Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Des AntiDokument11 SeitenDes Antitatomirlucian100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- CADokument1 SeiteCAEdgar GuerreroNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Cardiovasc Res-2013-Quinn-601-11 PDFDokument11 SeitenCardiovasc Res-2013-Quinn-601-11 PDFEdgar GuerreroNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 1 s2.0 S0957415899000082 MainDokument17 Seiten1 s2.0 S0957415899000082 MainEdgar GuerreroNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 1 s2.0 S0196890413005402 MainDokument8 Seiten1 s2.0 S0196890413005402 MainEdgar GuerreroNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- 1 s2.0 S0196890413005402 MainDokument8 Seiten1 s2.0 S0196890413005402 MainEdgar GuerreroNoch keine Bewertungen
- A Mechatronic Analysis and Synthesis of Human Walking GaitDokument6 SeitenA Mechatronic Analysis and Synthesis of Human Walking GaitEdgar GuerreroNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- 00529793Dokument5 Seiten00529793Edgar GuerreroNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 1 s2.0 S0022489814000147 MainDokument18 Seiten1 s2.0 S0022489814000147 MainEdgar GuerreroNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Modified Dynamic Model of The HumanDokument14 SeitenA Modified Dynamic Model of The HumanEdgar GuerreroNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Biomechanical Study of Lower Limb During Human WalkingDokument9 SeitenThe Biomechanical Study of Lower Limb During Human WalkingEdgar GuerreroNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Mathematical Model For The Dynamics of Human LocomotionDokument8 SeitenA Mathematical Model For The Dynamics of Human LocomotionEdgar GuerreroNoch keine Bewertungen
- Airbus Cryoplane PDFDokument34 SeitenAirbus Cryoplane PDFGökhan KaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Brochure XE215SLLDokument2 SeitenBrochure XE215SLLFernanda RizaldoNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Murder Crime Scene TranscriptDokument2 SeitenMurder Crime Scene TranscriptLowell AlfonsoNoch keine Bewertungen
- MRF Tyres: Presented byDokument33 SeitenMRF Tyres: Presented byRajneesh Sharma50% (4)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- SI1290F Crankcase Thru-Stud Locations, Repair of Oil LeakageDokument7 SeitenSI1290F Crankcase Thru-Stud Locations, Repair of Oil Leakagedavid100% (1)
- Guntner Heat Exchangers: ... Keep(s) Your QualityDokument8 SeitenGuntner Heat Exchangers: ... Keep(s) Your QualityDimas TorrealbaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
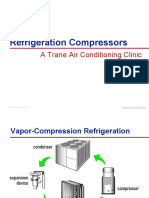
- Refrigeration Compressors: A Trane Air Conditioning ClinicDokument55 SeitenRefrigeration Compressors: A Trane Air Conditioning ClinicMohamad ArisNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Epiroc BC3700 Bucket CrusherDokument36 SeitenEpiroc BC3700 Bucket Crusherstephane.gueguenNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- AsDokument85 SeitenAsPaitlaukNoch keine Bewertungen
- Brake Caliper HW 040 HFA: Hydraulically Activated - Spring ReleasedDokument1 SeiteBrake Caliper HW 040 HFA: Hydraulically Activated - Spring Releasedsrpk serverNoch keine Bewertungen
- MD4 CalibrationDokument25 SeitenMD4 CalibrationPalm House CoffeeNoch keine Bewertungen
- Audi A1, A Success Story: © CCMP 2017Dokument12 SeitenAudi A1, A Success Story: © CCMP 2017MArieNoch keine Bewertungen
- Screenshot 2023-09-06 at 10.24.31 AMDokument162 SeitenScreenshot 2023-09-06 at 10.24.31 AMp9mn4tftqxNoch keine Bewertungen
- PMS Practical 01 PDFDokument12 SeitenPMS Practical 01 PDFGest Account 08Noch keine Bewertungen
- 13 INSP 0013 MultiWheel Roller CheckDokument1 Seite13 INSP 0013 MultiWheel Roller CheckBarock NaturelNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Harley Davidson: Motorcycle Manufacturer or Financing Company? Case StudyDokument5 SeitenHarley Davidson: Motorcycle Manufacturer or Financing Company? Case StudyHarsh MNoch keine Bewertungen
- Course: SCM 450 Section: 01 Group: 04 Summer 2020 Date of Submission: 26 September, 2020Dokument20 SeitenCourse: SCM 450 Section: 01 Group: 04 Summer 2020 Date of Submission: 26 September, 2020amena aktar MimNoch keine Bewertungen
- Mitsubishi 4g92 Engine Manual PDFDokument2 SeitenMitsubishi 4g92 Engine Manual PDFMohammed Hanafi60% (5)
- 2012 Audi A4 s4 ManualDokument310 Seiten2012 Audi A4 s4 ManualNorberto MonárrezNoch keine Bewertungen
- QuestionnaireDokument7 SeitenQuestionnaireaarthi100% (2)
- Blue Strobe LightDokument2 SeitenBlue Strobe LightAle MuNoch keine Bewertungen
- Fichas Fanfaro - 10KDokument53 SeitenFichas Fanfaro - 10Koscar baezNoch keine Bewertungen
- Ariel JGE JGH JGK JGT Manual - 231029 - 233805Dokument203 SeitenAriel JGE JGH JGK JGT Manual - 231029 - 233805Daniel LatorreNoch keine Bewertungen
- Stagecoach East Midlands: (PB0001484, PF0001611, PF0007038)Dokument18 SeitenStagecoach East Midlands: (PB0001484, PF0001611, PF0007038)Nathan AmaizeNoch keine Bewertungen
- 45 Export - Acetylene PlantDokument8 Seiten45 Export - Acetylene PlantBilel AzzouniNoch keine Bewertungen
- 03 Indicator DiagramDokument37 Seiten03 Indicator DiagramnareshNoch keine Bewertungen
- HETRONIC MEC-HL C INSTALLATION MANUAL (Eng) PDFDokument26 SeitenHETRONIC MEC-HL C INSTALLATION MANUAL (Eng) PDFAndzej Lazovskij100% (1)
- Lesson 4 - Applying Pascal'S: Example 1Dokument5 SeitenLesson 4 - Applying Pascal'S: Example 1Hafizuddin DaudNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 2017 Kawasaki Z125 Owners ManualDokument152 Seiten2017 Kawasaki Z125 Owners ManualWrathfulSlotNoch keine Bewertungen