Das könnte Ihnen auch gefallen
- Modeling of Complex Systems: Application to Aeronautical DynamicsVon EverandModeling of Complex Systems: Application to Aeronautical DynamicsNoch keine Bewertungen
- Moment of Inertia of A Tennis BallDokument8 SeitenMoment of Inertia of A Tennis BallShaheer ShahzadNoch keine Bewertungen
- Linear Modal Time History Analysis V1.1Dokument13 SeitenLinear Modal Time History Analysis V1.1Ravi TejaNoch keine Bewertungen
- LEP 1.3.19 Laws of Gyroscopes / 3-Axis Gyroscope: Related Topics ProblemsDokument3 SeitenLEP 1.3.19 Laws of Gyroscopes / 3-Axis Gyroscope: Related Topics ProblemsDenis PANoch keine Bewertungen
- Igcse Sample PaperDokument8 SeitenIgcse Sample PaperharshanauocNoch keine Bewertungen
- Chapter 9 RotationDokument7 SeitenChapter 9 RotationHana Lee Jorel ZekeNoch keine Bewertungen
- Ch09 SSM 070904Dokument26 SeitenCh09 SSM 070904VinhTranNoch keine Bewertungen
- Exercise 7 Dynamic Balancing of Rigid RotorsDokument7 SeitenExercise 7 Dynamic Balancing of Rigid RotorsAnonymous dqbb02DUhNoch keine Bewertungen
- Chapter-Ii Introduction To ModellingDokument50 SeitenChapter-Ii Introduction To ModellingAHMEDNoch keine Bewertungen
- Engineering DynamicsDokument22 SeitenEngineering DynamicsfieraminaNoch keine Bewertungen
- Section5 2Dokument7 SeitenSection5 2Hassam BalouchNoch keine Bewertungen
- Final SeminarDokument47 SeitenFinal SeminarGopal KondaguntaNoch keine Bewertungen
- Frictional Torque On A Rotating Disc: Carl E MunganDokument5 SeitenFrictional Torque On A Rotating Disc: Carl E MunganSeethaNoch keine Bewertungen
- Coopertitchener Trifilar1Dokument30 SeitenCoopertitchener Trifilar1api-24490620450% (2)
- Modelling of Rotational Mechanical SystemDokument63 SeitenModelling of Rotational Mechanical SystemIskandar BellNoch keine Bewertungen
- Adaptive State Controller For Inverted Pendulum: Nenad Muškinja, Boris TovornikDokument6 SeitenAdaptive State Controller For Inverted Pendulum: Nenad Muškinja, Boris TovornikNeagu AdrianNoch keine Bewertungen
- Step 1: Mathematical Modeling: 1 Vibration Analysis ProcedureDokument22 SeitenStep 1: Mathematical Modeling: 1 Vibration Analysis ProcedureNirmal JayanthNoch keine Bewertungen
- Trifilar SuspensionDokument14 SeitenTrifilar SuspensionIsfand Ayaz0% (1)
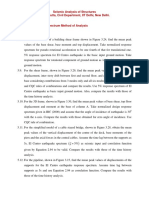
- Exercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New DelhiDokument19 SeitenExercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New Delhitarang shethNoch keine Bewertungen
- Mechanics Inertia of A Rigid BodyDokument16 SeitenMechanics Inertia of A Rigid BodypjcopseNoch keine Bewertungen
- Vibrations 1Dokument10 SeitenVibrations 1boud3Noch keine Bewertungen
- Force Analysis of Machinery: 9.1. Inertia Force and Inertia TorqueDokument16 SeitenForce Analysis of Machinery: 9.1. Inertia Force and Inertia TorqueaddisudagneNoch keine Bewertungen
- 3 Story Seismic AnalysisDokument15 Seiten3 Story Seismic AnalysisKavita Kaur KamthekarNoch keine Bewertungen
- IntroductionDokument9 SeitenIntroductionJM085Noch keine Bewertungen
- Module 1Dokument17 SeitenModule 1robejr2013Noch keine Bewertungen
- Pendulo Doble MotorDokument10 SeitenPendulo Doble Motorjuan alarconNoch keine Bewertungen
- RtgergregDokument13 SeitenRtgergregabod saadehNoch keine Bewertungen
- Rigid Body DynamicsDokument55 SeitenRigid Body DynamicsKenn ConsueloNoch keine Bewertungen
- Adaptive Control of Nonlinear Zero-Bias Current Magnetic Bearing SystemDokument10 SeitenAdaptive Control of Nonlinear Zero-Bias Current Magnetic Bearing SystemDeepak SharmaNoch keine Bewertungen
- Machine Dynamics Lecture Notes SKMDDokument151 SeitenMachine Dynamics Lecture Notes SKMDelizNoch keine Bewertungen
- DOM-I-Force Analysis PDFDokument26 SeitenDOM-I-Force Analysis PDFNaveenKrishNoch keine Bewertungen
- Fe DynamicsDokument29 SeitenFe DynamicsSabih Hashim AlzuhairyNoch keine Bewertungen
- 13 Moment of Inertia and Torque-ProblemsDokument6 Seiten13 Moment of Inertia and Torque-ProblemsMichael Kevin YangNoch keine Bewertungen
- Lecture 3 System ModelingDokument16 SeitenLecture 3 System Modelinganon_412646200Noch keine Bewertungen
- Flywheel Practical ActivityDokument4 SeitenFlywheel Practical ActivityAnonymous FGryb4rEgNNoch keine Bewertungen
- Unit 4 Flywheel: StructureDokument21 SeitenUnit 4 Flywheel: StructureShivam Gupta0% (2)
- Dynamic Lab3a-Briefing SheetDokument9 SeitenDynamic Lab3a-Briefing SheetchauguleNoch keine Bewertungen
- Problems1 5Dokument76 SeitenProblems1 5saroop23Noch keine Bewertungen
- Chapter 10: Rotation 10.1: What Is Physics?: Translational MotionDokument9 SeitenChapter 10: Rotation 10.1: What Is Physics?: Translational MotionSaqr HattabNoch keine Bewertungen
- Kinematics, Dynamics and Mechanical Efficiency of A Cardan Joint With Manufacturing Tolerances - Part IiDokument6 SeitenKinematics, Dynamics and Mechanical Efficiency of A Cardan Joint With Manufacturing Tolerances - Part IiDenis MataNoch keine Bewertungen
- FlywheelsDokument33 SeitenFlywheelsKaranSinghNoch keine Bewertungen
- 1 Viga ColunaDokument27 Seiten1 Viga ColunaFrank JohnNoch keine Bewertungen
- HW09 - Angular Momentum Conservation and GravitationDokument8 SeitenHW09 - Angular Momentum Conservation and GravitationBradley NartowtNoch keine Bewertungen
- Farabi - Dynamicstudyofat - Dynamicstudyofat 35413307Dokument7 SeitenFarabi - Dynamicstudyofat - Dynamicstudyofat 35413307Anonymous 80p9OVNoch keine Bewertungen
- Lecture-6-7-8 Modelling of Mechanical SystemsDokument63 SeitenLecture-6-7-8 Modelling of Mechanical Systemshemal4379100% (1)
- Lab3a 2019Dokument10 SeitenLab3a 2019Olivia PowerNoch keine Bewertungen
- Vibration EngineeringDokument37 SeitenVibration EngineeringAlen Benguit II0% (1)
- Mechanicsssssss ExamplesDokument9 SeitenMechanicsssssss ExamplesJhonrey Joey DesabilleNoch keine Bewertungen
- Solved Problems in VibrationDokument57 SeitenSolved Problems in VibrationRasikaPereraNoch keine Bewertungen
- Moment of Inertia of Different Objects Studied by Using Torsional PendulumDokument8 SeitenMoment of Inertia of Different Objects Studied by Using Torsional PendulumZaeem Ul IslamNoch keine Bewertungen
- Epicyclic Gear Train Write UpDokument8 SeitenEpicyclic Gear Train Write UpkulkajinkyaNoch keine Bewertungen
- GyroscopesDokument35 SeitenGyroscopesSiddharth ChowdhuryNoch keine Bewertungen
- Whirling of Shaft SMM 3 by NITK SurathkalDokument20 SeitenWhirling of Shaft SMM 3 by NITK SurathkalMarilyn PetersNoch keine Bewertungen
- MIN 301 Dynamics of Machines ExperimentsDokument12 SeitenMIN 301 Dynamics of Machines ExperimentsSaifullah AhmadNoch keine Bewertungen
- GyroscopeDokument7 SeitenGyroscopeRajesh SarkarNoch keine Bewertungen
- AMME2500 Assignment 3Dokument12 SeitenAMME2500 Assignment 3Drago6678Noch keine Bewertungen
- Direct Drive and Servo MotorsDokument8 SeitenDirect Drive and Servo MotorsChandaKundaNoch keine Bewertungen
- Lab 126 Darshan PatelDokument7 SeitenLab 126 Darshan PatelDarshan Patel0% (2)
- Experiment 2 Linear Motion: Cet0122.1 - Physics For Engineers LaboratoryDokument3 SeitenExperiment 2 Linear Motion: Cet0122.1 - Physics For Engineers LaboratoryJimuel Ace SarmientoNoch keine Bewertungen
- Full Mechanics Test Paper 13102012 Answers-294Dokument6 SeitenFull Mechanics Test Paper 13102012 Answers-294dev1996Noch keine Bewertungen
- Mecanum Kinematic Analysis 100531 PDFDokument9 SeitenMecanum Kinematic Analysis 100531 PDFKefas JeremiahNoch keine Bewertungen
- Dynamics of A System of ParticlesDokument32 SeitenDynamics of A System of ParticlesIzham IsmailNoch keine Bewertungen
- 7 - Dual Nature of Matter and Radiation PDFDokument16 Seiten7 - Dual Nature of Matter and Radiation PDFthinkiit88% (8)
- Experiment 1: To Verify Bernoulli's' PrincipleDokument24 SeitenExperiment 1: To Verify Bernoulli's' PrincipleRoshan RamNoch keine Bewertungen
- Antenna LecDokument25 SeitenAntenna Lecjosesag518Noch keine Bewertungen
- P0822Dokument4 SeitenP0822Adnan KhaldunNoch keine Bewertungen
- Problem 6D: PracticeDokument3 SeitenProblem 6D: PracticeMason LewisNoch keine Bewertungen
- Radio Controlled Autogiro Aerodynamic DesignDokument54 SeitenRadio Controlled Autogiro Aerodynamic DesignkejnosNoch keine Bewertungen
- Chapter 2Dokument10 SeitenChapter 2abdul azizNoch keine Bewertungen
- Flow Induced Vibrations: March 2006Dokument12 SeitenFlow Induced Vibrations: March 2006Gustavo SanabriaNoch keine Bewertungen
- 12th Science HSC Perfect Physics IIDokument33 Seiten12th Science HSC Perfect Physics IIGul JahanNoch keine Bewertungen
- ExamssssssDokument168 SeitenExamssssssKATHERINE JOY PAROCHANoch keine Bewertungen
- Gas 12 2nd QuarterDokument2 SeitenGas 12 2nd QuarterRoldan OrmillaNoch keine Bewertungen
- Lift Pulley PresentationDokument9 SeitenLift Pulley PresentationNg JunqiNoch keine Bewertungen
- Work and Energy Formula SheetDokument3 SeitenWork and Energy Formula SheetimkushofficialNoch keine Bewertungen
- Precession and Nutation of A Gyroscope Ue1040500 Ue1040500: Spinning Mo T IonDokument1 SeitePrecession and Nutation of A Gyroscope Ue1040500 Ue1040500: Spinning Mo T IonZiad Al-ZeinNoch keine Bewertungen
- Assignment-3 (Motion in A Plane)Dokument7 SeitenAssignment-3 (Motion in A Plane)krishnam rajuNoch keine Bewertungen
- Chapter 3Dokument53 SeitenChapter 3orangesweetsauceNoch keine Bewertungen
- 2 - Aerodynamics - 2 - LiftDokument14 Seiten2 - Aerodynamics - 2 - LiftChetanNoch keine Bewertungen
- Quadrotor Trajectory Tracking Using PID Cascade ControlDokument7 SeitenQuadrotor Trajectory Tracking Using PID Cascade ControlNeide AparecidaNoch keine Bewertungen
- NotesDokument92 SeitenNotesChrise RajNoch keine Bewertungen
- Takeoff ResumenDokument10 SeitenTakeoff ResumenoibNoch keine Bewertungen
- Nautical PhysicsDokument26 SeitenNautical PhysicsLorina Lynne Apelacio100% (1)
- Physics Trilogy WavesDokument9 SeitenPhysics Trilogy WavesisheanesuNoch keine Bewertungen
- Harvard Physics Circle 2021 ExamDokument8 SeitenHarvard Physics Circle 2021 Examsreedharbharath100% (1)
- CBSE Class 11 Physics Newton's Laws of MotionDokument79 SeitenCBSE Class 11 Physics Newton's Laws of MotionMadhav LohchabNoch keine Bewertungen
- Reynolds ExperimentDokument13 SeitenReynolds ExperimentAngelia Maharani Putri LeanNoch keine Bewertungen