Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Thin Layer Drying Kinetics For Osmotic Dehydrated Coconut Slices in Salt SolutionDokument19 SeitenThin Layer Drying Kinetics For Osmotic Dehydrated Coconut Slices in Salt SolutionIRJIENoch keine Bewertungen
- Mathematical Model of The PMSG Based On Wind Energy Conversion SystemDokument7 SeitenMathematical Model of The PMSG Based On Wind Energy Conversion SystemIRJIENoch keine Bewertungen
- Density Based Traffic Control SystemDokument5 SeitenDensity Based Traffic Control SystemIRJIENoch keine Bewertungen
- Effect of Thickness Variation On Electrical Characteristics of Single & Dual Gate Organic Thin Film TransistorsDokument5 SeitenEffect of Thickness Variation On Electrical Characteristics of Single & Dual Gate Organic Thin Film TransistorsIRJIENoch keine Bewertungen
- Ard Based Elevator Control SystemDokument7 SeitenArd Based Elevator Control SystemIRJIENoch keine Bewertungen
- Semi Automatic Lathe Machine Using ARM ProcessorDokument7 SeitenSemi Automatic Lathe Machine Using ARM ProcessorIRJIENoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ict 2Dokument19 SeitenIct 2Oliver BacsalNoch keine Bewertungen
- IBM Think Pad A, T, and X Series TransNoteDokument32 SeitenIBM Think Pad A, T, and X Series TransNoteberr1ckNoch keine Bewertungen
- Performance Comparison of Scalable Rest Application Programming Interfaces in Different PlatformsDokument30 SeitenPerformance Comparison of Scalable Rest Application Programming Interfaces in Different PlatformsGolang InsightsNoch keine Bewertungen
- Smart Card TechnologyDokument30 SeitenSmart Card TechnologyNidhin Mathew100% (1)
- ITE101 - Living in The IT Era - Week 1 2Dokument10 SeitenITE101 - Living in The IT Era - Week 1 2Maybelle Bernal100% (1)
- Assignment On: "Parallel Algorithm"Dokument4 SeitenAssignment On: "Parallel Algorithm"Ashadul HoqueNoch keine Bewertungen
- Mirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 ConverterDokument1 SeiteMirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 Converterrafaelmartins2010Noch keine Bewertungen
- Cap10 DX75620 Trickytec ENDokument10 SeitenCap10 DX75620 Trickytec ENEdinson Ariel Chavarro QuinteroNoch keine Bewertungen
- MCE Pagemaker 6.5Dokument7 SeitenMCE Pagemaker 6.5Nyutan WankarNoch keine Bewertungen
- Human Fall Detection System: Department of Information TechnologyDokument17 SeitenHuman Fall Detection System: Department of Information Technologyrushabh lalwaniNoch keine Bewertungen
- 59 00 C0-ErrorDokument11 Seiten59 00 C0-ErrorKevon SmallNoch keine Bewertungen
- SAP ASE Performance and Tuning Series Locking and Concurrency ControlDokument130 SeitenSAP ASE Performance and Tuning Series Locking and Concurrency ControlSANTOSH TRIPATHINoch keine Bewertungen
- Programming Fundamentals: Lecture # 1Dokument42 SeitenProgramming Fundamentals: Lecture # 1EAGLE SquadNoch keine Bewertungen
- Pve Admin Guide PDFDokument350 SeitenPve Admin Guide PDFEthewaldo FerreiraNoch keine Bewertungen
- Waste Management ProcedureDokument3 SeitenWaste Management ProcedureRamasubramanian Sankaranarayanan100% (1)
- Safety Fact Sheet 8: Isolation TransformersDokument2 SeitenSafety Fact Sheet 8: Isolation TransformersKheireddine Aounallah100% (1)
- Test Bank For Comptia A Guide To It Technical Support 10th Edition Jean Andrews Joy Dark Jill West 2Dokument14 SeitenTest Bank For Comptia A Guide To It Technical Support 10th Edition Jean Andrews Joy Dark Jill West 2Guadalupe Price100% (35)
- System Software and Machine Architecture Introduction2Dokument3 SeitenSystem Software and Machine Architecture Introduction2SathyapriyaNoch keine Bewertungen
- 057-119 8600 SoftDokument166 Seiten057-119 8600 Softlucas100% (1)
- DocDokument2 SeitenDoclijogkNoch keine Bewertungen
- Postgres AdminDokument109 SeitenPostgres AdminManiSankarNoch keine Bewertungen
- Liberty Port ZTE ZXWM M920 Product DescriptionDokument144 SeitenLiberty Port ZTE ZXWM M920 Product DescriptionBui Cong Bao Kim50% (2)
- ET3491 Embedded and IOT Question BankDokument13 SeitenET3491 Embedded and IOT Question BankBEC 7303100% (1)
- Ade Lab ManualDokument84 SeitenAde Lab ManualRuthwik S GowdaNoch keine Bewertungen
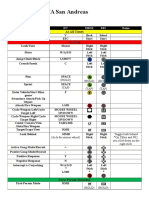
- Controls For GTA San AndreasDokument3 SeitenControls For GTA San AndreasMac AdhiNoch keine Bewertungen
- 8051 Microcontroller and Its Interfacings: CourseDokument3 Seiten8051 Microcontroller and Its Interfacings: CourseAbhijeet RedekarNoch keine Bewertungen
- B550 Aorus Pro Ac B550 Aorus Pro: User's ManualDokument48 SeitenB550 Aorus Pro Ac B550 Aorus Pro: User's ManualCyrah CapiliNoch keine Bewertungen
- Fanuc IC697VRD008 User ManualDokument59 SeitenFanuc IC697VRD008 User ManualsunhuynhNoch keine Bewertungen
- Is 6745 72 PDFDokument17 SeitenIs 6745 72 PDFRAKESH SRIVASTAVANoch keine Bewertungen
- Interrupts in Microprocessor: Types and FunctionDokument12 SeitenInterrupts in Microprocessor: Types and FunctionGowri ShankarNoch keine Bewertungen