Das könnte Ihnen auch gefallen
- Presented © January 2011 by Charles Savoie An Initiative To Protect Private Property Rights of American CitizensDokument449 SeitenPresented © January 2011 by Charles Savoie An Initiative To Protect Private Property Rights of American CitizensmmnnnnNoch keine Bewertungen
- The Banking Cartel Is Trying To Steal Jewels Out of The Global Debt FacilityDokument8 SeitenThe Banking Cartel Is Trying To Steal Jewels Out of The Global Debt Facilitykaren hudes100% (3)
- Centrifugal CastingDokument266 SeitenCentrifugal Castinguzairmetallurgist100% (2)
- The Destruction of The Irish Economy by Jeremy JamesDokument83 SeitenThe Destruction of The Irish Economy by Jeremy JamesJeremy JamesNoch keine Bewertungen
- Contractor Search ReportDokument10 SeitenContractor Search ReportjavenacostaNoch keine Bewertungen
- The Northwest Technocrat, by Technocracy, Inc. 1946Dokument26 SeitenThe Northwest Technocrat, by Technocracy, Inc. 1946OK-SAFE, Inc.Noch keine Bewertungen
- Pujo Committee 2Dokument3 SeitenPujo Committee 2Keith KnightNoch keine Bewertungen
- Jet Bit Nozzle Size SelectionDokument46 SeitenJet Bit Nozzle Size SelectionBharat BhattaraiNoch keine Bewertungen
- Tensile Strength of Mass Concrete 913-938 PDFDokument28 SeitenTensile Strength of Mass Concrete 913-938 PDFchutton681Noch keine Bewertungen
- Control System (136-248) PDFDokument113 SeitenControl System (136-248) PDFmuruganNoch keine Bewertungen
- Transfer of PowerDokument15 SeitenTransfer of PowerJimmy Makiling PamugasNoch keine Bewertungen
- Russia's Plans to Nearly Double Nuclear Output by 2020Dokument20 SeitenRussia's Plans to Nearly Double Nuclear Output by 2020Aleksey ArtemyevNoch keine Bewertungen
- Chapter 6. ThermodynamicsDokument7 SeitenChapter 6. Thermodynamicshoney1002Noch keine Bewertungen
- Essentials of the Finite Element Method: For Mechanical and Structural EngineersVon EverandEssentials of the Finite Element Method: For Mechanical and Structural EngineersBewertung: 3.5 von 5 Sternen3.5/5 (9)
- America's Power Rises as Grand Coulee Dam Comes OnlineDokument24 SeitenAmerica's Power Rises as Grand Coulee Dam Comes OnlineCapri KiousNoch keine Bewertungen
- Soft Robotics An OverviewDokument7 SeitenSoft Robotics An OverviewEditor IJTSRDNoch keine Bewertungen
- NMR - WATER Exploration, Presentation - Water - ProjectDokument35 SeitenNMR - WATER Exploration, Presentation - Water - Projectmichel louis friedmanNoch keine Bewertungen
- Technocracy - A Totalitarian Fantasy (1944)Dokument27 SeitenTechnocracy - A Totalitarian Fantasy (1944)antoniojoseespNoch keine Bewertungen
- Review Beer AgeingDokument25 SeitenReview Beer AgeingTimothy WestNoch keine Bewertungen
- ITC - Chat Log 12.4.2019Dokument6 SeitenITC - Chat Log 12.4.2019Lee RainbowNoch keine Bewertungen
- 3d Printing Soft Materials What Is PossibleDokument4 Seiten3d Printing Soft Materials What Is PossibleArieza PerdhanaNoch keine Bewertungen
- Study Course PDFDokument295 SeitenStudy Course PDFSiv BibiNoch keine Bewertungen
- Quick Revision of Bio Phy Che 9 HoursDokument489 SeitenQuick Revision of Bio Phy Che 9 Hourscbsegirlsaipmt100% (2)
- Central Bank Digital Currency Opportunities Challenges and DesignDokument57 SeitenCentral Bank Digital Currency Opportunities Challenges and DesignLudovicoNoch keine Bewertungen
- The Paradox of Social Class and Sports InvolvementDokument13 SeitenThe Paradox of Social Class and Sports Involvementq12werty100% (1)
- Managing Co-Branding Strategies: Global Brands Into Local MarketsDokument8 SeitenManaging Co-Branding Strategies: Global Brands Into Local Marketsq12wertyNoch keine Bewertungen
- 3D Printing of Robotic Soft Actuators WithDokument9 Seiten3D Printing of Robotic Soft Actuators WithPringgo Widyo LaksonoNoch keine Bewertungen
- Signals and Systems With MATLAB Computing and Simulink ModelingDokument687 SeitenSignals and Systems With MATLAB Computing and Simulink ModelingRanne ManuelNoch keine Bewertungen
- As We Accept The Proclamation and Gift of Love From José Rizal and Ferdinand Marcos Twitter12.26.18Dokument13 SeitenAs We Accept The Proclamation and Gift of Love From José Rizal and Ferdinand Marcos Twitter12.26.18karen hudesNoch keine Bewertungen
- Rebranding and Impact Toward Brand Equity: Goi Mei TehDokument14 SeitenRebranding and Impact Toward Brand Equity: Goi Mei Tehowaiskhan_M100% (1)
- Letter Plum BlossomDokument1 SeiteLetter Plum BlossomArturo VillarragaNoch keine Bewertungen
- Design and Analysis of G+8 Commercial Building Using Staad ProDokument8 SeitenDesign and Analysis of G+8 Commercial Building Using Staad ProVikaskumar ReddyNoch keine Bewertungen
- Design, Fabrication and Control of Soft RobotsDokument24 SeitenDesign, Fabrication and Control of Soft RobotsSagar JoshiNoch keine Bewertungen
- Strategic Corporate Social Responsibility As Global Brand InsuranceDokument8 SeitenStrategic Corporate Social Responsibility As Global Brand Insuranceq12wertyNoch keine Bewertungen
- How Geoengineering Threatens To Entrench Fossil Fuels and Accelerate The Climate Crisis - Feb 2019 PDFDokument78 SeitenHow Geoengineering Threatens To Entrench Fossil Fuels and Accelerate The Climate Crisis - Feb 2019 PDFdcanarteNoch keine Bewertungen
- Technocracy Study CourseDokument305 SeitenTechnocracy Study CourseJohn MalcolmNoch keine Bewertungen
- PMI Procedure for Verifying Alloy Elements in Metals by XRFDokument2 SeitenPMI Procedure for Verifying Alloy Elements in Metals by XRFMohamed NabilNoch keine Bewertungen
- A Long Time Ago When The Philippines Was Not Yet Separated by A Wide Stretch of Water From The Mainland of AsiaDokument3 SeitenA Long Time Ago When The Philippines Was Not Yet Separated by A Wide Stretch of Water From The Mainland of AsiaAaron Bryan CoNoch keine Bewertungen
- Singapore Poison ShrimpDokument12 SeitenSingapore Poison ShrimpAlvin LeeNoch keine Bewertungen
- Bretton Woods and Marshall PlanDokument16 SeitenBretton Woods and Marshall Planapi-98469116100% (1)
- Eng AeroSpace The Future!Dokument46 SeitenEng AeroSpace The Future!Shawn Paul BoikeNoch keine Bewertungen
- Manhattan Project SummaryDokument5 SeitenManhattan Project Summaryapi-302406762Noch keine Bewertungen
- Rand Rr1579Dokument121 SeitenRand Rr1579LovacNoch keine Bewertungen
- China Development Bank and Invest in Iceland To CooperateDokument14 SeitenChina Development Bank and Invest in Iceland To CooperateDGB DGBNoch keine Bewertungen
- Defending Singapore's Lion City Through Military Might and DiplomacyDokument10 SeitenDefending Singapore's Lion City Through Military Might and Diplomacyyannology3904Noch keine Bewertungen
- Fake Fox News FilthDokument45 SeitenFake Fox News FilthTheFreeSchool100% (1)
- Sennholz - Money and Freedom (1985)Dokument99 SeitenSennholz - Money and Freedom (1985)FiestaNoch keine Bewertungen
- Simulating a Geared Motor and Encoder in Robot@Factory SimulatorDokument7 SeitenSimulating a Geared Motor and Encoder in Robot@Factory SimulatorOliver Malpartida CustodioNoch keine Bewertungen
- Claude Is Asking For The Corruption in The International Financial System To End in A Transition To A More Peaceeful WorldDokument3 SeitenClaude Is Asking For The Corruption in The International Financial System To End in A Transition To A More Peaceeful Worldkaren hudesNoch keine Bewertungen
- History of Big OilDokument73 SeitenHistory of Big Oildennis ridenourNoch keine Bewertungen
- English Debt Burden Liberation Certificate 23 2 2016 PDFDokument2 SeitenEnglish Debt Burden Liberation Certificate 23 2 2016 PDFIndia Irie Sanatana DharmaNoch keine Bewertungen
- Liberal Privilege - Joe Biden and The Democrats' Defense of The Indefensible by Donald Trump Jr.Dokument301 SeitenLiberal Privilege - Joe Biden and The Democrats' Defense of The Indefensible by Donald Trump Jr.Monika ValachovicovaNoch keine Bewertungen
- Congress: What To Expect From TheDokument48 SeitenCongress: What To Expect From TheDavid StertzNoch keine Bewertungen
- BMC Q2 2021 MaterialsDokument11 SeitenBMC Q2 2021 MaterialsForkLogNoch keine Bewertungen
- Patent US20120251502 - Human Ebola Virus Species and Compositions and Methods Thereof - Google PatenteDokument32 SeitenPatent US20120251502 - Human Ebola Virus Species and Compositions and Methods Thereof - Google PatenteSimona von BrownNoch keine Bewertungen
- Ukang: The Rituals of Crime Detection and Control in Annang Social Justice SystemDokument9 SeitenUkang: The Rituals of Crime Detection and Control in Annang Social Justice SystemAdediran DolapoNoch keine Bewertungen
- Nano in DefenseDokument22 SeitenNano in Defensesachin235Noch keine Bewertungen
- TMP 33 B2Dokument6 SeitenTMP 33 B2FrontiersNoch keine Bewertungen
- A Unifying Islamic StateDokument5 SeitenA Unifying Islamic StateAbrar Ahmad ChaudharyNoch keine Bewertungen
- ARK Is The Chipping Norton SetDokument1 SeiteARK Is The Chipping Norton SetCazzac111Noch keine Bewertungen
- Philippine Canadian Inquirer #481Dokument32 SeitenPhilippine Canadian Inquirer #481canadianinquirerNoch keine Bewertungen
- Wyeth Rotashield Package InsertDokument19 SeitenWyeth Rotashield Package InsertGeeleegoatNoch keine Bewertungen
- Biomass Gasification: Still Promising After 30 YearsDokument11 SeitenBiomass Gasification: Still Promising After 30 YearsNguyen LucNoch keine Bewertungen
- Technocracy: Building A Sustainable Society For A Post Carbon WorldDokument137 SeitenTechnocracy: Building A Sustainable Society For A Post Carbon WorldisenhandNoch keine Bewertungen
- Trump ResetDokument25 SeitenTrump ResetACasey101Noch keine Bewertungen
- Brussels Unveils Sweeping Plan To Cut EU's Carbon Footprint: Ringing Hollow Questions of Trust French ConnectionDokument20 SeitenBrussels Unveils Sweeping Plan To Cut EU's Carbon Footprint: Ringing Hollow Questions of Trust French ConnectionHoangNoch keine Bewertungen
- Coronavirus Models Naomi Campbell, Eva Herzigova, Natalia Vodianova: "The Irony Is Not Lost On Us."Dokument8 SeitenCoronavirus Models Naomi Campbell, Eva Herzigova, Natalia Vodianova: "The Irony Is Not Lost On Us."Cazzac111Noch keine Bewertungen
- WikipediaDokument45 SeitenWikipediaSarah SmithNoch keine Bewertungen
- Largest Space Manipulation Breakthrough Enables Warp Bubble PropulsionDokument9 SeitenLargest Space Manipulation Breakthrough Enables Warp Bubble PropulsiongeicoblacksNoch keine Bewertungen
- USAIDDokument344 SeitenUSAIDJoshua Ladia100% (1)
- Electro-Active Polymers: Current Capabilities and ChallengesDokument6 SeitenElectro-Active Polymers: Current Capabilities and Challengescatalin84Noch keine Bewertungen
- Electroactive Polymers As Artificial Muscles - Reality and ChallengesDokument10 SeitenElectroactive Polymers As Artificial Muscles - Reality and Challengesq12wertyNoch keine Bewertungen
- Electro-Active Polymers: Current Capabilities and ChallengesDokument7 SeitenElectro-Active Polymers: Current Capabilities and ChallengesChristopher R GeorgeNoch keine Bewertungen
- Electro-Active Polymers: Current Capabilities and ChallengesDokument7 SeitenElectro-Active Polymers: Current Capabilities and ChallengesChristopher R GeorgeNoch keine Bewertungen
- Tom Behan-The Resistible Rise of Benito Mussolini-Bookmarks (2003) PDFDokument144 SeitenTom Behan-The Resistible Rise of Benito Mussolini-Bookmarks (2003) PDFq12wertyNoch keine Bewertungen
- Tom Behan-The Resistible Rise of Benito Mussolini-Bookmarks (2003) PDFDokument144 SeitenTom Behan-The Resistible Rise of Benito Mussolini-Bookmarks (2003) PDFq12wertyNoch keine Bewertungen
- 7DIFDokument63 Seiten7DIFgalm8807Noch keine Bewertungen
- Millipore Express Membrane Wetting Guideug Ug4224en Ms PDFDokument10 SeitenMillipore Express Membrane Wetting Guideug Ug4224en Ms PDFq12wertyNoch keine Bewertungen
- Epmt 1year Especial Edition2016Dokument1 SeiteEpmt 1year Especial Edition2016q12wertyNoch keine Bewertungen
- New Materials For Micro Scale Sensors and ActuatorsDokument129 SeitenNew Materials For Micro Scale Sensors and ActuatorsAnOnYmOuS_1995Noch keine Bewertungen
- Optimization and Design of Energy Transport System For Solar Cooking ApplicationDokument10 SeitenOptimization and Design of Energy Transport System For Solar Cooking Applicationq12wertyNoch keine Bewertungen
- Analysis of Surface Degradation PP and H PDFDokument8 SeitenAnalysis of Surface Degradation PP and H PDFq12wertyNoch keine Bewertungen
- Conductive Polymer-Based SensorsDokument8 SeitenConductive Polymer-Based Sensorsq12wertyNoch keine Bewertungen
- IMF Evaluation Report On Greece, Ireland and Portugal's ProgrammesDokument86 SeitenIMF Evaluation Report On Greece, Ireland and Portugal's ProgrammesYannis KoutsomitisNoch keine Bewertungen
- Electroactive Polymers As Artificial Muscles - Reality and ChallengesDokument10 SeitenElectroactive Polymers As Artificial Muscles - Reality and Challengesq12wertyNoch keine Bewertungen
- Electroactive Polymeric SensorsDokument11 SeitenElectroactive Polymeric Sensorsq12wertyNoch keine Bewertungen
- Surf 'S Up: Work, Life, Balance and Brand in A New Age Capitalist OrganizationDokument21 SeitenSurf 'S Up: Work, Life, Balance and Brand in A New Age Capitalist Organizationq12wertyNoch keine Bewertungen
- Consumer Response Analysis To The Electronic BrandsDokument20 SeitenConsumer Response Analysis To The Electronic Brandsq12wertyNoch keine Bewertungen
- How Brand Portfolios Have Changed: A Study of Grocery Suppliers Brands From 1994 To 2004Dokument21 SeitenHow Brand Portfolios Have Changed: A Study of Grocery Suppliers Brands From 1994 To 2004q12werty100% (1)
- Smart PolymersDokument33 SeitenSmart Polymersq12wertyNoch keine Bewertungen
- Psychology of MusicDokument24 SeitenPsychology of Musicq12wertyNoch keine Bewertungen
- The Consumer Quest For Authenticity: The Multiplicity of Meanings Within The MG Subculture of ConsumptionDokument14 SeitenThe Consumer Quest For Authenticity: The Multiplicity of Meanings Within The MG Subculture of Consumptionq12wertyNoch keine Bewertungen
- Human Brands: Investigating Antecedents To Consumers' Strong Attachments To CelebritiesDokument17 SeitenHuman Brands: Investigating Antecedents To Consumers' Strong Attachments To CelebritiesAndrew MilesNoch keine Bewertungen
- B2B Branding A Financial Burden For ShareholdersDokument8 SeitenB2B Branding A Financial Burden For ShareholdersVinothNoch keine Bewertungen
- Marketization and The Recasting of The Professional SelfDokument38 SeitenMarketization and The Recasting of The Professional Selfq12werty0% (1)
- Doing Anthropology in Consuming ResearchDokument21 SeitenDoing Anthropology in Consuming Researchq12wertyNoch keine Bewertungen
- Contemplating A Self-Portrait As A PharmacisDokument19 SeitenContemplating A Self-Portrait As A Pharmacisq12werty100% (1)
- BOΤTLE LABELING MACHINEDokument4 SeitenBOΤTLE LABELING MACHINEq12wertyNoch keine Bewertungen
- Comparing Masses of Reactants and ProductsDokument4 SeitenComparing Masses of Reactants and ProductsDaniel TriumbariNoch keine Bewertungen
- Three-Dimensional Effects For Supported Excavations in ClayDokument7 SeitenThree-Dimensional Effects For Supported Excavations in ClayrkNoch keine Bewertungen
- Temperature Regulator With Two Temperature SensorsDokument2 SeitenTemperature Regulator With Two Temperature SensorsSandi AslanNoch keine Bewertungen
- The Basic Differential Equation For Radial Flow in A Porous MediumDokument8 SeitenThe Basic Differential Equation For Radial Flow in A Porous MediumrestofficalNoch keine Bewertungen
- 2018 MunsellelectronicDokument9 Seiten2018 MunsellelectronicCristian Camilo Quitian MoralesNoch keine Bewertungen
- PDFDokument36 SeitenPDFvishwasdeepjoshiNoch keine Bewertungen
- Ad 7746Dokument28 SeitenAd 7746pskorovsNoch keine Bewertungen
- Centrifuges For The Chemical IndustryDokument4 SeitenCentrifuges For The Chemical IndustrypintaratNoch keine Bewertungen
- 12 Class Physics 1-Chapter Sample Paper PDFDokument9 Seiten12 Class Physics 1-Chapter Sample Paper PDFharshNoch keine Bewertungen
- How Does DCPIP WorkDokument3 SeitenHow Does DCPIP WorkIsaac LeeNoch keine Bewertungen
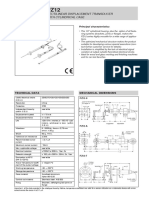
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDokument2 SeitenRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Noch keine Bewertungen
- Aditya and VarahaDokument7 SeitenAditya and VarahaVibhats VibhorNoch keine Bewertungen
- Vacita Integrated ServicesDokument21 SeitenVacita Integrated ServicesNwosu AugustineNoch keine Bewertungen
- M04 TemperatureDokument64 SeitenM04 TemperatureLê Văn TrườngNoch keine Bewertungen
- The Chronology Protection ConjectureDokument4 SeitenThe Chronology Protection ConjectureKrisNoch keine Bewertungen
- The Weighted Histogram Analysis Method (WHAM) : Michael AndrecDokument14 SeitenThe Weighted Histogram Analysis Method (WHAM) : Michael AndrecWilliam AgudeloNoch keine Bewertungen
- PID - From Theory To ImplementationDokument5 SeitenPID - From Theory To Implementationvictor-cabral3433Noch keine Bewertungen
- Geometric TolerancesDokument6 SeitenGeometric Tolerancesvaibhavgitevaibhav_9Noch keine Bewertungen
- Worksheet: ProofsDokument3 SeitenWorksheet: ProofsPCHANFANNoch keine Bewertungen
- Image ProcessingDokument49 SeitenImage ProcessingJyoti SinghNoch keine Bewertungen
- MechanicsDokument558 SeitenMechanicsfejiloNoch keine Bewertungen