Das könnte Ihnen auch gefallen
- Thin Layer Drying Kinetics For Osmotic Dehydrated Coconut Slices in Salt SolutionDokument19 SeitenThin Layer Drying Kinetics For Osmotic Dehydrated Coconut Slices in Salt SolutionIRJIENoch keine Bewertungen
- Mathematical Model of The PMSG Based On Wind Energy Conversion SystemDokument7 SeitenMathematical Model of The PMSG Based On Wind Energy Conversion SystemIRJIENoch keine Bewertungen
- Density Based Traffic Control SystemDokument5 SeitenDensity Based Traffic Control SystemIRJIENoch keine Bewertungen
- Effect of Thickness Variation On Electrical Characteristics of Single & Dual Gate Organic Thin Film TransistorsDokument5 SeitenEffect of Thickness Variation On Electrical Characteristics of Single & Dual Gate Organic Thin Film TransistorsIRJIENoch keine Bewertungen
- Ard Based Elevator Control SystemDokument7 SeitenArd Based Elevator Control SystemIRJIENoch keine Bewertungen
- Semi Automatic Lathe Machine Using ARM ProcessorDokument7 SeitenSemi Automatic Lathe Machine Using ARM ProcessorIRJIENoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Characteristics of A Rectangular WaveguideDokument4 SeitenCharacteristics of A Rectangular WaveguideRavinderNoch keine Bewertungen
- 11 2D00!09!2D00 16HowtoReadaDatasheetDokument45 Seiten11 2D00!09!2D00 16HowtoReadaDatasheetVenvin ChenNoch keine Bewertungen
- Sequential CircuitsDokument11 SeitenSequential CircuitsGoutham RamakrishnanNoch keine Bewertungen
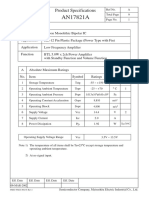
- An17821a PDFDokument9 SeitenAn17821a PDFhectorsevillaNoch keine Bewertungen
- Antenna Assignment SolutionDokument3 SeitenAntenna Assignment SolutionNithyakumar MNoch keine Bewertungen
- Cherrybomb - Ver1 - Colorsound OverdriverDokument6 SeitenCherrybomb - Ver1 - Colorsound OverdriverEmmanuelSanzNoch keine Bewertungen
- LED Audio VU MeterDokument5 SeitenLED Audio VU MetergeislermcNoch keine Bewertungen
- 30 Eth 06Dokument9 Seiten30 Eth 06fonikoNoch keine Bewertungen
- Can Radiation Damage Electronic ComponentsDokument16 SeitenCan Radiation Damage Electronic ComponentsGANDALF AMCANoch keine Bewertungen
- Notes On Tripping RelaysDokument7 SeitenNotes On Tripping RelaysSenthil KumarNoch keine Bewertungen
- Ba00dd0w eDokument20 SeitenBa00dd0w emarius tanjalaNoch keine Bewertungen
- Multiple Choice Questions and Answers On TransistorsDokument16 SeitenMultiple Choice Questions and Answers On TransistorsBreajAdarbe50% (2)
- MotorsDokument31 SeitenMotorsstraffor100% (1)
- ECE 402 - Electronic Circuit Analysis and Design CAIMDokument109 SeitenECE 402 - Electronic Circuit Analysis and Design CAIMMark Niño MagdayoNoch keine Bewertungen
- Ovonic Unified MemoryDokument39 SeitenOvonic Unified MemoryNishantPatelNoch keine Bewertungen
- Pixman 2Dokument8 SeitenPixman 2MR XNoch keine Bewertungen
- HT24LC01/02 CMOS Serial EEPROM Datasheet HoltekDokument8 SeitenHT24LC01/02 CMOS Serial EEPROM Datasheet Holteksydubh72Noch keine Bewertungen
- Introduction To The Different Types of CapacitorsDokument2 SeitenIntroduction To The Different Types of Capacitorsfifthlute9Noch keine Bewertungen
- Power SupplyDokument26 SeitenPower SupplyrezakaihaniNoch keine Bewertungen
- 1res I STA NCE 4 S WI TCH 6 D I ODE 9 7 AMP 3mult IME T E R 9volt 5 Cond E Nser 8batteryDokument3 Seiten1res I STA NCE 4 S WI TCH 6 D I ODE 9 7 AMP 3mult IME T E R 9volt 5 Cond E Nser 8batteryJohan ChaconNoch keine Bewertungen
- Renewable and Sustainable Energy Reviews: Peeyush Kala, Sudha AroraDokument27 SeitenRenewable and Sustainable Energy Reviews: Peeyush Kala, Sudha AroraUvais MustafaNoch keine Bewertungen
- Automatic Greenhouse Watering System and MonitoringDokument25 SeitenAutomatic Greenhouse Watering System and MonitoringAli Uysal100% (3)
- 800 Range Sensor 120ohms Strain GaugeDokument21 Seiten800 Range Sensor 120ohms Strain GaugeBigheti100% (1)
- LCD TV 47LG70 Service ManualDokument36 SeitenLCD TV 47LG70 Service Manualrhignite100% (1)
- Steady-State Analysis and Design of A Switched-Capacitor DC-DC ConverterDokument10 SeitenSteady-State Analysis and Design of A Switched-Capacitor DC-DC ConverterNitu VlsiNoch keine Bewertungen
- Datasheet ULM2083 Relais DriverDokument9 SeitenDatasheet ULM2083 Relais DriverArno StampsNoch keine Bewertungen
- Hart Chapter 10 SolutionsDokument8 SeitenHart Chapter 10 SolutionsCarolina de MeloNoch keine Bewertungen
- 2SK772Dokument4 Seiten2SK772Juan CarlosNoch keine Bewertungen
- 4 - SIPROTEC 7SD60 Numerical Pilot-Wire Current Differential Protection Relay PDFDokument14 Seiten4 - SIPROTEC 7SD60 Numerical Pilot-Wire Current Differential Protection Relay PDFsaina124796010Noch keine Bewertungen
- The Harman Kardon Hk350iDokument44 SeitenThe Harman Kardon Hk350iNeal TexeiraNoch keine Bewertungen