Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- EngineIzusu6BG1 TRA13forzx240 5GDokument154 SeitenEngineIzusu6BG1 TRA13forzx240 5GGarick Parialpalacio100% (2)
- Hydraulic Excavator: GermanyDokument9 SeitenHydraulic Excavator: GermanyKasidin100% (2)
- Ibmatsudresser: KDC 614 Series Engine Specification Manual SeriesDokument70 SeitenIbmatsudresser: KDC 614 Series Engine Specification Manual SeriesCarlos Romero100% (3)
- List of StandardsDokument37 SeitenList of StandardsJohn JudillaNoch keine Bewertungen
- Honda HTT25S ManualDokument32 SeitenHonda HTT25S ManualTrunk Dang100% (1)
- HBT80C1818Dokument17 SeitenHBT80C1818Rentalmix manutenção um100% (1)
- SMBS - Souvenir 2017Dokument137 SeitenSMBS - Souvenir 2017SukhamMichaelNoch keine Bewertungen
- Compressed Air EngineDokument19 SeitenCompressed Air EngineDevendra Pratap SinghNoch keine Bewertungen
- Traffic Management Investigation StudentDokument273 SeitenTraffic Management Investigation StudentQueenie Mae LucasNoch keine Bewertungen
- Catalogo General Maquinaria y Equipo PDFDokument193 SeitenCatalogo General Maquinaria y Equipo PDFJosé Julian Parra Campos50% (2)
- Training Manual Estrom PDFDokument117 SeitenTraining Manual Estrom PDFRicardo zafraNoch keine Bewertungen
- DLF (Dynamic Limiter Function) Introduction - FE - Rev1.10Dokument17 SeitenDLF (Dynamic Limiter Function) Introduction - FE - Rev1.10Emrah YesiltasNoch keine Bewertungen
- GE V228 and 250 GensetsDokument6 SeitenGE V228 and 250 Gensetsgk218Noch keine Bewertungen
- Detect and Indentity The Cause of Machinery Ma-1Dokument64 SeitenDetect and Indentity The Cause of Machinery Ma-1sukarlem marsiahNoch keine Bewertungen
- General InformationDokument106 SeitenGeneral InformationNova KurniawanNoch keine Bewertungen
- Products: CatalogueDokument52 SeitenProducts: CatalogueMARCELONoch keine Bewertungen
- Ryobi Manual Rltgm25csDokument13 SeitenRyobi Manual Rltgm25csGlenn Michael M. FloresNoch keine Bewertungen
- Deutz 914 o M Manual PDFDokument88 SeitenDeutz 914 o M Manual PDFAgus YulfizarNoch keine Bewertungen
- 2jz Gte Service Manual EngineDokument64 Seiten2jz Gte Service Manual Engine985wtz8rcjNoch keine Bewertungen
- Performance Analysis On 4-S Si Engine Fueled With HHO Gas and LPGDokument7 SeitenPerformance Analysis On 4-S Si Engine Fueled With HHO Gas and LPGCornel BordeiNoch keine Bewertungen
- Small Specalog For Cat D3 Track-Type TractorDokument4 SeitenSmall Specalog For Cat D3 Track-Type Tractorlaptop.bmsNoch keine Bewertungen
- Biting The Bullet - 5 - 6 - 920200414150000 PDFDokument7 SeitenBiting The Bullet - 5 - 6 - 920200414150000 PDFAkshat ChauhanNoch keine Bewertungen
- Cessna 152 A ManualDokument13 SeitenCessna 152 A Manualmikerick747100% (1)
- IS3501 & IS5501: Usage and Maintanence ManualDokument9 SeitenIS3501 & IS5501: Usage and Maintanence ManualPablo LaraNoch keine Bewertungen
- Vta28 G5Dokument2 SeitenVta28 G5singularlyattractive100% (3)
- The S855E Series Is A Purpose Built Forest Duty Shovel LoggerDokument8 SeitenThe S855E Series Is A Purpose Built Forest Duty Shovel Loggertystar_21Noch keine Bewertungen
- Perkins Lovol 1004 SpecDokument2 SeitenPerkins Lovol 1004 SpecMTU65050% (2)
- Iwk 119061 VGF p48gldDokument2 SeitenIwk 119061 VGF p48gldAwaisMughalNoch keine Bewertungen
- WSP Series Self Priming PumpsDokument1 SeiteWSP Series Self Priming PumpsabmopalhvacNoch keine Bewertungen
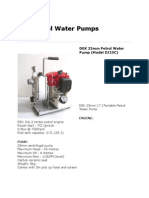
- DEK 25mm Petrol Water Pump (Model DJ25C)Dokument22 SeitenDEK 25mm Petrol Water Pump (Model DJ25C)FathRustLoccoNoch keine Bewertungen