Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 雅思写作:88个实用词组搭配和句型Dokument7 Seiten雅思写作:88个实用词组搭配和句型Danny LiNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- An Optimization Approach To Hybrid Electric Propulsion System DesignDokument22 SeitenAn Optimization Approach To Hybrid Electric Propulsion System DesignDanny LiNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDokument9 SeitenSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNoch keine Bewertungen
- Modelling of SVC - NR 500 026 eDokument17 SeitenModelling of SVC - NR 500 026 eEr Vaibhav TureNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Audio Sieving Using Signal FiltersDokument19 SeitenAudio Sieving Using Signal FiltersPiyush YadavNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Curriculum Vitae: Home AddressDokument3 SeitenCurriculum Vitae: Home Addresswqs_19Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Design, Simulation and Implementation of Very Compact Dual-Band Microstrip Bandpass Filter For 4G and 5G ApplicationsDokument4 SeitenDesign, Simulation and Implementation of Very Compact Dual-Band Microstrip Bandpass Filter For 4G and 5G ApplicationsTran TommyNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Signal-Flow Graphs & Mason's RuleDokument18 SeitenSignal-Flow Graphs & Mason's RuleRemuel ArellanoNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Feedback Linearization Based Control Approach For Air Syste - 2014 - IFAC ProceeDokument6 SeitenFeedback Linearization Based Control Approach For Air Syste - 2014 - IFAC ProceemuradbashirNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- A Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDokument12 SeitenA Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDipanjan DasNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Gozuk EDS1000 Inverter User Manual PDFDokument184 SeitenGozuk EDS1000 Inverter User Manual PDFAnonymous W07N3G3ANoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Temperature Monitor and Control Using Lm35Dokument2 SeitenTemperature Monitor and Control Using Lm35Harsha0% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- DCS - SCADA - BMS Integration GatewayDokument4 SeitenDCS - SCADA - BMS Integration Gatewayamhosny64Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Clca 2018Dokument6 SeitenClca 2018JLuis LuNaNoch keine Bewertungen
- Computer Project - 1-141Dokument1 SeiteComputer Project - 1-141M.S.AbdullahNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Control Engineering - Project TopicsDokument11 SeitenControl Engineering - Project TopicsDavid AbbreyNoch keine Bewertungen
- Power System Operation & Control M.tech (Regular)Dokument41 SeitenPower System Operation & Control M.tech (Regular)Mohammad MasiehNoch keine Bewertungen
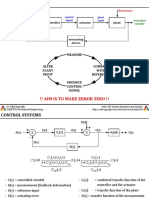
- !! Aim Is To Make Error Zero !!: Controller Actuator PlantDokument11 Seiten!! Aim Is To Make Error Zero !!: Controller Actuator PlantcapturemrahNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Temperature Controller TZN4S14R Autonics PDFDokument24 SeitenTemperature Controller TZN4S14R Autonics PDFdita ayuNoch keine Bewertungen
- Fuzzy Speed Controller Design of Three Phase Induction MotorDokument6 SeitenFuzzy Speed Controller Design of Three Phase Induction MotorELECTRICAL DEPARTMENTNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Gujarat Technological UniversityDokument2 SeitenGujarat Technological UniversityRenieNoch keine Bewertungen
- A MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMDokument15 SeitenA MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMmusty38Noch keine Bewertungen
- Betriebsanleitung: Instruction ManualDokument56 SeitenBetriebsanleitung: Instruction ManualDavid Davidneel DavidsNoch keine Bewertungen
- Filter DesignDokument42 SeitenFilter DesignShivanshu Trivedi100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Control Theory QuizDokument28 SeitenControl Theory Quizpushplatameena1Noch keine Bewertungen
- FICTA - Paper - Final PDFDokument9 SeitenFICTA - Paper - Final PDFPratap Kumar PanigrahiNoch keine Bewertungen
- Roboteq Controllers User Manual v2.0 PDFDokument360 SeitenRoboteq Controllers User Manual v2.0 PDFali beyNoch keine Bewertungen
- Module 5: Design of Sampled Data Control SystemsDokument5 SeitenModule 5: Design of Sampled Data Control SystemsOmarShindiNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- 15ME745 Smart Materials Module 3Dokument18 Seiten15ME745 Smart Materials Module 3Yogananda Bangalore ShanthamurthyNoch keine Bewertungen
- A Mathematical Approach From Classical Control To Advanced ControlDokument346 SeitenA Mathematical Approach From Classical Control To Advanced ControlMohammed Ahsan FawadNoch keine Bewertungen
- Modern Control Theory PDFDokument113 SeitenModern Control Theory PDFBelayneh Tadesse75% (4)
- Indirect Field-Oriented Control of IM Based On Synergetic Control TheoryDokument7 SeitenIndirect Field-Oriented Control of IM Based On Synergetic Control Theorysajs201100% (2)
- HW8 PhysioDokument5 SeitenHW8 PhysiobobNoch keine Bewertungen
- ITU R BS.1770 1 FiltersDokument5 SeitenITU R BS.1770 1 FiltersVicente LeunamNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)