Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Books QuotationDokument1 SeiteBooks QuotationSoumyabrata BarikNoch keine Bewertungen
- Electrical Machines: Tutorial: TransformerDokument12 SeitenElectrical Machines: Tutorial: TransformerSoumyabrata BarikNoch keine Bewertungen
- Identification - ISP Model - AlgoDokument1 SeiteIdentification - ISP Model - AlgoSoumyabrata BarikNoch keine Bewertungen
- Part-A Solution KeysDokument1 SeitePart-A Solution KeysSoumyabrata BarikNoch keine Bewertungen
- 4.3 Application of DP To The Energy Management Problem in Hevs 45Dokument1 Seite4.3 Application of DP To The Energy Management Problem in Hevs 45Soumyabrata BarikNoch keine Bewertungen
- Evangelopoulos2014 PDFDokument12 SeitenEvangelopoulos2014 PDFSoumyabrata BarikNoch keine Bewertungen
- Renewable Energy: S. Shargh, B. Khorshid Ghazani, B. Mohammadi-Ivatloo, H. Seyedi, M. AbapourDokument12 SeitenRenewable Energy: S. Shargh, B. Khorshid Ghazani, B. Mohammadi-Ivatloo, H. Seyedi, M. AbapourSoumyabrata BarikNoch keine Bewertungen
- Powerworld Test-1: P P Q QDokument2 SeitenPowerworld Test-1: P P Q QSoumyabrata BarikNoch keine Bewertungen
- Investigation of Schemes For Incorporating Generator Q Limits in The Fast Decoupled Load Flow MethodDokument14 SeitenInvestigation of Schemes For Incorporating Generator Q Limits in The Fast Decoupled Load Flow MethodSoumyabrata BarikNoch keine Bewertungen
- Optimal Placement & Sizing of Distributed Generator (DG) : Chapter - 5Dokument24 SeitenOptimal Placement & Sizing of Distributed Generator (DG) : Chapter - 5Soumyabrata BarikNoch keine Bewertungen
- Ieee RTS 24 PDFDokument5 SeitenIeee RTS 24 PDFJoshNoch keine Bewertungen
- MPI Godse TextBookDokument606 SeitenMPI Godse TextBookRam50% (2)
- VeergathaDokument160 SeitenVeergathaSoumyabrata BarikNoch keine Bewertungen
- Improving Voltage Profile of Residential Distribution Systems Using Rooftop PVs and Battery Energy Storage SystemsDokument11 SeitenImproving Voltage Profile of Residential Distribution Systems Using Rooftop PVs and Battery Energy Storage SystemsSoumyabrata BarikNoch keine Bewertungen
- From Bus To Bus Y/2 Ir Pl (Kw) Resistance (Ώ) Reactance (Ώ)Dokument4 SeitenFrom Bus To Bus Y/2 Ir Pl (Kw) Resistance (Ώ) Reactance (Ώ)Soumyabrata BarikNoch keine Bewertungen
- Clean Tile Problem - From Wolfram MathWorldDokument4 SeitenClean Tile Problem - From Wolfram MathWorldSoumyabrata BarikNoch keine Bewertungen
- Email: Research Area: Power System Dynamics & Stability, Genetic Algorithm, FlexibleDokument1 SeiteEmail: Research Area: Power System Dynamics & Stability, Genetic Algorithm, FlexibleSoumyabrata BarikNoch keine Bewertungen
- MPI Godse TextBookDokument606 SeitenMPI Godse TextBookRam50% (2)
- MainDokument2 SeitenMainSoumyabrata BarikNoch keine Bewertungen
- Basic Electrical Engineering by U.A BakshiDokument625 SeitenBasic Electrical Engineering by U.A BakshiEngr. Abdul Qayyum100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
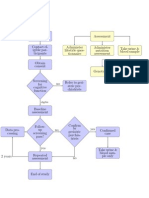
- C++ Project For Graphic Scientific CalculatorDokument34 SeitenC++ Project For Graphic Scientific CalculatorManish DeyNoch keine Bewertungen
- Test Data Management SoftwareDokument12 SeitenTest Data Management SoftwareNNiveditaNoch keine Bewertungen
- MNED G12MNEDMockP22017MemoDokument11 SeitenMNED G12MNEDMockP22017MemoChey1242Noch keine Bewertungen
- MechEngPulseJet ExperimentsDokument68 SeitenMechEngPulseJet ExperimentsoffgridsidNoch keine Bewertungen
- Siesta TutorialDokument14 SeitenSiesta TutorialCharles Marcotte GirardNoch keine Bewertungen
- Diagnostic Trouble Code Index AllisonDokument16 SeitenDiagnostic Trouble Code Index AllisonLuis Gongora100% (6)
- Chan SHP Final-NolinksDokument3 SeitenChan SHP Final-NolinksaliNoch keine Bewertungen
- 634904411345780000Dokument24 Seiten634904411345780000chintan kapadiaNoch keine Bewertungen
- In Context: Subject Area: Organic Chemistry Level: 14-16 Years (Higher) Topic: Addition Polymers Source: RSC - Li/2GrwsijDokument5 SeitenIn Context: Subject Area: Organic Chemistry Level: 14-16 Years (Higher) Topic: Addition Polymers Source: RSC - Li/2GrwsijRajlaxmi JainNoch keine Bewertungen
- Alfred Sds ProjectDokument10 SeitenAlfred Sds ProjectMr TuchelNoch keine Bewertungen
- Strion Led HL - SupDokument2 SeitenStrion Led HL - SupPatrickNoch keine Bewertungen
- RC2 22873Dokument2 SeitenRC2 22873Henok AlemayehuNoch keine Bewertungen
- Regenerative Braking SystemDokument27 SeitenRegenerative Braking Systemapi-1977578380% (5)
- 18 DiplexorDokument3 Seiten18 DiplexorFernando GutiérrezNoch keine Bewertungen
- Colgate PalmoliveDokument8 SeitenColgate PalmoliveRahul MaddikuntaNoch keine Bewertungen
- Anatomy of GallbladderDokument14 SeitenAnatomy of GallbladderSamridhi DawadiNoch keine Bewertungen
- Jib Cranes 20875644 Colour CatalogueDokument30 SeitenJib Cranes 20875644 Colour Cataloguepsingh1996Noch keine Bewertungen
- Week 8-Wind Energy Generation - ELEC2300Dokument29 SeitenWeek 8-Wind Energy Generation - ELEC2300Look AxxNoch keine Bewertungen
- Interleaved Memory Organisation, Associative MemoDokument19 SeitenInterleaved Memory Organisation, Associative MemoGourav SallaNoch keine Bewertungen
- Water Cooled Chiller (SHUBAILY GRAND MALL)Dokument40 SeitenWater Cooled Chiller (SHUBAILY GRAND MALL)kdpmansiNoch keine Bewertungen
- Fiat Bravo Training ManualDokument111 SeitenFiat Bravo Training ManualJa Ja75% (4)
- Precision 10 40 Operating InstructionsDokument27 SeitenPrecision 10 40 Operating InstructionsDaniel PeluffoNoch keine Bewertungen
- D82167GC10-Practices For Lesson 8Dokument36 SeitenD82167GC10-Practices For Lesson 8ChristianQuirozPlefkeNoch keine Bewertungen
- Chapter 08Dokument30 SeitenChapter 08MaxNoch keine Bewertungen
- Design and Analysis of Single Patch Antenna For Radar ApplicationsDokument4 SeitenDesign and Analysis of Single Patch Antenna For Radar ApplicationsInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Length Standards EngDokument1 SeiteLength Standards EngAsif Hameed100% (2)
- Changes Around Us Science - Class-ViDokument28 SeitenChanges Around Us Science - Class-ViAmit SharmaNoch keine Bewertungen
- DV-08-UK (Oct-07)Dokument28 SeitenDV-08-UK (Oct-07)hepcomotionNoch keine Bewertungen
- Physical and Chemical Properties of Crude Oil and Oil ProductsDokument10 SeitenPhysical and Chemical Properties of Crude Oil and Oil ProductsEnegineer HusseinNoch keine Bewertungen
- Air Vent Heads DNV 2003 PDFDokument7 SeitenAir Vent Heads DNV 2003 PDFBhargav PatelNoch keine Bewertungen