Das könnte Ihnen auch gefallen
- Plate Element Stress - MX - My Vs Global Moment - Bentley - STAAD Products - Eng-TipsDokument2 SeitenPlate Element Stress - MX - My Vs Global Moment - Bentley - STAAD Products - Eng-Tipssom_bs79100% (1)
- FANUC Series 16i 18i 21i Expansion of Custom Macro Interface SignalDokument10 SeitenFANUC Series 16i 18i 21i Expansion of Custom Macro Interface Signalmahdi elmayNoch keine Bewertungen
- 06 - Class 06 - Trade SetupsDokument12 Seiten06 - Class 06 - Trade SetupsChandler BingNoch keine Bewertungen
- Ignazio Basile, Pierpaolo Ferrari (Eds.) - Asset Management and Institutional Investors-Springer International Publishing (2016) PDFDokument469 SeitenIgnazio Basile, Pierpaolo Ferrari (Eds.) - Asset Management and Institutional Investors-Springer International Publishing (2016) PDFrhinolovescokeNoch keine Bewertungen
- Post-Processing APDL Models Inside ANSYS® Workbench v15Dokument26 SeitenPost-Processing APDL Models Inside ANSYS® Workbench v15LK AnhDungNoch keine Bewertungen
- B Lecture1 Introduction Automatic Control SystemDokument29 SeitenB Lecture1 Introduction Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Highway Design ReportDokument27 SeitenHighway Design ReportBrendan Johns100% (1)
- Stress Range Histories and Rain FlowcountingDokument13 SeitenStress Range Histories and Rain FlowcountingM AYGULNoch keine Bewertungen
- ANSYS Stress LinearizationDokument15 SeitenANSYS Stress LinearizationTiago CandeiasNoch keine Bewertungen
- Linearizing StressDokument6 SeitenLinearizing Stressbo cambellNoch keine Bewertungen
- Capital Asset Pricing ModelDokument20 SeitenCapital Asset Pricing ModelSattagouda M PatilNoch keine Bewertungen
- Automation With APDLDokument40 SeitenAutomation With APDLjsmnjasminesNoch keine Bewertungen
- VibrationControl CATALOGO SOPORTES PDFDokument12 SeitenVibrationControl CATALOGO SOPORTES PDFMilena Lemus FonsecaNoch keine Bewertungen
- Philosophy of Mind (Jenkins & Sullivan) (2012)Dokument199 SeitenPhilosophy of Mind (Jenkins & Sullivan) (2012)Claudenicio Ferreira100% (2)
- Root LocusDokument18 SeitenRoot LocusgigoNoch keine Bewertungen
- Cantilever Beam TutorialDokument7 SeitenCantilever Beam TutorialMohammad Ahmad GharaibehNoch keine Bewertungen
- PADT Webinar Post26 2012 - 04 - 12Dokument54 SeitenPADT Webinar Post26 2012 - 04 - 12Jack FusionNoch keine Bewertungen
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDokument15 SeitenB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- B - Lecture6 Time-Domain Specifications Automatic Control SystemDokument18 SeitenB - Lecture6 Time-Domain Specifications Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- B - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemDokument16 SeitenB - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemDokument21 SeitenB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- A Comparison of The Stress Results From Several Commercial Finite Element CodesDokument6 SeitenA Comparison of The Stress Results From Several Commercial Finite Element CodesChang Yong SongNoch keine Bewertungen
- 9 - The Finite Volume Method For Unsteady ProblemsDokument8 Seiten9 - The Finite Volume Method For Unsteady ProblemsAbaziz Mousa OutlawZzNoch keine Bewertungen
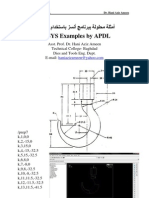
- ANSYS Examples by APDL - Hani Aziz AmeenDokument59 SeitenANSYS Examples by APDL - Hani Aziz AmeenHani Aziz AmeenNoch keine Bewertungen
- ANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenDokument74 SeitenANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenHani Aziz Ameen50% (2)
- Cyclic Symmetry Workbench Version 12Dokument12 SeitenCyclic Symmetry Workbench Version 12Tebong BrowserNoch keine Bewertungen
- Markl SIFs & Asme ViiiDokument3 SeitenMarkl SIFs & Asme ViiiDesmond ChangNoch keine Bewertungen
- 2 - The Finite Volume Method For Diffusion ProblemsDokument23 Seiten2 - The Finite Volume Method For Diffusion ProblemsAbaziz Mousa OutlawZz100% (1)
- AnsysDokument15 SeitenAnsysginupaulNoch keine Bewertungen
- Solid Element Formulation OverviewDokument36 SeitenSolid Element Formulation OverviewasdqwexNoch keine Bewertungen
- Frekans Cevap AnaliziDokument25 SeitenFrekans Cevap AnalizineredemaliNoch keine Bewertungen
- Calculation of Dynamic Stress Intensity Factors For Pipes During Crack Propagation by Dynamic Finite Element AnalysisDokument10 SeitenCalculation of Dynamic Stress Intensity Factors For Pipes During Crack Propagation by Dynamic Finite Element AnalysisMarcelo Varejão CasarinNoch keine Bewertungen
- Hexahedral Element General EquationsDokument9 SeitenHexahedral Element General EquationsSç-č AbabiiNoch keine Bewertungen
- Ansys WoredecmDokument85 SeitenAnsys Woredecmethor0% (1)
- Rigid Surfaces in Ansys WorkbenchDokument5 SeitenRigid Surfaces in Ansys WorkbenchburcakozkokNoch keine Bewertungen
- Estimation of SIF by Mumerical MethodDokument21 SeitenEstimation of SIF by Mumerical Methodworkineh gebeyehuNoch keine Bewertungen
- Ch18 Hexaedron ElementDokument10 SeitenCh18 Hexaedron Elementlittle-wing100% (2)
- Dynamic Systems Mathematical Topics 031906 DYNSYSDokument80 SeitenDynamic Systems Mathematical Topics 031906 DYNSYSjohn_max03Noch keine Bewertungen
- 4 - The Finite Volume Method For Convection-Diffusion Problems - 2Dokument25 Seiten4 - The Finite Volume Method For Convection-Diffusion Problems - 2Abaziz Mousa OutlawZzNoch keine Bewertungen
- The Finite Element Method and Applications in Engineering Using Ansys®Dokument5 SeitenThe Finite Element Method and Applications in Engineering Using Ansys®sivaraju22Noch keine Bewertungen
- Density of Materials & Comparison of Ss 304 Vs Ss316LDokument4 SeitenDensity of Materials & Comparison of Ss 304 Vs Ss316LShino UlahannanNoch keine Bewertungen
- Cyclic Symmetry TopicsDokument73 SeitenCyclic Symmetry TopicsMoisés MachadoNoch keine Bewertungen
- Test Results Velocity: Table 1Dokument2 SeitenTest Results Velocity: Table 1DavidNoch keine Bewertungen
- Chapter 8 - LoadingDokument8 SeitenChapter 8 - LoadingmuhdqasimNoch keine Bewertungen
- Damping SystemDokument6 SeitenDamping SystemEro DoppleganggerNoch keine Bewertungen
- Introduction To The Finite Element Method: G.P.NikishkovDokument32 SeitenIntroduction To The Finite Element Method: G.P.NikishkovsanoizuNoch keine Bewertungen
- Numerical Methods For Scientific and Engineering Computation - M. K. Jain, S. R. K. Iyengar and R. K. JainDokument161 SeitenNumerical Methods For Scientific and Engineering Computation - M. K. Jain, S. R. K. Iyengar and R. K. JainSanket LimbitoteNoch keine Bewertungen
- Implicit LESDokument577 SeitenImplicit LESMasoud Jalali100% (1)
- 1994 Mathematica Laplace InvDokument7 Seiten1994 Mathematica Laplace InvWeny AstutiNoch keine Bewertungen
- EQUIPMENT DESIGN by DR NORIN ZAMIAH PDFDokument104 SeitenEQUIPMENT DESIGN by DR NORIN ZAMIAH PDFAimanNoch keine Bewertungen
- Vibration Sample ProblemDokument24 SeitenVibration Sample ProblemvillanuevamarkdNoch keine Bewertungen
- Under, Over and Critical DampingDokument6 SeitenUnder, Over and Critical Dampingxeron7126Noch keine Bewertungen
- Matlab Report1Dokument2 SeitenMatlab Report1Samy MohamedNoch keine Bewertungen
- Ee5101 Ca1 PDFDokument24 SeitenEe5101 Ca1 PDFHamid FarhanNoch keine Bewertungen
- B - Lecture2 The Laplace Transform Automatic Control SystemDokument32 SeitenB - Lecture2 The Laplace Transform Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Strength of Materials - Stresses in Thin Walled Cylinder - Hani Aziz AmeenDokument13 SeitenStrength of Materials - Stresses in Thin Walled Cylinder - Hani Aziz AmeenHani Aziz Ameen100% (1)
- EE5101 Linear Systems Project Report: Semester - I, 2010/11Dokument22 SeitenEE5101 Linear Systems Project Report: Semester - I, 2010/11Jie RongNoch keine Bewertungen
- Femap UputstvoDokument66 SeitenFemap Uputstvodakiza019-1Noch keine Bewertungen
- Fatigue Life Analysis of RIMS (Using FEA)Dokument4 SeitenFatigue Life Analysis of RIMS (Using FEA)raghavgmailNoch keine Bewertungen
- I.Rajkumar: Introduction To Finite Elements of AnalysisDokument67 SeitenI.Rajkumar: Introduction To Finite Elements of AnalysisRaj KumarNoch keine Bewertungen
- Modeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDDokument24 SeitenModeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDAchmad Nur HusainiNoch keine Bewertungen
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Von EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardNoch keine Bewertungen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- Control System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Dokument49 SeitenControl System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Junaidy VandeanganNoch keine Bewertungen
- Root LocusDokument44 SeitenRoot LocusDheer MehrotraNoch keine Bewertungen
- China (Asia in Focus Series)Dokument525 SeitenChina (Asia in Focus Series)Abaziz Mousa OutlawZz100% (5)
- B - Lecture9 Examples of Steady-State Error Automatic Control SystemDokument3 SeitenB - Lecture9 Examples of Steady-State Error Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Homework 5 Automatic Control SystemDokument1 SeiteHomework 5 Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Homework 4 Automatic Control SystemDokument1 SeiteHomework 4 Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Homework 4 Answer Automatic Control SystemDokument2 SeitenHomework 4 Answer Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- Homework 2 Answer Automatic Control SystemDokument3 SeitenHomework 2 Answer Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- 4 - The Finite Volume Method For Convection-Diffusion Problems - 2Dokument25 Seiten4 - The Finite Volume Method For Convection-Diffusion Problems - 2Abaziz Mousa OutlawZzNoch keine Bewertungen
- Homework 2 Automatic Control SystemDokument1 SeiteHomework 2 Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- B - Lecture2 The Laplace Transform Automatic Control SystemDokument32 SeitenB - Lecture2 The Laplace Transform Automatic Control SystemAbaziz Mousa OutlawZzNoch keine Bewertungen
- 10 Simulations of Turbulence (Cancelled)Dokument53 Seiten10 Simulations of Turbulence (Cancelled)Abaziz Mousa OutlawZzNoch keine Bewertungen
- 3 - The Finite Volume Method For Convection-Diffusion Problems - 1Dokument23 Seiten3 - The Finite Volume Method For Convection-Diffusion Problems - 1Abaziz Mousa OutlawZzNoch keine Bewertungen
- 9 - The Finite Volume Method For Unsteady ProblemsDokument8 Seiten9 - The Finite Volume Method For Unsteady ProblemsAbaziz Mousa OutlawZzNoch keine Bewertungen
- DD2434 Machine Learning, Advanced Course Assignment 2: Jens Lagergren Deadline 23.00 (CET) December 30, 2017Dokument5 SeitenDD2434 Machine Learning, Advanced Course Assignment 2: Jens Lagergren Deadline 23.00 (CET) December 30, 2017Alexandros FerlesNoch keine Bewertungen
- Engineering Economy 3Dokument37 SeitenEngineering Economy 3Steven SengNoch keine Bewertungen
- The Zimmer ProgramDokument7 SeitenThe Zimmer ProgramMichael LipkinNoch keine Bewertungen
- Prospeccion Geoelec Trica en Corrien Te Continua. Ernest0 Orellana. ParaninfoDokument2 SeitenProspeccion Geoelec Trica en Corrien Te Continua. Ernest0 Orellana. ParaninfoGustavo MiguelNoch keine Bewertungen
- Elasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceDokument11 SeitenElasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceJustin Paul VallinanNoch keine Bewertungen
- Express LibraryDokument24 SeitenExpress LibraryPrakhar SikarwarNoch keine Bewertungen
- Rakesh Mandal 180120031Dokument7 SeitenRakesh Mandal 180120031Rakesh RajputNoch keine Bewertungen
- 通訊原理Dokument303 Seiten通訊原理ZenPhiNoch keine Bewertungen
- Gomory's CutsDokument7 SeitenGomory's Cutsgladiator001Noch keine Bewertungen
- Data Mining With Weka: Ian H. WittenDokument33 SeitenData Mining With Weka: Ian H. WittenQuân PhạmNoch keine Bewertungen
- Hima16 SM 11Dokument53 SeitenHima16 SM 11vahid teymooriNoch keine Bewertungen
- Mba 09 41 Strategic Management - SyllabusDokument2 SeitenMba 09 41 Strategic Management - SyllabusVinooj ViswanathanNoch keine Bewertungen
- KianDokument121 SeitenKianKim Tracey LadagaNoch keine Bewertungen
- Playing With Blends in CoreldrawDokument12 SeitenPlaying With Blends in CoreldrawZubairNoch keine Bewertungen
- Dokumen - Tips Stochastic Hydrology Nptel Ref Stochastic Hydrology by Pjayarami Reddy 1997Dokument70 SeitenDokumen - Tips Stochastic Hydrology Nptel Ref Stochastic Hydrology by Pjayarami Reddy 1997Fofo ElorfiNoch keine Bewertungen
- Sum of Series PDFDokument4 SeitenSum of Series PDFmgazimaziNoch keine Bewertungen
- Compulsory Part Paper 2 Question No. Key Question No. KeyDokument10 SeitenCompulsory Part Paper 2 Question No. Key Question No. KeyJOSEPHINENoch keine Bewertungen
- p8 1c MiniaturetrainDokument10 Seitenp8 1c Miniaturetrainapi-249926147Noch keine Bewertungen
- Lab 6 Inductive ReactanceDokument7 SeitenLab 6 Inductive ReactanceJn Guinto0% (1)
- TCS2Dokument5 SeitenTCS2Harinath Yadav ChittiboyenaNoch keine Bewertungen
- STA642 Handouts Topic 1 To 187 by Mahar Afaq Safdar MuhammadDokument1.739 SeitenSTA642 Handouts Topic 1 To 187 by Mahar Afaq Safdar Muhammadhumairamubarak2001Noch keine Bewertungen
- MMW Chapter 3Dokument82 SeitenMMW Chapter 3Marjorie MalvedaNoch keine Bewertungen
- Sotoudeh Zahra 201108 PHDDokument110 SeitenSotoudeh Zahra 201108 PHDnoneofyourbusineesNoch keine Bewertungen