Das könnte Ihnen auch gefallen
- Cscan 788Dokument9 SeitenCscan 788Adin AdinaNoch keine Bewertungen
- An Iterative Mitchell's Algorithm Based MultiplierDokument6 SeitenAn Iterative Mitchell's Algorithm Based Multiplieraditya_me123Noch keine Bewertungen
- Efficient LLR Calculation For Non-Binary Modulations Over Fading ChannelsDokument14 SeitenEfficient LLR Calculation For Non-Binary Modulations Over Fading Channelsmkrao_kiranNoch keine Bewertungen
- DSP AssignmentDokument8 SeitenDSP Assignmentanoopk222Noch keine Bewertungen
- Constrained Approximation and Mixed CriteriaDokument26 SeitenConstrained Approximation and Mixed CriteriaShihab SamNoch keine Bewertungen
- Low-Power Design of Reed-Solomon Encoders: Wei Zhang, Jing Wang Xinmiao ZhangDokument4 SeitenLow-Power Design of Reed-Solomon Encoders: Wei Zhang, Jing Wang Xinmiao ZhangKrishna PrasadNoch keine Bewertungen
- Safe and Effective Determinant Evaluation: February 25, 1994Dokument16 SeitenSafe and Effective Determinant Evaluation: February 25, 1994David ImmanuelNoch keine Bewertungen
- Seampless Pipelined PDFDokument6 SeitenSeampless Pipelined PDFCherry AnushaNoch keine Bewertungen
- Analyzing and Comparing Montgomery Multiplication AlgorithmsDokument18 SeitenAnalyzing and Comparing Montgomery Multiplication AlgorithmsNandha KumarNoch keine Bewertungen
- 2014 PR Unsupervised Segmentation and Approximation of Digital Curves With Rate-distortion Curve ModelingDokument11 Seiten2014 PR Unsupervised Segmentation and Approximation of Digital Curves With Rate-distortion Curve ModelingAlexander KolesnikovNoch keine Bewertungen
- Brent ElementaryDokument10 SeitenBrent ElementaryLovinf FlorinNoch keine Bewertungen
- Analytical Validation of LTE SimulatorDokument5 SeitenAnalytical Validation of LTE SimulatorkaviarasanNoch keine Bewertungen
- Large Margin Multi Channel Analog To Digital Conversion With Applications To Neural ProsthesisDokument8 SeitenLarge Margin Multi Channel Analog To Digital Conversion With Applications To Neural ProsthesisAdrian PostavaruNoch keine Bewertungen
- Sparse Implementation of Revised Simplex Algorithms On Parallel ComputersDokument8 SeitenSparse Implementation of Revised Simplex Algorithms On Parallel ComputersKaram SalehNoch keine Bewertungen
- Viterbi DecodingDokument4 SeitenViterbi DecodingGaurav NavalNoch keine Bewertungen
- Low-Power DSP ApproachesDokument22 SeitenLow-Power DSP ApproachesHarish KumarNoch keine Bewertungen
- Near-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignDokument5 SeitenNear-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignNguyễn Minh TrìnhNoch keine Bewertungen
- Designing Microwave Filters in MATLABDokument8 SeitenDesigning Microwave Filters in MATLABZeeshan AhmedNoch keine Bewertungen
- Three Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlDokument29 SeitenThree Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlPankaj SahlotNoch keine Bewertungen
- ADC Dynamic ErrorsDokument34 SeitenADC Dynamic ErrorsPranavateja ChilukuriNoch keine Bewertungen
- Viterbi AlgorithmDokument6 SeitenViterbi AlgorithmMonty PythoniteNoch keine Bewertungen
- Ex 2 SolutionDokument13 SeitenEx 2 SolutionMian AlmasNoch keine Bewertungen
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDokument8 SeitenNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNoch keine Bewertungen
- ErrorRecovery3.15 ForsubmissionDokument15 SeitenErrorRecovery3.15 Forsubmission430 Naga RushitaNoch keine Bewertungen
- A Direct Digital Frequency Synthesizer Utilizing Quasi-Linear Interpolation MethodDokument5 SeitenA Direct Digital Frequency Synthesizer Utilizing Quasi-Linear Interpolation MethodYermakov Vadim IvanovichNoch keine Bewertungen
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDokument16 SeitenA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranNoch keine Bewertungen
- Reducing The Error Floors of Turbo Codes That Use Structured InterleaversDokument5 SeitenReducing The Error Floors of Turbo Codes That Use Structured InterleaversseventhsensegroupNoch keine Bewertungen
- Iterative Soft Decision Based Complex K-Best MIMO DecoderDokument12 SeitenIterative Soft Decision Based Complex K-Best MIMO DecoderAI Coordinator - CSC Journals100% (1)
- LNS-Low Power IC DesignDokument23 SeitenLNS-Low Power IC DesignAravind AakashNoch keine Bewertungen
- 0742 Clu Ever 2005Dokument4 Seiten0742 Clu Ever 2005Samir ChouchaneNoch keine Bewertungen
- Itt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Dokument8 SeitenItt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Luisa De CairesNoch keine Bewertungen
- Architecture Design For An Adaptive Equalizer: 2 LMS and Its VariantsDokument6 SeitenArchitecture Design For An Adaptive Equalizer: 2 LMS and Its Variantsfardeen123Noch keine Bewertungen
- Lee Yang ReportDokument14 SeitenLee Yang ReportauroshisdasNoch keine Bewertungen
- A Ce Lte Almmse ImplDokument5 SeitenA Ce Lte Almmse ImplnogoodskamNoch keine Bewertungen
- Tornado Codes and Luby Transform Codes PDFDokument12 SeitenTornado Codes and Luby Transform Codes PDFpathmakerpkNoch keine Bewertungen
- Linear Congruential Generator (LCG) Is AnDokument12 SeitenLinear Congruential Generator (LCG) Is AnMarcos MarcosNoch keine Bewertungen
- Illuminating the Structure and Decoder of Parallel Concatenated Turbo CodesDokument6 SeitenIlluminating the Structure and Decoder of Parallel Concatenated Turbo Codessinne4Noch keine Bewertungen
- Cockrum Fall 2008 Final PaperDokument15 SeitenCockrum Fall 2008 Final Papernayeem4444Noch keine Bewertungen
- Reduced-Complexity LLL Algorithm For Lattice-Reduction-Aided MIMO DetectionDokument5 SeitenReduced-Complexity LLL Algorithm For Lattice-Reduction-Aided MIMO DetectionRasool FarajiNoch keine Bewertungen
- JORDAAN2002 - Estimation of The Regularization Parameter For SVRDokument6 SeitenJORDAAN2002 - Estimation of The Regularization Parameter For SVRAnonymous PsEz5kGVaeNoch keine Bewertungen
- Montgomery Reduction With Even ModulusDokument6 SeitenMontgomery Reduction With Even ModulusNeeraj KalraNoch keine Bewertungen
- 6 1457766064 - 12-03-2016 PDFDokument4 Seiten6 1457766064 - 12-03-2016 PDFEditor IJRITCCNoch keine Bewertungen
- Image Compression Using Curvelet TransformDokument21 SeitenImage Compression Using Curvelet Transformramnag4Noch keine Bewertungen
- 4 Numbers and MatricesDokument26 Seiten4 Numbers and MatricesSara Quintana HornaNoch keine Bewertungen
- Analyzing Montgomery Multiplication Algorithms: CIOS Method Most EfficientDokument18 SeitenAnalyzing Montgomery Multiplication Algorithms: CIOS Method Most EfficientgonxorNoch keine Bewertungen
- An Improved Data Stream SummaryDokument18 SeitenAn Improved Data Stream SummaryMH DevNoch keine Bewertungen
- Sum Subt Fix Point LDPC DecDokument12 SeitenSum Subt Fix Point LDPC Decjorge castiñeiraNoch keine Bewertungen
- Truncated Multiplication With Correction ConstantDokument9 SeitenTruncated Multiplication With Correction ConstantAnonymous 05HygKNoch keine Bewertungen
- Low-Density Parity-Check Codes Over Gaussian Channels With ErasuresDokument9 SeitenLow-Density Parity-Check Codes Over Gaussian Channels With ErasuresBoazShuvalNoch keine Bewertungen
- Performance Analysis of Convolutional Coding in CDMA Communication SystemsDokument8 SeitenPerformance Analysis of Convolutional Coding in CDMA Communication SystemsAnonymous S2HNoKmkNoch keine Bewertungen
- Design of Multichannel AP-DCD Algorithm Using Matlab: Sasmita DeoDokument5 SeitenDesign of Multichannel AP-DCD Algorithm Using Matlab: Sasmita DeoParamesh WaranNoch keine Bewertungen
- Performance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersDokument5 SeitenPerformance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersMasterArvinNoch keine Bewertungen
- Logarithmic MultiplierDokument14 SeitenLogarithmic MultiplierRutul PatelNoch keine Bewertungen
- Floating-Point Bitwidth Analysis Via Automatic DifferentiationDokument8 SeitenFloating-Point Bitwidth Analysis Via Automatic Differentiationarthur-pham-5188Noch keine Bewertungen
- BER and PAPR Reduction Using Companding Algorithms in OFDMDokument5 SeitenBER and PAPR Reduction Using Companding Algorithms in OFDMInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- OFDM Simulation EE810Dokument18 SeitenOFDM Simulation EE810Ashique Mahmood100% (1)
- balogh_imtc10Dokument6 Seitenbalogh_imtc10Madhusmita PandaNoch keine Bewertungen
- Numerically Controlled Oscillator With Spur Reduction: Hans-Jörg Pfleiderer Stefan LachowiczDokument4 SeitenNumerically Controlled Oscillator With Spur Reduction: Hans-Jörg Pfleiderer Stefan LachowiczRaffi SkNoch keine Bewertungen
- Case Study: Implementation of 5S Methodology in JCB Assembly Business Unit Material StorageDokument6 SeitenCase Study: Implementation of 5S Methodology in JCB Assembly Business Unit Material StorageInnovative Research PublicationsNoch keine Bewertungen
- Named Data NetworkingDokument2 SeitenNamed Data NetworkingInnovative Research PublicationsNoch keine Bewertungen
- Analysis On Quenching Cracks of Engine CrankshaftDokument4 SeitenAnalysis On Quenching Cracks of Engine CrankshaftInnovative Research PublicationsNoch keine Bewertungen
- Analysis On The Generation and Control of Strip Defects On The Surface of Color Coated PlatesDokument3 SeitenAnalysis On The Generation and Control of Strip Defects On The Surface of Color Coated PlatesInnovative Research PublicationsNoch keine Bewertungen
- Social Network Analysis For Web-Based CommunityDokument4 SeitenSocial Network Analysis For Web-Based CommunityInnovative Research PublicationsNoch keine Bewertungen
- Fluoride Removal Efficiency of Commercially Available Reverse Osmosis Water Purifying Systems in Removing Fluoride Ions From Drinking Water in IndiaDokument4 SeitenFluoride Removal Efficiency of Commercially Available Reverse Osmosis Water Purifying Systems in Removing Fluoride Ions From Drinking Water in IndiaInnovative Research PublicationsNoch keine Bewertungen
- Rainfall-Runoff Modeling Using Artificial Neural Networks and HEC - HMS (Case Study: Catchment of Gharasoo)Dokument4 SeitenRainfall-Runoff Modeling Using Artificial Neural Networks and HEC - HMS (Case Study: Catchment of Gharasoo)Innovative Research PublicationsNoch keine Bewertungen
- Power Transformer Protection Using Fuzzy Logic Based ControllerDokument5 SeitenPower Transformer Protection Using Fuzzy Logic Based ControllerInnovative Research PublicationsNoch keine Bewertungen
- The Experimental Study of Eccentric Loadingfor Piled Raft Foundations Settling On Slope CrestDokument5 SeitenThe Experimental Study of Eccentric Loadingfor Piled Raft Foundations Settling On Slope CrestInnovative Research PublicationsNoch keine Bewertungen
- Structural Analysis of A Charcoal Sieving Machine Under Dynamic LoadDokument3 SeitenStructural Analysis of A Charcoal Sieving Machine Under Dynamic LoadInnovative Research PublicationsNoch keine Bewertungen
- Design of Quick-Sensing Device For Temperature Difference Generation Environment Based On Single Chip MicrocomputerDokument3 SeitenDesign of Quick-Sensing Device For Temperature Difference Generation Environment Based On Single Chip MicrocomputerInnovative Research PublicationsNoch keine Bewertungen
- 3D Modeling of Complex Structure Based On AutoCAD VBADokument3 Seiten3D Modeling of Complex Structure Based On AutoCAD VBAInnovative Research PublicationsNoch keine Bewertungen
- Review of The Development of Several True 3D Display TechnologyDokument5 SeitenReview of The Development of Several True 3D Display TechnologyInnovative Research PublicationsNoch keine Bewertungen
- Computational EconomicsDokument2 SeitenComputational EconomicsInnovative Research PublicationsNoch keine Bewertungen
- Information EngineeringDokument2 SeitenInformation EngineeringInnovative Research PublicationsNoch keine Bewertungen
- Information EngineeringDokument2 SeitenInformation EngineeringInnovative Research PublicationsNoch keine Bewertungen
- Wearable ComputingDokument3 SeitenWearable ComputingInnovative Research PublicationsNoch keine Bewertungen
- Surveillance NetworksDokument2 SeitenSurveillance NetworksInnovative Research PublicationsNoch keine Bewertungen
- Estimating Sea Level Change at The Egyptian Coasts Using Different Data SourcesDokument9 SeitenEstimating Sea Level Change at The Egyptian Coasts Using Different Data SourcesInnovative Research PublicationsNoch keine Bewertungen
- Preliminary Study On Dimocarpus Longan Peel As Inhibitors For The Pitting Corrosion of 5052-O and 6061-O Aluminium Alloys in Artificial Brine SolutionDokument4 SeitenPreliminary Study On Dimocarpus Longan Peel As Inhibitors For The Pitting Corrosion of 5052-O and 6061-O Aluminium Alloys in Artificial Brine SolutionInnovative Research PublicationsNoch keine Bewertungen
- Online Laboratory: Roy G. Perry College of Engineering Prairie View A&M University Prairie View, TX 77446Dokument2 SeitenOnline Laboratory: Roy G. Perry College of Engineering Prairie View A&M University Prairie View, TX 77446Innovative Research PublicationsNoch keine Bewertungen
- Internet AddictionDokument2 SeitenInternet AddictionInnovative Research PublicationsNoch keine Bewertungen
- Computational ElectromagneticsDokument3 SeitenComputational ElectromagneticsInnovative Research PublicationsNoch keine Bewertungen
- Mobile InternetDokument2 SeitenMobile InternetInnovative Research PublicationsNoch keine Bewertungen
- Identity TheftDokument3 SeitenIdentity TheftInnovative Research PublicationsNoch keine Bewertungen
- Comparative Print Quality Analysis of Screen Printing and Liquid Ink Based Digital Printing MachinesDokument3 SeitenComparative Print Quality Analysis of Screen Printing and Liquid Ink Based Digital Printing MachinesInnovative Research PublicationsNoch keine Bewertungen
- Computational Physics: An IntroductionDokument2 SeitenComputational Physics: An IntroductionInnovative Research PublicationsNoch keine Bewertungen
- Role of Coaching Institutes in IndiaDokument5 SeitenRole of Coaching Institutes in IndiaInnovative Research PublicationsNoch keine Bewertungen
- Effect of Alccofine and Foundry Slag On Compressive Strength of High Strength ConcreteDokument4 SeitenEffect of Alccofine and Foundry Slag On Compressive Strength of High Strength ConcreteInnovative Research PublicationsNoch keine Bewertungen
- CAD For IC Design Handout 2018-2019Dokument2 SeitenCAD For IC Design Handout 2018-2019bkgp1994Noch keine Bewertungen
- Instruction Manual EDB245-420 1Dokument30 SeitenInstruction Manual EDB245-420 1rpshvjuNoch keine Bewertungen
- Embedded SW Development With ECosDokument35 SeitenEmbedded SW Development With ECosRakesh MenonNoch keine Bewertungen
- 08 Engine MechanicalDokument80 Seiten08 Engine MechanicalmadcostaNoch keine Bewertungen
- Arunabh CV Rev1.2 PDFDokument3 SeitenArunabh CV Rev1.2 PDFArunabh RayNoch keine Bewertungen
- Linux Process ManagementDokument3 SeitenLinux Process ManagementavadcsNoch keine Bewertungen
- Assmbler 1Dokument28 SeitenAssmbler 1B GowdaNoch keine Bewertungen
- Windows SDK Tools ListingDokument8 SeitenWindows SDK Tools ListingVivek MGNoch keine Bewertungen
- Packages On Db2 Udb: Datadirect Connect Series Odbc DriversDokument8 SeitenPackages On Db2 Udb: Datadirect Connect Series Odbc DriversrajiNoch keine Bewertungen
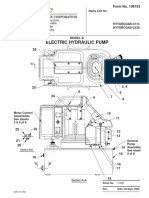
- D - Bomba Hidraulica - Qas-C230 - Hytorc PDFDokument16 SeitenD - Bomba Hidraulica - Qas-C230 - Hytorc PDFGabriel Torres Bentura100% (3)
- DBMS Questions and AnswersDokument69 SeitenDBMS Questions and AnswersAkash Jain81% (16)
- W510tu EsmDokument86 SeitenW510tu Esmselçuk avcıNoch keine Bewertungen
- Nullpomino Readme 188223Dokument23 SeitenNullpomino Readme 188223a8bakergaergiaNoch keine Bewertungen
- Gennum Video Broadcast GuideDokument16 SeitenGennum Video Broadcast GuideacharlessNoch keine Bewertungen
- OS Lecture Notes 3-5Dokument67 SeitenOS Lecture Notes 3-5DavidNoch keine Bewertungen
- Easa Basic Computer StructureDokument33 SeitenEasa Basic Computer StructureAlaa MortadaNoch keine Bewertungen
- Honda Maintenance RevereDokument18 SeitenHonda Maintenance ReverefrankkiniNoch keine Bewertungen
- Post Graduate Common Entrance Test-2017Dokument15 SeitenPost Graduate Common Entrance Test-2017ajsfNoch keine Bewertungen
- Datasheet SC1000CP-XT English V10 ExtDokument4 SeitenDatasheet SC1000CP-XT English V10 ExtPikesh JainNoch keine Bewertungen
- Keil C Programming TutorialDokument24 SeitenKeil C Programming TutorialBhautik DaxiniNoch keine Bewertungen
- CS 2842 Computer Systems ExamDokument4 SeitenCS 2842 Computer Systems Examindula123Noch keine Bewertungen
- Ata 23 Anti Hijack PDFDokument14 SeitenAta 23 Anti Hijack PDFAaron HarveyNoch keine Bewertungen
- LCD Panel Service Training GuideDokument60 SeitenLCD Panel Service Training GuideDa ElNoch keine Bewertungen
- Yamaha Music Production GuideDokument35 SeitenYamaha Music Production GuideDavid MartensNoch keine Bewertungen
- AX3000G PresetDokument2 SeitenAX3000G PresetRonjoy BarthakurNoch keine Bewertungen
- Jatin Mer CVDokument7 SeitenJatin Mer CVsumitNoch keine Bewertungen
- MIPS Architecture and Assembly Language Overview: Register Description I/O DescriptionDokument9 SeitenMIPS Architecture and Assembly Language Overview: Register Description I/O DescriptionCaed ShabarNoch keine Bewertungen
- Clonezilla - Free Hard Drive Cloning Software ReviewDokument4 SeitenClonezilla - Free Hard Drive Cloning Software ReviewRyan Jay BaluteNoch keine Bewertungen
- European Recommendations For Sandwich Panels PDFDokument2 SeitenEuropean Recommendations For Sandwich Panels PDFRochelleNoch keine Bewertungen
- MT8121iE: FeatureDokument2 SeitenMT8121iE: FeatureDondoNoch keine Bewertungen