Das könnte Ihnen auch gefallen
- Bolted Joint Engineering PreviewDokument15 SeitenBolted Joint Engineering Previewsahathermal66330% (2)
- Throughput and Delay Optimal Scheduling in Cognitive Radio Networks Under IT Constraints JOKAN-2009Dokument9 SeitenThroughput and Delay Optimal Scheduling in Cognitive Radio Networks Under IT Constraints JOKAN-2009sahathermal6633Noch keine Bewertungen
- John Nash - Lecture Game Theory PDFDokument31 SeitenJohn Nash - Lecture Game Theory PDFTsongmingNoch keine Bewertungen
- Survey On Performance Analysis of Cognitive Radio NetworksDokument15 SeitenSurvey On Performance Analysis of Cognitive Radio Networkssahathermal6633Noch keine Bewertungen
- Supermodularity Is Not Falsifiable, 2006Dokument40 SeitenSupermodularity Is Not Falsifiable, 2006sahathermal6633Noch keine Bewertungen
- The Particle Swarm Optimization Algorithm, Convergence Analysis and Parameter SelectionDokument9 SeitenThe Particle Swarm Optimization Algorithm, Convergence Analysis and Parameter SelectionbaalaajeeNoch keine Bewertungen
- Technical Challenges of Cognitive Radio-Related Systems 2008Dokument13 SeitenTechnical Challenges of Cognitive Radio-Related Systems 2008sahathermal6633Noch keine Bewertungen
- The Equilibrium Problem in Classical Game TheoryDokument32 SeitenThe Equilibrium Problem in Classical Game Theorysahathermal6633Noch keine Bewertungen
- The Application of Femtocells As A Technical Solution For A Telecomunication Provider, TEM Journal-2012Dokument6 SeitenThe Application of Femtocells As A Technical Solution For A Telecomunication Provider, TEM Journal-2012sahathermal6633Noch keine Bewertungen
- The Analysis of System Performance of An MC-CDMA System Over Two-Tier Femtocell Networks, IMECS-2010Dokument4 SeitenThe Analysis of System Performance of An MC-CDMA System Over Two-Tier Femtocell Networks, IMECS-2010sahathermal6633Noch keine Bewertungen
- Survey of Security Issues in Cognitive Radio NetworksDokument18 SeitenSurvey of Security Issues in Cognitive Radio NetworksLalasaKoneruNoch keine Bewertungen
- 3Dokument20 Seiten3Negin MalekiNoch keine Bewertungen
- Supermodularity and Supermodular Games, 2007 IESEBSDokument16 SeitenSupermodularity and Supermodular Games, 2007 IESEBSsahathermal6633Noch keine Bewertungen
- Survey of Cognitive Radio ArchitecturesDokument6 SeitenSurvey of Cognitive Radio Architecturessahathermal6633Noch keine Bewertungen
- Mobile Hardness Testing - Application Guide For Hardness TestingDokument24 SeitenMobile Hardness Testing - Application Guide For Hardness Testingsahathermal6633Noch keine Bewertungen
- Supermodularity and Supermodular Games, 2007 IESEBSDokument16 SeitenSupermodularity and Supermodular Games, 2007 IESEBSsahathermal6633Noch keine Bewertungen
- Supermodularity and Supermodular Games, 2007 IESEBSDokument16 SeitenSupermodularity and Supermodular Games, 2007 IESEBSsahathermal6633Noch keine Bewertungen
- Strategic and Extensive GamesDokument27 SeitenStrategic and Extensive Gamessahathermal6633Noch keine Bewertungen
- Dynamic Response of An Overhead Crane System, 1998Dokument18 SeitenDynamic Response of An Overhead Crane System, 1998sahathermal6633Noch keine Bewertungen
- A Mechatronics Approach in Intelligent Control Systems of The Overhead Travelling Cranes Prototyping, 2008Dokument5 SeitenA Mechatronics Approach in Intelligent Control Systems of The Overhead Travelling Cranes Prototyping, 2008sahathermal6633Noch keine Bewertungen
- Supermodularity and Preferences, Journal of Economic Theory 144 (2009)Dokument11 SeitenSupermodularity and Preferences, Journal of Economic Theory 144 (2009)sahathermal6633Noch keine Bewertungen
- Supermodularity and Complementarity in Economics An Elementary Survey, Southern Economic Journal 2005Dokument26 SeitenSupermodularity and Complementarity in Economics An Elementary Survey, Southern Economic Journal 2005sahathermal6633Noch keine Bewertungen
- Non-Destructive Testing For Plant Life AssessmentDokument68 SeitenNon-Destructive Testing For Plant Life AssessmentKhalid M. Hafez100% (3)
- Subspace-Based Method For Spectrum SensingDokument5 SeitenSubspace-Based Method For Spectrum Sensingsahathermal6633Noch keine Bewertungen
- Pipe Support Criteria For ASME B31.3 Metallic PipingDokument11 SeitenPipe Support Criteria For ASME B31.3 Metallic PipingUsman Naseem100% (4)
- Subcarrier and Power Allocation in OFDM-based Cognitive Radio Systems IJCNIS-2010Dokument7 SeitenSubcarrier and Power Allocation in OFDM-based Cognitive Radio Systems IJCNIS-2010sahathermal6633Noch keine Bewertungen
- Stochastic Channel Selection in Cognitive Radio NetworksDokument5 SeitenStochastic Channel Selection in Cognitive Radio Networkssahathermal6633Noch keine Bewertungen
- Rolling Element Bearing Analysis: by Brian P. Graney and Ken StarryDokument8 SeitenRolling Element Bearing Analysis: by Brian P. Graney and Ken StarryAlejandro José Poveda GuevaraNoch keine Bewertungen
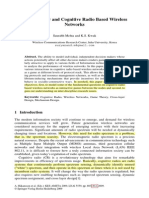
- Game Theory and Cognitive Radio Based Wireless Networks, Mehta, Springer-Verlag-2009Dokument10 SeitenGame Theory and Cognitive Radio Based Wireless Networks, Mehta, Springer-Verlag-2009sahathermal6633Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Lecture 1: Newton Forward and Backward Interpolation: M R Mishra May 9, 2022Dokument10 SeitenLecture 1: Newton Forward and Backward Interpolation: M R Mishra May 9, 2022MANAS RANJAN MISHRANoch keine Bewertungen
- ER DiagramDokument23 SeitenER Diagramapi-2757091480% (20)
- Lecture 4Dokument25 SeitenLecture 4ptnyagortey91Noch keine Bewertungen
- Piping MaterialDokument45 SeitenPiping MaterialLcm TnlNoch keine Bewertungen
- Investigatory Project Pesticide From RadishDokument4 SeitenInvestigatory Project Pesticide From Radishmax314100% (1)
- Gi 007 Gerund InfinitiveDokument2 SeitenGi 007 Gerund Infinitiveprince husainNoch keine Bewertungen
- Device Interface Device Type (Router, Switch, Host) IP Address Subnet Mask Default GatewayDokument2 SeitenDevice Interface Device Type (Router, Switch, Host) IP Address Subnet Mask Default GatewayRohit Chouhan0% (1)
- Judge Vest Printable PatternDokument24 SeitenJudge Vest Printable PatternMomNoch keine Bewertungen
- Newcomers Guide To The Canadian Job MarketDokument47 SeitenNewcomers Guide To The Canadian Job MarketSS NairNoch keine Bewertungen
- USA V BRACKLEY Jan6th Criminal ComplaintDokument11 SeitenUSA V BRACKLEY Jan6th Criminal ComplaintFile 411Noch keine Bewertungen
- For Coin & Blood (2nd Edition) - SicknessDokument16 SeitenFor Coin & Blood (2nd Edition) - SicknessMyriam Poveda50% (2)
- MSDS FluorouracilDokument3 SeitenMSDS FluorouracilRita NascimentoNoch keine Bewertungen
- English Week3 PDFDokument4 SeitenEnglish Week3 PDFLucky GeminaNoch keine Bewertungen
- AAU5243 DescriptionDokument30 SeitenAAU5243 DescriptionWisut MorthaiNoch keine Bewertungen
- Jazan Refinery and Terminal ProjectDokument3 SeitenJazan Refinery and Terminal ProjectkhsaeedNoch keine Bewertungen
- Course: Citizenship Education and Community Engagement: (8604) Assignment # 1Dokument16 SeitenCourse: Citizenship Education and Community Engagement: (8604) Assignment # 1Amyna Rafy AwanNoch keine Bewertungen
- THE PEOPLE OF FARSCAPEDokument29 SeitenTHE PEOPLE OF FARSCAPEedemaitreNoch keine Bewertungen
- ULN2001, ULN2002 ULN2003, ULN2004: DescriptionDokument21 SeitenULN2001, ULN2002 ULN2003, ULN2004: Descriptionjulio montenegroNoch keine Bewertungen
- Insize Catalogue 2183,2392Dokument1 SeiteInsize Catalogue 2183,2392calidadcdokepNoch keine Bewertungen
- SWOT Analysis of Solar Energy in India: Abdul Khader.J Mohamed Idris.PDokument4 SeitenSWOT Analysis of Solar Energy in India: Abdul Khader.J Mohamed Idris.PSuhas VaishnavNoch keine Bewertungen
- Term Sheet: Original Borrowers) Material Subsidiaries/jurisdiction) )Dokument16 SeitenTerm Sheet: Original Borrowers) Material Subsidiaries/jurisdiction) )spachecofdz0% (1)
- 2019 May Chronicle AICFDokument27 Seiten2019 May Chronicle AICFRam KrishnaNoch keine Bewertungen
- Biomotor Development For Speed-Power Athletes: Mike Young, PHD Whitecaps FC - Vancouver, BC Athletic Lab - Cary, NCDokument125 SeitenBiomotor Development For Speed-Power Athletes: Mike Young, PHD Whitecaps FC - Vancouver, BC Athletic Lab - Cary, NCAlpesh Jadhav100% (1)
- IMM Indian Oil Case Group 3Dokument13 SeitenIMM Indian Oil Case Group 3Soniya AgnihotriNoch keine Bewertungen
- PCSE_WorkbookDokument70 SeitenPCSE_WorkbookWilliam Ribeiro da SilvaNoch keine Bewertungen
- Programming Language Foundations PDFDokument338 SeitenProgramming Language Foundations PDFTOURE100% (2)
- 5505 SW 138th CT, Miami, FL 33175 ZillowDokument1 Seite5505 SW 138th CT, Miami, FL 33175 Zillowlisalinda29398378Noch keine Bewertungen
- Tygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingDokument4 SeitenTygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingAluizioNoch keine Bewertungen
- Application D2 WS2023Dokument11 SeitenApplication D2 WS2023María Camila AlvaradoNoch keine Bewertungen
- How To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)Dokument19 SeitenHow To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)hiwot kebedeNoch keine Bewertungen