen
- Image Super-Resolution Using Deep Convolutional NetworksDokument14 SeitenImage Super-Resolution Using Deep Convolutional NetworksGuang ChenNoch keine Bewertungen
- AD8000 Bench Meter User ManualDokument60 SeitenAD8000 Bench Meter User ManualMarcelo RoccoNoch keine Bewertungen
- Microprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerDokument13 SeitenMicroprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerPrayNoch keine Bewertungen
- Small Network Management ProtocolDokument15 SeitenSmall Network Management ProtocolJasonNoch keine Bewertungen
- XP Series Parts ListDokument45 SeitenXP Series Parts ListspirisNoch keine Bewertungen
- MSI Motherboard Manual For B360M PRO-VD/ B360M PRO-VH/ B360M ICAFE/ B360M FIRE/ B360M WINDDokument150 SeitenMSI Motherboard Manual For B360M PRO-VD/ B360M PRO-VH/ B360M ICAFE/ B360M FIRE/ B360M WINDgilipterotNoch keine Bewertungen
- Mastercam2018 Tool Manager TutorialDokument100 SeitenMastercam2018 Tool Manager TutorialgurdeeNoch keine Bewertungen
- Maxtor M3 Portable - User Manual-EN - E01 - 19 05 2016 PDFDokument22 SeitenMaxtor M3 Portable - User Manual-EN - E01 - 19 05 2016 PDFAhmad ElsheemyNoch keine Bewertungen
- What Is RouterboardDokument35 SeitenWhat Is Routerboardnic123456456Noch keine Bewertungen
- Mikroc ManualDokument391 SeitenMikroc ManualtoredaNoch keine Bewertungen
- VHD InstallDokument2 SeitenVHD InstalljmedvedNoch keine Bewertungen
- 8997 1078 00 List of PartsDokument37 Seiten8997 1078 00 List of PartsAndres RodriguezNoch keine Bewertungen
- 200w Power SupplyDokument4 Seiten200w Power SupplySungyong SohnNoch keine Bewertungen
- Verification OverviewDokument123 SeitenVerification OverviewSamNoch keine Bewertungen
- OMNI 3000 6000 Specification SheetDokument16 SeitenOMNI 3000 6000 Specification SheetLuis Guillermo De Sousa PáezNoch keine Bewertungen
- DX DiagDokument31 SeitenDX DiagJhon SaucedoNoch keine Bewertungen
- Digital ClockDokument6 SeitenDigital ClockAlex Xander AcayenNoch keine Bewertungen
- Catalogue Measuring Instruments ISKRADokument110 SeitenCatalogue Measuring Instruments ISKRAArmin KadragicNoch keine Bewertungen
- Substation Bus SchemesDokument8 SeitenSubstation Bus Schemesabhi_tricalNoch keine Bewertungen
- COVEC F Service ManualDokument55 SeitenCOVEC F Service ManualanshelNoch keine Bewertungen
- iRC2570 31xx Series-PmDokument178 SeiteniRC2570 31xx Series-Pmswarajshoban100% (1)
- Parts Catalog for Yanmar Diesel Engine Cylinder ComponentsDokument28 SeitenParts Catalog for Yanmar Diesel Engine Cylinder ComponentsFILO7433% (3)
- Data Sheet ZNX:EIP-200S: General InformationDokument2 SeitenData Sheet ZNX:EIP-200S: General InformationVasile TothNoch keine Bewertungen
- Narrative Report On School Training/Demo and Acceptance of DCP E-PackageDokument6 SeitenNarrative Report On School Training/Demo and Acceptance of DCP E-PackageYca Nebres IbarrientosNoch keine Bewertungen
- LG 42PC55 Service ManualDokument54 SeitenLG 42PC55 Service ManualThomas Oldbury100% (1)
- DM311 FSDM311 Green Mode Power Switch (FPSTM) PDFDokument19 SeitenDM311 FSDM311 Green Mode Power Switch (FPSTM) PDFKrista TranNoch keine Bewertungen
- Unit - 5 - QB - Assignment - Real World Interfacing With Cortex M4 Based MicrocontrollerDokument2 SeitenUnit - 5 - QB - Assignment - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNoch keine Bewertungen
- D - PneumaticsDokument14 SeitenD - Pneumaticsleena175Noch keine Bewertungen
- Introduction To Oracle Database ApplianceDokument4 SeitenIntroduction To Oracle Database ApplianceAmr MohammedNoch keine Bewertungen
- IPLINFODokument61 SeitenIPLINFOabhinavs_95Noch keine Bewertungen