Das könnte Ihnen auch gefallen
- Robert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDokument254 SeitenRobert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDang Dinh DongNoch keine Bewertungen
- Lab # 6 Time Response AnalysisDokument10 SeitenLab # 6 Time Response AnalysisFahad AneebNoch keine Bewertungen
- ChE 441 - Process Control Student NotesDokument207 SeitenChE 441 - Process Control Student NotesDavidTobinNoch keine Bewertungen
- ME8511 Kinematics and Dynamics Laboratory Notes Regulation 2017 - Semester 5 - Anna University NotesDokument2 SeitenME8511 Kinematics and Dynamics Laboratory Notes Regulation 2017 - Semester 5 - Anna University NotesMohan Kumar22% (9)
- EE331 - L09 - Signals & SystemsDokument51 SeitenEE331 - L09 - Signals & Systemsahmetyasinbulut99Noch keine Bewertungen
- Signal and System Lecture 19Dokument15 SeitenSignal and System Lecture 19ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 23Dokument12 SeitenSignal and System Lecture 23ali_rehman87Noch keine Bewertungen
- Lecture-2 Transfer FunctionDokument32 SeitenLecture-2 Transfer FunctionMuneeb JawaidNoch keine Bewertungen
- Transfer FunctionDokument34 SeitenTransfer FunctionRIMSHA KHURSHID100% (1)
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument35 SeitenControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanNoch keine Bewertungen
- EE331 - L10 - Signals & SystemsDokument37 SeitenEE331 - L10 - Signals & Systemsahmetyasinbulut99Noch keine Bewertungen
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument29 SeitenFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoNoch keine Bewertungen
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDokument30 SeitenFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNoch keine Bewertungen
- Poles Zeros and Z TransformDokument12 SeitenPoles Zeros and Z TransformAhosan HabibNoch keine Bewertungen
- Dynamical Systems and Chaos: CAS Spring 2008Dokument31 SeitenDynamical Systems and Chaos: CAS Spring 2008Kasra ManiNoch keine Bewertungen
- Lecture17 PDFDokument19 SeitenLecture17 PDFAriesFranandaPanjaitanNoch keine Bewertungen
- CS - II (Laplace and M Modelling)Dokument63 SeitenCS - II (Laplace and M Modelling)abdul.baseerNoch keine Bewertungen
- Advanced Control Systems (ACS) : Transfer Function and Stability of LTI SystemsDokument22 SeitenAdvanced Control Systems (ACS) : Transfer Function and Stability of LTI SystemsFahmeed Ali MeoNoch keine Bewertungen
- Microelectronics Chapter 05Dokument19 SeitenMicroelectronics Chapter 05Sanskar BiswalNoch keine Bewertungen
- More General Transfer Function Models: Bs Gs AsDokument21 SeitenMore General Transfer Function Models: Bs Gs As李承家Noch keine Bewertungen
- Transform Analysis of LTI SystemsDokument62 SeitenTransform Analysis of LTI Systemshakkem bNoch keine Bewertungen
- CS 16 JntukDokument30 SeitenCS 16 JntukKavya MamillaNoch keine Bewertungen
- Control Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI SystemsDokument41 SeitenControl Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI Systemskamranzeb057Noch keine Bewertungen
- Control Systems and Engineering Lesson 4Dokument49 SeitenControl Systems and Engineering Lesson 4EdrielleNoch keine Bewertungen
- Control Chapter 1 - Lecture 1Dokument29 SeitenControl Chapter 1 - Lecture 13re0oooNoch keine Bewertungen
- A Seminar On: " Transform Analysis of Sampled-Data Systems"Dokument35 SeitenA Seminar On: " Transform Analysis of Sampled-Data Systems"BHAVNA AGARWALNoch keine Bewertungen
- Chapter5 130401031918 Phpapp01 PDFDokument34 SeitenChapter5 130401031918 Phpapp01 PDFSiraj MohammedNoch keine Bewertungen
- Laplace Tansform & The InverseDokument24 SeitenLaplace Tansform & The InverseFiga Aghani RosyidNoch keine Bewertungen
- Lecture 7 & 8 (Stability Analysis)Dokument35 SeitenLecture 7 & 8 (Stability Analysis)muhammad hamzaNoch keine Bewertungen
- Introduction To Control SystemsDokument37 SeitenIntroduction To Control SystemsZAFRAN OFFICIALNoch keine Bewertungen
- Transfer Function Basics & Transfer Function and StabilityDokument31 SeitenTransfer Function Basics & Transfer Function and StabilityArvind kumar PrajapatiNoch keine Bewertungen
- Lab 3: Difference Equations, Z-Transform, Pole-Zero Diagrams, BIBO Stability and Quantization EffectsDokument5 SeitenLab 3: Difference Equations, Z-Transform, Pole-Zero Diagrams, BIBO Stability and Quantization EffectsJane MoujaessNoch keine Bewertungen
- Analyze Stability of Causal System: Application of Laplace TransformDokument13 SeitenAnalyze Stability of Causal System: Application of Laplace TransformAbdullah WaqasNoch keine Bewertungen
- Ch.2 - Part 1 of ADICDokument90 SeitenCh.2 - Part 1 of ADICTestAutomationSel2020Noch keine Bewertungen
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument37 SeitenControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsSuyash Dahake VlogsNoch keine Bewertungen
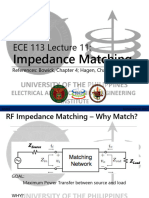
- Ece113 Lec11 Impedance MatchingDokument50 SeitenEce113 Lec11 Impedance Matching許耕立Noch keine Bewertungen
- Course 10 - Laplace 2Dokument32 SeitenCourse 10 - Laplace 2ali fulanNoch keine Bewertungen
- Week#06Dokument39 SeitenWeek#06Yahya MateenNoch keine Bewertungen
- Chapter 1. Digital Control System-1Dokument79 SeitenChapter 1. Digital Control System-1Dereje Shiferaw100% (1)
- Signal and System Lecture 22Dokument20 SeitenSignal and System Lecture 22ali_rehman87Noch keine Bewertungen
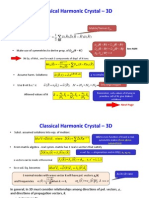
- Classical Harmonic Crystal - 3DDokument3 SeitenClassical Harmonic Crystal - 3DtxtanveerNoch keine Bewertungen
- Advances in Robotics Lecture 3Dokument76 SeitenAdvances in Robotics Lecture 3AkashNoch keine Bewertungen
- Laplace TransformDokument98 SeitenLaplace TransformMihail ColunNoch keine Bewertungen
- Signal and System Lecture 21Dokument22 SeitenSignal and System Lecture 21ali_rehman87Noch keine Bewertungen
- CH 2Dokument23 SeitenCH 2wehabekodaNoch keine Bewertungen
- CH 3Dokument91 SeitenCH 3wehabekodaNoch keine Bewertungen
- EE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidDokument26 SeitenEE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidSana SaadNoch keine Bewertungen
- Lecture 2 - ME2617 Free Motion of Damped SystemsDokument33 SeitenLecture 2 - ME2617 Free Motion of Damped SystemsHamzah QadriNoch keine Bewertungen
- Control Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsDokument80 SeitenControl Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsSuyash Dahake VlogsNoch keine Bewertungen
- Module 2b - TF of Electrical and Mechanical SystemsDokument61 SeitenModule 2b - TF of Electrical and Mechanical SystemsSyed Muhammad AliNoch keine Bewertungen
- Chapter 3 - Stability of Control SystemDokument99 SeitenChapter 3 - Stability of Control SystemTân NguyễnNoch keine Bewertungen
- Tuning The Leading Roots of A Second Order DC Servomotor With Proportional Retarded ControlDokument6 SeitenTuning The Leading Roots of A Second Order DC Servomotor With Proportional Retarded ControlKOKONoch keine Bewertungen
- CS Chapter 8Dokument113 SeitenCS Chapter 8Mynam MeghanaNoch keine Bewertungen
- Load Flow OverviewDokument23 SeitenLoad Flow OverviewAshish MishraNoch keine Bewertungen
- Unit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems IDokument6 SeitenUnit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems INikhil PanikkarNoch keine Bewertungen
- RF Acceleration in RF Acceleration in Linacs LinacsDokument44 SeitenRF Acceleration in RF Acceleration in Linacs LinacsmertsekerciNoch keine Bewertungen
- Tutorial 5: XT EutDokument2 SeitenTutorial 5: XT EutNornis DalinaNoch keine Bewertungen
- Lecture 2 Microstrip Antennas (MSA)Dokument38 SeitenLecture 2 Microstrip Antennas (MSA)mohamed elkassehNoch keine Bewertungen
- Constraints-Generalized CoordinatesDokument16 SeitenConstraints-Generalized CoordinatesVineet ChauhanNoch keine Bewertungen
- Filters 2Dokument60 SeitenFilters 2Nguyễn Hoàng KhaNoch keine Bewertungen
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDokument41 SeitenLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeNoch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Signal and System Lecture 15Dokument16 SeitenSignal and System Lecture 15ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 21Dokument22 SeitenSignal and System Lecture 21ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 22Dokument20 SeitenSignal and System Lecture 22ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 20Dokument18 SeitenSignal and System Lecture 20ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 16Dokument20 SeitenSignal and System Lecture 16ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 14Dokument14 SeitenSignal and System Lecture 14ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 13Dokument16 SeitenSignal and System Lecture 13ali_rehman87Noch keine Bewertungen
- Lecture17 PDFDokument19 SeitenLecture17 PDFAriesFranandaPanjaitanNoch keine Bewertungen
- Signal and System Lecture 10Dokument20 SeitenSignal and System Lecture 10ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 2Dokument21 SeitenSignal and System Lecture 2ali_rehman87100% (1)
- Signal and System Lecture 9Dokument17 SeitenSignal and System Lecture 9ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 8Dokument17 SeitenSignal and System Lecture 8ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 6Dokument19 SeitenSignal and System Lecture 6ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 11Dokument19 SeitenSignal and System Lecture 11ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 12Dokument13 SeitenSignal and System Lecture 12ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 4Dokument20 SeitenSignal and System Lecture 4ali_rehman87Noch keine Bewertungen
- Signal and System Lecture 7Dokument18 SeitenSignal and System Lecture 7ali_rehman87Noch keine Bewertungen
- At Mega 16Dokument357 SeitenAt Mega 16maymun382Noch keine Bewertungen
- Lecture1 CT SignalsDokument9 SeitenLecture1 CT SignalsMinh NgocNoch keine Bewertungen
- Signal and System Lecture ADokument15 SeitenSignal and System Lecture Aali_rehman87Noch keine Bewertungen
- Analog Communicationlecture 16Dokument16 SeitenAnalog Communicationlecture 16ali_rehman87Noch keine Bewertungen
- Behavior of Analog Systems in The Presence of NoiseDokument18 SeitenBehavior of Analog Systems in The Presence of Noiseali_rehman87Noch keine Bewertungen
- Review of Random ProcessesDokument34 SeitenReview of Random Processesali_rehman87Noch keine Bewertungen
- Analog Communicationlecture 15Dokument13 SeitenAnalog Communicationlecture 15ali_rehman87Noch keine Bewertungen
- Bandwidth of Angle Modulated WavesDokument30 SeitenBandwidth of Angle Modulated Wavesali_rehman87Noch keine Bewertungen
- Comparison of Angle Modulated Schemes in Presence of NoiseDokument11 SeitenComparison of Angle Modulated Schemes in Presence of Noiseali_rehman87Noch keine Bewertungen
- FM Bandwidth and FM GenerationDokument39 SeitenFM Bandwidth and FM Generationali_rehman87Noch keine Bewertungen
- Analog Communicationlecture 13Dokument27 SeitenAnalog Communicationlecture 13ali_rehman87Noch keine Bewertungen
- Numerical For Practice MidtermDokument3 SeitenNumerical For Practice MidtermSiddhant SinhaNoch keine Bewertungen
- DOM Question BankDokument4 SeitenDOM Question BankGomish SharmaNoch keine Bewertungen
- 05 Free Vibrations of SDOF SystemsDokument10 Seiten05 Free Vibrations of SDOF SystemsRoni AfrianNoch keine Bewertungen
- Quantumgravityfromatomicresonance PDFDokument16 SeitenQuantumgravityfromatomicresonance PDFGherghe BogdanNoch keine Bewertungen
- EHVAC NotesDokument36 SeitenEHVAC NotesVenkatNoch keine Bewertungen
- Second Order SystemDokument11 SeitenSecond Order SystemSaravanan SukumaranNoch keine Bewertungen
- Lecture 1 Mechanical VibrationsDokument6 SeitenLecture 1 Mechanical VibrationsRogelioB.AlobIINoch keine Bewertungen
- Circuit Analysis in MatlabDokument34 SeitenCircuit Analysis in MatlabRana Usman67% (3)
- Mechanical System and Simmechanics SimulationDokument5 SeitenMechanical System and Simmechanics SimulationIcarus CanNoch keine Bewertungen
- Vibration LabDokument15 SeitenVibration LabAngarajSharmaNoch keine Bewertungen
- Abhimod EQ Module 3 Ref Notes PDFDokument21 SeitenAbhimod EQ Module 3 Ref Notes PDFathiraprNoch keine Bewertungen
- Effective - Mass - of - Tuned - Mass - Dampers - Tapoj Et Al - 2018Dokument15 SeitenEffective - Mass - of - Tuned - Mass - Dampers - Tapoj Et Al - 2018jaswantNoch keine Bewertungen
- Smib TLabDokument13 SeitenSmib TLabapi-3831923Noch keine Bewertungen
- Me420 Mechanical Vibration and Acoustics Multi-Degree of Freedom SystemsDokument47 SeitenMe420 Mechanical Vibration and Acoustics Multi-Degree of Freedom SystemsRobin SinghNoch keine Bewertungen
- Veljko Milkovic Two Stage Mechanical OscillatorDokument39 SeitenVeljko Milkovic Two Stage Mechanical OscillatorAbigaile2009Noch keine Bewertungen
- Barry Isolators Selection GuideDokument16 SeitenBarry Isolators Selection GuideJason E. CortésNoch keine Bewertungen
- High Voltage Transmission Line Vibration Using MATLAB To Implement The Finite Element Model of A Wind-Induced Power-Line Conductor Vibration PDFDokument21 SeitenHigh Voltage Transmission Line Vibration Using MATLAB To Implement The Finite Element Model of A Wind-Induced Power-Line Conductor Vibration PDFameypnNoch keine Bewertungen
- 2005 Theoretical and Experimental Study On Wave Muttray Et AlDokument26 Seiten2005 Theoretical and Experimental Study On Wave Muttray Et AlRaed Naim KhammashNoch keine Bewertungen
- Transient Analysis of AC CircuitsDokument49 SeitenTransient Analysis of AC CircuitsMohamed Taleb50% (4)
- OA Eigen Solution SSI Deep WaterDokument30 SeitenOA Eigen Solution SSI Deep WaterMrk BrkngNoch keine Bewertungen
- Chapter 2 Response To Harmonic Excitation: Introduces The Important Concept of ResonanceDokument100 SeitenChapter 2 Response To Harmonic Excitation: Introduces The Important Concept of Resonanceasif aliNoch keine Bewertungen
- Sinusoidal Oscillator: An Electronic Device That Generates Sinusoidal Oscillations of DesiredDokument22 SeitenSinusoidal Oscillator: An Electronic Device That Generates Sinusoidal Oscillations of DesiredbasimNoch keine Bewertungen
- Lab #6 - Second Order Systems Rev 1Dokument5 SeitenLab #6 - Second Order Systems Rev 1ahmed shahNoch keine Bewertungen
- Free Vibration of One Degree of Freedom Systems: Initial DeviationDokument8 SeitenFree Vibration of One Degree of Freedom Systems: Initial DeviationEugine BalomagaNoch keine Bewertungen
- Course Name: Electronic Measurement and Instrumentation Course Code: MC1307 Course Instructor-Princy RandhawaDokument191 SeitenCourse Name: Electronic Measurement and Instrumentation Course Code: MC1307 Course Instructor-Princy RandhawaDavid Solomon Raju YellampalliNoch keine Bewertungen
- Gujarat Technological UniversityDokument3 SeitenGujarat Technological UniversityBhavesh PatelNoch keine Bewertungen