Das könnte Ihnen auch gefallen
- Upscaling of Geocellular Models For Flow Simulation: Louis J. DurlofskyDokument46 SeitenUpscaling of Geocellular Models For Flow Simulation: Louis J. Durlofskychem352Noch keine Bewertungen
- Upscaling of Geocellular Models For Flow Simulation: Louis J. DurlofskyDokument46 SeitenUpscaling of Geocellular Models For Flow Simulation: Louis J. DurlofskyLukito Ardhi NugrohoNoch keine Bewertungen
- Part 12 Superposition Single and Multi WellDokument22 SeitenPart 12 Superposition Single and Multi WellChai Cws0% (1)
- Reduced Order Model Applied To Water Flooding OptimizationDokument18 SeitenReduced Order Model Applied To Water Flooding OptimizationFoundation CMGNoch keine Bewertungen
- Halliburton - Real Time Production Optimization & Reservoir Management PDFDokument21 SeitenHalliburton - Real Time Production Optimization & Reservoir Management PDFFernandoEnriqueCalveteGonzálezNoch keine Bewertungen
- Lecture1-PO SS2011 01 Introduction p26Dokument26 SeitenLecture1-PO SS2011 01 Introduction p26Everton CollingNoch keine Bewertungen
- SPE 119156 Automatic Well Placement Optimization in A Channelized Turbidite Reservoir Using Adjoint Based SensitivitiesDokument9 SeitenSPE 119156 Automatic Well Placement Optimization in A Channelized Turbidite Reservoir Using Adjoint Based Sensitivitiessajjad moradiNoch keine Bewertungen
- Pet 531 ADokument12 SeitenPet 531 AIgbereyivwe TejiriNoch keine Bewertungen
- 6 OneD Unconstrained OptDokument29 Seiten6 OneD Unconstrained OptLolie SaidNoch keine Bewertungen
- Dynamic Programing and Optimal ControlDokument276 SeitenDynamic Programing and Optimal ControlalexandraanastasiaNoch keine Bewertungen
- Control Systems Lab - SC4070: DR - Ir. Alessandro AbateDokument35 SeitenControl Systems Lab - SC4070: DR - Ir. Alessandro AbatemakroumNoch keine Bewertungen
- Chap 8Dokument50 SeitenChap 8Karthick ManojNoch keine Bewertungen
- MIT2 29F11 Lect 11Dokument20 SeitenMIT2 29F11 Lect 11costpopNoch keine Bewertungen
- Constraint Satisfaction ProblemsDokument49 SeitenConstraint Satisfaction ProblemsPoonam KumariNoch keine Bewertungen
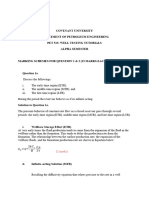
- Exercise - Numerical Methods For Process Simulation: Algebraic Solvers Problem 1: CSTRDokument6 SeitenExercise - Numerical Methods For Process Simulation: Algebraic Solvers Problem 1: CSTRMcChima LeonardNoch keine Bewertungen
- Well Testing Res Des ConceptsDokument59 SeitenWell Testing Res Des ConceptsAvinash_Negi_7301100% (1)
- Numerical Solution of Single Odes: Euler Methods Runge-Kutta Methods Multistep Methods Matlab ExampleDokument16 SeitenNumerical Solution of Single Odes: Euler Methods Runge-Kutta Methods Multistep Methods Matlab ExampleZlatko AlomerovicNoch keine Bewertungen
- CN2116-Unit 12-2013Dokument25 SeitenCN2116-Unit 12-2013Jiaqi ChuaNoch keine Bewertungen
- Simulation Paper Nit RourkelaDokument2 SeitenSimulation Paper Nit RourkelaYASHNoch keine Bewertungen
- MCMC BriefDokument69 SeitenMCMC Briefjakub_gramolNoch keine Bewertungen
- WT&D (Optimization of WDS) PDFDokument89 SeitenWT&D (Optimization of WDS) PDFAbirham TilahunNoch keine Bewertungen
- Partial Least Squares A TutorialDokument12 SeitenPartial Least Squares A TutorialGutama Indra GandhaNoch keine Bewertungen
- Desopt 2016 02 PDFDokument36 SeitenDesopt 2016 02 PDFAndrea ChaseNoch keine Bewertungen
- DC AnalysisDokument27 SeitenDC AnalysisJr CallangaNoch keine Bewertungen
- DSE 3151 25 Sep 2023Dokument9 SeitenDSE 3151 25 Sep 2023KaiNoch keine Bewertungen
- Liu2017 Article AFastAndStableAlgorithmForLineDokument31 SeitenLiu2017 Article AFastAndStableAlgorithmForLineAman JalanNoch keine Bewertungen
- Slide Jaya Alg Vs Cuckoo Search AlgDokument14 SeitenSlide Jaya Alg Vs Cuckoo Search AlgMashuk AhmedNoch keine Bewertungen
- Z TestDokument39 SeitenZ Testanmolgarg12950% (2)
- 04-Build-Up TestDokument53 Seiten04-Build-Up Testwisam alkhooryNoch keine Bewertungen
- Well Test Interpretation ENSPM 5aDokument51 SeitenWell Test Interpretation ENSPM 5aMygroup 5544100% (2)
- Biogeography-Based Optimization: Dan Simon Cleveland State University Fall 2008Dokument39 SeitenBiogeography-Based Optimization: Dan Simon Cleveland State University Fall 2008Srini VasNoch keine Bewertungen
- Sparse Optimization Lecture: Basic Sparse Optimization ModelsDokument33 SeitenSparse Optimization Lecture: Basic Sparse Optimization ModelsCatalin TomaNoch keine Bewertungen
- Introduction To Quantum Computing: Miklos SanthaDokument31 SeitenIntroduction To Quantum Computing: Miklos SanthaJinto JohnsonNoch keine Bewertungen
- Overton TalkDokument41 SeitenOverton Talkluka alexNoch keine Bewertungen
- Chapter 5 - Managing Class A ItemsDokument17 SeitenChapter 5 - Managing Class A ItemsKhánh Đoan Lê ĐìnhNoch keine Bewertungen
- Tfaws2011 Ae 001Dokument28 SeitenTfaws2011 Ae 001Ameenuddin MohammedNoch keine Bewertungen
- Veldhoven Aug 2005 JansenDokument84 SeitenVeldhoven Aug 2005 JansenkurtpeekNoch keine Bewertungen
- Dynamic Programming: Department of CSE JNTUA College of Engg., KalikiriDokument66 SeitenDynamic Programming: Department of CSE JNTUA College of Engg., KalikiriMaaz ChauhannNoch keine Bewertungen
- SAHADEB - Logistic Reg - Sessions 8-10Dokument145 SeitenSAHADEB - Logistic Reg - Sessions 8-10Writabrata BhattacharyaNoch keine Bewertungen
- 1 Transformation Into CNFDokument4 Seiten1 Transformation Into CNFMade Alam KamajanaNoch keine Bewertungen
- 01 Revision1 ResDokument4 Seiten01 Revision1 ResNicholas LeocholasNoch keine Bewertungen
- Control Systems Lab - SC4070: DR - Ir. Alessandro AbateDokument39 SeitenControl Systems Lab - SC4070: DR - Ir. Alessandro AbatemakroumNoch keine Bewertungen
- Control Systems Lab (SC4070) : Georg SchitterDokument28 SeitenControl Systems Lab (SC4070) : Georg SchittermakroumNoch keine Bewertungen
- Numerical Modelling in Fortran: Day 6: Paul Tackley, 2017Dokument53 SeitenNumerical Modelling in Fortran: Day 6: Paul Tackley, 2017Roberto CoelhoNoch keine Bewertungen
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Dokument10 SeitenExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNoch keine Bewertungen
- Non-Linear Least Squares: in General We Are Not Lucky Enough To Have A Linear Problem. in This CaseDokument49 SeitenNon-Linear Least Squares: in General We Are Not Lucky Enough To Have A Linear Problem. in This CaseSyarif HidayatNoch keine Bewertungen
- International Journal of C Numerical Analysis and Modeling Computing and InformationDokument7 SeitenInternational Journal of C Numerical Analysis and Modeling Computing and Informationtomk2220Noch keine Bewertungen
- Outline: SamplingDokument43 SeitenOutline: Samplingdjoseph_1Noch keine Bewertungen
- Sec6 Steepest AscentDokument13 SeitenSec6 Steepest AscentSaheed A BusuraNoch keine Bewertungen
- B KLDokument4 SeitenB KL53melmelNoch keine Bewertungen
- Farz6 PosterDokument1 SeiteFarz6 PosterFarzaneh SedighiNoch keine Bewertungen
- Fast Signal Processing Algorithms Week 3Dokument58 SeitenFast Signal Processing Algorithms Week 3M Ali NaeemNoch keine Bewertungen
- Assignment 1Dokument1 SeiteAssignment 1Hafizuddin AdzharNoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119Von EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Noch keine Bewertungen
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportVon EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNoch keine Bewertungen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- TD Quintolubric 888 68Dokument2 SeitenTD Quintolubric 888 68Haitham YoussefNoch keine Bewertungen
- The Reef Wayfinding Plan and Signage Design Concept 28 August 2019Dokument51 SeitenThe Reef Wayfinding Plan and Signage Design Concept 28 August 2019Michele MontoloNoch keine Bewertungen
- Online Examination System For AndroidDokument7 SeitenOnline Examination System For AndroidSri Sai UniversityNoch keine Bewertungen
- Piping Handbook - Hydrocarbon Processing - 1968Dokument140 SeitenPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- Simatic EKB Install 2012-03-08Dokument2 SeitenSimatic EKB Install 2012-03-08Oton SilvaNoch keine Bewertungen
- Optimizing Technique-Grenade Explosion MethodDokument18 SeitenOptimizing Technique-Grenade Explosion MethodUday Wankar100% (1)
- Comparative Tracking Index of Electrical Insulating MaterialsDokument6 SeitenComparative Tracking Index of Electrical Insulating MaterialsAbu Anas M.SalaheldinNoch keine Bewertungen
- Compact 40/25Dokument58 SeitenCompact 40/25znim04Noch keine Bewertungen
- Biodegradability of SurfactantsDokument1 SeiteBiodegradability of SurfactantsTinnysumardiNoch keine Bewertungen
- Fluid Mechanics Seventh Edition by Frank M. WhiteDokument1 SeiteFluid Mechanics Seventh Edition by Frank M. WhiteDarKaiserNoch keine Bewertungen
- Teaching Finite Element Analysis For Design Engineers: August 2011Dokument7 SeitenTeaching Finite Element Analysis For Design Engineers: August 2011Nelu CheluNoch keine Bewertungen
- Genius Publication CatalogueDokument16 SeitenGenius Publication CatalogueRaheel KhanNoch keine Bewertungen
- Antikythera MechanismDokument25 SeitenAntikythera MechanismchetansergiurazvanNoch keine Bewertungen
- A9K CatalogueDokument152 SeitenA9K CatalogueMohamed SaffiqNoch keine Bewertungen
- Stock # Carbon Weight Burn Temp Puncture StrengthDokument8 SeitenStock # Carbon Weight Burn Temp Puncture StrengthMintNoch keine Bewertungen
- Ammonia Production From Natural Gas-Haldor Topsoe ProcessDokument22 SeitenAmmonia Production From Natural Gas-Haldor Topsoe ProcessYash BhimaniNoch keine Bewertungen
- Oracle Jrockit Mission Control Lab GuideDokument17 SeitenOracle Jrockit Mission Control Lab GuideashuhegdeNoch keine Bewertungen
- Internship Report May 2016Dokument11 SeitenInternship Report May 2016Rupini RagaviahNoch keine Bewertungen
- EM230 BR BM3 Fitting InstructionsDokument2 SeitenEM230 BR BM3 Fitting InstructionsRoman BabaevNoch keine Bewertungen
- Supplier GPO Q TM 0001 02 SPDCR TemplateDokument6 SeitenSupplier GPO Q TM 0001 02 SPDCR TemplateMahe RonaldoNoch keine Bewertungen
- Turbin 1Dokument27 SeitenTurbin 1Durjoy Chakraborty100% (1)
- Cbse PMT 2012Dokument33 SeitenCbse PMT 2012Vishal RamakrishnanNoch keine Bewertungen
- Estimate SR 14-15 02 KHANDEKARDokument5 SeitenEstimate SR 14-15 02 KHANDEKARAkshay SavvasheriNoch keine Bewertungen
- Component Modeling - HDokument5 SeitenComponent Modeling - HVasu IyerNoch keine Bewertungen
- Riscv SpecDokument32 SeitenRiscv SpeckartimidNoch keine Bewertungen
- HiraDokument30 SeitenHiravijay kumar singhNoch keine Bewertungen
- Experiment 5 DACDokument3 SeitenExperiment 5 DACABHISHEK SHARMANoch keine Bewertungen
- WEISER Locks and HardwareDokument24 SeitenWEISER Locks and HardwareMaritime Door & WindowNoch keine Bewertungen
- Advance Logic Activity On CountersDokument31 SeitenAdvance Logic Activity On CountersKrinx BuliganNoch keine Bewertungen
- JDE ApplicationDokument642 SeitenJDE ApplicationAnonymous cputyzNoch keine Bewertungen