Das könnte Ihnen auch gefallen
- Probador de Servos Con El IntegradoDokument9 SeitenProbador de Servos Con El IntegradoAnthony PerezNoch keine Bewertungen
- Contador de Objetos en Una Faja TransportadoraDokument16 SeitenContador de Objetos en Una Faja TransportadoraJesus Martin Alvarez VasquezNoch keine Bewertungen
- Lab 5Dokument13 SeitenLab 5Manuel CoaguilaNoch keine Bewertungen
- Temporizador 555Dokument10 SeitenTemporizador 555xizuthNoch keine Bewertungen
- 11.1 Guia PrácticaDokument13 Seiten11.1 Guia PrácticaJimenaAlexandraAroniPazNoch keine Bewertungen
- Timer 555 FinalDokument20 SeitenTimer 555 FinalByron Andres SantibañezNoch keine Bewertungen
- Circuito Conversor de Digital A Análogo (Contador + Sumador) "Dokument12 SeitenCircuito Conversor de Digital A Análogo (Contador + Sumador) "Luis ChasiluisaNoch keine Bewertungen
- Tacómetro DigitalDokument9 SeitenTacómetro DigitalDríade VegasNoch keine Bewertungen
- PWM BuckDokument13 SeitenPWM BuckJuanSebastianSotomayorNoch keine Bewertungen
- PCB TCA785 Tarjeta de Control Disparo SCRDokument31 SeitenPCB TCA785 Tarjeta de Control Disparo SCRJorge Johnny Chipana Machaca100% (1)
- Fuente de Alimentacion Con Voltimetro y AmperimetroDokument20 SeitenFuente de Alimentacion Con Voltimetro y AmperimetroBrian Apolo PeñalozaNoch keine Bewertungen
- Practica Timer 555Dokument7 SeitenPractica Timer 555carlos turrizaNoch keine Bewertungen
- Circuito Integrado 555Dokument7 SeitenCircuito Integrado 555Junior Ademir Flores VargasNoch keine Bewertungen
- Control Digital PWM de Un Motor DCDokument12 SeitenControl Digital PWM de Un Motor DCEdgarStheepMariscalVeizagaNoch keine Bewertungen
- Previo 1 Sist. DigitalesDokument13 SeitenPrevio 1 Sist. DigitalesValeria Andrea Nina ArrescurenagaNoch keine Bewertungen
- Lab 1 SCRDokument6 SeitenLab 1 SCRAlexander GonzalezNoch keine Bewertungen
- Diseño de Un ECGDokument61 SeitenDiseño de Un ECGmyoshkeuNoch keine Bewertungen
- Electrónica Bàsica Ci555Dokument19 SeitenElectrónica Bàsica Ci555Luis Gerardo Dominguez SalazarNoch keine Bewertungen
- Lab2-SD 2020-IIDokument8 SeitenLab2-SD 2020-IIJorge Aaron Moran SamameNoch keine Bewertungen
- Informe PreamplificadorDokument26 SeitenInforme PreamplificadorNico SuNoch keine Bewertungen
- Clase 11Dokument16 SeitenClase 11Juan Carlos ZuñigaNoch keine Bewertungen
- Feb 00Dokument10 SeitenFeb 00Sasuke BacusNoch keine Bewertungen
- Reporte Cruce Por Cero GERARDODokument8 SeitenReporte Cruce Por Cero GERARDOfirst_second12Noch keine Bewertungen
- Proyecto Inversor Monofásico de Onda CuadradaDokument15 SeitenProyecto Inversor Monofásico de Onda CuadradaheyreheyreNoch keine Bewertungen
- Modulación de Ancho de Pulso (Guia de Laboratorio)Dokument7 SeitenModulación de Ancho de Pulso (Guia de Laboratorio)Cuenta PersonalNoch keine Bewertungen
- Entrega 2 Sistemas Digitales y EnsambladoresDokument3 SeitenEntrega 2 Sistemas Digitales y EnsambladoresErledy 711Noch keine Bewertungen
- Laboratorio 1 Instrumentación Ao Comparador 1S.2021Dokument12 SeitenLaboratorio 1 Instrumentación Ao Comparador 1S.2021Diego PinzonNoch keine Bewertungen
- Laboratorio de Timer 555Dokument7 SeitenLaboratorio de Timer 555Cesar CFNoch keine Bewertungen
- 555 MonoestableDokument27 Seiten555 MonoestableElizabeth Gomez MendezNoch keine Bewertungen
- Amplificador de Emisor ComunDokument11 SeitenAmplificador de Emisor ComunCharlie Hernandez100% (1)
- PspiceDokument7 SeitenPspiceDiego ArmandoNoch keine Bewertungen
- Controlar Velocidad de Motor DC Por Ancho de PulsoDokument11 SeitenControlar Velocidad de Motor DC Por Ancho de PulsoJose Luis Apaza CortesNoch keine Bewertungen
- Informe 1-2Dokument10 SeitenInforme 1-2BauroNoch keine Bewertungen
- Aplicaciones Del Icl7107Dokument2 SeitenAplicaciones Del Icl7107Oscar AyalaNoch keine Bewertungen
- Taller Cruce Por CeroDokument10 SeitenTaller Cruce Por CeroALFREDO CARRASCAL GUARIN0% (1)
- Lab 2 SDDokument11 SeitenLab 2 SDJulio Enrique Salazar LopezNoch keine Bewertungen
- TimersDokument11 SeitenTimersErick ASNoch keine Bewertungen
- Practica 8Dokument37 SeitenPractica 8Renato Beltran CaceresNoch keine Bewertungen
- Informe Previo 6 EE441Dokument12 SeitenInforme Previo 6 EE441Marlon Jesus Alburqueque ValdiviaNoch keine Bewertungen
- OsciloscopioDokument21 SeitenOsciloscopioVictor Eduardo LosohaNoch keine Bewertungen
- Circuitos p11Dokument7 SeitenCircuitos p11prohpeNoch keine Bewertungen
- Amp Con Opreracional y Salida CuasicomplementarioDokument79 SeitenAmp Con Opreracional y Salida CuasicomplementarioFabio LopezNoch keine Bewertungen
- Como Construir Un Reloj DigitalDokument3 SeitenComo Construir Un Reloj DigitalozielsNoch keine Bewertungen
- Reporte Del Timer 555Dokument9 SeitenReporte Del Timer 555steven somarribaNoch keine Bewertungen
- Timer 555Dokument16 SeitenTimer 555oapvNoch keine Bewertungen
- Tarea 4 Componente Practico Jhonatan RojasDokument16 SeitenTarea 4 Componente Practico Jhonatan Rojasdidier castroNoch keine Bewertungen
- Tarea 4 Componente Practico Jhonatan RojasDokument16 SeitenTarea 4 Componente Practico Jhonatan Rojasesneyder quevedoNoch keine Bewertungen
- El Contador DigitalDokument24 SeitenEl Contador DigitalAnonymous lrrwBxUYNoch keine Bewertungen
- Practica 3 Comparador Control de PWMDokument10 SeitenPractica 3 Comparador Control de PWMJesus Alberto Perez RinconNoch keine Bewertungen
- Ped 2 FSDDokument13 SeitenPed 2 FSDTere LuNoch keine Bewertungen
- Reporte Parcial 2 ElectronicaDokument22 SeitenReporte Parcial 2 ElectronicaLuis Raul LarreynagaNoch keine Bewertungen
- PWM, ADC, DAC y SCRDokument37 SeitenPWM, ADC, DAC y SCRCarlos Guillermo Zavarce Gonzalez100% (2)
- Contador 555Dokument11 SeitenContador 55515 Haros Gutierrez Jessica MayteNoch keine Bewertungen
- Informe Lab Oscilador Sinusoidal PDFDokument8 SeitenInforme Lab Oscilador Sinusoidal PDFMaribel Del Pilar Duarte romeroNoch keine Bewertungen
- Dispositivo 555Dokument12 SeitenDispositivo 555Jerson MartínezNoch keine Bewertungen
- Interfaces Prác2 PWM Equipo6Dokument13 SeitenInterfaces Prác2 PWM Equipo6Lucio TorresNoch keine Bewertungen
- Armónicas en Sistemas Eléctricos IndustrialesVon EverandArmónicas en Sistemas Eléctricos IndustrialesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- 100 Circuitos de Shields para MotoresVon Everand100 Circuitos de Shields para MotoresBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Contestacion Demanda Patricia LelalDokument12 SeitenContestacion Demanda Patricia LelalCarlos Javier Dorado PerafanNoch keine Bewertungen
- IEEE STD STD 95Dokument63 SeitenIEEE STD STD 95MARCO ANTONIO JIMENEZ TONATONoch keine Bewertungen
- Lista de Chequeo Sistemas Integrados de GestiónDokument7 SeitenLista de Chequeo Sistemas Integrados de GestiónMauricio Tejada100% (1)
- Saneamiento PredialDokument2 SeitenSaneamiento PredialEiker FalconNoch keine Bewertungen
- Los Emblemas de AlciatoDokument7 SeitenLos Emblemas de AlciatoEduardo AltúzarNoch keine Bewertungen
- ENVIO 2021 - InicialDokument5 SeitenENVIO 2021 - InicialKIESER DE LA PEÑA GASPARNoch keine Bewertungen
- PDF Ley Olimpia - CompressDokument29 SeitenPDF Ley Olimpia - CompressGabriel HipolitoNoch keine Bewertungen
- Aspectos para Profundizar El CurriculoDokument3 SeitenAspectos para Profundizar El Curriculolidia paredes ccorahuaNoch keine Bewertungen
- Analisis ERE GURTELDokument3 SeitenAnalisis ERE GURTELdavidtobNoch keine Bewertungen
- Indografia de Abuso de AutoridadDokument1 SeiteIndografia de Abuso de AutoridadEdgar SolorzanoNoch keine Bewertungen
- Guia de Trabajo 1 Aritmética 7ºDokument13 SeitenGuia de Trabajo 1 Aritmética 7ºCarlos PerezNoch keine Bewertungen
- La Hipótesis de Lo InconscienteDokument3 SeitenLa Hipótesis de Lo InconscienteEugenia RobirosaNoch keine Bewertungen
- 1.1 Equipo 3 InvestigacionDokument32 Seiten1.1 Equipo 3 InvestigacionSergio Ariel Santos ValenciaNoch keine Bewertungen
- Atento 2018Dokument118 SeitenAtento 2018Alex QuinteNoch keine Bewertungen
- Carta A Una Señorita en París, Un Cuento NeofantásticoDokument4 SeitenCarta A Una Señorita en París, Un Cuento NeofantásticoMariana Cárdenas GutierrezNoch keine Bewertungen
- Resultados CD Primarias Ter Por Mesa 1Dokument84 SeitenResultados CD Primarias Ter Por Mesa 1Yulitza MoralesNoch keine Bewertungen
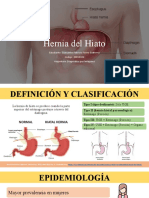
- Hernia Del Hiato - DPIDokument13 SeitenHernia Del Hiato - DPIgiancarlos fabrizioNoch keine Bewertungen
- Procedimiento de Bioseguridad Facultad de EnfermeríaDokument46 SeitenProcedimiento de Bioseguridad Facultad de EnfermeríaDoris Flores TNoch keine Bewertungen
- CUESTIONARIO para MetodologíaDokument3 SeitenCUESTIONARIO para MetodologíaAna AmadoNoch keine Bewertungen
- Informe de Curriculo. Educacion PrebasicaDokument44 SeitenInforme de Curriculo. Educacion PrebasicaAnderson HernandezNoch keine Bewertungen
- Cuestiones de Física: J. Aguilar F. SenentDokument494 SeitenCuestiones de Física: J. Aguilar F. SenentJoshua Wright100% (4)
- Caso TipnisDokument5 SeitenCaso TipnisMireya Condori MancillaNoch keine Bewertungen
- El Lenguaje Verbal de La ImagenDokument7 SeitenEl Lenguaje Verbal de La ImagenMaria Nela AguilarNoch keine Bewertungen
- Banco Popular - Internet Banking PDFDokument1 SeiteBanco Popular - Internet Banking PDFLeonard PolancoNoch keine Bewertungen
- Juego Muntref PDFDokument5 SeitenJuego Muntref PDFAlana CanteroNoch keine Bewertungen
- El Primer Día de ClasesDokument2 SeitenEl Primer Día de ClasesEA NCNoch keine Bewertungen
- La Muerte de Jaime Roldós - Oscar ChiribogaDokument2 SeitenLa Muerte de Jaime Roldós - Oscar ChiribogaEnrrique ZambranoNoch keine Bewertungen
- Tarea de VectoresDokument7 SeitenTarea de VectoresCristhian ChavezNoch keine Bewertungen
- Test de Beck DespresiónDokument4 SeitenTest de Beck DespresiónArela Yancachajlla VladimirNoch keine Bewertungen
- Mezclas Racemicas (Expo) )Dokument11 SeitenMezclas Racemicas (Expo) )CRISYAISAL50% (2)