Das könnte Ihnen auch gefallen
- Finite Element Analysis Interview QuestionsDokument7 SeitenFinite Element Analysis Interview QuestionsRajesh Perumal100% (7)
- Design of Foundations For Dynamic LoadsDokument446 SeitenDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Advancements in Solving Ballistic Equations Involving Quadratic DragDokument21 SeitenAdvancements in Solving Ballistic Equations Involving Quadratic DragElliott WallNoch keine Bewertungen
- Physics - Annotated Exemplars Level 3 AS90774Dokument8 SeitenPhysics - Annotated Exemplars Level 3 AS90774Niharika MadaNoch keine Bewertungen
- All HW 303 Fall 17Dokument138 SeitenAll HW 303 Fall 17Muhammad MehadiNoch keine Bewertungen
- Chapter 04-Dynamic Response of Buildings PDFDokument64 SeitenChapter 04-Dynamic Response of Buildings PDFAngelique EsquillaNoch keine Bewertungen
- Structural Dynamics, Therefore, Is A Type ofDokument5 SeitenStructural Dynamics, Therefore, Is A Type ofntah84Noch keine Bewertungen
- Unesco-Eolss Sample Chapters: Structural DynamicsDokument12 SeitenUnesco-Eolss Sample Chapters: Structural DynamicsMohara NascimentoNoch keine Bewertungen
- Introduction To Finite Elements (Matrix Methods)Dokument46 SeitenIntroduction To Finite Elements (Matrix Methods)Paulo FidelisNoch keine Bewertungen
- SCIA5202Dokument67 SeitenSCIA52022BA19CV059 Rakshita SarangmathNoch keine Bewertungen
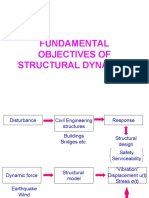
- Fundamental Objectives of Structural DynamicsDokument11 SeitenFundamental Objectives of Structural DynamicsikramNoch keine Bewertungen
- Basics of Vibration DynamicsDokument41 SeitenBasics of Vibration DynamicsPrashanth Babu.KNoch keine Bewertungen
- An Improved Pushover Procedure For Engineering Practice - Incremental Response Spectrum Analysis (IRSA) - M Nurray Aydinoglu, 2004Dokument12 SeitenAn Improved Pushover Procedure For Engineering Practice - Incremental Response Spectrum Analysis (IRSA) - M Nurray Aydinoglu, 2004Benjamin IndrawanNoch keine Bewertungen
- Equations of MotionDokument6 SeitenEquations of MotionDharshan KofiNoch keine Bewertungen
- Vibration Dynamics PDFDokument41 SeitenVibration Dynamics PDFvbhvmht09Noch keine Bewertungen
- Lecture Notes - Linear Elasticity TheoryDokument43 SeitenLecture Notes - Linear Elasticity Theoryzcapg17Noch keine Bewertungen
- Ce 6102: Structural Dynamics: Lecture Notes-1: Introduction (Version 2.1)Dokument8 SeitenCe 6102: Structural Dynamics: Lecture Notes-1: Introduction (Version 2.1)sb1966Noch keine Bewertungen
- CE 6705 Analysis & Design of Buildings Against Hazards: Professor T. BalendraDokument29 SeitenCE 6705 Analysis & Design of Buildings Against Hazards: Professor T. BalendraThet Naing WinNoch keine Bewertungen
- DRG Sesi 5 SDoF Transient ExcitationDokument21 SeitenDRG Sesi 5 SDoF Transient ExcitationanggaNoch keine Bewertungen
- Lecture 4 NotesDokument36 SeitenLecture 4 Notesahmed11 engyemenNoch keine Bewertungen
- LECTURE Statics of Rigid BodiesDokument22 SeitenLECTURE Statics of Rigid BodiesRey Ar OrionNoch keine Bewertungen
- 01 Static & Dynamic AnalysisDokument34 Seiten01 Static & Dynamic AnalysisVijith29Noch keine Bewertungen
- Motion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumDokument6 SeitenMotion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumnasirfahimNoch keine Bewertungen
- Dynamics of Structures: Jorma K. ArrosDokument40 SeitenDynamics of Structures: Jorma K. Arrosjgdm_ingNoch keine Bewertungen
- Module 5 IntroductionDokument8 SeitenModule 5 IntroductionRAHUL NKNoch keine Bewertungen
- Dynamics 1Dokument12 SeitenDynamics 1nicholasomodingNoch keine Bewertungen
- Canada PapersDokument11 SeitenCanada PapersAdriana Daniela SanduNoch keine Bewertungen
- Dynamics: 1.1 KineticsDokument53 SeitenDynamics: 1.1 Kineticsparmeshwar khendakeNoch keine Bewertungen
- Goldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesDokument149 SeitenGoldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesPavan KumarNoch keine Bewertungen
- Newton's Laws, Cartesian and Polar Coordinates, Dynamics of A Single ParticleDokument6 SeitenNewton's Laws, Cartesian and Polar Coordinates, Dynamics of A Single ParticleKaushal BhavsarNoch keine Bewertungen
- M1 Lab ReportDokument6 SeitenM1 Lab Reportweimingf0% (2)
- MFEMD Ch09Dokument10 SeitenMFEMD Ch09Abdel DaaNoch keine Bewertungen
- PHYSICS Alevel AQA 7407 Unit 4 Mechanics and MaterialsDokument41 SeitenPHYSICS Alevel AQA 7407 Unit 4 Mechanics and MaterialsValentina R. RusevaNoch keine Bewertungen
- Physics Formulas ListDokument16 SeitenPhysics Formulas Listjerome meccaNoch keine Bewertungen
- Pre Stressed Modal Analysis Using FiniteDokument8 SeitenPre Stressed Modal Analysis Using Finitegreat2008Noch keine Bewertungen
- Wamit Theory ManualDokument66 SeitenWamit Theory Manualspsingh72Noch keine Bewertungen
- A Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesDokument11 SeitenA Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesAbel Carazas CovinosNoch keine Bewertungen
- Fragility Functions For Seismic Risk in Regions With Moderate SeismicityDokument10 SeitenFragility Functions For Seismic Risk in Regions With Moderate SeismicityScribd2015Noch keine Bewertungen
- A State-of-Knowledge Review On The Endurance Time MethodDokument25 SeitenA State-of-Knowledge Review On The Endurance Time Method陈云龙Noch keine Bewertungen
- Two Body, Central-Force ProblemDokument15 SeitenTwo Body, Central-Force ProblemAvnish GargNoch keine Bewertungen
- 1 - Intro and Rectilinear Motion With ProblemsDokument29 Seiten1 - Intro and Rectilinear Motion With ProblemsSuhaib IntezarNoch keine Bewertungen
- W1 EQE519 Introduction 05102023Dokument30 SeitenW1 EQE519 Introduction 05102023Fatih ÜnlüNoch keine Bewertungen
- Basic Concepts On StaticsDokument6 SeitenBasic Concepts On Staticsmzairun100% (2)
- Structural Dynamics of Earthquake Resistant BuildingsDokument13 SeitenStructural Dynamics of Earthquake Resistant BuildingsAnil KadbhaneNoch keine Bewertungen
- CEI SD 100 Structural Dynamics LR01newDokument24 SeitenCEI SD 100 Structural Dynamics LR01newSahar Aktham RashedNoch keine Bewertungen
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDokument52 SeitenJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishNoch keine Bewertungen
- Lecture 1 SD Introduction 2023Dokument52 SeitenLecture 1 SD Introduction 2023Uttam KarkeeNoch keine Bewertungen
- FCE 401 Chapter 1 and 2Dokument34 SeitenFCE 401 Chapter 1 and 2carl ingariNoch keine Bewertungen
- Physics Formulas and ConceptsDokument23 SeitenPhysics Formulas and ConceptsShivam TiwariNoch keine Bewertungen
- Passive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaDokument10 SeitenPassive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaIngeniero Emmanuel RodriguezNoch keine Bewertungen
- A New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 2012Dokument5 SeitenA New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 2012GustavoNoch keine Bewertungen
- CE 73 Basic Dynamics and Aseismic DesignDokument32 SeitenCE 73 Basic Dynamics and Aseismic DesignarunachelamNoch keine Bewertungen
- A Conceptual Assessment of Dynamic Analysis in RS3Dokument10 SeitenA Conceptual Assessment of Dynamic Analysis in RS3rodrigoNoch keine Bewertungen
- Seismic Response Spectra - A Tool For Seismic Design of StructuresDokument6 SeitenSeismic Response Spectra - A Tool For Seismic Design of StructuresMUNICIPALIDAD SERREZUELANoch keine Bewertungen
- Interpreting Complex PDFDokument9 SeitenInterpreting Complex PDFletter_ashish4444Noch keine Bewertungen
- Earthquake Resistant Design PDFDokument5 SeitenEarthquake Resistant Design PDFgavisita123Noch keine Bewertungen
- Spectral method for fatigue damage estimation with non-zero mean stressVon EverandSpectral method for fatigue damage estimation with non-zero mean stressNoch keine Bewertungen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Noch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsVon EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNoch keine Bewertungen
- Code AsterDokument16 SeitenCode AsterStefano MilaniNoch keine Bewertungen
- Syllabus Civil KuDokument148 SeitenSyllabus Civil KubashuNoch keine Bewertungen
- Heat Transfer WebquestDokument2 SeitenHeat Transfer Webquestapi-268569185100% (1)
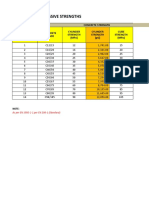
- Concrete Compressive StrengthDokument3 SeitenConcrete Compressive StrengthFranklyn P. Genove100% (1)
- 3 Synchronous PDFDokument16 Seiten3 Synchronous PDFASHOK P R kceNoch keine Bewertungen
- Charles Law Lesson PlanDokument4 SeitenCharles Law Lesson PlanRea Delos ReyesNoch keine Bewertungen
- De Rham-Hodge Theory Lecture NotesDokument28 SeitenDe Rham-Hodge Theory Lecture NotesSteven ScottNoch keine Bewertungen
- Baldassare Di Bartolo - Classical Theory of Electromagnetism-WSPC (2018)Dokument717 SeitenBaldassare Di Bartolo - Classical Theory of Electromagnetism-WSPC (2018)eulerkoss eulerkossNoch keine Bewertungen
- Lab Water Hydrolic JumpDokument4 SeitenLab Water Hydrolic JumpAmirul AimanNoch keine Bewertungen
- Introduction and Basic Concepts: Mohamed ElgabailiDokument51 SeitenIntroduction and Basic Concepts: Mohamed ElgabailiMohammed AlryaniNoch keine Bewertungen
- BoilerDokument17 SeitenBoilerFrederico GarciaNoch keine Bewertungen
- MECH3780 Fluid Mechanics 2 and CFDDokument14 SeitenMECH3780 Fluid Mechanics 2 and CFDninibearNoch keine Bewertungen
- Chapter 13 States of MatterDokument14 SeitenChapter 13 States of MatterbsmithfraneyNoch keine Bewertungen
- Moment Distribution Method: Prof - Kodali SrinivasDokument9 SeitenMoment Distribution Method: Prof - Kodali SrinivasprakashNoch keine Bewertungen
- Experimental Physics SuperpositionDokument17 SeitenExperimental Physics SuperpositionGrace CywrainNoch keine Bewertungen
- Symmetry, Groups and Crystal StructuresDokument4 SeitenSymmetry, Groups and Crystal StructuresAlsodNoch keine Bewertungen
- A Literature Review of Wind Turbines Icing ProblemsDokument8 SeitenA Literature Review of Wind Turbines Icing Problemsrahul parmarNoch keine Bewertungen
- GPAT Physical Pharmacy SyllabusDokument2 SeitenGPAT Physical Pharmacy Syllabuskumar Harsh100% (1)
- Blank 7th Grade Science Midterm Assessment Study Guide 2012 - 2013Dokument5 SeitenBlank 7th Grade Science Midterm Assessment Study Guide 2012 - 2013lauriajNoch keine Bewertungen
- Yield Line Method AppliedDokument144 SeitenYield Line Method AppliedUmed ADA-ALSATARNoch keine Bewertungen
- Thesis Amin Abrishambaf 2015Dokument347 SeitenThesis Amin Abrishambaf 2015Marcelo CarvalhoNoch keine Bewertungen
- A Generalized DQ Impedance Model of Three Phase Diode RectifierDokument8 SeitenA Generalized DQ Impedance Model of Three Phase Diode RectifierRafael Ruiz SalazarNoch keine Bewertungen
- Realization of The Contextuality-Nonlocality Tradeoff With A Qutrit - Qubit Photon PairDokument33 SeitenRealization of The Contextuality-Nonlocality Tradeoff With A Qutrit - Qubit Photon PairGurvir SinghNoch keine Bewertungen
- Formula CompilationDokument6 SeitenFormula CompilationKirstie Alley San JoseNoch keine Bewertungen
- I. Engage: "Phet John Travoltage" Into Your BrowserDokument4 SeitenI. Engage: "Phet John Travoltage" Into Your BrowserEdgarAnwarGonzalezCafuentes0% (1)
- List of Courses-SemV VIIDokument2 SeitenList of Courses-SemV VIIAakash VermaNoch keine Bewertungen
- Tutorial 12 ASPEN PLUS Sensitivity Analysis and Transport PropertiesDokument14 SeitenTutorial 12 ASPEN PLUS Sensitivity Analysis and Transport PropertiesramsrivatsanNoch keine Bewertungen
- Outline of G4Ds Functions and Structure: Summary: The Simulation Tool Uses The Darkside Program'S Detectors (Darkside-10Dokument8 SeitenOutline of G4Ds Functions and Structure: Summary: The Simulation Tool Uses The Darkside Program'S Detectors (Darkside-10ShayNoch keine Bewertungen