Beruflich Dokumente
Kultur Dokumente
Gestion Des Terminaux A Conteneurs
Hochgeladen von
Abdelkader ChaouiOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Gestion Des Terminaux A Conteneurs
Hochgeladen von
Abdelkader ChaouiCopyright:
Verfügbare Formate
UNIVERSIT DU QUBEC MONTRAL
LA LOGISTIQUE DES TERMINAUX PORTUAIRES DE CONTENEURS
MMOIRE
PRSENT
COMME EXIGENCE PARTIELLE
DE LA MATRISE EN ADMINISTRATION DES AFF AIRES
MBA RECHERCHE OPTION MANAGEMENT ET TECHNOLOGIE
PAR
JULIEN DUBREUIL
FVRIER 2007
UNIVERSIT DU QUBEC MONTRAL
Service des bibliothques
A vertissenient
La diffusion de ce mmoire se fait dans leqrespect des droits de son auteur, qui a sign
le formulaire Autorisation de reproduire et de diffuser un travail de recherche de cycles
suprieurs (SDU-522- Rv.01-2006). Cette autorisation stipule que conformment
l'article 11 du Rglement no 8 des tudes de cycles suprieurs, [l'auteur] concde
l'Universit du Qubec Montral une licence non exclusive d'utilisation et de .
publication oe la totalit ou d'une partie importante de [son] travail de recherche pour
des fins pdagogiques et non commerciales. Plus prcisment, [l'auteur] autorise
l'Universit du Qubec Montral reproduire, diffuser, prter, distribuer ou vendre des .
copies de. [son] travail de recherche des fins non commerciales sur quelque support
que ce soit, y compris l'Internet. Cette licence et cette autorisation n'entranent pas une
renonciation de [la] part [de l'auteur] [ses] droits moraux ni [ses] droits de proprit
intellectuelle. Sauf entente contraire, [l'auteur] conserve la libert de diffuser et de
commercialiser ou non ce travail dont [il] possde un exemplaire.
11
REMERCIEMENTS
Tout d 'abord, j 'aimerais remercier sincrement mon directeur de recherche, M. Teodor
Gabriel Crainic. C'est grce ses conseils prcieux, ses critiques co nstructives et sa
passion pour l'univers du transport que ce mmoire a pu prendre forme. E nsuite, je tiens
remercier sincrement ma famille pour le soutien qu'ils m'ont apport durant mes tudes et
durant la rdaction de ce mmoire.
Je tiens exprimer ma reconnaissance au Centre de recherche sur les transpotts et la Chaire
de recherche elu CRSNG en management logistique pour les ressources qu ' ils ont mi s ma
disposition tout au long de mes tudes de matrise.
Dans le cadre de cette recherche, j'ai eu la chance de rencontrer plusieurs intervenants du
domaine du transp01t maritime. Je tiens remercier chacun de ces intervenants : Mme
Madeleine Faquin, Prsidente Logistec Corporation ; M. Roger Carr, Directeur gnra l
Tem1ont Montral ; M. Calvin Whidden Vice-prsident Ceres corporation ; M. Kevin
Doherty, Vice-prsident Terminaux Montral Gateways ; M. Meguerditch Kanondj ian,
Directeur des oprations Tenninaux Montral Gateways; M. Didier V anal , Directeur gnral
CMA-CGM Montral; M. Andrew Nation, Directeur des oprations CMA-CGM Montral ;
M. Murray Graves, Directeur de l'administration Halterm Limited.
Finalement, je tiens absolument remercier mes amis qui m'ont suppott tout au long de mes
tudes.
lll
TABLE DES MATIRES
LISTE DES FIGURES .... ........ ... .... ... ..... ..... ... .. .. .... ... ............... .. ............... .... .... .......................... vi
LISTE DES TABLEAUX ..... .. .. .. .... .. ................... .. .......... .. ......... ....... .................. ...... ............ ..... ix
RSUM ..... ... ........... .. .............................. ................. ............ .. ..... ......... ... ............ ........ ....... ...... xii
INTRODUCTION ................................................ ... ....... ... .............................. ............................. l
CHAPITRE I
TRANSPORT INTERMODAL ET TERMINAUX MARITIMES DE
CONTENEURS ................................ .... .. .. .. ............... .... ........... .. .... .. .... .... .... .... ..... .. ....... . 3
1.1 Transport intern1odal .. ....... .. ......... .. .... ... ...... .......... ...... .... ... ................... .......... ... ... .. .... .. ... .. 3
1.2 Transport maritime de conteneurs ........ ..... ............. ..... .... .. .. ................ ......... ......... ............. 7
1.3 Rle des terminaux portuaires dans le transport intermodal ............................................ 10
1.4 Organisation physique et quipements d' un terminal maritime de conteneurs .. ..... .. ....... 11
1.4.1 Zone d'oprations p01tuaires ... .. ............. ........ ..... ... ............. .. .. ..... ..... ... ... .. ....... ............ 12
1.4.2 Zone de stockage du terminal .. .. .. .................... ....... .... ............... .......... ....... ... .. ... ......... 16
1.4.3 Zone d'oprations terrestres .. ..... ..... .. ..... ....... ...... .... .. ........ .. .. .. ...... ..... .. ... .. ..... .... ...... .... 21
1.5 Flux d' infonnations et systmes de communication et de gestion des terminaux .......... . 24
1.6 Cheminement d'un conteneur l'intrieur du terminal .......... .. ........................ .. ........... .. 26
l. 7 Conclusion .. ............................................................................. ........................................ 26
CHAPITRE II
PROBLMES DE PLANIFICATION ET DE GESTION DES TERMINAUX
MARITIMES DE CONTENEURS ............................................................................... 27
2.1 La planification stratgique ..... ........... .. ..... .. ............................... .... ... ... ... .. ....................... 27
2.2 La planification tactique ...................... ..... .................... ... ............................ .................... . 36
2.3 La planification oprationnell e .......... ................ .. ..... .... .. ...... ... .. .... ......................... ..... .... 46
2.4 Planification en temps rel ......................................... ................ ...................................... 53
2.5 Systmes intelligents dans les ports ..... .............. .............................................................. 56
2.6 Conclusion .............. ....................... .. .......................................... ..... ................................. 60
lV
CHAPITRE III
PROCESSUS D ' UN TERMINAL MARITIME DE CONTENEURS .................... .... .. ............ 61
3.1 Processus de la zone d'oprations po tiuaire du terminal ................................................. 62
3.2 Processus de la zone d ' oprations terrestre du terminal ...... .......... ... .. .. .. ....... .. ... .. .. .. ...... . 66
3.3 Processus de la zone de stockage elu tem1inal.. .... .. .... .. .... .... .. ... .... .. .. ...... .. ........ ...... .... .. ... 73
3.4 Flux d'informat ions ....... ..... ..... .. ... .. ........ ....... ..... ............. ............ ..... .. ... ........ ... .. ... .... ....... 74
3.5 Conclus ion ...................................... .. ........................... ................... ........... ...................... 77
CHAPITRE IV
ANALYSE COMPARATIVE DE L 'UTILISATION DES SYSTMES DE TRANSPORT
INTELLIGENTS ENTRE LES PORTS DE LA CTE EST CANADIENNE ET LES
PORTS DU RESTE DU MONDE .. ... .... .. ....... .. ... .. ...... .. .. .. .... .. ............ ...... ... .. ... ..... .. ....... .. .. ... ... 78
4.1 Systmes de transport intelligents .................................................................................... 79
4.2 Mthodologie ........... .................... .. ... .................. .. ........... ... ... ... ... ........ .... ..... .. ...... ........... 81
4.3 Les systmes de transpmt intelligents dans les term inaux portuaires de conteneurs ....... 82
4.4 Futurs STI possi bles .... ... ... .. ........ ....... .. ... ..... ......... ....... ... ...... ...... ..... .......... .. ...... .. .... ........ 92
4.5 Mise en contexte des ports de la cte Est canadienne .. .. .... .. ....... .. ........ .. ............ .. .......... . 94
4.6 Les systmes de transport inte ll igents dans les potts de la cte Est canadienne .. .. ...... .. .. 98
4.7 Oppottunits pour les ports de la cte Est canadienne ............... ... .. .... .... ............... .. .. .... 103
4.8 Co nclusion ............... .. .... .. .............................................. ... .... .. ............ .. ............... .. ........ l 07
CHAPITRE V
DESIGN D 'UN SIMULATEUR DES OPRATIONS D 'UN TERMINAL MARITIME DE
CONTENEURS ......................... ...................................... ........................................................ 108
5.1 Simulation de term inaux portuaires de conteneurs et mthodologie gnrale .. ... .. .... .. .. 108
5.2 Design gnral du simulateur .................................. ...................................................... . 111
5.3 Niveaux de la simulation ......................................... ...... ................................................. 1 J 3
5.4 Modles et sous-modles du design d'un simulateur de terminal maritime de
conteneurs .................. ..... ..................................... .. ....... ... .. .... ...................... .. ................... ... 113
5.5 Conclu sion ........ .. .... .... ... .... .. ... ..... .. ...... ..... .. ....... .... ..... ..... ....... .. ...... .................... .... ... ... . 128
CHAPITRE VI
IMPLANTATION D 'UNE SIMULATION D'UN TERMINAL MARITIME DE
CONTENEURS .. ............... ..... ... ... ..... ......... ....... ... ........ ... ......... .... ..... ..... .. ....... ..................... ... 129
6.1 Objectifs de la simulation .. ...... .. ........ .. ... .. ............................................................ ..... .... 129
6.2 Logiciel utilis .... .. ......................................... ..... .. ......................................................... 130
6.3 tude de cas pour l' implantation ............. .. ................................................................. ... 132
6.4 Implantation ............ ............. .. ........... ...... .. ... .. .. .. ......... .. ... ................ ...... .. ............. .. ....... 134
6.5 Conclu sion .. ........... ..... .... ............ ...... .... ............ .. ................ .. .... .. ................................... 182
CHAPITRE VII
V ALIDA TION ........................ ................................. .... ........ ..... ....... ...... ..... ... ... ...... ................ . l 84
7.1 Analyse des donnes ............ .. .... .. ..................................... ...... .. .... .......... .............. .. ....... 184
7.2 Calibration et validation ... .. ........................ .. ....................................... .... ...... .. ..... .... .. .. .. 198
7.3 Conclusion ........ ... ........................... ..... ....................... .. ...... ......... .... ......... ...... .. .. ........... 214
CHAPITRE VIII
EXPRIMENTATIONS ....... ...... ...... ... .. .................. .. ............ .. .......... ... ... ...... ............ ... ...... ..... 2 16
8.1 Cadre de rfrence ......... ............................ .... ........ .................... ...... ....... ....... .... .... ........ 216
8.2 Premi er test: Arr ives simultanes de navires ...... ...... .. ...................... .. ........................ 217
8.3 Deuxime test : Panne majeure d' un e grue de quai ... .. .......... ...... .. .............. .. .............. .. 224
8.4 Troisime test: Ajout d'une grue de quai ..... .. ... ........ ........... .......... .. ...... ..... .. ......... ....... 235
8.5 Conclu sion .. .. ........... ....... ... .. .... ...................... ... .......... ... ......... .... .... .......... ..... .......... ... ... 245
CONCLUSION ............... ...... ..... ..................... ... ........... ... ... ......................... ............ ............... . 24 7
BIBLIOGRAPHIE .. ............................. ... .. .. ....... ................ ... .......... ... ........ ......... .......... ... .. ...... 25 1
RFRENCES WEBS .. ..... ...... ........ ... .... .. .... .. .... ... ... ... .......... ... ..... .. ... ...... .................... ... ... .. ... 257
Vl
LISTE DES FIGURES
Figure 1.1 Disposition d'un terminal maritime spcialis dans la manutention de conteneurs.12
Figure 1.2 Grue de quai au Port de Rotterdam ......................................................................... 13
Figures 1.3 a, b. Vhicule guid automatiquement et systme remorques multiples ............ 14
Figure 1.4 Systme de convoyeur moteur linaire ............................................ .. ........ .. .... .. .. . 15
Figure 1.5 Chariot cavai ier .... .. .... ........................................................................ .. .. ... .............. 16
Figure 1.6 a, b. Pont roulant sur pneumatiques et pont roulant sur rails .................................. 18
Figure 1.7 Chariot prise par le haut et chariot prise par le haut avec mat tlescopique ....... 18
Figure 1.8 Pile de conteneurs .. ...... ................ .. .......................... .................. ................ .............. 20
Figure 1.9 Systme d'entreposage et cl 'extraction automati que ............ ................ .................... 21
Figure 1.10 Gurite d'un terminal de conteneurs ................. .. ................ .......... ................ .. ....... 22
Figure 3.1 Signification des symboles utiliss dans les diagrammes cie processus .......... .. ....... 62
Figure 3.2 Processus de dchargement des conteneurs ............... .............................. .... ........... . 64
Figure 3.3 Processus de chargement des conteneurs ...................................................... .... ....... 65
Figure 3.4 Processus d ' identification des camionneurs et de traitement des oprations de
transport routier ........................................................................................... ..... ... .... ... ... .... ...... ... 68
Figure 3.5 Processus de rception des conteneurs par camion .................................................. 69
Figure 3.6 Processus de livraison des conteneurs par camions ................................................. 70
Figure 3.7 Processus de rception des conteneurs par train .... .................................................. 7 J
Figure 3.8 Processus de livraison par train .............................................................. .......... ........ 73
Figure 3.9 Processus de remaniement des conteneurs ......................... .. ...... .. .......................... .. 74
Figure 4.1 Modle de traitement des donnes d'un systme de transport intelligent ............ .... 79
Figure 5.1 Modle de dveloppement d'un logiciel ................................................................ llO
Figure 5.2 Reprsentation d'un terminal maritime de conteneurs comme une su ite cie files
d' attente ......................... ....... ......................................... .... .... ...... .... ... .... ......... ......................... 112
Figure 5.3 AtTive des navires .................... ............................... ... ............................ ...... .... ..... 114
Figure 5.4 Processus d'allocation des grues de quai ............................................................... 115
Figure 5.5 Processus d'allocation des serveurs pour le dchargement des navires ................. 11 7
Figure 5.6 Processus de dchargement des navires .. ........................... ................ .................... 118
Yll
Figure 5.7 Processus d 'all ocati on des serveurs pour le chargement des navires ... .... ....... ... .... 119
Figure 5.8 Processus de chargement des navires ... ........... ... ...... .... ....... .... ..... ...... ...... ..... ... .. .. .. 12 0
Figure 5.9 Processus de dchargement des trains .............. .. ........ .. ................ .. ...................... . 12 1
Figure 5.10 Processus de chargement des trains .. .. .... .... .. .......... .. .. .. .......... .. .. .. ...... .. .. .. .. .. .... ... 123
Figure 5.11 Processus d 'all ocation des serveurs aux trains .... .... .. .. .... .. .. .. .... ........ .......... .. ....... 124
Figure 5.12 Processus de dchargement de camions .. ... .. .. ...... .. .. .... .. .... .. ........ ..... ... .. .... .. .. .. .... 125
Figure 5.13 Process us de ch argement des cami ons .... .... ... ............ .. .. .. .. .......... ........ .. .. ... .. .. .. ... 126
Figure 5.14 Process us de ra ll ocation des serveurs aux navires ..... .... .. .................... .. ............ 127
Figu re 5.15 Processus de rallocations des serveurs aux trains ...... ..... .. .... .. .............. .. ............ 128
Figure 6.1 Modules de base du logic ie l de simulatio n ARENA ................................. .. .. .. .. ... .. . 13 1
Figure 6.2 Modle gnral de la simul at ion ......... .. .......... .. .... .... .... ... ........ ......................... .. ... 135
Figure 6.3 Sous-modles de gnration des arrives de navire ..... .. .. .. .. .. .. .. .. .. .. ... .... .. .. .... .. .... . 138
Figure 6.4 So us-mod le d'allocation des quais . .. ...... ... .... ......... ..... ......... .. .. ....... ..... ..... .... ....... 140
Figure 6.5 A llocation des grues de qu ai . .. ... .. .......... .... .. .. ............................ ... .......... .. ..... .. ...... 14 1
Figure 6.6 Premire tape du processus de rallocation des grues de quai ... .... .. .. .................. 143
Figure 6. 7 Sous-mod le Rallocation des grues de quai 1 ............... .. ... .. ..................... .. ... 145
Figure 6.8 Modle gnral d'all ocation des serveurs ........ ..... ........ .. ...... .. ........................ ... .... 14 7
Figure 6.9 Sous-modle A llocation des serveurs 2 ....... .. .................... .. .............................. 149
Figure 6.10 In itialisation de l'all ocation des serveurs .... .. .. .. .... ...... ........ ... .................... .. ........ 151
Figure 6.11 Sous-modle des grues de qua i....... .. ........ .. .... .... .............. .. .................. .. .. .. ......... 153
Figure 6.12 Dchargement des navires ...... ...... ................ .. .................. .. ...... .. ........ .. .......... .. .. . 154
Figure 6.13 Chargement des navires ............................................................ .. ................... .. .... 157
Figure 6.14 So us-mod le des oprations des serveurs ......... .. ................................................. 161
Figure 6.1 5 Libration du quai et des grues de quai ................................................................ 163
Figure 6. 16 Dpa1t des navires ....... .... ...... .. .. ..... .. .. ... ... .. .... .... ........ .... .. .... .... .. ..... ... ..... ... ..... ... .. 164
Figu re 6.1 7 A n ive des trains ................................................. .. ....................... ... ... ..... ....... .. ... 166
Figure 6.1 8 A llocation d'une vo ie ferre aux trains ........... ... .... .... .. .... .. ................ .. .... .. .. .... .... 167
Figure 6.19 Dchargement des trains ...................................................................................... 169
Figure 6.20 Chargement des trains .......................................................................................... 170
Figure 6.21 Libration de la voie ferre .......... .. ..................... .. ......................................... .. .... 171
Figure 6.22 Dpmt des trains ............ ......................... .. ........ ..... .. ..................... .... ... .. .. .. .. ......... 172
- --
~-~--
--~
Vlll
Figure 6.23 Horaire des camions .... .. ................... ... .... ....... ...... ... ....... ............... .... .... .............. . 174
Figure 6.24 Anive des camions ............................................................................................. 176
Figure 6.25 Dchargement des camions ...... ............. .... .. .. ....... ...... .. .......... ..... ........ ........ ......... 178
Figure 6.26 Chargement des camions ......... .... .. ...... ....... ... .... .. ................................................ 180
Figure 6.27 Dpart des camions ........... .............. ..... ...... .......... ............ .... .... .. ..... .. ............. ...... 181
Figure 6.28 Inventaire de la zone de stockage du terminal. .................................................... 182
Figure 7.1 Sous-modle d'rurive des navires ajust pour tester le simulateur avec les
do1111es relles ......... ..... .............. ............................................................................................. 199
Figure 7.2 Productivit relle et simul des oprations de dchargement et de chargement des
navires .. ......................... .......... ... .......... .......... ... .. .... ..................... ... ..... ... ... ..... ...... ........ ........... 204
Figure 8.1 volution de l' inventaire moyen de la zone de stockage du terminal.................... 222
Figure 8.2 Ajustement au sous-modle d'oprations des navires ...................................... .. .... 225
Figute 8.3 Sous-modle d'opration des grues de quai lorsqu'une grue est en panne ............ 226
Figure 8.4 Sous-mod le de gnration des pannes de grues de quai ........................... ............ 227
Figure 8.5 Temps quai des navires de la ligne] .............. ...... .. .. ........................................... 230
Figure 8.6 Temps quai des navires de la ligne 2 .......................................... ......................... 231
Figure 8.7 volution de l' inventaire moyen de la zone de stockage du tenninal. .. .. .. .. .. .... ..... 233
Figure 8.8 Sous-modle d'opration des grues de quai. .......................................................... 235
Figure 8.9 Temps quai des navires de la ligne !.. ... ...... ........................................................ 239
Figure 8.10 Temps quai des nav ires de la ligne 2 ............ .............. ........ .... ........... ................ 240
Figure 8.11 vo lution de l'inventaire moyen de la zone de stockage du tenninal... ............... 243
lX
LISTE DES TABLEAUX
Tableau 7.1 Enems carres moyetmes des distributions pom le temps entre les arrives de
navire de la ligne 1. ...... .... ........ .. ................. ............. ........ ... .. ............. ................... ................ .... 18 7
Tableau 7.2 Erreurs carres moyennes des distributions pour le temps entre les arrives de
navire de la li gne2 .... ........ ... ............... ............................. ................... ...................................... 187
Tableau 7.3 Fonctions des distributions alatoires des grues de quai. .................................... 187
Tableau 7.4 Erreurs carres moyennes des distributions pour le temps de traitement de la
grue 1..... .. ....................... ..................................................................................... ... .. ................ 188
Tableau 7.5 Erreurs carres moyennes des distributions pour le temps de traitement de la
grue 2 ....................... .. .... ...................... ... ...... .. ..... .... ............. .. ... ............. ...... .. ......... .... .... .. .... ... 188
Tableau 7.6 Eneurs carres moyennes des distributions pour .................. .. ... ... ......... ... .......... 188
le temps de traitement de la grue 3 ................. .. .................................................................. .. .. .. 188
Tableau 7.7 Fonctions des distributions alatoires pour les plans de chargement des navires.l89
Tableau 7.8 Erreurs carres des distributions pour le nombre de conteneurs dcharger des
navires de la ligne 1...... .. ..... .. .... ... ....... .. .......... .................................. ..... .... .... .... .. .. ........... ... .... 190
Tableau 7.10 Erreurs canes des distributions pour le nombre de conteneurs charger sur les
navires de la ligne 1......... ........... .. ................................. ... ......... ... ........... .......... ....................... 190
Tableau 7.9 Eneurs carres des distributions pour le nombre de conteneurs dcharger des
navires de la ligne 2 ............ ... ....... .. ... .................... ... .. .. .... ........ ......... ..... .................................. 190
Tableau 7.11 Erreurs carres des distributions pour le nombre de conteneurs charger sur les
navires de la ligne 2 .............. ........ ......... ....................... .... .... ........ ..... .... ... ....... .... ...... .. .. ... ... .. ... 190
Tableau 7.12 Minimum, mode et maximum pour une distribution alatoire triangulaire des
temps de travail des serveurs lors du dchargement des navires .. ....... ........ .... .. .. .. ....... ... .. ....... 191
Tableau 7.13 Minimum, mode et maximum pour une distribution alatoire triangulaire des
temps de travail des serveurs lors du chargement des navires .................... ............. .............. .. 192
Tableau 7.14 Comparaison des donnes relles et des rsultats de la simulation pour le temps
de travail des grues de quai et la productivit des oprations de chargement et de
dchargement des navires ... ...... ..... ................................... ......... ............... ................................ 203
Tableau 7.15 Temps de traitement et plan de chargement moyens des trains pour le premier
scnario .......... ... ......... ..... .... ................ ....... ... ........ .... ........... ..... ... .... ......... ........ ...... ............. ... .. 206
Tableau 7.16 Inventaire moyen des dix rondes de simulation du premier scnario ..... .... ..... .. 208
Tableau 7.17 Taux d' utili sation des quipements du terminal... .... ... ..... .... ..... .. ........... ....... .... 209
Tableau 7.18 Moyenne, variance et cart-type des statistiques des nav ires de la premire
ligne pour la simulation d 'une anne complte d'oprations .................... ....... .... .. ... ........ .. ..... 2 11
Tableau 7.19 Moyenne, variance et cart-type des statistiques des nav ires de la deux ime
ligne pour la simulation d ' une a1111e complte d'oprations ................. ...... ...... .... .... .. ............ 211
Tableau 7.20 Temps de traitement et plan de chargement moyens des trains pour la
simulation d' une anne complte d' opration ...... ..... .... ..... ... ..... ......... ... ...... ...... ....... ............... 2 13
Tableau 7.21 Inventaire moyen des dix rondes de simulation d' une an ne comp lte
d'oprations du terminal. .. ..... ..... ... .......... ... .. ................ ........................ .......... .... .. ... .... .... ......... 2 13
Tableau 7.22 Taux d'utilisation des quipements du terminal. ........ .... ......... ... ....................... 214
Tableau 8.1 Comparaison entre les donnes rell es, les donn es obtenues de la simu lation
des oprations du terminal et les donnes obtenues de la simulation des oprat ions du
terminal avec des retards de navires qui causent des arrives simultanes .............................. 219
Tableau 8.2 Temps de traitement et plan de chargement moyens des trains pour dix rondes
simulation avec arrives simu ltanes de navires . ... .. .. ....... ... ... .. ..... .. ......... .. .. .... ... ... ... .... ........ .. 221
Tableau 8.3 Inventaire moyen de la zone de stockage du terminal. ...... ... ....... ...... .... .. ... .. ...... . 221
Tableau 8.4 Taux d' utili sation des quipements du terminal. ........ ..... ...... .. ......... .... ...... ......... 223
Tableau 8.5 Comparaison entre les donnes re lles, les donnes obtenues de la simulation
des oprations elu tenninal et les donn es obtenues de la simulation des oprations du
tenninal avec une panne majeure d' un e grue de quai ......................................... ...... ............... 229
Tableau 8.6 Temps de traitement et plan de chargement moyens des trains pour dix rondes
simulation avec panne d'une grue de quai ..... ......... ........... .. ... ... .... ..... ... ...... .......... ....... ... ... ... .. 232
Tableau 8.7 Inventaire moyen de la zone de stockage du terminal. ... ..... .... .. ............. .. ........... 232
Tableau 8.8 Taux cl 'utilisation des q uipements du terminal. .. ... ............................................ 234
Tableau 8.9 Comparaison entre les donnes relles, les donnes obtenues de la simulation
des oprations du tenninal et les donnes obtenues de la simulation des oprations du
terminal avec l'ajout d'une grue de quai supplmentaire .... ..... ........... .. ...... ......... ... .......... ... .... 237
Xl
Tableau 8.10 Temps de traitement et plan de chargement moyens des trains pour elix rondes
simulation avec une grue de quai supplmentaire .. ...... ... ..... .... ............ .. .... .... :...... ..... ......... .. .. . 241
Tableau 8.11 Inventaire moyen de la zone de stockage elu terminal. ................. .......... ........... 242
Tableau 8.12 Taux d'utilisation des quipements du tenninal... ........................ .. .. .. .. .. ........ .. . 244
Xll
RSUM
Perus pendant longtemps comme faisant parti d'un secteur d'activit conomique archaque,
les terminaux po1tuaires de conteneurs constituent un maillon important et mconnue de
plusieurs chanes de transport intermodal. La croissance rapide des volumes de conteneurs
manutentionns dans ces terminaux a pour consquence d'entraner une congestion de ceuxci et, par le fait mme, une perturbation des rseaux d'approvi sionnements de plusieurs
entreprises.
En consquence, l'objectif de ce mmoire peut tre divis en deux temps. Dans un premier
temps, la premire pa1tie de ce mmoire vise comprendre le fonctionnement et les
problmatiques lies la gestion des terminaux p01tuaires de conteneurs. Pour ce faire , une
revue de la littratme lie la planification et la gestion des terminaux portuaires de
conteneurs est effectue, ainsi qu'une tude des process us de ces terminaux.
Dans un second temps, ce mmoire vise proposer des pistes de solutions afin de fac iliter la
transition des conteneurs dans ces terminaux. La principale piste de soluti on identifie est
l'application des systmes de transport intelligents aux tem1inaux portuaires de conteneurs.
Dans ce sens, une tude comparative de 1'utilisation des systmes de transport intelligents
entre les ports de la cte est canadiem1e et les ports du reste du monde est prsente. Ensuite,
une premire version d un simulateur des oprations d un terminal portuaire de conteneurs
est dve loppe, afin d'tre utilise comme outil d'analyse pour mesurer l' impact d'une
introduction plus importante des systmes de transport intelligents dans les terminaux
portuaires de conteneurs.
Mots clefs : Tenninaux portuaires de conteneurs, systmes de transport intelligents,
simulation, transport intermodal, transport de marchandises.
INTRODUCTION
La conteneurisation des marchandises a jou un rle important dans le dveloppement des
rseaux intemationaux de transpo1i intennodal. En effet, avec l' arrive du conteneur, un
imp01iant rseau international de transport bas sw l' utilisation d' un format standard de
cargarson s'est dvelopp. Cette standardisation a permis d'acclrer le transfert de la
marchandise d ' un mode de transpoti l'a utre. Aujourd ' hui encore, les oprations de transfert
d'un mode de transport l'autre demeurent l' lment cl d ' un systme de transport
performant.
Parmi ces points de transferi, les terminaux po1iuaires de conteneurs sont gnralement
identifis comme le maillon faible de la chane. Tel qu ' il a t dj t dmontr plusieurs
reprises, une chane de transpo1i intermodale ne peut tre plus forte que le plus faible de ses
maillons. C'est pourquoi ce mmoire s'intresse la logistique des terminaux portuaires de
conteneurs. Plus prcisment, ce mmoire vise comprendre le fonctionnement de ces
tem1inaux et identifier des pistes de solution pour surmonter le gou lot cl 'tranglement qui se
produit ce niveau de la chane.
Pour ce faire, le chapitre I situe les terminaux po1iuaires de conteneurs et leur rle clans les
rsea ux de transport intermodaux. De plus, le rle ainsi que l'orga nisation gnrale de ces
terminaux sont prsents.
Le chapitre II prsente les diffrentes problmatiques lies la planification et la gestion
des terminaux p01iuaires de conteneurs . Les diffrentes problmatiques sont dcrites et une
revue de la littrature pertinente sur ces problmatiques est prsente.
Dans le but d'approfondir la comprhension du fonctionnement de ces terminaux, le chapitre
III prsente une cariographie des diffrents processus d' un terminal maritime de conteneurs,
ainsi qu' une description des principaux flux d'informations en amont et en aval des
terminaux.
Le chapitre IV prsente un e analyse comparative de 1'utilisation des systmes de transpott
intelligents entre les ports de la cte Est canadienne et les potts du reste du monde. Dans un
premier temps, ce chapitre dfini ce que sont les systmes de transport intelligents et explique
en quoi ceux-ci peuvent tre utile aux tenninaux portuaires de conteneurs. Dans un second
temps, les diffrentes applications des systmes de transpott intelligents aux terminaux
p01tuaires de conteneurs sont prsentes et l'utilisation de ceux-ci par les terminaux de la
cte Est canadienne est analyse.
En se basant sur le constat que les systmes de transport intelligents constituent une piste de
solution 1'amlioration des oprations de transbordement de conteneurs dans les terminaux
portuaires, le chapitre V prsente le design d'une premire vers ion d'un outi l d'analyse pour
mesurer l'impact que pourrait avoir une plus grande utilisation des systmes de transport
intelligents. L'outil d ' analyse en question est une simulation des oprations d'un terminal
maritime de conteneurs.
Le chapitre VI procde une implantation de la simulation 1'aide de la version 8.1 du
logiciel de simulation ARENA. Cette implantation se base sur le design dvelopp au chapitre
prcdent.
Cette implantation est ensuite valid au chapitre su ivant en se basant sur des donnes
obtenues d'un tenninal maritime de conteneurs de la cte Est canadienne. pattir de cette
validation, certaines limites de l'out il sont releves et des pistes de so lutions pour contourner
ces limites sont prsentes.
Ensuite, le chapitre VIII prsente des exprimentations effectues sur le simulateur afin de
dmontrer le type d'analyse qui peuvent tre faites partir de celui-ci. Les rsultats de ces
tests sont analyss .
Finalement, la conclusion effectue un rappel des principales conclusions de chacun des
chapitres et prsente des avenues de recherche futures.
CHAPITRE I
TRANSPORT INTERMODAL ET TERMINAUX MARITIMES DE CONTENEURS
Ce chapitre vise situer le transport maritime et les terminaux maritimes de conteneurs
l'intrieur des chanes de transport intermodal internationales. Le chapitre est organis de la
faon suivante : La section 1.1 dfinit le transport intermodal. La section 1.2 prsente
brivement le rle et 1'organisation du transport maritime au sei n des rseaux de transport
internationaux . Ensuite, le rle des terminaux maritimes de conteneurs est prsent dans la
section 1.3. La section 1.4 prsente 1' organisation physique des terminaux et les quipements
utiliss au sein de ceux-ci, tandis que la section 1.5 prsente les systmes de co mmunication
et de gestion des terminaux. Le cheminement d' un conteneur l' intrieur du terminal est
prsent la section 1.6.
1.1 Transport intermodal
Le transport intermodal est aujourd'hui un lment fondamental des systmes de transport
modernes. Largement dfini, il consiste au trru1sport d' une personne ou d' un chargement d' un
point d'origine un e destination par une squence d'au moins deux modes de transpo11, le
transbordement d' un mode 1'autre tant effectu dans un term inal intermodal. Afin de
rduire l'tendue de la prsente tude, le transport d'individu sera exclu pour se concentrer
sur le transport de marchandises. Donc, en reprenant la dfinition pralablement prsente, on
obtient: le transport de marchandise d' une origine une destination via au moins deux
modes de trru1sport, incluant un trru1sfert dru1s un terminal intennodal.
Cette dfinition reste gnrale et inclut plusieurs types de produits trru1sports et plusieurs
chanes de transport. Par exemple, le transport rgional et international de co li s postaux, le
transpmt de matires premires sur de grandes distances, etc. Par contre, l' heure actue lle, la
part la plus importante du transpmt intermodal international revient aux conteneurs (Gnther
et Kim 2005). C'est pourquoi la dfinition retenue du trru1sport intennodal est celle adopt
par Crainic et Kim (2005), soit: une chane multimodale de services de transport de
conteneurs. Cette chane liant 1'expditeur au destinataire dans un service porte porte se
droulant sur de grandes distances.
La dfinition prcdente a permis de relever l'imp01tance elu conteneur dans le transpo1t
intem1odal. En effet, la standardi sation des manutentions qu ' a entran le conteneur est une
des principales raisons du dveloppement du transpo1t intennodal. Par contre, il existe
plusieurs cheminements pour un conteneur dans une opration de transport intermoclal. Dans
le cas prsent, 1'tude se limitera aux transp01ts internationaux qui impliquent une portion de
transport maritime. Le cheminement d ' un conteneur au sein de ces rseaux est dtai !l clans la
sous-section su ivante.
1.1.1 Cheminement d'un conteneur travers le tseau de ttansport intermodal
Tout d' abord, peu imp01te le cheminement futur du conteneur, la premire tape cons iste
invariablement la cueillette du conteneur vide dans un dpt pour le livrer au c li ent. Cette
premire tape est gnralement constitue d' un transpo1t routier du dpt au client, mais
peut aussi inclure un transp01i ferroviaire ou un transpo1t par barge si le client est situ loin
du dpt.
Une fois le conteneur rempli, il est cueilli chez le client pour tre achemin au terminal
maritime. Ce transport peut se faire uniquement par camion ou par une combinaison de
modes de transp01t. Dans le second cas, l' organisation des oprations implique la cueillette
du conteneur chez le client, suivi d' un transpo1t par camion jusqu ' au terminal intermodal.
ce terminal, le conteneur sera entrepos en attente d'tre charg sur un train ou une barge
selon le cas. L'tape suivante consiste au transport jusqu'au terminal portuaire o le
conteneur sera dcharg et entrepos jusqu' ce que les oprations de chargement du navire
ocanique dbutent.
Comme il sera prsent subsquemment, le transpmt maritime du conteneur peut se faire par
un lien direct entre deux ports ou via un rseau de liaisons portuaires. Une fois le transport
maritime complt, le conteneur doit tre achemin au client final. Tout comme le transport
-------
----
depuis le client jusqu 'au terminal po1tuaire, la livraison du conteneur peut se faire par
transport routier ou par une combinaison de modes.
1.1.2 Les acteurs du rseau de transport intermodal
Tel qu ' il a pu tre constat clans l'illustration prcdente du cheminement d'un conteneur, le
transpmt de celui-ci via un rseau intermodal international implique de nombreuses entits.
En effet, les diffrents intervenants sont gnralement des entreprises indpendantes, bien
que les transpmieurs maritimes tendent intgrer divers maillons de la chane au cours des
demires annes.
Le
premier
intervenant est
l'expditeur.
Celui-ci
est
un
membre
d' une
chane
d'approvisionnement qui dsire expdier au maillon suivant de la chane la marchandise qui
se retrouve l' intrieur du conteneur. Le second intervenant, bien qu'il ne so it pas
immdiatement impliqu clans un mouvement physique de marchandise, est la ligne de
transport maritime intemational. En effet, c'est celle-ci qui est contacte par l' expditeur au
dclenchement elu processus de transport. Au cours des dernires annes, le rle des
transporteurs maritimes s'est modifi au sein des chanes de transport internationales.
D'entreprises se concentrant exclusivement sur le transport maritime de conteneurs, plusieurs
d'entre-elles se sont transformes en entreprises de services logistiques par la cration de
filiales ddies cette act ivit. C'est pourquoi ce so nt gnralement celles-ci qui coordonnent
les flux de conteneurs de l'expditeur au destinataire.
Les mouvements de conteneurs impliquent plusieurs autres intervenants . Tout d'abord , le
dpt peut constituer une tierce partie indpendante des transporteurs routiers, ferroviaires et
maritimes. Par exemple, le terminal portuaire peut avoir une section de son term inal ddi
l'entreposage de conteneurs vides. Par contre, dans la majorit des cas, le dpt sera opr
par un des transporteurs impliqus.
Le premier de ceux-ci est le transporteur routier qui assure le transpmi du conteneur entre les
divers terminaux et l' expditeur et au destinataire. Les faibles barrires l' entre dans cette
industrie ont pour effet de diversifier les joueurs qui y voluent. En effet, avec Je
dveloppement de 1' offre de serv1ce de transport intennodal, certaines entreprises de
transport ferroviaire en sont venues raliser elles-mmes les oprations de transp01t routier
entre les clients et les terminaux ferroviaires. De plus, les lignes maritimes ont-el les aussi
dveloppes des services de transport routier. L'intgration par les lignes maritimes des
autres activits de la chane de transpo1t intermoclal a d'ailleurs men des offres de serv ices
intgrs o l'ensemble des activits taient ralises par la mme entreprise (Au Canada,
c'tait notamment le cas elu Canadien Pacifique, avant la scission de l' entreprise en c inq
entits indpendantes). Par contre, i 1 existe aussi des entreprises de transport routi er
indpendantes. Encore une fois, les faibles barrires l'entre de l' industrie ont pour effet de
diversifier les types d'entreprises qui y existent. Effectivement, il existe des transporteurs de
grande taille qui possdent une flotte imposante, mais il existe aussi des transporteurs
indpendants qui possdent une flotte de quelques camions seulement.
Les transporteurs ferroviaires peuvent aussi tre impliqus dans l' acheminement du
conteneur de l'expditeur au destinataire. En Amrique du Nord, les transporteurs
ferroviaires sont gnralement ind pendants des diffrents intervena nts de la chane. Par
contre, la situation est grandement diffrente en Europe, o des services de navettes (shuttle) ,
entre les po1ts et diffrentes destinations au cur elu continent, sont mis en place par des
cons01tiums de transporteurs maritimes et parfois mme par l'administration portuaire (c'est
notamment le cas de la li aison Betuwe qui lie le port de Rotterdam l'A llemagne (Arjen Van
Klink et Van Den Berg 1998)).
Au lieu d ' un transp01t par train, une barge peut tre utilise pour le transport du conteneur.
Cette forme de transport est trs peu utilise en Amrique du Nord, mais elle est beaucoup
plus utilise en Europe. Ces entreprises sont gnralement ind pendantes des autres de la
chane.
Un autre intervenant important de la chane de transport intermodal est le terminal portuaire.
C ' est ce terminal que sont consolids les conteneurs qui ncessitent un transpo1t maritime
en eaux profondes. On retrouve chez les oprateurs de terminaux portuaires des acteurs
indpendants, tout comme on en retrouve d' autres qUI sont la proprit de transpmteurs
maritimes.
Le destinataire est l' entreprise qui reoit le conteneur de marchandises en provenance de
l'expditeur. Plusieurs autres tierces pmties peuvent intervenir dans la chane de transpott,
mais celles-ci ne sont pas impliques physiquement dans les mouvements du conteneur,
comme les douanes et autres organismes gouvernementaux.
Maintenant que les diffrents intervenants de la chane de transport intermodal sont connus,
la prochaine section prsente plus particulirement l'organisation du transpott maritime dans
les changes internationaux.
1.2 Transport maritime de conteneurs
Le transport maritime occupe une place importante dans les mouvements internationaux de
conteneurs . En effet, plus de 60% du cargo gnral transport par navire est aujourd'hui
conteneuris, certaines routes entre les pays industrialiss atteignant un taux de 100%
(Steenken et coL 2004) . De plus, cette conteneurisation s'est effectue rapidement, le premier
service rgulier remontant seulement 1961 (Steenken et col. 2004). De nos jours, le trafic
international de conteneurs est estim environ 300 millions de conteneurs EVP (qu ivalent
Vingt Pieds) (Crainic et Kim 2005) . L' EVP est la mesure utilise clans le domaine elu
transport intermodal de conteneur. Un EVP quivaut l'espace occup par un conteneur de
nonne ISO, qui a une lmgeur de huit pieds, une hauteur de huit pieds et une demi et une
longueur de vingt pieds. Selon cette unit de mesure, un conteneur de quarante pieds de long
correspond donc deux EVP.
L'industrie du transport maritime de conteneurs a subi d'importantes transformations au
cours des dernires annes. Tout d'abord, le march a t marqu par de nombreuses fusions
et acquisitions. D'ailleurs, ce processus de consolidation du march ne semble pas encore
tennin puisque deux impmtantes transactions ont eu lieu au cours de 1' anne 2005, soit
l'acquisition de l'entreprise anglaise P&O Nedlloyd par la danoise Maersk et l' achat de la
compagnie canadienne CP Ships par le conglomrat allemand TUI propritaire du
transporteur Hapag Lloyd. Afin de survivre, la majorit des plus petits transporteurs s'est
intgre l' intrieur d ' alliances avec d 'autres t:ranspotieurs dans le but d' offrir un e
couverture mondiale des routes de transport.
Ensuite, les principales routes de transports intercont inentaux ont aussi subi es d ' importantes
modifications. Traditionnell ement, ces routes reli ent l' Amriqu e du Nord, l'Europe et l' As ie .
Plus prcisment, on retrouvait trois principaux services de transport. Le premi er servi ce li ait
les ports de l'Europe de l' Ouest et du Nord aux ports de la cte Est de l'Amriqu e. Le second
service liait les pays asiatiques, principalement le Japon et Ho ng Kong, aux ports de la cte
Est de l'Amrique via le canal de Panama. Finalement, le troisime service lia it les ports de
l' Europe de l'Ouest et elu Nord aux ports asiatiques par la traverse des ocans Atl antique et
Pacifique qui ncessitait un transfert par le canal de Panama . Ce dernier tait donc d ' une
importance cruciale dans les routes maritimes intern ationales .
Par contre, les ro utes asiatiques ont subi une transformation majeure. En effet, la
consolid ati on du march et la recherche d' conom ies d'chell e ont men la co nstructi on de
navires de tailles de plus en p lus importantes. Les capac its de ce ux-ci atteignent ma intenant
de 8 000 10 000 EVP, comparativement aux premi ers porte-conteneurs qui pouvaient
accommoder plus ou moins 1 000 EVP. Par contre, la ta ille et le tirant d ' eau de ce ux-c i
restreignent leurs dplacements. En effet, plusieurs pmts ne peuvent pas accom moder de te ls
navires et leur taille imposante ne leur permettent pas d' util iser le canal de Panama ou le
canal de Suez. En consquence, les routes asiatiques ont d tre modi fies pour accommoder
ces navires, ce qui a men la crati on d ' un pont terrestre entre les ports des ctes O uest et
Est de l' Am rique. A insi, les navires en provenance d ' Asie s'an tent un po tt de la cte
Ouest amricaine, ils sont dchargs elu navire et charg sur un train destination d' un port
de la cte Est, pour tre, ensuite, transbord sur un nav ire destination de l' Europe. En ce qui
a trait au service de l' As ie vers la cte Est amricain e, des mini-ponts ont t mis en place et
lient celle-ci avec les ports de la cte Ouest par transport ferroviaire.
La conso lidati on des transpotteurs et la construction de plus gros navires ont eu pour
consquence une rorganisation des rseaux de transpmt maritime sous une forme lmb and
spoke . Dans ce type de rseau, les navires de plus grande taille oprent sur des lignes
transocaniques rgulires entre un nombre limit de pmts. pattir de ces ports, les
conteneurs sont transfrs sur de plus petits navires et distribus vers les ports ne pouvant
recevoir les navires plus imposants.
Le dveloppement de ces rseaux a eu d'impmtants impacts sur le transport international. En
effet, les ports qui ont t choisi comme points de transfeti (hub) par les grandes lignes
maritimes ont d faire face des augmentations considrables et rapides du volume de
conteneurs manutentionns . De plus, la recherche d' conomies d ' chel les a men une forte
concentration du trafic international. C' est notamment le cas de Cte Ouest amricaine o
trois groupes de ports (Los Angeles et Long Beach, Oakland, Seattle et Tacoma) reoivent
95% du trafic international (S lack 2001 ).
Cette concentration a pour effet de mettre en comptition les ports d' une mme rgion pour
atteindre le statut de centre de transbordement. L 'Europe est patiiculirement caractrise par
cette comptition entre les ports. En effet, au Nord, les ports de Rotterdam, Anvers et
Hambourg se disputent le premier rang, tandis qu'au Sud, les potis de Giao Tauro, Algsiras
et Valence font de mme. La comptition est ce point forte, que les pmis du Nord tentent de
voler des patis de march aux ports du Sud par la mise en place de services fenoviaires
directs, entre les potis du Nord et le march mditerranen. Du ct asiatique, la sihration est
caractrise par l' impmtance des principaux centres de transbordement. En effet, les ports de
Hong Kong et Singapour, les deux principaux centres de transbordement, manutentionnent
tous les deux des volumes qui excdent vingt millions d'EVP par anne. De plus, la rcente
ouverture de la Ch ine au commerce extrieur a ncessit le dveloppement de nouveaux
terminaux de conteneurs dans ce pays. La croissance du trafic est si importante que des
terminaux qui n'existaient pas il y a elix ans manutentionnent aujourd'hui des volumes de
conteneurs qui frlent les dix millions d'EVP. En consquence, la comptition entre les ports
est trs forte pour atteindre le statut de centre de transbordement.
La rorganisation du rseau de transport maritime intemational sous une forme lmb and
spoke , ainsi que la fmie comptition qui existe entre les ports ont pour consquence de
10
crer de fmtes pressions sur les terminaux portuaires de conteneurs. ces pressions, s'ajoute
la croissance constante des volumes de conteneurs transpotis. C'est ce qui explique
pourquoi les ports sont souvent identifis comme le goulot dans les rseaux de transpoti
intermodal intemationaux. Afin de demeurer comptitifs, les terminaux potiuaires de
conteneurs doivent clone miser sur l' efficacit des oprations de transbordement.
1.3 Rle des terminaux portuaires dans le transport intermodal
Malgr qu'il existe plusieurs types de terminaux intermodaux, les terminaux qui impliquent
les manutentions les plus complexes sont les terminaux pottuaires. En effet, ceux-ci doivent
effectuer des transbordements entre divers modes de transport, comparativement aux autres
types de tenninaux qui se limitent une interface entre un ou deux modes. De plus,
l' quipement ncessa ire l'exploitation d'un tem1inal portuaire est trs dispendieux. Bien
que les quipements utiliss dans le tenninal soient semblables ceux utili ss dan s les
terminaux terrestres, la ncessit d' utiliser des grues de quais pour les transfetis entre les
navires et le quai contribue augmenter la capitalisation des terminaux pmtuaires. Le coOt de
ces grues tait estim environ 8 millions de dollars amricains en 2001 (Slack 2001). Par
contre, la taille de plus en plus impmtante des navires a entran une prolifration des grues
de type post-panamax, qui sont plus dispendieuses.
Aux cots levs d'acquis ition des quipements s'ajoute la crotsSaJ1ce importaJ1te des
volumes
manutentionns
dans
ces terminaux.
La
complexit des
oprations et
l' augmentation des volumes manutentionns confrent donc aux terminaux maritimes un rle
prpondrant dans les rseaux de transport internationaux. En effet, ils doivent tre en mesure
d'assurer un cycle de dchargement/chargement rapide. Les cots d 'acquisition et
d'opration des porte-conteneurs reprsentent des milliers de dollars pm jour, c'est pourquoi
les armateurs cherchent utiliser les terminaux les plus efficaces. Cependant, 1'efficience
oprationnelle n'est pas la seule tributaire de la comptitivit d' un p01t. Puisque les
conteneurs doivent tre ensuite livrs aux destinataires finaux, la connectivit aux modes de
transpoti terrestres joue aussi un rle important. Afin de s' adapter ces changements, des
terminaux maritimes spcialiss dans la manutention de conteneurs se sont dvelopps.
11
Le rle de ces terminaux est de servir de platefonne de transbordement entre les navll'es
ocaniqu es et les autres modes de transp01t plus locaux. Crainic et Kim (2005) identifient
trois types d' oprations de manutention dans ces terminaux : 1) les oprations po1tuaires qui
comprennent l'amarrage, le dchargement et le chargement des pOtte-conteneurs, 2) les
oprations de rception et d ' expdition en provenance ou partant vers les autres modes de
transp01t (camions, trains), 3) les activits de manutention et d' entreposage des co nteneurs
dans la cour du terminal.
Ces activits sont effectues 1'intrieur de trois zones d' oprations distinctes. La section
suivante prsente ces diffrentes zones d' oprations, ainsi que les quipem ents qui y sont
utiliss.
1.4 Organisation physique et quipements d'un terminal maritime de conteneurs
Les oprations des terminaux de conteneurs peuvent tre divises en trois grandes catgories.
La premire catgorie regroupe les oprations lies au chargement et au dchargement des
navires et barges. Ces oprations sont ralises dans la zone d' oprations portuaires. La
seconde catgorie contient l'ensemble des oprations de stockage et de manutention des
conteneurs dans la cour et les oprations sont effectues dans la zone de stockage elu
terminal. La dernire catgorie d' oprations concerne le transfert des conteneurs vers les
modes de transp01t terrestres. Les oprations de cette catgorie se droulent dans la zone
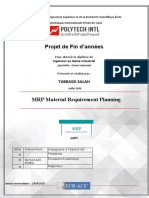
d'oprations terrestre. La figure 1.1 reprsente la disposition d' un termina l maritime
spcialis dans la manutention de conteneurs. Cette disposition reprsente un tem1 ina! qui
utilise des ponts roulants et des camions qui tirent des remorques po ur le transport interne des
conteneurs. Dans un terminal qui utili se des chariots cavaliers, les conteneurs seraient
disposs en ranges pl utt qu ' en blocs.
12
Train de marchandise
Zone d'oprations terrestres
Grue
Pile de conteneurs
Gurite
Cour
Camion externe
Zone d'oprations portuaires
Quai
Grue de quai
Porte-conteneurs
Figure 1.1 Disposition d ' un terminal maritime spcialis dans la manutention de conteneurs.
1.4.1 Zone d'oprations portuaires
Cette
zone
comprend
1'quipement
utilis
pour
effectuer
les
oprations
de
chargement/dchargement des navires ainsi que les oprations de transport entre le quai et la
cour du terminal. Le rle de cette zone est de servir de point de transfert des conteneurs entre
le terminal et les navires.
Le premier type d'quipement utilis dans cette zone est la grue de quai (figure 1.2) qui est
utilise pour le transfert des conteneurs entre les navires et le quai. Cette grue est compose
d' une structure d ' acier monte sur rails lui permettant de se dplacer le long du quai et
d' un pont roulant qui se dplace de l'avant l'arrire le long d'un mt, ce qui lui permet de
soulever les conteneurs du navire pour les poser sur les vhicules de transport interne du
terminal.
13
Bien qu'il existe des grues de quai de diverses grosseurs et de diverses capacits, deux types
de grues sont gnralement rpertoris : les grues pont roulant simple et les grues pont
roulant double (Steenken, et col. 2004). La figure 1.2 prsente une grue de quai pont roulant
simple. Pour ce type de grue, l'ensemble des manutentions est ralis par l' unique pont
roulant. Ce dernier soulve le conteneur du navire et le dpose sur le vhicule de transport
interne. Le second type de grue de quai possde l' avantage de rduire le cycle du pont roulant
affect au dchargement du navire. En effet, une plateforme btie dans l'empattement de la
grue sert de tampon entre le navire et les vhicules de transport. La grue n' a pas descendre
jusqu' au sol ce qui diminue la distance de dplacement verticale du chariot de la grue. De
plus, la zone tampon permet d'accumuler quelques conteneurs s'il n 'y a pas de vhicule
disponible au moment o le conteneur est dcharg du navire. l'inverse, lors du
chargement du navire, la zone tampon permet d'accumuler quelques conteneurs et diminue le
risque d'arrt des quipements.
Figure 1.2 Grue de quai au Port de Rotterdam (Tire de: www.ikj .nl/container)
Une fois que les conteneurs sont dchargs, il existe deux cheminements possibles pour ceuxci . La premire possibilit, la plus rpandue, consiste dposer le conteneur sur un vhicule
de transport interne du terminal, qui transportera le conteneur jusqu' la position de stockage
qui lui a t assigne. Le conteneur demeurera stock ainsi, jusqu' ce qu'il soit sur un autre
mode de transport pour tre livr au client final de la chane de transport. La seconde
possibilit consiste effectuer un transfert direct vers un autre mode de transport en
chargeant le conteneur sur un train ou un camion la base de la grue de quai . L ' objectif de
14
cette forme d'organisation des oprations est de diminuer l'espace d'entreposage ncessaire
et d'acclrer la livraison du conteneur au client. Bien qu'il ait t populaire une certaine
poque, ce concept est aujourd'hui trs peu rpandu puisque la coordination des trains et des
camions avec les oprations de chargement et dchargement des navires s' avre trs
complexe.
Tel que mentionn auparavant, dans les cas o un systme d'oprations avec transferts
indirects est utilis, des vhicules sont ncessaires pour le transport des conteneurs
l' intrieur du terminal. Pour ces transports internes, Steenken et col. (2004) dfinissent deux
catgories de vhicules : les vhicules passifs et les vhicules actifs. Dans le premier cas, les
vhicules n' ont qu'une fonction de transport et ils ne possdent pas la capacit de soulever les
conteneurs, ce que le second type de vhicule est en mesure de faire .
Il existe principalement deux types de vhicules passifs : les vhicules automatiss et les
vhicules non automatiss. Les vhicules automatiss consistent en une plateforme de
transport guide lectroniquement capable de porter l'quivalent de deux EVP la fois
(figure 1.3a). La mise en place d'un systme de transport automatis implique des
investissements importants, ce qui explique le nombre restreint de terminaux qui les utilisent.
Figures 1.3 a, b. Vhicule guid automatiquement et systme remorques multiples. (Tire de : Iaonnou et col.
2000) a Vhicule guid automatiquement au Deltaport Terminal du Port de Rotterdam. b Systme de transport
remorques multiples au Port de Rotterdam.
L'alternative consiste utiliser un systme de remorques tires par des camions oprs par
des employs du terminal. Les remorques ont la capacit de transporter deux EVP ou un
conteneur aux dimensions excdentaires la norme ISO de quarante pieds, comme les
15
quarante-cinq pieds, qui sont de plus en plus utiliss . Afin d' augmenter la productivit de
chaque dplacement de camion, certains terminaux ont mis en place des systmes
remorques multiples (figure 1.3b). C'est notamment le cas du Port de Rotterdam (Hollande),
qui utilise ce systme pour les transports inter terminaux. Ces trains de remorques permettent
le transport de dix EVP la fois (Ottjes et col. 1996). Par contre, ces systmes ne peuvent pas
tre mis en place dans tous les ports, puisque les conventions collectives des employs de la
majorit des ports amricains ne le permettent pas (Ioannou et col. 2000).
D' autres systmes passifs de transport des conteneurs ont t imagins, mais ils ne sont que
peu ou pas dvelopps. Parmi ceux-ci, les systmes de convoyeurs moteurs linaires (linear
motor conveyance system) offrent des perspectives intressantes (loannou et col. 2000) . Le
seul prototype existant d' un tel systme est celui du terminal Eurokai du Port de Hambourg
en Allemagne (figure 1.4). Le principe de ce systme consiste btir une infrastructure de
rails sur lesquels circulent les plateformes de transport des conteneurs. La principale
diffrence avec les vhicules guids automatiquement est que les plateformes peuvent
effectuer des virages angle droit. Donc, les plateformes ncessitent moins d' espace que les
vhicules guids automatiquement pour effectuer un virage. Le principal avantage de ce type
d' organisation, par rapport un systme de transport automatis conventionnel, se situe au
niveau des cots d'entretien, puisque les cots de l' investissement initial et les cots
d'oprations sont comparables (laonnou et col. 2000).
Eurokai .1 Noell
Linear motor based
transfer
Figure 1.4 Systme de convoyeur moteur linaire (Ti re de laonnou et col. 2000)
16
La seconde classe de vhicules de transport interne se diffrencie de la premire par son
autonomie d 'opration pour le dplacement des conteneurs. En effet, les chariots cavaliers
(figure 1.5) n'ont pas besoin de l' intervention d'une tierce machinerie pour soulever le
conteneur, puisqu ' ils possdent un treuil dans leur empattement leur permettant de le lever.
Comme dans la forme prcdente d 'organisation du transport interne, il existe des chariots
cavaliers automatiss et non automatiss. Cette forme de terminal automatis est moins
rpandue, le seul systme de la sorte rpertori en 2004 tait celui de Patrick
Terminal/Brisbane, en Australie (Steenken et col. 2004). L'utilisation de chariots cavaliers,
qu ' ils soient automatiss ou non, entrane d ' importantes modifications la configuration de
la cour d'un terminal, comme il sera prsent la section suivante.
Figure 1.5 Chariot cavalier (Tire de : Steenken et col. 2004)
1.4.2 Zone de stockage du terminal
La zone de stockage du terminal est la zone o sont entreposs les conteneurs lorsqu'ils sont
dchargs des navires ou en attente d ' tre chargs. Le rle de cette zone est de servir de
tampon afin d'absorber temporairement les flux de conteneurs en provenance et destination
des navires et des autres modes de transport. De plus, la zone de stockage du terminal sert
17
auss i de point de triage des conteneurs. En effet, les conteneurs qui sont entreposs dans cette
zone, sont tris selon divers critres afin de simplifier les oprations des autres zones.
Les activits au sein de cette zone sont gnralement organises en fonction du statut des
conteneurs. Les conteneurs en attente d'tre chargs sur un nav ire se retro uvent, dans la
plupmt des cas, prs de la zone d'oprations portuaires, soit prs des grues de quai. La raison
de cet emplacement est qu ' il permet de diminuer la distance parcourue par les vhicules de
transport interne lors des oprations de chargement du navire, ce qui diminue la probabilit
qu ' une grue de quai se retrouve en position d'attente. Quant eux, les conteneurs dchargs
du navire, qui quitteront le terminal par transpo1t ferroviaire, seront entreposs prs des voies
ferres de faon diminuer la distance parcourir lors du chargement des trains. L'espace
restant de la zone sera utilis pour l'entreposage des conteneurs vides et des conteneurs
dchargs des navires qui quitteront Je terminal par transport routier.
Afin d'effectuer les manutenti ons au sein de cette zone, plusieurs quipements peuvent tre
utiliss. Parmi ceux-ci, on retrouve les chariots cavaliers qui sont au ssi utiliss pour le
transport entre le quai et la zone de stockage. Une autre option est l'utilisation de ponts
roulants sur pneumatiques (figure 1.6a). Celui-c i ressembl e un chariot cavai ier, mais
possde un empattement beaucoup plus large qui lui permet de circuler au-d ess us de blocs de
conteneurs, comparativement au chariot cavalier qui peut seu lement circuler au-dessus de
ranges de conteneurs. Par contre, ce type d'quipement ne peut pas tre utili s pour le
transport de conteneurs puisque son large empattement rduit considrablement sa mobilit.
Une variante ce type de grue est le pont roulant sur rail s (figure 1.6b), qui est identique au
premier type l'exception qu ' il circule sur des rails plutt que des pneus. Bien que ce
systme soit moins flexible que le premier, il permet d' augmenter considrablement la
hauteur et la largeur des piles et il est prsentement possible d' automatiser son
foncti01111ement.
18
Figure 1.6 a, b. Pont roul ant sur pneumatiques et pont roulant sur rails. a Pont roul ant sur pneumatique au port
de Salerno en Italie (Tire de: www. ikj.nl/contai ner/). b Pont roul ant sur rail double. L'empattement plus large
du pont roulant suprieur permet aux grues de se croiser (Tire de :Steenken et co l. 2004).
Une alternative ces quipements est l' utilisation de chariots lvateurs (figure 1.7).
l' intrieur de cette catgorie, on retrouve les chariots prise par le haut (toplift), les chariots
prise par le haut avec mat tlescopique (reachstacker) et les chariots fourches (jorklift). Par
contre, ces quipements sont moins utiliss pour la manutention des conteneurs ple ins,
puisqu ' ils ncessitent un espace plus grand entre les blocs de conteneurs. Ils sont beaucoup
plus utiliss pour la manutention des conteneurs vides, puisque leur cot d'acqui sition est
moins important que celui des ponts roulants.
Figure 1.7 Chariot prise par le haut (gauche) et chariot prise par le haut avec mat tlescopique (droite). (Tire
de : loannou et col. 2000)
Il existe plusieurs stratgies pour la gestion des conteneurs l' intrieur de la zone de
stockage d' un terminal maritime de conteneurs. Gnther et Kim (2005) identifient deux types
de stratgies pour le stockage de conteneurs : les systmes de stockage directs et les systmes
de stockage indirects. Un systme de stockage direct utilise les mmes quipements pour le
19
transpoti et le stockage des conteneurs, tandis qu'un systme indirect utilise des quipements
diffrents pour excuter les deux tches. Une fonne de stockage direct consiste dposer les
conteneurs sur des remorques et stocker les remorques dans la cour. Par contre, ce mode de
stockage est en voie de disparition puisqu ' il ncessite de grands espaces; espaces qui se font
rares due aux quantits importantes de conteneurs traiter et la croissance des restrictions
environnementales au dveloppement de nouveaux terminaux (Leach 2005). Les oprateurs
de terminaux de conteneurs doivent donc se tourner vers des stratgies qui permettent
d' augmenter la densit de conteneurs dans la cour du terminal.
Une de ces stratgies consiste utiliser un systme de transp01t avec des chariots cavaliers.
La disposition du tem1inal consistera donc en plusieurs ranges de conteneurs avec entre
chaque range l'espace suffisant pour les pattes des chariots, afin que ceux-ci puissent
circuler au-dessus de la pile. Ce type d'organisation de la cour permet une meilleure
utilisation de l'espace que le systme sur remorque, mais la disposition des conteneurs en
ranges ne permet pas les gains dus la densit des conteneurs que permet un systme de
transfett indirect. L' utilisation de chariots cavaliers, tout comme le stockage de conteneurs
sur des remorques, est un systme de transfert direct, puisque le mme q uipement est utilis
pour le transp01t et le stockage des conteneurs.
La stratgie la plus rpandue pour le stockage des conteneurs est le systme de transfeti
indirect utilisant des ponts roulants sur pneumatiques. Dans ce type de configuration, les
conteneurs sont empils en blocs selon leur provenance et/ou leur destination ainsi que selon
leurs caractristiques (longueur, poids, conteneur rfrigr, etc.). Les ponts roulants circulent
au-dessus des piles et effectuent les transferts entre les piles et les vhicules de transport
interne.
Une autre stratgie de transfeti indirect utilise une configuration similaire, mais avec des
quipements de manutention diffrents. Ces quipements sont les chariots prise par le haut
(toplift), les chariots prise par le haut avec mat tlescopique (reachstacker) et les chariots
fourches (jrklift).
20
Peu importe la stratgie utilise, la superposition de conteneurs, bien qu 'elle permette une
meilleure utilisation de l'espace, entrane le risque d'avoir remanier les conteneurs. Un
remaniement est ncessaire lorsqu ' un conteneur est situ sous un autre conteneur. Par
exemple, le conteneur A de la figure 1.8 est directement accessible, tandis que l'extraction du
conteneur B ncessite un remaniement du conteneur C. Des piles de conteneurs levs
entranent une plus grande probabilit d'avoir effectuer des remaniements.
0
0 00
0 000
Figure 1.8 Pile de conteneurs
Dans le but d'viter ces remaniements, des concepts de systme d'entreposage et extraction
automatis (automated storage/retrieval system) ont t dvelopps. Ces systmes consistent
en une structure d 'entreposage de plusieurs tages l' intrieur de laquelle un systme
automatis, de cueillette et de dpt des conteneurs, permet de manipuler uniquement le
conteneur dsir. La localisation et la manutention des conteneurs l'i ntrieur de la structure
sont grs par le systme de contrle du systme. Un systme d 'entreposage et d'extraction
automatis remplacerait un bloc de conteneur dans un terminal traditionnel, tel qu ' illustr sur
la figure 1.9. 1' heure actuelle, la seule application existante de ce systme est au port de
Hong Kong. Par contre, le systme n'a pas t mis en place dans le contexte d'opration d'un
terminal, puisqu'il est situ l'extrieur des terminaux et qu'il est utilis pour le stockage des
conteneurs vides seulement.
21
Figure 1.9 Systme d'entreposage et d' extraction automatique. (Tire de loannou et col. 2000)
1.4.3 Zone d'oprations terrestres
La zone d'oprations terrestres est la zone o sont effectues toutes les oprations de
rception et d'expdition des conteneurs provenant de trains, de camions et de barges. Le rle
de cette zone est de servir d'interface entre le terminal et les moyens de transport
prcdemment mentionns. De plus, ce rle d'interface implique que c'est cette zone qui est
responsable de la gestion des entres et sorties des trains et des camions.
Les quipements utiliss pour la manutention des conteneurs dans cette zone dpendent du
systme de transfert qui a t choisi dans la zone de stockage du terminal. En effet, les
terminaux maritimes de conteneurs utilisent gnralement le mme type d'quipement dans
les deux zones. Cette concordance des systmes de transfert a pour but de maximiser
l'utilisation des quipements. Pour ce qui est de la gestion des entres et sorties des camions,
elle se fait via la gurite du terminal. Celle-ci consiste en une zone assortie de plusieurs voies
d' accs au terminal (figure 1.1 0).
22
Figure 1.10 Gurite d ' un terminal de conteneurs. (Tire de : www.cpsh ips.com)
En ce qui concerne les oprations sur les camions, la premire tape est de grer l'entre et la
sortie de ceux-ci du terminal. La formule classique pour la gestion de ces oprations consiste
avoir des employs posts aux diffrentes voies d 'accs de la gurite qui valident la
concordance de la documentation avec le conteneur charg sur le camion . Rcemment, des
systmes d'automatisation des oprations de la gurite ont t dvelopps. Ces systmes
reposent sur l'utilisation de camras numriques et de logiciels de reconnaissance optique des
caractres. Un portail situ dans la file d 'attente de la gurite prend une srie de photos du
conteneur et du camion sous diffrents angles . Le logiciel de reconnaissance optique des
caractres utilise les photos pour dterminer le numro du conteneur et de l' immatriculation
du camion. Ces informations sont achemines une base de donnes qui envoie une
autorisation d'accs au terminal si les informations concordent. Le processus est le mme la
sortie du terminal, l' exception que le portail se trouve l' intrieur du terminal.
Outre le contrle des entres et sorties de camions du terminal , la zone d 'oprations terrestre
est aussi le lieu du terminal o se droulent les oprations sur ces camions. Selon le type
d'organisation de la cour et le type d'quipement de transport interne qui a t choisi, ces
oprations seront diffrentes pour les conteneurs reus/expdis par camions. En effet, si la
cour est organise en blocs de conteneurs, le camion est charg/dcharg prs de la pile o le
conteneur est entrepos.
Par contre, dans le cas o le terminal utiliserait des chariots
23
cavaliers, une zone de manutention doit tre amnage. Dans celle-ci, les cam10ns sont
dchargs par les chariots cavaliers qui transpottent ensuite le conteneur jusqu' son
emplacement d' entreposage (Steenken et col. 2004) . Dans le cas d' un chargement, la
squence d'oprations est inverse.
En ce qui a trait aux trains, la gestion des entres et sorties du terminal s'effectue auss i au
sein de la zone d'oprations terrestres. Par contre, d aux frquences plus fa ibles des
mouvements de trains, la gestion de ceux-ci s'avre plus simple que la gestion des entres et
sorties de camions. C'est pourquoi les mouvements so nt grs partir d' horaires tab lis par
l'oprateur du chemin de fer qui confinne les mouvements de trains avec le terminal. Les
oprations de chargement et de dchargement des trains sont gnralement effectues par des
ponts roulants et le transport des conteneurs entre la pile et les wagons est effectu par des
chariots cavaliers, des camions ou des vhicules guids automatiquement. Certai ns terminaux
qui ont mis en place un systme de transfe1t direct utilisant des chariots cavaliers, utili sent
aussi ceux-ci pour les oprations sur les trains (Steenken et col. 2004).
La zone d'oprations terrestres est aussi le lieu o sont parfois ralises les oprations de
dchargement et de chargement des barges. En effet, bien qu e les barges constituent un
moyen de transpmt pour la distribution rgionale des produits, au point de vue oprationnel,
le chargement et le dchargement de celles-ci se font de la mme faon que les
transbordements sur les navires ocaniques. Donc, dan s ce1tains terminaux, les oprations sur
les barges sont ralises cl ans la zone d'oprations portuaires . Par contre, clans d'autres cas,
une section du terminal est amnage pour les opration s sur les barges dans la zone
d'oprations terrestres. Une telle section est semblable la zone d'oprations portuaires, mais
les grues de quais utilises sont plus petites, afin de diminuer les cots d' exploitation.
La zone d'oprations terrestres peut constituer un terminal spciali s l' intrieur du port,
mais exteme au terminal maritime. Cette forme cl ' organisation permet de spcialiser une
section du pott dans la manutention d'un ce1tain type de mode de transpo1t, mais occasionne
des transports entre les terminaux, comme c'est le cas au terminal Maasvlakte du Port de
Rotterdam (Ottjes et col. 1996).
24
1.5 Flux d'informations et systmes de communication et de gestion des terminaux
Les activits des terminaux de conteneurs, se droulant dans les zones d'oprations
prsentes prcdemment, sont supportes par de nombreux flux d' informations. Ces flux
peuvent tre regroups en trois catgories : les flux en amont du terminal, les flux internes du
terminal et les flux en aval du terminal. Afin de grer ces informations, les terminaux de
conteneW's utilisent des systmes d' information. L'objectif de cette section n'est pas de
prsenter le dtail des flux d'informations, mais une vision gnrale . Le chapitre trois de ce
mmoire prsente les flux d' informations de faon plus dtaille.
1.5.1 Les flux en amont du terminal
Les flux en amont du terminal regroupent
Lm
ensemble d' informations ncessa ires la
coordination des oprations. Ils incluent notamment les plans de chargement des navires,
barges et trains destination du terminal, les diverses informations sur les conteneurs
(destination, caractristiques, etc.) et les informations provenant des autorits douanires. Ces
changes se font avec plusieurs intervenants qui comprennent les lignes maritimes, les agents
maritimes, les transitaires, les compagnies de transport routier et ferroviaire, les agences
douanires et plusieurs autres . Ces communications se font de plusieurs faons, notamment
par change de donnes infom1atises, par fax et par tlphone.
1.5.2 Les flux internes du terminal
Une multitude cl' informations circulent 1' intrieur du terminal. Ces informations sont
ncessaires la gestion des oprations du terminal. Elles concernent donc la position et les
mouvements des conteneurs, les tches excuter et 1'affectation des quipements du
terminal ces tches . Ces infom1ations sont transmises par communications orales par radios,
par changes de donnes via radios frquences et par communications directes.
Rcemment, avec le dveloppement de terminaux automatiss, la quantit d'informations qui
circulent a grandement augmente. En effet, l'automatisation des oprations ncessite de
nombreuses communications entre les quipements et le systme de contrle de ceux-ci. Bien
25
entendu, ces communications sont automatises et transigent via des systmes de
communications lectroniques.
1.5.3 Les flux en aval du terminal
Les flux en aval du terminal comprennent un ensemble d'infom1ations ncessaires la suite
des oprations de transport des conteneurs dans le rsea u de transport intermodal. Ces
informations sont les plans de chargement des navires, trains et barges qui quittent Je
terminal, et les rapp01ts de livraison des conteneurs. Ces changes se font avec les mmes
intervenants et avec les mmes technologies que les changes en amont du terminal.
1.5.4 Les systmes de communication et de gestion des terminaux
Les systmes de communication et de gestion des terminaux sont un ensemble de
technologies qui supportent les processus physiques d' un terminal. Leur principale fonction
est de vhiculer l' information ncessaire au droulement des activits elu terminal.
Le systme au cur du processus de gestion du terminal est le systme d' opration du
terminal. En effet, c'est ce systme qui gre les informations sur les conteneurs et sur les
oprations du terminal. Ces informations incluent le positionnement des conteneurs sur le
terminal, la destination des conteneurs, le mode de transport utilis pour atteindre cette
destination, les caractristiques du conteneur et du matriel qu'il contient (matire
dangereuse et classe de celle-ci) et les plans de chargement des navires, trains et barges qui
frquentent le tenninal.
Ces informations proviennent de sources multiples. Les informations sur les oprations du
terminal peuvent provenir de transmetteurs de donnes radios utiliss par les employs du
terminal. Un transmetteur de donnes radios est un terminal informatique manuel qui
communique avec le systme d'oprations du terminal, ce qui permet une mise jour des
infonnations en temps rel. L ' altemative aux transmetteurs de donnes radios est la prise
d'information manuelle par les employs elu terminal. Le dsavantage de cette mthode est
qu ' elle demande une entre de donnes manuelle, ce qui augmente le risque d'eneurs et ne
26
pennet pas une information en temps relle. Pour ce qui est des infom1ations qui ne
proviennent pas des oprations du terminal, elles proviennent des intervenants en amont et en
aval du terminal. Une grande prui de ces informations est achemine au systme d' opration
du terminal par change de donnes informatise.
1.6 Cheminement d'un conteneur l'intrieur du terminal
par1ir de ces descriptions, il est possible d'tablir le cheminement d' un conteneur travers
le terminal. L'objectif n'est pas de dtailler les processus oprationnels d' un terminal
maritime de conteneurs, ce sujet faisant l'objet d' un chapitre subsquent. ce moment, il
s' agit de prsenter les principales tapes du cheminement des conteneurs dan s le terminal.
Lorsque le navire se prsente au terminal , un quai doit tre assign celui-ci . Conj ointement
cette assignation, un nombre de grues de quai est rserv pour travailler sur le navire. Une
fois le navire accost au quai, les conteneurs sont saisis par la gru e de quai et dpos sur un
vhicule de transpm1 interne. Celui-ci se dirige ensuite vers la pile qui a t assigne au
conteneur et il est transfr dans celle-ci par un pont roulant sur pneumatiques. Suite une
priode d'entreposage, le conteneur est transfr vers un autre mode de transport et livr au
client. La suite d'oprations est inverse clans le cadre d ' opration s d' exportations de
conteneurs.
1. 7 Conclusion
Ce chapitre a situ le transport maritime et les terminaux maritimes de conteneurs au sein des
rseaux internationaux de transport intennodal. De plus, les sections 1.4 1.6 ont prsent
1'organi sation gnrale des oprations et les quipements utiliss dans ces terminaux. pru1ir
de cette prsentation sommaire du fonctionnement de ces terminaux, il apparat vident que
la gestion des oprations de ces terminaux prsente plusieurs problmatiques. Dans le but
d' approfondir la comprhension de la logistique des terminaux po11uaires de conteneurs, le
chapitre suivant prsente les problmes de plru1ification et de gestion des tenninaux
maritimes de conteneurs.
CHAPITRE II
PROBLMES DE PLANIFICATION ET DE GESTION DES TERMINAUX MARITIMES
DE CONTENEURS
L'objectif de ce chapitre est de prsenter les diffrentes problmatiques lies la gestion des
terminaux maritimes spcialiss dans la manutention de conteneurs ains i que la littrature qui
traite de ces problmes. Pour ce faire, l'approche utili se consiste regrouper les diffrentes
problmatiques selon les trois niveaux de planification gnralement utili ss en gestion :
stratgique, tactique, opratimmel. ces trois niveaux de planification un quatrime est
ajout afin de reflter les rcents dveloppements en automatisation des oprations
pm1uaires : la planification en temps rel. Ces quatre niveaux constituent les sections 2.1
2.4 du chapitre. Ces sections prsentent diffrentes contributions provenant du domaine de la
recherche oprationnelle. La section 2 .5 du chapitre traite des systmes intelligents de
transport dans les ports, mais prsente des contributi ons provenant de domaines autres qu e la
recherche oprationnelle. De plus, cette section traite de syst mes d'aide la dcision en
dveloppement.
2.1 La planification stratgique
La planification stratgique d' un terminal maritime de conteneurs concerne les dc isions qui
portent sur le design du tem1inal. Ces dci sions concernent princ ipalement le type
d'quipements utiliss et la disposition du terminal (Meersmans et Dekker 2001). Il est
important de spcifier que ces dcisions sont caractrises par un arbitrage entre le niveau de
service offe1t aux clients et Je niveau d' investissement pour le dveloppement du termina l.
Un accroissement de la capacit du terminal ncessite des investissements majeurs dus aux
cots importants de la construction du terminal et de l'acqui sition des quipements de
manutention (Crainic et Kim 2005). Le niveau de service d'un tenninal dpend de la
disponibilit des quais et de la capacit de celui-ci offrir des oprations de dchargement et
de chargement rapides. En effet, un niveau de service insuffisant a pour consquence de crer
des fi les d' attentes de navires pour l' accs au tenninal, ainsi qu'tm prolongement du temps
28
quai des navires. L ' horizon de planification des dcisions stratgiques s'tend sur plusieurs
annes (Vis et de Koster 2003). Bien que les sous-sections suivantes prsentent ces dcisions
comme distinctes, il s'avre difficile de le faire, puisque chaque dcision entrane des
rpercussions sur les autres. C'est pourquoi la dernire sous-section concerne les tudes qui
traitent du design d ' un terminal dans son ensemble.
2.1.1 Localisation
La premire dcision stratgique lie la planification et la gestion des terminaux
pmiuaires est l'emplacement du terminal. Bien que le problme de la localisation d'un
terminal portuaire de conteneurs n ' ai pas t trait directement, des problmes de locali sation
simi laires peuvent tre rpertoris dans la littrature sur le sujet. L ' objectif des problmes de
localisation est de trouver un emplacement pour le terminal qui minimisera les cots de
transpmt vers les principaux marchs desservir. En ce sens, ces problmes sont une pattie
d' un problme plus gnrale de design de rseau de transport. Pour une revue de la littrature
concernant les problmes de design de rseau, le lecteur peut se rfrer Crainic (2000).
Crainic et Kim (2005) prsentent diverses formulations de problmes de localisation . Parmi
celles-ci, on retrouve le problme de localisation de terminaux avec q uilibrage introdu it par
Crainic, Dejax et Delonne (1989). L ' objectif de ce problme est de dterminer
l' emplacement de dpts intermdiaires de conteneurs afin de minimiser les mouvements de
conteneurs vides. Un modle de localisation de hub est aussi prsent par Crainic et Kim
(2005) . L'objectif de cette formulation est de minimiser les coCtts totaux du systme de
transport en optimisant la position des centres de consolidation (bub ).
Dans les deux types de modles de localisation prcdemment prsents, la complexit des
modles rend la rsolution difficile. C'est pourquoi plusieurs mthodes de rsolution
heuristiques et mta-heuristiques ont t dveloppes comparativement au faible nombre de
mthodes exactes .
29
2.1.2 Nombre de quais
Une fois l'emplacement du terminal choisi, la dcision suivante au niveau du design d' un
tem1inal maritime de conteneurs consiste dterminer le nombre de quais qui sera mis la
disposition des pmte-conteneurs. L'objectif de cette problmatique est de dterminer un
nombre de quais optimal. Il est entendu par optimal que le design choisi permettra un
quilibre entre le niveau de service aux porte-conteneurs, les cots de co nstruction et
d'exploitation du terminal et la capacit d'adaptation aux variations de vo lume. Un plus
grand nombre de quais permettra d'offrir un meilleur service en dimin uant les risques de
congestion des quais. Par contre, plus le nombre de quais augmente, plus les risques
d' interfrences entre les oprations des cl iffrents navires augmentent. En effet, une
augmentation du nombre de quais ncessite plus d 'quipement pour les oprations de
transport et d'entreposage des conteneurs, donc, plus de circulation dans le terminal.
De plus, une augmentation du nombre de quais permet de diminuer le taux d' utili sation de la
capacit du tenninal, puisqu'elle augmente la capacit elu terminal. Cependant, cette
diminution entrane une augmentation des cots d'exploitation , puisque des investissements
plus importants sont absorbs par un mme vo lume d' activits. Le problme de la
dtermination du nombre de quais doit donc prendre en considration les cots associs au
temps d'opration sur les navires, les cots de construction des quais et les cots d'oprations
des quais. Ces derniers cots font rfrence aux cots qu ' imp lique l' ut il isation d'un quai, soit
le cots des quipements, de la main d'uvre, etc.
La majorit des tudes po1tant sm le problme de la dtem1in ation du nombre de quais
utilisent des approches descriptives reposant sur des modles probabilistes ou sur la thorie
des files d'attentes. Parmi les premires tudes, Fratar, Goodman et Brant (1960) reprsentent
le taux d'occupation d'un quai commercial l' aide d'une loi de Poisson. partir de cette
distribution, ils dterminent le taux d'occupation maximale des quais d'un terminal selon le
nombre de quais du terminal, pour un terminal dsirant maintenir un niveau de service de
95%. Le niveau de service est dfini comme la proportion de jours dans 1' anne o les
navires n' ont pas attendre pour obtenir un quai. La principale conclusion des auteurs est que
30
le taux d 'occupation max imal des quai s d ' un terminal augmente avec le nombre de quai s du
terminal, mai s un taux dcroissant.
Miller (1971) utilise la thorie des files d ' attentes pour dtenniner le taux d'occupation d ' un
terminal possdant un seul quai. Le modle est descriptif et prsente une approche de
simulation pour dterminer les dlais d'attente moyens pour un terminal d'un seul quai.
Parmi les tudes plus rcentes, on retrouve celle de Ramani (1996). Il prsente un e simu lation
pour la planification gnrale du dveloppement de terminaux portuaires spc ialiss clans la
manutention de conteneurs. Cette simulation s' inscrit dans une perspective macro plutt que
micro. En effet, l'objectif de l' auteur est de dtermin er les infrastructures ncessa ires lors elu
dveloppement d' un nouveau terminal, notamment le nombre de quais. L ' va lu ation des
besoins ncessaires est faite en comparant di ff rentes configurations possibles . Afin de
comparer ces configurations, les mesures utilises sont le taux d 'occupati on des quais, les
temps d 'attente des navires, la productivit aux diffrents quais et le temps de cycle
(dchargement et chargement) des navires. La s imulation a t teste sur des terminaux
maritimes de contene urs en Inde.
2.1.3 Nombre de grues de quai
Le nombre de grue de quai est troitement li au nombre de quats, puisqu ' un quat
supplmentaire a une utilit restreinte s'i l n' est pas quip pour recevoir les navires.
L'objectif du problme du nombre de grues de quais est de dterminer un nombre de grues
qui permettra d 'offrir un niveau de service lev aux navires qui frqu entent le termin al tout
en minimi sant les investissements lis l'acquisition de l'quipement. Comme dans le cas du
nombre de quais construire, le nombre de grues de quai doit permettre au terminal d'tre en
mesure d'absorber les variations futures du volume de conteneurs manutenti otln s. De plus,
la dcision doit tenir compte du fait que la productiv it du quai augmente avec le nombre de
grues installes, mais un taux dcroi ssant puisque le risque d ' interfrence entre les grues
augmente (Crainic et K im 2005) . Le nombre de grues de quai installer sur un terminal
constitue une dcision impmtante puisqu' elles reprsentent l'quipement le plus dispendieux
sur le terminal.
31
ce sujet, Daganzo (1989) a dvelopp un modle stochastique pour va luer la perfonnance
de stratgies d 'opration des grues de quai. Celui-ci peut tre utilis pour dterminer le
nombre de grues de quai, en mesurant le profit associ l'augmentation de la productivit du
terminal. Cette augmentation provient de l'ajout d'une grue supplmentaire et considre les
cots cl' acquisition et d'opration de celles-ci.
2.1.4 Systme de transport interne du terminal et design de la cour du terminal
Le choix du systme de transport interne du tenninal est une dcision critique dans le design
de ce dernier. En effet, selon le systme choisi, l' organisation du terminal sera diffrente.
Steenken et col. (2004) identifient certains facteurs de dcisions pour le choix de ces
quipements, soit: les restrictions d'espace, des facteurs historiques et conomiques. Le
premier facteur s'avre pmticulirement impottaJ1t dans les rgions o l'espace est restreint.
Par exemple, les principaux potts d'Asie (Hong Kong, Singapour, Busan, Kobe et
Kaohsiung) utilisent une organisation des conteneurs en blocs avec des ponts roulants sur
pneumatique pui sque cette stratgie permet une forte densit de conteneurs (Crainic et Kim
2005) . Au niveau conomique, ces dcisions peuvent tre justifies par des cots de main
cl 'uvre levs. Les facteurs de dcision historiques lient les dcisions prsentes aux
dcisions passes, puisqu'w1 changement majeur au systme de transpott interne entrane des
investissements importants et une rorganisation des processus du terminal.
L'objectif du choix du systme de transport inteme du terminal est de dterminer une
organisation des oprations de transport qui permettra de minimiser les cots d'oprations du
terminal et de maximiser le niveau de service aux grues de quai. Par maximisation du service
aux grues de quai , il est entendu que l'objectif est de minimiser les temps morts. En effet, un
ant d' une grue a un impact direct sur le temps quai du navire, clone sur le service la
clientle, qui cherche minimiser son sjour dans le port. Ces deux objectifs sont en quelque
s01te contradictoires, puisque la probabilit d' ant de la grue diminue lorsque le nombre de
vhicu les de transpott augmente; ce qui, par le fait mme, fait augmenter les cots totaux
d' acquisition du systme.
32
Quant au problme elu design de la cour elu tenninal, 1' objectif est de dterminer une
organisation de la cour qui permet de minimiser les cots d'acquisition, tout en minimisant
les possibilits de remaniements de conteneurs. Comme dans le cas prcdent, ces deux
objectifs sont contradictoires. En effet, afin de minimiser le nombre de remaniements
possibles, la hauteur des piles doit tre minimise. Par contre, la minimisation de la hauteur
des piles ncessite une plus grande surface d'entreposage dans la cour, ce qui fait augmenter
le cot d' acquisition du terrain.
II a t choisi de prsenter ces deux problmes simultanment, puisque ces dcisions sont
lies. En effet, le choix du systme de transpmt aura ncessairement un impact sur le des ign
de la cour du terminal, puisque selon le systme choisi les piles de conteneurs sero nt plus ou
moins denses.
La simulation peut tre utilise comme outil de conception et d'valuation pour le des ign du
systme de transpmt inteme du tem1inal. Dans cet ordre d'ide, Vis et Harika (2004)
proposent une simulation qui a pour objectif de dterminer quel type de vhicu le utiliser cl ans
un terminal automatis. La simulation compare un terminal utilisant des vhicules de
transpoti guids automatiquement et des vhicules de leve automatique (chariots cavaliers
guids par ordinateur). La base de comparaison utilise est l'effet de l' utilisation de l'un ou
l' autre des types de vhicules sur le temps de dchargement elu nav ire, le degr d'occupation
des divers quipements et le nombre de vhicules requis. La simulation utilise des donnes
recueillies au Euro pean Combinee! Tenninal du port de Rotterdam. La conclusion de
l'tude est que le systme avec vhicules de leve automatique est souhaitable dans le cas
d' une dcision base sur le cot d ' acquisition seulement.
Par contre, une analyse de
sensibilit rvle que la disposition du terminal et une variation des aspects teclmiques de la
grue de quai (diminution du temps de cycle) ont pour effet de modifier le choix du type
d'quipement lorsque le critre de slection est le cot d'acquisition.
Afin de tenir compte des effets que peuvent avoir les diffrentes dcisions les unes sm les
autres, il est possible de j Lm1eler certaines dcisions lies au design du terminal. C'est le cas
de l'tude Kim et Kim (1998), qui combine une dcision sur le systme de transpo1t interne
33
une dcision sur l'organisation de la cour elu terminal. En effet, ils proposent un modle pour
dtenniner l'espace et le nombre de ponts roulants sur pneumatiques ncessa ires aux
oprations de manutention des conteneurs imports. Le modle dvelopp vise minim iser
les cots d' investissements (cot d'achat des ponts roulants), les cots d 'espace et les cots
variables des ponts roulants sur pneumatiques et des camions, qui sont lis au temps pass
clans le terminal par ces derniers. Un exemple numrique permet aux auteurs de ti rer deux
conclus ions . La premire est qu'il existe une corrlation ngative entre 1'augmentation elu
cot de l'espace et la taille de l'aire d'empilement des conteneurs, tandis que la seconde est
que le nombre optimal de ponts roulants et la taille optimale de l'espace d' empilement des
conteneurs augmentent lorsque le cot des camions externes augmente.
2.1.5 Degr d'automatisation des oprations
La planification stratgique des oprations d'un tenninal maritime de conteneurs implique
aussi de dterminer le degr d' automatisation des oprations. L'automatisation des oprations
peut se faire plusieurs niveaux. Le plus lev consiste dvelopper un terminal qui est
pratiquement entirement automatis, comme le terminal Delta SeaLand du Po rt de
Rotterdam. Dans ce terminal, le transport des conteneurs est automatis, tout comme le
transfert des conteneurs entre les vhicules et les piles qui est effectu par des ponts roulants
automatiques.
La dcision sur le degr d'a utomatisation des oprations d' un termina l maritime de
conteneurs a pour objectif de dterminer le niveau d'automatisation adquat d' un terminal.
L'automatisation des oprations ncessite un volume de conteneurs important, puisque les
cots d'acquisition des quipements automatiss sont trs levs, d'o l' importance d'un
volume impo1tant afin de les rentabiliser. C'est pourquoi le niveau d'automatisation des
oprations souhaitable varie selon les terminaux.
Liu et col. (2000) prsentent une simulation qui compare trois organisations diffrentes du
transport interne d ' un terminal : un systme non automatis, un systme de convoyeurs
moteurs linaires et un systme de vhicules guids automatiquement. La simulation est
applique au port de Norfolk, situ sur la cte est amricaine. En se basant sur les rsultats
34
obtenus, les auteurs affirment que l'automatisation permet de doubler la productivit du
terminal. Les deux formes d'automatisation pennettent une productivit semb lable pour le
mme nombre de vhicu les. Cependant, les vhicules guids automatiquement prsentent un
taux d' inactivit plus lev, ce qui laisse prsager la poss ibilit d'une productivit suprieure
par une meilleure stratgie de dploiement.
Ottjes, Duinkerken, Evers et Dekker (1996) ont dvelopp une simulation qui compare trois
types d'organisation des oprations de transport inter terminal pour le terminal Maasvlakte du
port de Rotterdam. L'objectif de la simulation est de dterminer qu'elle serait le systme le
plus efficace pour effectuer les transports entre terminaux prvus pour 1'anne 2005. Le
volume de transfert prvu tait de 1 400 000 conteneurs EVP au moment o la recherche a
t effectue. La simulation compare trois organisations distinctes, le systme remorques
multiples qui tait ce moment utilis, l' utilisation cie vh icu les guids automatiquement et
1'utilisation de vhicules de leve automatiques. Il est important de noter que le systme
remorques multiples n'est pas automatis. Les trois possibilits voq ues sont compares en
mesurant le niveau d'inefficience de chacune. Celui-ci est dfini comme le pourcentage de
vhicules arrivant destination avec un retard. La simulation repose sur deux modles : le
modle gnrateur, qui simule le flux de conteneurs entre les composantes du terminal et le
modle <nter tenninal t:ranspoit qui simule le processus complet l'aide des donnes du
premier modle.
Les conclusions de 1'tude sont que le systme avec vhicu les guids
automatiquement offre la so lution la plus performante sur la base des cots des diffrents
systmes,
car
le
systme
avec
vhicules
de
leve
automatiques
ncessite
des
perfectionnements.
2.1.6 Terminaux complets
Tel que mentionn dans l'introduction de cette section, il s'avre difficile de considrer les
dcisions, concernant le design elu terminal, indpendamment les unes des autres. C'est pour
quoi cette sous-section se consacre aux tudes p01tant sur le design elu terminal clans son
ensemble. DC'l la complexit qu'entrane la considration de l' ensemble des dcisions sur le
design du terminal, la majorit des tudes sur le sujet est base sur la simulation.
35
Kia et co l. (2002) qui proposent une simulation qui compare deux fom1es d'organisation des
oprations. Dans le premier cas, le terminal simul utilise un systme de blocs de conteneurs
et de pont roulant sur pneumatiques, o environ 85% des conteneurs sont livrs par camions.
Dans le second cas, un systme de transfett direct entre les navires et des trains est simul.
Dans ce systme, les conteneurs sont dchargs des navires et dposs directement sur des
trains qui les transportent ensuite un dpt terrestre. Les conclusions de 1'tud e sont que le
second systme pennet une rduction du temps quai du navire ainsi qu'une rduction du
taux d'utilisation de l'espace de la cour, espace qui est de plus en plus rare. Par contre, les
auteurs mentionnent que la simulation ne tient pas compte des dlais ou annulations de trains.
Ces dlais peuvent avoir un impact imp01tant sur les flux de conteneurs et sur la
synchronisation des oprations ferroviaires et p01tuaires.
Sgouridis et Angelides (2002) prsentent une simulation d'un terminal qui utilise des chariots
cavaliers pour le transp01t interne des conteneurs. La simulation est utilise pour reprsenter
le port de Thessaloniki, situ dans la mer mditerrane. L'outil dvelopp permet d'valuer
divers scnarios lors du design d'un nouveau terminal ou il peut servir comme systme d'aide
la dcision pour l'agrandissement d 'un tenninal existant. Par contre, il ne permet pas de
simuler des terminaux utilisant un autre systme de transpmt interne que les chariots
cavaliers.
Liu et col. (2002), quant eux, comparent quatre organisations diffrentes de tenninaux
automatiss. Les quatre organisations en question sont: 1) un terminal utilisant des vhicules
de transpott automatiss 2) un tenninal quip de convoyeurs moteurs linaires 3) un
terminal comprenant un systme de navettes sur rails ariens (overhead grid rail .system) 4)
un terminal muni d' un systme entreposage et extraction automatique (automated
storagelretrieval .system). Les deux demiers systmes utilisent des vhicules guids
automatiquement pour le transport entre les piles et le navire. Les critres de comparaison des
diffrentes fom1es d'automatisation sont la productivit et les cots lis chacune des
options. Les diffrents tests mnent les auteurs aux conclusions que la performance des
diffrents systmes est comparable, mais que le systme d'entreposage et extraction
automatique permet une productivit accrue en termes d' espace d'entreposage. De plus, le
36
systme avec convoyeurs moteurs linaires s'avre le plus dispendi eux, cl 1' infrastructure
ncessaire sa mise en place.
Une approche de simulation diffrente a t utilise par Alessandri, Sacone et Siri (2004), qui
reprsentent les conteneurs et leurs mouvements par des files d'attentes. Ces file s d'attentes
reprsentent le travail effectuer par les diffrentes ressources du terminal. Les activits de
transfert de ces ressources sont reprsentes par des quation s de temps di screts (discrete-
time equations) et l'volution dynamique des diffrentes files d'attentes dpend de
l' utilisation des ressources du terminal. Au niveau du design du terminal , cette mthode a
l'avantage de facil iter la variation de la capacit du terminal par une simple modification de
cette variable.
2.2 La planification tactique
Au niveau tactique, les dci sions concernent l'organisation des oprations du termi nal de
faon gnrale. Plus prcisment, la planification tactique vise dterminer quels
quipements seront allous quel ensemble de tches qui doivent tre complts, clone
l'allocation de la capacit du terminal. L' horizon de planification de ces dci sions co uvre des
priodes allant de quelques jours quelques mois (V is et de Koster 2003).
2.2.1 L'allocation de quais aux navires
l' arrive du navire, un quai (espace o sera amarr le navire) doit lui tre assign. Ainsi, la
dcision doit tenir compte non se ulement de l'espace disponible l' arrive du nav ire, mais
auss i des besoins futurs en quais pour les nav ires aJTivant prochai nement. C'est pourquoi la
planification doit tre fait pour une priode suffisam ment longue pour viter une file
d'attente, le temps quai tant une priode sans gnration de revenus pour les armateurs.
L' objectif elu problme d' allocation de quais est de dtenniner un horaire d'affectation des
navires aux quais qui pennet de diminuer le temps total d'excution des oprations. Pour ce
faire, plusieurs facteurs doivent tre considrs. Tout d' abord, la disponibilit des quais et les
caractristiques de ceux-ci et des navires. En effet, le plan d' allocation choisi doit viter qu'il
37
y ait des interfrences entre les navires et il doit respecter les contraintes lies
la taille et au
tirant d eau des navires, afin d'viter l'allocation d 'un navire un quai qui ne peut pas le
recevoir. Ensuite, l'emplacement des conteneurs sur le terminal doit tre considr. Plus les
conteneurs sont situs loin du navire, plus les risques de dlais des oprations augmentent. De
plus, une grande distance entre le navire et la pi le de conteneurs peut entraner la ncessit
d'ajouter des vhicules de transpmt interne, afin d' viter les dlais, ce qui fait augmenter les
cots cl' oprations et les risques de problmes de congestion elu terminal.
Guan et Cheung (2005) proposent trois modles pour le problme de l'allocation de quais aux
navires. Les trois modles reposent sur un diagramme espace-temps, o l' abscisse reprsente
le temps et l'ordonne reprsente les sections du quai. Un navire est donc reprsent sur le
diagramme par un rectangle pour lequel la hauteur reprsente la taille du navire et la lon gueur
reprsente le temps des oprations de dchargement et de chargement. Ces modles ont tous
le mme objectif, soit de minimiser la somme des temps quai des navires multiplie par un
facteur d'impmiance relative de ceux-ci pour le terminal. Le premier modle est appel la
fonnulation selon la position relative (relative position formulation). Cette formulation
considre la position des rectangles les uns par rappott aux autres et vise empcher un
chevauchement des rectangles clans le diagramme espace-temps. Le second modle est la
fonmt!ation par assignation de position (position assignment formulation). Cette fonnulation
suppose une partition de l'espace-temps en blocs unitaires, o chaque bloc a la hauteur d' une
section de quais et la longueur d'une unit de temps. La formulation considre donc les
navires selon leur position sur la surface espace-temps. Le troisime modle est une
relaxation de la fonnulation par assignation de position.
Afin de rsoudre ces modles, les auteurs dveloppent une heuristique, laquelle ils ajoutent
une recherche par arborescence (!ree sem-ch procedure). La recherche par mborescence
insre les navires dans le diagramme espace-temps par ordre chronologique et utilise des
bornes infrieures et suprieures afin d' effectuer des coupes et de diminuer le nombres de
branchements. L'heuristique regroupe d'abord les navires en lots selon leur temps d'arrive.
Ensuite, le lot dont la taille totale est la plus petite est choisi et une position sur les quais est
assigne aux navires qui compose ce lot. Cette procdure est rpte jusqu ' ce qu ' une
38
solution ralisabl e soit obtenue. U ne fois cette so lution obtenue, une procdure d' change
entre les lots est utilise. Pour chaque lots voisins l'un de l'autre dans le diagramme espacetemps, les rectangles sont changs par pairs et si 1'change permet de rduire la valeur de la
so lution, il est retenu . Finalement, dans un second temps, la recherche par arborescence est
applique la solution obtenue suite la procdure d 'change.
Afin de valider l'algorit lm1e dvelopp, les auteurs ont effectu des tests qut comparent
l' heuristique, 1' heuristique avec la recherche par arborescence et une mthode exacte utilisant
un branch and bound . Leurs conclusions sont que l' heuristique est efficace pour gnrer
de bonnes solutions initiales et que l'ajout de la recherche par arborescence ce lu i-ci s'avre
p lus efficace que la mthode exacte, qu i ncessite des temps de calcu ls trop impo rtants .
Pour des raisons d 'espace disponible ou d aux co('tts importants de dve loppement d ' un
terminal, ce1ta ins ports ont opt pour un systme de qu a is pub lics. C'est le cas du port de
Kobe au Japon qui est le suj et d'tude de N ishi mura, Imai et Papadimitri ou (200 1). Dans
cette tude, les auteurs dveloppent un modle qu i est rso lu l' aide d ' un algorithme
gntique pour optimiser l'allocation de quai aux navires dans un pmi o les quais so nt
publi cs. L'object if du modle dvelopp est de minim iser le temps de serv ice total. La
fo nn ulation du problme propose par les auteurs suppose les conditions suivantes : 1)
chaque navire doit tre amarr un seu l quai la fois . 2) le quai allou au navire doit
respecter les spcifications techniq ues de ce lui -ci (tail le, tirant d 'eau) 3) le temps de serv ice
de chaque navi re est dpendant du quai qui lui a t assign.
Le rsultat de cette formul ation est une programmation non li naire en nombres entiers, qui
peut difficilement tre rsolue l'aide de mthodes exactes. Nishimura et col. (2001) div isent
donc l' hori zon de planification en p lusieurs priodes qui sont considrs comme des sousproblmes
du
problme
gnra l.
Ensuite,
un
algorithme
gntique
est
appliq u
successivement chacun des sous-problmes, la solution du premier devenant le point de
dpart du second et ainsi de suite. Afin de valider l' heuristique dveloppe, des solutions
gnres par l'algoritlm1e gntique sont compares des dom1es historiques provenant du
port de Kobe. Les rsultats dmontrent que l'algorithme gntique a permis d'aniver un
39
temps de service similaire aux donnes historiques, mais en utilisant cinq quais au lieu de
sept.
2.2.2 L'allocation de grues de quai aux navires
La construction d' un horaire de travail des grues de quai consiste dterminer quelle grue
travaillera sur quel navire et sur quelle partie du navire en particulier. Donc, l' horaire de
travail d' une grue indique la squence de navires travaills, l' ordre dans lequel les cales
seront servies ainsi que la quantit et le type d' oprations effectuer.
Les intrants du processus de cration d'un horaire pour les grues de quai sont le plan de
chargement (stowage plan) du navire, la disponibilit des grues et un p lan qu i indique la
position sur le terminal des conteneurs charger sur le navire (Kim et Park 2004).
Le problme d ' all ocation de grues de quai aux navires vise dterminer une squence de
travai l des cales des navires qui permet de minimiser le temps d'opration total sur le navire.
La ralisation de ce plan de travail doit tenir compte du nombre de conteneurs
manutentionner, de la position des conteneurs, de l'impossibilit des grues de se croiser et
des poss ibilits d'interfrence entre les grues . En effet, la taill e des grues de quais ncess ite
de laisser une cale libre entre les grues afin d'viter un contact au cours des oprations. De
plus, la squence d'oprations doit tenir compte du nombre de conteneurs par ca les. Cette
considration est ncessaire afin d'viter qu ' une grue termine les oprations d' une cale et
qu'une autre grue cre de l' interfrence avec la cale suivante qui a t affecte la premire
grue.
Kim et Park (2004) ont dvelopp un modle pour le problme d'allocation de grues de quai
qui a pour objectif de dtem1iner la squence d' oprations des grues qui minimisera le temps
d'opration sur un navire. Le modle rsultant de cette formulation est une programmation
linaire entiers mixtes. Des tests utilisant un logiciel commercial de rsolution problmes
de programmation entire et linaire ont dmontr que les temps de calculs s'avrent trop
importants pour que le modle soit utilisable dans un contexte pratique.
40
Afin de remdier cette situation, Kim et Park (2004) proposent une heuristique pour la
rsolution du problme d ' allocation de grues de quais aux navires. L' heuristique de type
greedy randomized adaptative research procedure (GRASP) , utilise deux phases: la phase
de construction de solution et la phase d'amliorati on de la so lution. La premire utili se un
algorithme glouton pour obtenir une solution ralisable, tandis que la phase d 'amlioration
effectue des itrations en amliorant localement la solution construite dans la phase
prcdente.
Les itrations sont faites l'aide de la mthode 2-opt. Afin de valider
l' heuristique, des tests sont effectus sur des donnes empiriques et comparent cel le-ci une
mthode de rsolution exacte de type branch and bound . Les conclusions de ces tests sont
que la mthode exacte s'avre inefficace lorsque la taille du problme atteint 3 grues et 20
tches, puisque le nombre de nuds sur un mme niveau excde la limite d ' arrt de 175 000,
ce qui arrte l'algorithme une solution non optimale. De plus, les tests dmontrent que pour
une telle taille du problme, l'algorithme GRASP atteint des so lutions en utilisant des temps
de calculs moyens quivalents 3% du temps de calcul du branch and bound .
D l'impossibilit des grues de quai de se croiser, le prob lme d ' allocation de grues de quai
est parfois considr de faon simultane au problme cl 'allocation de quai. C'est le cas de
Park et Kim (2003), qui prsentent un modle d'allocation de quais et de dploiement de
grues de quai. Le problme est divi s en deux phases. La premire phase vise dterminer
quel moment le navire sera amarr, la position sur le qu ai qui lui sera ass igne, ain si que le
nombre de grues qui travailleront sur le navire. L ' objectif de cette phase est de minimiser le
cot de manutention des conteneurs, le cot de pnalit d ' une arriv diffrente elu TAE
(Temps d'Arrive Estim) et le cot de pnalit d ' un dlai au dpa1t du navire. Cette
premire phase est rsolue 1'aide de la mthode du sous-gradient (subgradienl oplimization
procedure).
En utilisant les d01mes de la premire phase, la seconde phase dtermine la squence
d ' oprations pour chacune des grues. L'objectif du modle reprsentant cette seconde phase
est de minimiser le nombre de dplacements des grues avant le dbut des oprations sur le
navire. Cette seconde phase est ensuite rsolue par une programmation dynamique.
41
Dans le but de dmontrer l'efficacit de la mthode, les auteurs l' utilisent en se basant sur la
situation du East Container Terminal du p01t de Pusan en Core. Ce tenninal utilise onze
grues sur un quai d'une longueur de 1 200 mtres. Pour la premire phase elu problme elu
problme, une heuristique est compare une mthode d'n umration complte. Les rsultats
sont que l' heuristique obtient des rsultats semblables la mthode d'numration, mais
beaucoup plus rapidement que celle-ci. Pour la seconde phase, la programmation dynamique
a permis d' obtenir des rsultats en une moyenne de cinq secondes, ce qui en fait une mthode
utilisable pour des applications pratiques. Les auteurs concluent qu'afin d' tre utili se dans
un contexte d'o prations, des heuristiques plus performantes doivent tre dveloppes pour la
premire phase du problme.
2.2.3 Planification du chargement
La planification du chargement consiste positionner les conteneurs sur le navtre. En
gnrale, une route de navire est constitue de plusieurs arrts clans diffrents ports et
chacun de ces atTts des conteneurs sont dchargs du navire et d' autres sont chargs. La
planification elu chargement consiste rpartir les conteneurs de ces cl iffrents arrts clans les
diverses cales du navire.
Le problme de la planification du chargement d' un navtre vise dvelopper un plan de
chargement qui minimise le nombre de manutentions improductives. Ces manutentions se
produisent lorsqu 'un conteneur, qui doit tre dcharg, se retrouve sous un conteneur qui doit
tre dcharg au port suivant. Par contre, le plan de chargement doit tenir compte de plusieurs
facteurs.
Tout d' abord, on retrouve les contraintes de stabilit du navire. En effet, le chargement du
navire doit tre rparti de manire ce que la stabilit du navire ne soit pas compromise.
L ' impact sur le plan de chargement est qu ' il peut s'avrer ncessaire de mlanger les
destinations dans une mme cale afin de respecter ces contraintes. Les contraintes de stabilit
sont troitement lies aux caractristiques des conteneurs. La principale caractristique
considrer est le poids des conteneurs. En effet, les conteneurs doivent tre chargs sur le
navire de faon ce que les plus pesants soient au fond du navire et les moins pesants sur le
42
dess us. Cet ordre est ncessaire afin de stabiliser le navire, ainsi que clans le but d'viter
qu 'un conteneur lourd crase un conteneur lger ou vide. De plus, le plan de chargement doit
tenir compte des contraintes qu ' imposent les conteneurs rfrigrs et les conteneurs de
matires dangereuses. Les premiers doivent tre chargs prs d ' une source de courant
lectrique, tandis que les seconds sont restreints certaines cales. Le problme de la
planification du chargement est aussi li au problme d ' all ocation de grues de quai aux
navires, puisque le plru1 doit tenir compte des possibilits d'interfrences entre les grues lors
des oprations sur les navires aux diffrents ports de la route de celu i-c i. W il so n et Roa ch
(1999) dcrivent le problme de la plru1ification du chargement d ' un p01te-conteneurs.
D ' ailleurs, ces auteurs proposent une mthode de rsolution pour le problme de la
planification du chargement qui combine un e mth ode exacte et un e mta-he uri stique. La
premire mthode utilise est un branch and bound dont l'objectif est d 'all ou des blocs
de conteneurs aux traves du navire (ship bay). La seco nd e mthode uti li se est une
recherche tabou qui vise positionner indiv iduell ement les contene urs 1' intrieur des
traves. Des discuss ions avec des gesti01maires et des pl anificate urs de terminau x permettent
aux auteurs d 'affirmer que les soluti ons obtenues sont comparables cell es obtenues par les
planificateurs .
2.2.4 Transport interne
Les dcisions stratgiqu es pour le transport interne du terminal portaient sur le type
d'quipement et d 'organi sation du terminal. Une fois ce choix fait, la planification tactique
consiste dterminer le nombre de vhicules qui seront utiliss pour le transport des
conteneurs entre le navire et la pile (V is 2005). En effet, elle consiste dterminer le nombre
de vhicules de manire assurer w1 droulement des oprations efficient. Les informations
ncessaires cette prise de dcision sont le nombre de transport qui doivent tre effectus, les
temps de manutention des conteneurs et les temps de transport des vhicules (Vis et col.
2001).
L'objectif du problme de gestion de la flotte de transpott interne du terminal consiste
minimiser le nombre de vhicules qui seront ncessaires aux oprations de transport entre le
43
navire et la pile. La dtermination du nombre de vhicu les est sujette un compromis entre la
minimisation des cots de transp01t des conteneurs entre les pi les et les grues et le niveau de
service aux grues. En effet, une augmentation du nombre cie vhicule a pour consquence de
dim inuer les risques cie dlais aux grues de quai elus l' absence de vhicu les, mais entrane
une augmentation des cots, tandis qu'une diminution elu nombre de vhicules utiliss aura
1'effet contraire.
Vis et col. (2001) utilisent un rseau flot maximal pour dterminer le nombre de vhicu les
guids automatiquement ncessaires pour excuter l'ensemble des tches de transport du
navire la pile et vice-versa. Le modle est rsout l'aide d' un algorithme de flot cot
mm1mum.
Koo et col. (2005) proposent un modle pour dterminer la tai ll e de la flotte de vhicules qui
se base sur la situation du pmt de Pusan en Core. Le volume de conteneurs qui transitent par
ce port est si important que des conteneurs doivent tre transports vers des terminaux
externes. Koo et col. (2005) pmient elu principe que la taille de la flotte dpend elu temps total
de hansport. Ce temps total de transp01t consiste la somme des temps de transpo1t charg,
des temps de chargement et de dchargement des vhicules et des temps de transpo1i vide.
Les trois premiers peuvent tre obtenus facilement lorsque la liste de transpo1t effectuer et
le temps de ces transports sont connus, mais les temps de transpo1i vide dpendent du
routage des vhicules. C'est pourquoi les auteurs haitent le problme de la tai lle de la flotte et
du routage des vhicules simultanment.
Dans un premier temps, Koo et col. (2005) utilisent le mod le propos par Maxwe ll et
Muckstadt (1982) pour fixer la borne infrieure la taille de la flotte de vhicules. La
fonction objectif de ce modle vise minimiser le temps total de trm1sports vide entre les
diffrents terminaux. Ainsi, une fois les temps de transport vide connus, le temps de
transport total peut tre calcul et divis par le nombre d' heures-vhicules disponibles, ce qui
pennet de fixer une taille de flotte minimale. Le rsultat obtenu est utilis comme borne
infrieure, puisque la modlisation ne tient pas compte des mouvements individuels des
vhicules, mais plutt des flux enhe les diffrents terminaux, ce qui rend la solution
44
difficilement app licable des situations relles. Dans un deuxime temps, une heuristique
utilisant une recherche tabou est utili se pour dterminer simultanment la taille de la flotte et
le routage des vhicul es. La solution de dpart utilise par l' heuri stique est la borne infri eure
pour la taille de la flotte et une so lution gnre par un algorithme glo uton pour le routage
des vhicul es. Des exprimentations comparant la recherche tabou avec une heuristique
utilisant un algorithme d' insetiion, pralablement dvelopp par les auteurs, et un algor ith me
glouton leurs permettent de conclure que la recherche tabou est plus efficace, pui squ 'e ll e
obtient des temps de transpoti total infrieurs, avec une flotte de vhicules moins importan te.
2.2.5 Planification de l'entteposage
La planification de l'entreposage conceme l'ensembl e des stratgies et mthodes qu i peuvent
tre utili ses pour dterminer de quelle faon les conteneurs seront tr is clans les diverses
piles l' intrieur elu tenninal.
De plus, la gestion des piles vise aussi minim iser les
mouve ments inutiles dan s la manutention des conteneu rs.
Chen (1999) propose une tude qualitative qui compare deux stratgies de gestion de l' es pace
et des mouvements dans un terminal. La premire stratgie, le pre-marshalling, cons iste
mettre les conteneurs reus pour l'exportation clans une zone temporaire, jusqu ' la rception
du plan de chargement de la ligne maritime. Une fois la liste reue, les conteneurs sont tris
selon le navire, le type de conteneur, la destination et le poids. Le principal avantage de cette
mthode est de simplifier la rception des conteneurs.
Par contre, le reman iement des
conteneurs avant l' arrive du nav ire impose une charge de travail importante, qui risque de
congestionner le terminal. La seconde stratgie, le sort and store est semb lable la premire,
mais le trie des conteneurs s'effectue la rception. Le principal avantage de cette mthode
est qu ' elle diminue la quantit de remaniement avant l' arrive du navire. Ces manutentions
peuvent tre effectues durant les priodes de baisse d'activits elu terminal, clone cette
stratgie diminue les risques de congestion 1'intri eur du terminal.
Cependant, cette
stratgie ncessite un espace impotiant afin de trier les conteneurs clans les diffrentes piles,
espace qui se fait de plus en plus rare dans la majorit des terminaux.
Au niveau de
l'impotiation, l'auteur propose de sparer les conteneurs du nouveau navire de ceux
dchargs des navires prcdents. De plus, l' auteur mentionne que la hauteur des piles est un
L_
45
facteur important cons idrer, puisque le nombre de manutentions improductives s'accrot
avec des piles plus leves.
propos des manutentions improductives, Kim (1997) prsente un modle dont le but est
d' valuer le nombre de manipulations sans valeur ajoute possibles selon la configuration de
la pile de conteneurs. Le modle est driv du modle ros (Index of selectiv ity) et cons iste
en une rgression linaire qui estime le nombre de manipulations. La rgression linaire
pennet un e estimation plus rapide et plus prcise qu e la mth ode ros.
Duinkerken, Evers et Ottjes (200 1) ont dvelopp une si mulati on visa nt mesurer
l'efficience de diverses stratgies de gestion des piles de conteneurs clans un terminal
automatis. Pour ce faire, quatre indicateurs de performance sont utili ss : le taux d' activ it
de la grue de quai (% de la priode de travail o la grue est active), la proportion de
remaniement de conteneurs pour l'exportation, le stack response move, qui correspond au
temps moyen que prend le pont roulant sur pneumatiques pour effectuer un cycle comp let et
le taux d'activit du pont roulant sur pneumatiques.
Deux mthodes diffrentes
d'empilement des conteneurs sont utilises afin de dterminer dan s que lle range les
conteneurs seront tris, la mthode alato ire et la mthode des ranges ddies, o des
ranges sont attribues chaque grues de quai. De plus, quatre stratgies diffrentes pour
l' empil ement des conteneurs sont si mules. Ces stratgies sont: l' alato ire, la stratgie de
nivellement, qui consiste rempl ir les ranges par tages, la stratgie de la hauteur minimale
de la pile la plus prs et le coefficient de capacit d' emp ilement restante.
La capacit
d'empilement restante pour une position dans la pi le se calcul e en so ustrayant la hauteur
actuelle de la pile la hauteur maximale de la pile et en multipliant cette somme par la
catgorie du conteneur sur le dessus de la pile. Les auteurs concluent que la hauteur de la
pile et le nombre de vhicules guids automatiquement sont les deux facteurs ayant la plus
grande influence sur la performance du systme. De plus, ils concluent que le fait d'affecter
des alles ddies cetiaines grues n ' avait pas une grande influence sur la perfonnance et
qu'en ralit la quantit d ' information ncessaire l' implantation de cette stratgie est trop
importante pour qu ' elle soit utilise efficacement.
46
2.3 La planification oprationnelle
Au niveau tactique, la capacit a t alloue aux tches effectuer de faon gnrale. L ' tape
suivante, la planification oprationnelle, vise la rpa1iition de cette capacit aux diffrentes
tches afin qu'elles soient ralises. Ces dcisions relvent tous de l'oprateur du terminal,
puisqu'elles concernent l'organisation de ses activits.
2.3.1 Ordonnancement des oprations de dchargement et de chargement
L'ordonnancement des oprations de dchargement et de chargement consiste dterminer
l'ordre dans lequel les conteneurs seront dchargs, dans le premier cas, et chargs, dans le
second cas. L'objectif du problme d' ordonnancement des oprations de dchargement et de
chargement est de dterminer la squence d'oprations qui permettra de minimiser le temps
quai du navire.
La majorit de la recherche s'est concentre sur le problme de l' ordonnancement des
oprations de chargement, puisque c' est celui-ci qui a le plus grand impact sur les cots de
manutention des conteneurs et sur le temps quai du navire.
La recherche sur le problme d' ord01mancement des oprations de chargement peut tre
divise en deux catgories. En effet, le problme peut viser le positionnement de chacun des
conteneurs individuellement ou 1'ordonnancement des opratio ns de cuei 1lette des conteneurs
dans la cour du terminal. Dans le premier cas, l'ordom1ancement demande une quantit
d'informations beaucoup plus importante, car il ncessite de com1atre la position exacte des
conteneurs sur le navire et dans la cour.
Dans le premier cas, o l' on vise le positionnement de chacun des conteneurs sur le navire,
l'objectif du problme est de minimiser le temps total d' opration de la grue de quai lors des
oprations de chargement. Cette minimisation du temps total se fera par une minimisation des
dplacements de la grue. Par contre, un compromis peut tre ncessaire si la squence de
chargement entrane un nombre trop important de manutentions improductives par les ponts
roulants sur pneumatiques. En effet, il se peut que l' ordonnancement obtenu ncessite des
47
conteneurs qui se retrouvent en dessous d 'autres qui viennent plus loin dans la squence. De
plus, l'ordonnancement des oprations de chargement doit se faire de manire respecter le
plan de chargement qui a t pralablement tab lie.
Kim et col. (2004) propose un algorithme utilisant une recherche par rayon (beam semch
algorithm) pour l'ordonnancement du chargement d ' un navire. L'a lgorithme procde en deux
tapes . Dans un premier temps, il ordonne des groupes de conteneurs aux caractristiques
similaires appels clusters . Dans un second temps, la squence de co nteneurs l' intrieur
de ceux-ci est ordonnance. Dans le but de mesurer son efficacit, l'algo rithme est compar
un e mta-heuristique de recherche dans le voisinage et un a lgorithme util isant le systme
des fourmis (anl system). Les conclusions des auteurs sont que l'a lgorithme dve lopp
obtient des sol utions plus prcises que la mta-heuristique, mais requiert des temp s des temps
de calculs plus longs. Par rapport l'algorithme utili sant un systme de fourmis, la so lution
propose obtient de meilleures solutions plus rapidement.
Dans les cas o l ' ordonnancement est fait pour l'ordre de cue illette des conteneurs dans la
cour du terminal, l'objectif ne sera pas le mme. Vu sous cette perspective, l'objectif est
maintenant de minimiser le temps total d ' opration pont roulant. Ce temps total est le temps
ncessaire pour transfrer les conteneurs charger, de la pile aux vhicules de transport
interne. Le temps total d 'exc ution dpend de la distance totale parcourue par la grue et du
nombre de changement de blocs de conteneur.
L'tude prcdente considrait le problme en cherchant pos itionner chaque conteneur de
faon individuelle. Kim et K im (1999), quant eux, considrent le problme pour
l'ordonnancement des oprations d' un pont roulant. La fonction objectif minimise le temps
de ralisation de l' ensemble des tches, qui dpend elu nombre de transfert entre les blocs et
de la distance totale parcourue. Dans une autre tude, les mmes auteurs (Kim et Kim 2003)
comparent une mthode exacte, une heuristiq ue avec recherche par rayons et l'algorithme
gntique dvelopp dans la premire tude (Kim et Kim 1999), pour le mme modle. Les
conclusions des auteurs sont que l'algorithme avec recherche par rayons est plus performant
que l'algoritlune gntique pour des probl mes dont la taille atteint 30 blocs de conteneurs
48
dans la cour du terminal. Pour ce type de problme, la mth ode exacte s'avre inefficace,
puisqu ' elle ncessite des temps de calculs trop longs.
2.3.2 Transport entre le quai et les piles
La planificati on des activits de transport entre le quai et les piles, au niveau oprationnel,
consiste dterminer quelle stratgie sera utilise pom affecter les vhicules aux tches de
transport. Il existe deux stratgies, soit: l'affectation d ' un groupe de vhi cu les une gru e ou
la mise en commun des vhicules qui peuvent ainsi servir toutes les grues sur tou s les nav ires.
L'avantage de la seconde stratgie est qu ' elle permet une meilleure utili sation des vhicules
puisqu ' elle diminue le nombre de dplacements sans chargement (Steenken et col. 2004). Par
contre, la coordination des vhicules et des grues est beauco up plus complexe, puisqu ' elle
doit tre effectue en temps rel, il est donc imposs ibl e d ' avoir un pl an d ' affectation prtablie (Crainic et Kim 2004). C ' est pourquoi en pratique la mise en commun des vhicu les
est seulement utilise dans les terminaux qui utilisent des vhicules de transpo1i automatiss,
tandis que les autres tem1inaux app liquent un e stratgie de vhi cules ddis, qu ' il s' agisse de
camions ou de chariots cavaliers (Steenken et col. 2004).
L'objectif du problme de transport entre le quai et les piles au niveau oprat ionnel est de
minimiser les temps de transport vide. Dans le cadre des oprations de chargement, les
transports vide se produisent gnralement lorsqu ' un conteneur a t livr la grue et que
le vhicule de transport interne doit retourner la pile pour reprendre un conteneur. Lors des
oprations de chargement, la situation est renverse . La mi se en commun des vhicules de
transport interne permet de minimiser les transpo1is vid e en affectant une tche de
transport du guai la pile un vhicule gui termine un e tche de tran spo1i de la pile au quai.
Le transpo1i vid e est limit la distance entre les deux navires. Le problme est donc
caractri s par un arbitrage entre les distances parcourues vide par les vh icules de transpoti
inteme et la complexit de gestion des oprations.
Bose, Reiners, Steenken et Voss (2000) traitent du problme de dploiement des chariots
cavaliers dans un tenninal spcialis dans la manutention de conteneurs. Plus prcisment,
ils ont utilis un algorithme gntique sur des donnes provenant du terminal Burchardkai
49
du port de Hambourg.
En prem1er lieu, les auteurs comparent trois stratgies de
dploiement: statique, semi-dynamique et dynamique. La premire consiste all ouer des
chariots cavaliers une grue de quai seulement. La seconde consiste permettre aux chariots
cavaliers allous un navire de servir toutes les grues de quai affectes ce navire. La
dernire stratgie consiste permettre tous les chariots cavaliers de servir toutes les grues.
Avant mme d'appliquer l'algorithme au problme, les rsultats de tests sa ns opt imisation du
dploiement permettent aux auteurs de conclure que la dernire stratgie permet de diminuer
les dlais, donc d'augmenter la performance du termin!!. L' algorithme gntique est ensuite
utilis sur les rsultats des stratgies sem i-dynamique et dynamique. Les rsultats obtenu
dmontrent un dploiement permettant de diminuer les temps morts (dlais) pour les deux
stratgies. Par contre, les auteurs concluent que 1'algorithme dev ra tre uti 1is dans un e
simulation tenant compte d' influences stochastiqu es afin de valider les rsultats obtenus. E n
effet, dans l'application actuelle, les temps de cycles des grues sont assum s constants et la
capacit de la zone tampon clans 1'empattement de la grue de quai est considre comme
infinie. De plus, l'ensemble des oprations lies 1' empilement des conteneurs dans la cour
est prsum comme fixe et les locations connues.
Duinkerken, Ev ers et Ottjes 2002 ont dvelopp une simulation dont 1'objectif est de mesu rer
la performance de deux mthodes d' organisation du trafic dans un tenni nal maritime
automatis de conteneur.
Les deux mthodes compares sont 1) circul atio n en boucl es
(circulation layout) 2) circulation croise (crossover layout). La circulation en boucles est
sembl able aux mthodes actuellement utilises, puisqu ' el le cons iste faire longer les
vhicules le long du navire pour ensuite les diriger vers la pile et les rediri ger vers le nav ire
sans qu 'aucun chemins ne se croisent. Dans le cas de la circulation croise, les vhicules
peuvent passer directement de la pile la grue de quai sans avo ir longer le navire. L'tude
mesure donc la performance des deux mthodes d' organisation, en utilisant comme mesure
de performance l' occupation de la grue de quai, soit le pourcentage de temps o la grue est
active, le ratio d'erreur de chargement, le rapport entre le nombre de conteneurs chargs selon
la mauvaise squence et le nombre total de conteneurs chargs, et le nombre de vhicules
guids automatiquement utiliss. La simulation effectue des analyses en variant le nombre de
vhicules et la vitesse de ceux-ci pour mesurer l' impact de ces variations sur la performance
50
du systme. Les conclusions sont que la circulation croise permet de diminuer le nombre de
vhicu les utiliss par rapport la circulation en boucles.
2.3.3 Dploiement des quipements de manutention de la cour
Les problmes de gestion de l'quipement sont cruciaux pour les terminaux maritimes, clue
aux sommes d'argent impmtantes investies dans ces quipements .
C' est pourquoi les
terminaux cherchent optimiser 1' utilisation de ces quipements pour en tirer la meilleure
utilisation possible.
Le problme de dploiement des quipements de manutention de la cour vise minimiser le
temps total d'oprations de ces quipements. Le temps d'oprations est au ss i dpendant des
temps des mises en routes ncessaires une squence d'oprations. Un temps de mise en
route survient lorsque l'quipement doit se dplacer d 'une tche l'autre. Par exemple,
lorsqu'un pont rou lant sur pneumatiques doit changer de bloc de conteneurs. De plus, le
temps total dpend aussi du nombre de remaniement de conteneurs qui devront tre effectus
au co urs de la squence d' oprations, puisque ces remaniements prolongent le temps
d'extraction d' un conteneur de la pi le.
Il existe aussi un lien entre le nombre de remaniements et les temps de mise en route des
quipements. En effet, si le dploiement des quipements est fait en considrant seulement
les temps de mise en route, la squence risque de comporter plusieurs remaniements pour
extraire l'ensemble des conteneurs d'un bloc avant d'effectuer un dplacement vers un autre
bloc.
ce sujet, Linn et col. (2003) prsentent un algorithme qui vise optimiser le dploiement
des ponts roulants sur pneumatiques clans un terminal maritime de manutention de
conteneurs, clans le but de minimiser le temps quai des navires porte-conteneurs.
La
premire tape de l'algorithme limine certaines situations de clpatt qui ne peuvent pas tre
changes durant la priode d'activit (ex: blocs o les 2 grues sont occups 100%) afin
d'allger les calculs, qui doivent tre fait pour chaque priodes de quatre heures. Ensuite,
une quation mathmatique base sur un problme de programmation entiers mixtes vise
51
minimiser les surcharges de travail clans les blocs o celles-ci existent. Les cloJmes utilises
pour tester 1'algorithme proviennent elu terminal Modern Tenninal Limitecl, un tenninal
important elu port de Hong Kong. Les conclusions des auteurs sont qu e l'o ptimisation des
oprations de dploiement des ponts roulants sur pneumatiques dans un terminal contribue
diminuer le temps quai des navires. Par contre, ils ajoutent que le modle ne tient pas
compte de la possibilit de dploiements multipl es dan s un bloc de quatre heures, le mod le
se limitant un seul dploiement tous les quatre heures.
Gambardella, Rizzoli et Zaffalon (1998) utilisent une combinaison d' optimisation et de
simulation pour traiter le problme du dploiement des quipements de la cour. Les auteurs
partent du principe que les so lutions gnres par l' outil d' optimisation ne peuvent tenir
compte de la nature stochastique des oprations du terminal. C'est pourquoi les solutions
obtenues sont valides par une simulation .
Dans un premier temps, les auteurs modlisent le problme comme un prob lme de design de
rseau. En effet, dans le cadre des oprations de chargement les sources du flot sont les
diffrentes piles de conteneurs et la destination du flot est Je navire . Pour ce qui est du
dchargement, la source et la destination du flot so nt inverses. Le flot dans Je rseau circule
en passant par des nuds qui reprsentent les grues de quai. Les arcs reliant les piles aux
grues de qu ai ont une capacit qui dpend des ressources qui ont t all o ues. La
modlisation selon un prob lme de design de rseau en fait donc un problme de
programmation linaire entiers mixtes. Afin de rsoudre le modle, un e mthode exacte
utilisant un branch and bound est utili se. Bien que ce type de problmes ncessite
gnralement des temps de calculs impm1ants, les auteurs affirment que, dans ce cas
pa1ticulier, la taille limite du problme permet d' obtenir de bonnes so lutions en quelques
minutes.
Dans un deuxime temps, le dploiement obtenu est utilis par une simulation orient objet
qui reprsente, dans le cas prsent, les oprations d'un terminal du port de La Spezia en Italie.
La simulation est base sur une hirarchisation des agents sur trois niveaux, soit les
planificateurs, les oprateurs et les composants . Les premiers, qui incluent l' agent
52
responsable de la planification de la cour et l'agent responsable de la planification des
navires, sont les entits qui utilisent le modle d'optimisation pralablement prsent. Les
oprateurs, qui comprennent les ponts roulants sur pneumatiques, les grues de quai et les
vhicules de transport interne, se situent au niveau intermdiaire, puisqu'ils sont en mesure
d'viter des conflits locaux comme l' utilisation d'un mme espace pour dposer un conteneur
par deux ponts roulants . Les composants, quant eux, se situent au dernier niveau
hirarchique et ne possdent pas d'intelligence . Les composants comprennent les conteneurs,
les piles de la cour, les navires, les trains et les camions externes. noter que les tro is
derniers ne possdent pas d'intelligence puisqu'ils sont considrs comme externes, donc
hors du contrle du terminal. La simulation repose sur le principe que les vnements
externes gnrent des rponses des agents, qui agissent ensuite sur les composants. Par
exemple, l'anive d'un navire gnrera un plan de dploiement qui sera utilis pour la
simulation des oprations du terminal.
Suite des tests sur des donnes provenant du pmi de La Spezia, Gambardella et col. ( 1998)
concluent que l' outil peut tre utilis comme systme d'aide la dcision, mais qu'afin d' tre
plus efficace un modle d'optimisation de l'ordonnancement des oprations devra tre ajo ut
aux agents planificateurs.
2.3.4 Ordonnancement de l'entreposage
L'objectif du problme d'ordotmancement de l' entreposage est d'affecter une position aux
conteneurs dans la zone de stockage du terminal de manire minimiser les remaniements de
conteneurs lors des oprations de chargement. Bien que ces remaniements puissent se faire
avant l' arrive du navire, le problme demeure le mme, puisque ces remaniements occupent
le temps d'quipements qui pourraient tre affects d' autres tches plus productives.
Kim et Bae (1998) ont trait les problmes de remaniement des conteneurs en expmiation
avant l' arrive du navire.
Le remaniement cons iste placer les conteneurs en ordre de
chargement dans les piles, afin d' viter les pertes de temps durant le chargement. Les auteurs
cherchent minimiser le nombre de conteneurs manutentionner. Pour ce faire , le problme
est dcompos en trois sous-problmes : 1' allocation de traves (yard bays), la dtermination
53
des manutentions effectuer et 1'ordonnancement des tches.
Les deux prem1ers sous-
problmes sont rso lus simultanment en utilisant la programmation dynamique et
l'algorithme du problme de transport. Ensuite, Je troisime sous-problme est dfini comme
un prob lme du voyageur de commerce avec contrainte de prcdence sous forme de
contrainte satisfaire. En conclusion, les auteurs constatent que la rsolution du problme
est longue et que des mthodes heuristiques plus efficaces doivent tre dveloppes afin d'en
acclrer la rsolution.
Preston et Kozan (200 1) ont, quant eux, dvelopp un algorithme gntique dont le but est
de minimiser le temps quai des navires porte-conteneurs. L'hypothse de base du mod le
est qu ' en minimisant le temps d' utilisation moyen de l'quipement du terminal, on minimise
le temps quai des navires. Donc, une situation idale serait que chaque machine travaille le
mme nombre d' heures ce qui ferait que la charge de travail serait rpartie entre les diffrents
quipements du terminal, ainsi le temps quai du navire serait min imis. C'est pourquoi les
auteurs ont dvelopp un modle de localisation des conteneurs qui vise minimiser les
manutentions improductives dans le but de minimiser le temps de travail des quipements.
C'est ce modle qui est rsolue l'aide de l' algorithme gntique. Finalement, les auteurs
testent et valident l'algorithme l'aide d'une simulation qui utilise la mthode dveloppe
avec les heuristiques pour l'ordre de chargement des conteneurs sur le navire du PEPS
(premier entre, premier sortie) et elu DEPS (dernier entre, premier sortie) ainsi qu ' une rgle
alatoire. Pour chacune des rgles, 100 essais sont effectus. Les meilleurs rsultats pour
chaque heuristiques sont compars et sont tous trs similaires, ce qui pousse les auteurs
croire que l 'algorithme dvelopp est efficace, peu impolie l'heuristique utili se .
2.4 Planification en temps rel
Le dernier niveau de planification des oprations est la planification en temps rel. Au niveau
prcdent, la planification oprationnelle, les tches effectuer taient alloues aux
ressources du terminal. La planification en temps rel vise maintenant dtenniner la
meilleure faon de raliser cette tche. Ces dcisions se font des intervalles de temps trs
comis dus la nature dynamique des oprations d 'un tenninal maritime de conteneurs, qui ne
permet pas une planification long terme.
54
2.4.1 Routage des vhicules de transport automatis
Les problmes de routage des vhicules de transport automatis consistent affecter les
vhicu les de transpott interne aux tches de transp01t effectuer, de manire minimiser la
distance totale parcourue par les vhicules. La distance totale dpend des transports vide,
des routes affectes aux vhicules et de la congestion du terminal.
Grunow, Gnther et Lelm1arm (2004) proposent un modle de programmation linaire
entier multiple qui a pour objectif d'optimiser le dploiement de vhicu les guids
automatiquement. La particularit de la mthode est le fait qu ' elle considre la partialit de
chargement des vhicules (un seul EV P charg sur une capacit de deux EVP), ce qui en fait
une mthode de dploiement event driven donc offrant une meilleure possibilit
d'adaptation aux changements en temps rel.
Par contre, une faiblesse du modle est sa
myopie. On elit de ce modle qu'il est myope, car les dcisions qu ' il prend sont bases sur
les vhicu les, donc que celui-ci considre les tches effectuer par rapport un vhicu le
disponible et non l'ensemb le des vhicules par rapport l' ensemb le des tches. De plus, les
temps de calculs de l' algorithme par un ordinateur sont lon gs, ce qui rend le systme
difficilement utilisable dans un environnement rel.
L im et col. (2003) proposent, quant eux, un algorithme bas sur un concept de march.
Dans ce type d'algorithme, les tches accomplir (transp01t de A B) sont des acheteurs et
les vhicules sont des vendeurs qui cherchent max imiser leur profit. L ' assignation d'une
tche se fera lorsque le profit sera maximis, donc que 1' cmt entre le cot et le prix d ' un
transport sera le plus grand pour un vhicule, les tches cherchant quant elles les vhicules
ayant le cot d ' opp01tunit le plus bas. L'avantage de cette mthode est qu ' elle corrige la
myopie des mthodes bases sur les vhicules ou bases sur les tches, puisqu'elle considre
l' ensemble des tches par rapport l'ensemble des vhicules.
En effet, un vhicule
nouvellement libr d ' une tche soumet une offre la tche lui offrant la marge maximale,
celle-ci envoie un avis d'annulation au vhicule qui lui tait prcdemment assign si la
nouvelle offre possde un cot d' opportunit plus bas. Par contre, de l'aveu des auteurs eux-
55
mmes, l'algorithme est difficilement applicable une situati on relle pui squ ' il ncessite des
temps de calculs encore trop lon gs .
Bish et col. (200 1) proposent une heuristique en deux tapes pour le routage des vhicules de
transport inteme du terminal.
Selon eux, la taille des terminaux et la complexit des
oprations rend le dveloppement d'un modle complet pratiquement impossible.
C'est
pourquoi ils dcomposent le prob lme en plusieurs sous-problmes, soit 1'allocation de
vhicules aux contenems dchargs, l'assignation d' un emplacement dan s le terminal ces
conteneurs et la circulation des vh icules dans le terminal. L'algorithme dve lopp vise les
deux premiers problmes.
Le principe de l' heuri stique est d'assigner une location aux
conteneurs en minimisant la distance totale parcourue entre les locations et le nav ire; pour,
ensuite, utiliser un algorithme glouton pour l' allocation des vhicules aux tches de transport.
Les auteurs concluent qu ' il est possible de dvelopper des heuristiques efficaces bien que le
problme soit compliqu. Par contre, d' autres recherches sont ncessaires afin de rendre le
modle plus raliste.
Evers et Koppers (1996) prsentent une mthode de gestion du trafic des vhicu les gu ids
automatiquement de type dcentralis (distributed traffic control). Ce type de gestion du
trafic se fait via le dcoupage du terminal en plusie urs secteurs, chaque secteur ayant une
forme d ' intelligence qui lu i permet de grer le trafic. Le modle est bas sur 4 types d ' entit,
soit: les noeuds, les liens, les semaphore et les secteurs. Les liens reprsentent les divers
chemins sur le tenninal, les noeuds reprsentent les intersections et oprations, les
semaphore servent contrler l'accs divers endroits sur le tenninal afin de rgulari ser
le trafic de la mme manire que le fait un feu de circulation, ce sont donc ces entits qui
possdent l'intelligence. Des rgles de priorit sont donnes aux semaphore pour grer le
flot de vhicules. Les auteurs testent leur modle l' aide d' un e simulation et conc luent que
ce systme, par sa dcentralisation, diminue la quantit de communi cations ncessaires,
puisque les vhicules envoient les informations sur leur position un niveau local seulement.
De plus, ils concluent aussi que leur systme augmentera la capacit du terminal, car il
permet plusieurs vhicules de circuler au mme moment travers les noeuds ou sur les
chemins entre les noeuds . Par contre, les rsultats de la simulation ne peuvent tre utiliss
56
pour prdire la perfonnance elu terminal, puisqu ' ils ne tiennent pas compte des dlais la
pile.
2.5 Systmes intelligents dans les ports
Bien que les sections prcdentes du chapitre prsentent des modles et simulations qu1
peuvent constituer la base de systmes de transport intelligents, ceux-ci peuvent prendre
d'autres formes. Cette section prsente diverses contributions aux systmes de transport
intelligents provenant d'autres domaines que la recherche oprationnelle et aussi des
systmes d ' aide la dcision en cours de dveloppement Les sujets sont regroups dans les
catgories suivantes : suivi du cargo et de
1' quipement,
gestion
des terminaux,
communication et changes de donnes et systmes d ' aide la dcision.
2.5.1 Suivi du cargo et de l'quipement
Les systmes de suivi du cargo combinent l' utilisation d ' quipement de collecte de donnes
et de logiciels de traitement de ces donnes afin d ' offrir un su ivi en temps rel des oprations
de transport.
Drr et Giannopoulos (2003) proposent le systme SITS (Simple Intermoda l Tracking and
Tracing System).
SITS utilise des documents XML (eXtended Markup Language) pour
agrger l' infonnation sur le statut de la marchandise transporte, information provenant de
sources multiples.
Les utilisateurs peuvent accder au systme via Internet et suivre le
cheminement de leur marchandise travers la chane de transport intermodal. L ' accs
l'information est scuris par une identification avec mot de passe qui donne accs un
tableau de bord contenant les donnes sur la marchandise de l' utili sateur.
Une revue des diffrentes technologies de l' information et des communications appliques au
domaine du transpmi est prsente par Giannopoulos (2004). Les teclmologies utilises et en
voie de dveloppement pour les divers modes de transpo1i ainsi que pour le transpoii
intem1odal sont prsentes ainsi qu ' une ouverture sur les dveloppements pour la dcennie
venir.
57
2.5.2 Gestion des terminaux
La gestion des terminaux maritimes de conteneurs est aujourd'hui suppmte par divers
systmes d' informations . Parmi ceux-ci, le principal est le systme d'opration du terminal.
Celui-ci constitue le systme transactionnel utilis pour l'ensemble des processus
administratifs qui supportent les processus oprationnels du terminal. L'information sur ces
systmes provient de deux sources: les sites web commerciaux d'entreprises qui distribuent
des produits existants et la littrature scientifique qui prsente des systmes en
dveloppement ou en phase conceptuelle. Dans Je premier cas, les rfrences incluent les
compagnies Nav is (http: //www.navis.com/) et Cosmos (http://www.cosmosworldw ide.com/).
Le systme Navis repose sur une suite de modules qui peuvent tre ajouts au systme
d' opration du terminal nomm Sparcs. Les modul es supplmentaires sont ExpertDecking,
AutoStow, Quay Commander et Prime Route. Le premier est un systme d' allocation de
position aux conteneurs dans les piles de la zone de stockage du terminal. Le seco nd est un
logiciel de planification du chargement des nav ires. Le troisime effectue 1' all ocation de
grues de quai aux navires et permet de suivre en temps rel l'tat des oprations sur les
navires. Finalement, le module Prime route effectue l'al location des tches aux qu ipements
du terminal. Bien que le systme Navis permet l'uti li sation d'autres logic iels avec le systme
d' opration du terminal Spores , l' utilisation des modules avec un systme d'opration autre
n'est pas possible.
En ce qui concerne le systme Cosmos, il est compos de six modules. Ceux-ci peuvent tre
intgrs entre eux ou avec d'autres systmes existants. Le cur du systme, qui constitue le
systme d'opration du tenninal, se nomme CTCS (Contain er terminal control .system).
S'ajoute celui-ci, le module Ships, pour la planification du chargement et l'allocation de
grues aux navires, le module Space, pour la planification de la cour, le module Traffic, pour
l'allocation des tahes aux quipements, le module Visual Gate System , pour l'automatisation
de la gurite et le moduleE-Terminal, pour la mise en ligne d' infonnations oprationnelles
sur le terminal. Le but de ce systme, comme clans le cas de Navis, est d'informatiser, voir
d'automatiser la prise de ce1taines dcisions tactiques et oprationnelles dans les terminaux
portuaires de conteneurs.
58
Le pmi de Sin gapour fait figure de pionnier dans le domaine de l' utilisation des systmes
d' infor mat ions pour la gestion des oprations portuaires. En effet, le poli, qui rivalise avec
Hong Kong pour la premire place mondiale dans le domaine du conteneur, a t parmi les
premiers ports informatiser ses oprations. ce suj et, Wan et col. ( 1992) prsentent les
diffrents systmes dvelopps par le p01i de Singapou r au dbut des annes 90 et les
avantages comptitifs qui dcoul ent de ces systmes. Les deux principaux systmes
dvelopps se nomm ent PORTNET et CITOS . Dans Je premier cas, il s'agit d' Lm systme de
commerce lectron ique comp let qui permet l' informatisation des processus depuis la
rservation d ' un transport de conteneur, jusqu' la facturation du serv ice. PORTNET inclut
aussi les relati ons avec les organismes gouvemementaux. Dan s le second cas, CJTOS est un
systme d'opration du terminal au mme titre que les systmes proposs par
av is et
Cosmos. Les fonctiom1alits du premier sont semblables celles des seconds.
Lee-Pmiridge et col. (2000) dressent un pOlirait plu s rcent des systmes d ' information du
p01i de Singapour, avec une emphase sur les facteurs qui ont contr ibu a u succs de ces
systmes, tant dans le dveloppement que dans la mise en place. Les conclu sions des auteurs
sont que, bien que les considrations techniques aient eu un rle imporiant dans le succs des
systmes d 'infonnati ons, les considrations organisationnelles semblent avoir eu un impact
important. En effet, les auteurs identifient les facteurs de succs managriaux qui ont t mis
en place au pOli de Singapour. Ces facteurs sont: 1) des investissements en systmes
d ' information orients vers une perspective d ' affaire 2) l'ali gnement elu plan stratgique et elu
plan de dveloppement des systmes d ' information 3) maintenir une structure de systmes
d'information flexible et extensible 4) encourager la crativit et 1' innovation en systmes
d' information .
En ce qui a trait aux formes conceptuelles, elles visent principalement l' arrimage des
technologies de collectes de d01mes avec des systmes d ' oprations du tem1inal. Panni
celles-ci, Bozzo et col. (2001) prsentent le systme MOCONT, qui permettrait d 'a utomatiser
les processus d'identification et de localisation des conteneurs. En effet, l'utilisation d ' un
satellite et d ' un systme de navigation inerte permet de positionner en temps rel les
59
conteneurs sur le terminal. De plus, des camras installes sur les quipements de
manutention et lies un logiciel de reconnaissance optique des caractres permettent
d' automatiser l' identification des conteneurs . Le principal avantage de ce systme serait
d'avoir une vis ion en temps rel du positionnement des conteneurs, donc d'tre en mesure de
suivre les dplacements de ceux-ci en tout temps. Cette vision en temps rel permettrait
d' obtenir une information optimale pour la prise de dcision .
2.5.3 Communication et change de donnes
Garstone (1995 ) prsente les avantages de l' utilisation de l' change de donnes informatises
(EDI) dans les changes entre les pmts et leurs diffrents partenaires.
Bien que la communication avec les partenaires externes so it importante, elle doit tre
complte par une communication et des flux infonnationnels internes. Kia et col. (2000)
dmontrent l' impmtance de ceux-ci par une simulation qui co mpare un p01t utili sant des
systmes intelligents un port qui n'en utilise pas. Les techno logies utili ses dans le pmt
simul sont : 1' identification des conteneurs par micro-o nd es, la lecture optique de cocles
barres et la reconnaissance lectronique de la voix. Les donnes la base de la simulation
proviennent d'observations effectues dans des ports de la cte Ouest des Etats-Uni s (Los
Angeles, Long Beach) et au port de Melbourne en Australie.
Les conclus ions sont que
1' introduction des technologies dans les ports augmente l'efficacit de ceux-ci en diminuant
le temps quai des nav ires, donc les cots lis cette priode d' inactivit, en diminuant les
heures de salaire payer et en rduisant le taux d'occupation de la surface d'empilement des
conteneurs.
2.5.4 Systmes d'aide la dcision
Tel que mentionn auparavant, diverses tudes prsentes prcdemment peuvent servir de
base pour le dveloppement de systmes de transpmt intelligents dans les terminaux de
conteneurs. Par contre, l'obj ectif premier de celles-ci n' tait pas de constituer un systmes
d'aide la dcision oprationnel, ce que proposent les auteurs suivants.
60
Murty et col. (2005) proposent une base pour un systme d'aide la dcision pour la gestion
des oprations quotidiennes d'un terminal. Les auteurs prsentent les modles et les
algorithmes utiliss pour le dveloppement du systme. Le systme repose sur neuf dcisions
principales: 1) l'allocation de quais aux navires 2) l'allocation de grues de quai aux navires
3) la distribution des rendez-vous pour les camions externes 4) le routage des camions
l'intrieur du terminal (camions internes et externes) 5) la politique de dploiement la
gurite du tenninal et aux quais 6) l'assignation d' un espace d'entreposage 7) le dp loiement
des ponts roulants sur pneumatique 8) l'allocation des camions intemes aux grues de quai 9)
dtermination du nombre optimal de camions intemes. Par contre, le systme n'est pas encore
oprationnel et les auteurs poursuivent le dve loppement.
De leur ct, Henesy et Tornquist (2004) utilisent plutt une simulation plusieurs agents
(mu/ti-agents simulation) pour dvelopper un systme d' aide la dcision. L'architecture de
la simulation est la suivante : un agent est responsable de la gurite, un autre est responsa ble
de la planification du terminal et un agent est respon sable de la planification du chargement
des navires. Aux agents prcdemment mentionns, s'ajoutent les agents reprsentant les
divers modes de transp01t qui interagissent avec le terminal. L'interaction entre l'ensemble de
ces agents permet de rgulariser les flux internes du terminal en favorisant les changes
l'intrieur du terminal. Par contre, le systme d'aide la dcision dvelopp dan s cette tude
n'est pas fonctionnel puisqu ' il est encore la phase de conception.
2.6 Conclusion
Tel qu ' il a pu tre constat dans ce chapitre, la planification et la gestion des terminaux
maritimes de conteneurs impliquent la prise de nombreuses dci sions complexes. De plus, la
revue de littrature associe chacun de ces problmes a prsent divers outils pour traiter
ces problmes. Cependant, avant de traiter l' une ou 1' autre de ces problmatiques, il importe
de bien comprendre le fonctionnement d'un terminal maritime de conteneurs. C'est pourquoi
le chapitre suivant prsente les diffrents processus oprati01mels d'un tenninal maritime de
conteneurs.
CHAPITRE III
PROCESSUS D 'UN TERMINAL MARITIME DE CONTENEURS
Ce chapitre prsente les principaux processus d' un terminal de conteneurs. Les processus
sont regroups selon les diffrentes zones d'oprations du tem1inal qui ont t pralablement
prsentes . La section 3.1 prsente les processus de la zone d'oprations portuaires du
tem1inal. Une description des processus de la zone d' oprations terrestres est disponible la
section 3.2. La section 3.3 prsente les processus de la zone de stockage du terminal, tandis
gue la section 3.4 prsente les flux d' informations ncessaires la gestion d'un termina l
maritime de conteneurs. Il est important de noter gue les sections 3.1 3.3 prsentent les
processus impliquant un mouvement physique des conteneurs, donc qu ' il s ne comprenn ent
pas les diffrentes phases de planification pralables chacun de ceux-c i, qui ont t
prsentes dans le chapitre prcdent.
Les descriptions des processus prsentes dans ce chap itre assument un term in al qui utilise
un systme de transfert indirect utilisant des ponts roulants sur pneumatiques po ur le stockage
des conteneurs dans les piles. Cette configuration a t retenue, puisqu'il s'agit de la plus
rpandue et qu 'elle est utilise clans la majorit des terminaux de la cte Est canadienne qui
ont t visits dans le cadre de cette tude . De plus, le terme transmetteur de donnes sera
utili s pour l'ensemble des descriptions de processus. Ce terme sera utilis pour rep rsenter
l' ensemble des technologies gui peuvent tre utilise pour la transmission de don nes entre Je
systme d'opration du tenninal et des terminaux informatiques manuels. En effet, plusieurs
modes de transfe1t des dmmes existent. Parmi ceux-ci on retrouve notamment l' utilisation de
satellites basse orbite, les transferts de donn es radios, les lecteurs optiques de cocles
barres et les puces RFID actives et passives.
Les symboles utiliss pom reprsenter les diffrents types d'activits dans les diagrammes de
processus sont prsents clans la figure 3 .1.
62
0
D
Opration
Contrle
Stockage
D
D
Dcision
Opra tion et
contrle simulta n
Processus
Figure 3.1 Signification des symboles utiliss dans les diagrammes de processus.
3.1 Processus de la zone d'oprations portuaire du terminal
La zone d'oprations portuaires du terminal est la section du terminal o sont effectues les
oprations de chargement et de dchargement des navires et des barges.
3.1.1 Processus de dchargement des navires
La premire tape du processus de dchargement est la prise du conteneur par la grue de quai.
Une fois le conteneur saisi, la grue le transporte de la cale du navire au quai o il est dpos
sur un vhicule de transport interne. Pendant le transfert, un vrificateur situ dans une patte
de la grue saisit Je numro du conteneur dans un transmetteur de donnes. Ainsi, le numro
du conteneur est transmis au systme d'opration du terminal qui associe le numro du
conteneur aux informations qui le concerne. Ensuite, la position qui a t assigne au
conteneur apparat l' cran du transmetteur de donnes. Le vrificateur indique ensuite la
position assigne l' oprateur du vhicule de transport interne.
Si le conteneur n' a pas tre inspect, il est transport jusqu ' la pile, o un pont roulant sur
pneumatiques dcharge le camion et dpose le conteneur dans la pile. Une fois qu ' il est
dpos dans la pile, un vrificateur saisit le numro du conteneur dans un transmetteur de
donnes radios et valide ou corrige la position de celui-ci. Le conteneur restera dans la pile
jusqu' ce qu ' un autre processus dbute et qu ' il soit ncessaire de manutentionner Je
conteneur.
63
Par contre, si le conteneur ncessite une inspection, le processus sera diffrent. Suite au
dchargement du conteneur du navire, le camion le transpo1te jusqu ' la zone d'inspection
des douanes. Une fois rendu , le camion est dcharg et le conteneur est dpo s sur le so l.
Ensuite, deux types d'inspection peuvent tre effectus: non intrusives et intrusives (Lewis et
al. 2003 ).
Dans le premier cas, des teclmologies comme les rayons x, les rayons gamm a et les
dtecteurs de radiations sont utili ses pour inspecter le co nten u du conteneur. Une fois
l' inspection complte, il y a deux cheminements possibles pour le conteneur. Si aucu ne
inspection supplmentaire n'est ncessaire, il est charg sur un vhicule de transport in terne
et le processus prcdemment prsent reprend.
Cependant, il se peut qu ' une inspection suppl mentaire so it ncessaire. Dans ce cas, les
agents des douanes procdent une inspection intrusive. Dans ce type d' inspection , le
conteneur est ouve1t afin d'en inspecter le contenu. Par la suite, si le contenu est jug lgal, le
conteneur est charg sur un vhicule de transpmt interne et le processus de dchargement
reprend. Par contre, si le contenu est jug illgal, le conteneur est saisi. Il est impmtant de
noter que des inspections intrusives peuvent tre effectues sans qu ' il y ait d ' inspection non
intrusive au pralable. La figure 3.2 illustre le processus de dchargement des conteneurs.
Suite aux vnements du 11 septembre 200 1, la scurit dans les terminaux de conteneurs est
devenue une proccupation beaucoup plus importante. Certaines des modifications apportes
la rglementation canadienne pourraient avoir un impact important sur les oprations des
tem1inaux de conteneurs . En effet, il sera prochainement obligato ire pour les oprateurs
canadiens de terminaux portuaires de faire passer tous les conteneurs par un dtecteur de
radiations. Dans les cas o des conteneu rs afficheront un niveau de radiations trop lev, le
conteneur devra tre laiss sur le navire et retourn son point d'origine. Cette mesure vise
prvenir l'introduction de bombes sales par conteneurs.
64
Figure 3.2 Processus de dchargement des conteneurs.
3.1.2 Processus de chargement des conteneurs
Le chargement de conteneurs sur un navire constitue gnralement le processus suivant celui
de dchargement. En effet, une fois le dchargement des conteneurs imports complt, le
cargo exporter est charg sur le porte-conteneurs.
Avant que commence le chargement des navires, les planificateurs des oprations du terminal
ont tabli le plan de chargement et l' ordonnancement des oprations de chargement. Ainsi,
une squence de conteneurs, charger, a t tablie pour les diverses cales du navire.
Puisqu'elle est tablie l'aide du systme d ' opration du terminal, celui-ci contient la
squence.
Le chargement du navire dbute la pile o les conteneurs sont regroups en bloc. Le
systme d'oprations du terminal envoie les instructions de chargement un vrificateur situ
prs de la pile, l' oprateur du vhicule de transport interne et l' oprateur du pont roulant
sur pneumatiques. Une fois les instructions reues, le pont roulant prend le conteneur et le
dpose sur le vhicule de transport interne. Par contre, il se peut que le conteneur ne soit pas
accessible, car situ sous un autre. Dans ces cas, des manutentions de conteneurs
supplmentaires sont ncessaires pour dgager le conteneur dsir.
65
Une fois Je conteneur transfr sur Je vhicule de transport interne, ce dernier se dirige vers la
grue laquelle il est assign et se place dans la file d' attente pour tre dcharg par la grue de
quai . Celle-ci charge ensuite Je conteneur sur Je navire la position assigne. Lorsque Je
conteneur est dans la file d'attente pour tre charg, un vrificateur, situ dans la patte de la
grue et muni d' un transmetteur de donnes, saisit Je numro du conteneur et valide la position
de celui-ci sur Je navire. Dans Je cas o le conteneur en fil d' attente ne serait pas celui qui est
prvu, le systme d'opration du terminal vrifiera les caractristiques du conteneur et
acceptera le changement s' il entrane une modification insignifiante sur le plan de
chargement.
Bien qu ' il s'avre trs rare que cet vnement se produise, il se peut qu ' une inspection
douanire soit ncessaire durant le processus de chargement. En effet, ce processus est
exceptionnel puisqu ' en gnral les inspections sur les conteneurs exports se font avant
l'arrive du navire. Dans ces cas, suite son chargement prs de la pile, le vhicule de
transport interne se dirige vers la zone d' inspection des douanes et Je conteneur est dcharg
pour tre inspect. Le processus d' inspection est le mme que dans Je cas d' un dchargement
de navire. Une fois ce processus termin, le vhicule de transport interne se dirige vers le
navire et Je processus de chargement reprend. La figure 3.3 reprsente ce processus incluant
la possibilit d' une inspection durant les oprations.
Figure 3.3 Processus de chargement des conteneurs
66
3.1.3 Processus de rception et de livraison par barges
La zone d'oprations portua ire inclut aussi les oprations de rception et de livraison par
barges. Dans ces cas, les processus sont simi laires aux processus de chargement et de
dchargement des navires. En effet, le processus de livraison par barge est l'quivalent d' un
chargement de navire, tandis que le processus de rception par barge est l' quivalent d' un
dchargement de navire. Par contre, les oprations sur les barges ne requ irent pas to ujours la
prsence d'agents des douanes, puisque les barges so nt aussi utilises pour le transpoti
rgional de contenems .
3.2 Processus de la zone d'oprations terrestre du terminal
La zone d' oprations terrestre comprend les opration s de rception et de livraison de deux
modes de transport: les trains et les camions .
3.2.1 Processus d'identification des camionnems et de traitement des oprations de
transport routier
Le processus d' identification des camionneurs et de traitement des oprations de trans pott
routier est une tape pralable aux oprations sur les camions. En effet, c' est au cours de ce
processus qu'est produite la documentation ncessaire au camionneur pour accder au
terminal.
Ce processus dbute lorsque le chauffeur du camion se prsente au bureau elu terminal. Le
chauffeur prsente une catte d'identit et une photo est prise. Une fois ces tapes compltes,
l' tape suivante consiste dterminer les besoins de celui-ci .
En gnral, les camtons se prsentent au terminal charg, de mani re maximiser leurs
revenus en combinant les oprations de rception et de livraison de conteneurs . Par contre, il
arrive qu'un camion vide se prsente au terminal. Dans ces cas, la suite des oprations est
d'identifier le conteneur livrer pour crer le reu de tenninal qui dmmera accs au tenninal
et mettra en branle le processus de livraison par camion.
67
Lorsque le camion se prsente au terminal charg d'un conteneur, la suite des oprations
dpend du statut de celui-ci. En effet, il peut s'agir d'un conteneur plein, d'un vide ou d' un
retour de douane. Dans Je premier cas, le sceau de scurit est vrifi et une position sur le
tenninal est assigne au conteneur. Dans Je second cas, le conteneur est inspect afin de
s'assurer de son bon tat et la position assigne est indique au chauffeur. Dans le troisime
cas, la documentation, qui accompagne le retour, est val ide et une position est assigne. Le
statut du conteneur, soit vide, plein ou retour de douane, se retrouve sur le rcpiss (waybi/1)
du camionneur. Ce document, qui est cr par le transporteur routier, est utili s dans cette
industrie pour dcrire le chargement transp01t, ainsi que l'origine et la destination de celui CI.
Une fois ces tapes compltes, il existe deux possibilits pour la su ite des oprations . Dans
un premier temps, si le camion ne livre pas de conteneur, un reu de term ina l est cre et une
copie est remise au chauffeur. Le camion se prsente ens uite la gurite et le processus de
rception des conteneurs par camions dbute. Dans un deuxime temps, l'a utre possibilit est
que le camion procdera ensuite une livraison de conteneur. Dans ce cas, le conteneur
livrer est identifi et un reu de terminal est cr pour la rception et la livraison des
conteneurs. Une fois le reu complt, le camion se prsente la gurite pour commencer les
processus de rception et de livraison. Dans le but de diminuer les transp01ts vide, les
camions vont gnralement se prsenter au terminal charg d' un conteneur et quitter le
tenninal charg d'un autre conteneur. La figure 3.4 illustre le processus d' identification des
camionneurs et de traitement des oprations de transp01t routier.
68
Processus de
Retoor de douane Valida!lon du
rntour
1---
r~
-.
Inspection
ld&nUfica~n
physiQue du
du dlauffeur
conteneur
Non
P!ei'n
Vrification
'---_;,.-<ot du sceau de
soorit
1 - -- - '
lden~ifiCilt.lon
ooo1eneur
li'vrf!f
Processus de
rception
Processus de
livraison
Figure 3.4 Processus d'identification des camionneurs et de traitement des oprati ons de transport routier
3.2.2 Processus de rception par camion
Le processus de rception par camion est prcd par le processus d' identification des
chauffeurs. Une fois celui-ci complt, le camion se prsente la gurite et le processus de
rception commence. Ensuite, le reu de terminal est vrifi. S' il est valide, l'accs est
accord; s'il ne l'est pas, l' accs est refus et le processus prend fin . Lorsque l' accs est
valide, la prochaine tape du processus est le dplacement du camion jusqu ' location
assigne au conteneur. Le camion est ensuite dcharg par un pont roulant sur pneumatiques
et le conteneur est dpos dans la pile. Un vrificateur saisit le numro du conteneur sur un
transmetteur de donnes et valide ou corrige la position de celui-ci.
La livraison ou non d' un conteneur par le camion influence la suite du processus. Si oui, le
processus de rception prend fin et le processus de livraison dbute; si non, le camion
retourne la gurite, le chauffeur signe le reu de terminal et le camion quitte. Le processus
de rception par camion et les diffrentes possibilits qu'il comporte sont illustres par la
figure 3.5.
69
Processus
'ideotific.ation
V<ificatior.
reu terrninal
Signature
reu t.erminal
Figure 3.5 Processus de rception des conteneurs par camion
3.2.3 Processus de livraison par camion
Le processus de livraison d ' un conteneur par camion est toujours prcd du processus de
rception ou du processus d ' identification des chauffeurs. Par contre, la premire possibilit
est plus frquente que la seconde.
Lorsque le camion s'est prsent vide la gurite du terminal , le chauffeur doit prsenter le
reu de terminal issu du processus d ' identification. Si le reu est valide, l'accs est accord
au chauffeur. Dans le cas contraire, l'accs est refus et le processus prend fin. La suite du
processus est la mme, peu importe la provenance du camion.
Lorsque l'accs au terminal a t accord ou lorsque le processus de rception est complt,
le camion se dirige vers la pile o est situ le conteneur. Une fois rendu, un pont roulant sur
pneumatiques prend le conteneur et le dpose sur le camion. Il est possible que le conteneur
ne soit pas accessible. Dans ce cas, des manutentions supplmentaires doivent tre effectues
afin de dgager le conteneur dsir.
L'tape suivant le chargement du camion est le retour de celui-ci la gurite du terminal.
Ensuite, un vrificateur et la scurit du terminal vrifient que le numro de conteneur et ce
qui est inscrit sur le reu concordent. S'il y a concordance, le chauffeur signe le reu et quitte
70
le terminal, le cas contraire entrane un retour la pile pour corriger la situation . La figure 3.6
reprsente le processus de livraison par camion.
Prcx:essus
d'identification
V<ificaliot1
reu
terminal
Processus da
rplion
Figure 3.6 Processus de li vraison des conteneurs par camions.
3.2.4 Processus de rception par train
La rception de conteneur peut aussi s' effectuer par train. Dans ces cas, le processus dbute
par l'envoi d' une note d' arrive au terminal provenant du tran sporteur ferroviaire . Dans les
cas o la capacit des voies ferrs du terminal est infrieure la longueur des blocs de
wagons, le terminal doit ensuite tablir l'ordre de priorit des blocs de wagons pousser sur
le terminal. Avant l'arrive des trains sur le terminal, les planificateurs de ce dernier doivent
tablir la rpartition des trains sur les voies ferres du terminal.
Une fois les wagons rendus sur le terminal, un vrificateur saisit les numros de conteneur
l' aide d' un transmetteur de donnes. Le systme d' opration du terminal associe ensuite les
numros de conteneurs avec leurs informations respectives, ce qui permet aux planificateurs
71
du terminal d'tablir la squence d ' oprations pour le dchargement des wagons. Par la suite,
une position sur le terminal est assigne aux conteneurs pour l'entreposage.
Le systme d 'opration du terminal envoie ensuite la squence d'opration pralablement
tablie au pont roulant sur pneumatiques. Ce dernier procde alors au dchargement des
conteneurs. Lorsqu'un conteneur est dcharg, il est dpos sur un vhicule de transport
interne. L'oprateur de celui-ci procde ensuite un appel radio du numro, afin de connatre
la position qui lui a t assigne sur le terminal. Le vrificateur saisit le numro dan s un
transmetteur de donnes, ce qui permet au systme d 'opration du terminal d'associer le
numro de conteneur la position qui lui a t assigne. Le vrificateur indique ensuite
l'oprateur du vhicule de transport interne la position et celui-ci se dirige vers cet
emplacement. son arriv la pile, le conteneur est saisi par un pont roulant qui le dpose
dans la pile. Un vrificateur, situ prs de celle-ci, saisit le numro du conteneur dans son
transmetteur de donnes et valide ou corrige la position de celui-ci. Le processus de rception
des conteneurs par train est schmatis sur la figure 3. 7.
SOT associe
no. de
Figure 3.7 Processus de rception des conteneurs par train
72
3.2.5 Processus de livraison par train
Le train constitue un autre mode de transport pour la livraison des conteneurs imports. Ce
processus de livraiso n diffre de celui par camion puisque les trains ne possdent pas
l'autonomie de mouvement des camions, ce qui implique qu'ils doivent tre chargs dans une
section ddie du terminal. Ce processus suit gnralement la rception de conteneurs par
train. En de trs occasions seulement, les wagons utiliss pour la livraison ne proviendront
pas du processus de rception.
La premire tape du processus de livraison est l'identification des conteneurs prioritaires par
le planificateur. Ces conteneurs ont t pralablement identifis par la ligne de transpoti
maritime et constituent gnralement les conteneurs dont la date de li vraison est la plus
rapproche. Une fois ces conteneurs identifi s, le planificateur cre le plan de chargement et
cre, ens uite, la squence de travail. Cette squence est envoye au vrificateur qui la reoit
sur son transmetteur de dom1es.
Par la suite, le vrificateur informe les oprateurs du pont roulant travaillant sur la pile et elu
vhicule de transpoti interne de la position elu conteneur, afin qu ' i1 soit charg sur le
vhicule. Dans certains cas, il arrive que le conteneur ne soit pas accessible, ce qui ncess ite
un transfeti de conteneur afin d' extraire celui qui doit tre charg. Un tra nsfert de conteneur
entrane une ou des modifications de position, qui doivent tre corriger par le vr ificateur afin
d'viter des erreurs de location clans le systme d' opration du terminal.
Une fo is que le vhicule de transpoti interne est charg, le vrificateur transmet la position du
conteneur sur le train, qui lui a t assign lors de la cration du plan de chargement, aux
opratems du vhicule de transport inteme et elu pont roulant qui travaille sur le train. Le
conteneur est ensuite transport vers le train, o le pont rou lant le dcharge elu camion et le
transfeti sur le train.
Lorsque le chargement du train est complt, un vrificateur muni d' un transmetteur de
donnes saisit les numros de conteneurs et de wagons afin de valider le chargement. La
validation est effectuer par le planificateur et lorsqu' elle est complte, le plan de chargement
- - - ------------
73
est envoy au transporteur ferroviaire par change de donnes informatises. De plus, une
liste indiquant les conteneurs chargs est envoye aux lignes maritimes. Par contre, cette liste
n'est pas la mme pour toutes les lignes maritimes, puisqu 'elle ne rvle pas les conteneurs
des comptiteurs, mais seulement leurs conteneurs. La figure 3. 8 reprsente le processus de
livraison par train.
Figure 3.8 Processus de li vraison par train.
3.3 Processus de la zone de stockage du terminal
La zone de stockage du terminal est la section du terminal o sont entreposs les conteneurs.
L'ordre d'entre et de sortie des conteneurs tant inconnue et difficilement prvisible, des
remaniements de conteneurs peuvent tre ncessaires pour accder d' autres conteneurs.
(Pour une reprsentation graphique du phnomne, voir la figure 1.8 du chapitre 1.)
3.3.1 Processus de remaniement de conteneurs
Tel qu'il a t vu dans les processus prcdents, des remaniements peuvent se produire au
cours de ces processus pour avoir accs au conteneur ncessaires. Dans le cas prsent, il
s'agit d ' un processus de remaniement des conteneurs avant l' arrive d' un navire. Ces
remaniements sont parfois ncessaires afin de librer de l'espace de stockage pour les
conteneurs du prochain navire. Par contre, les oprateurs de terminaux maritimes tentent de
74
les mmtmtser puisqu'ils reprsentent des mouvements improductifs et qu'ils monopolisent
les quipements ncessaires aux autres processus du terminal.
La premire tape du processus de remaniement est d' identifier les conteneurs qui doivent
tre dplacs. Ensuite, une squence d'opration est tablie par un planificateur du terminal.
Une fois la liste cre, e lle apparat sur le transmetteur de donnes d' un vrificateur. Ce
dernier indique ensuite l'oprateur du pont roulant le conteneur dplacer. Le conteneur est
ensuite extrait de la pile et dposer sur un vhicu le de transport interne. Le vrificateur
indique la nouvelle localisation du conteneur au conducteur du vhicule et celui-ci transporte
le conteneur cette localisation, o il est saisi par un pont roulant et dpos dans la pile. Une
fois que le conteneur est dans la pile, un vrificateur saisi le numro de la bote l'aide d' un
transmetteur de donnes et corrige la position du conteneur afin de mettre jour les donnes
du systme d'opration du terminal. La figure 3.9 illustre le processus de remaniement des
conteneurs.
Figure 3.9 Processus de remaniement des conteneurs.
3.4 Flux d'informations
Les processus d ' un terminal de conteneurs sont supports par une multitude de flux
d' informations qui incluent plusieurs intervenants. Afin de comprendre ces flux, cette section
prsente les flux en amont du terminal, depuis la vente du service de transport par la ligne
maritime, et en aval, jusqu ' la rception de la liste de conteneurs chargs sur le navire par le
terminal de destination de ce dernier.
75
3.4.1 Flux d'informations en amont du terminal
Les flux d'infom1ations dbutent avec l' offre de service du dpartement de vente de la ligne
maritime. Lorsque le client accepte le prix propos, il doit ensuite effectuer une rservation
en fonction de la date de dpart d'un navire et de la destination choisie.
Les clients peuvent effectuer leur rservation de plusieurs faons. La premire est vta
tlphon e avec un employ de la ligne maritime. Ce dernier entre la rservation au systme
d' information de l'entreprise en obtenant les informations du client. La second e faon est par
l' envoi d' un coLmier lectronique la ligne maritime qui inclut les informations sur la
rservation. Une troisime voie peut tre utilis par les clients, il s' agit d' utiliser un systme
de rservation en ligne. Panni les systmes existants, on retrouve le systme INTTRA qui a
t dvelopp par un consortium comprenant plusieurs lignes maritimes. Les systmes de
rservation en li gne pennettent aux clients d'effectuer une demande de rservation en li gne.
Par contre, le succs de la rservat ion en li gne demeure mit ig . En effet, les c li ents sont
rticents utiliser ce systme puisqu'il ne pennet pas de confinner la rservation, mais
seulement d'effectuer une demande, la confirmation ve nant plus tard de la li gne maritime.
Une fois la rservation fa ite, la ligne maritime envo ie l'expditeur, une confirmation qui
contient l'ensemble des informations concernant la rservation. De plus, ces informati ons
sont envoyes au terminal maritime et/ou au transporteur fe rroviaire via EDI. Si la li gne
maritime coordonne la cueillette du conteneur vide, el le devra engager un transporteur routier
pour cueillir le conteneur vide et le livrer chez l'expditeur.
ce point, l' information finale n' est pas connue, il s' agit donc de l' information ncessaire
la coordi nation de la cueillette du conteneur vide pour le livrer chez le client et ensuite le
livrer au tem1inal maritime pour le chargement sur le navire.
Pour la cueillette du conteneur vide, deux possibilits s' offrent l'expditeur; donner la tche
la li gne maritime d'organiser la cueillette et la livraison au point de chargement elu
conteneur, ou effectuer elle-mme les arrangements. Dans le premier cas, c' est la ligne
76
maritime qui s ' occupera de coordonner l' ensemble des oprations jusqu' la livraison au
tenninal maritime.
Une fois que le conteneur est prt tre li vrer au terminal, le transpotteur routier ou
fetToviaire envoie les informations concernant le conteneur au tenninal qui peut ainsi
comparer les informations envoyes par ces derniers et les informations en provenance de la
ligne maritime.
3.4.2 Flux d'informations en aval du terminal
Les flux d' infonnations en aval du tenninal ont pour objectif de coordonner la suite des
oprations de livraison des conteneurs aux destinataires finaux. La majorit de ces
informations constituent des informations en amont pour le prochain terminal visit par le
pOtte-conteneurs.
Trois jours ouvrables aprs le dpart du navire du terminal, ce dernier doit fermer le
navire, c'est--dire qu'il doit confirmer le plan de chargement final et l' envoyer la ligne
maritime et au terminal de destination du navire. Ce processus de fenneture du navire est trs
imp01tant, puisqu'il permet de confirmer la liste de chargement du navire en liminant les
conteneurs qui n'ont pu tre charg sur le navire. Dans les cas o le terminal de destination
est un terminal de transbordement, ces derniers peuvent envoyer 1'information au termina! de
destination finale du navire.
Cette information est ncessaire afin que le terminal de destination, qu ' il soit un centre de
transbordement ou non, puisse effectuer une planification de la cour qui permettra de trier les
conteneurs selon diverses caractristiques .
Pour le transport transatlantique, le terminal de destination reoit gnralement 1' information
3 jours ouvrables avant l'anive du navire. Par contre, d au temps de transit de 7 jours et au
week-end, il se peut que les informations soient reues seulement 48 heures avant l' arrive du
navire.
77
Les informations concernant la progression du navire sont transmises par le capitaine de
celui-ci la ligne maritime propritaire du navire quotidiennement. De cette faon, les
diffrents intervenants concerns peuvent tre tenus au courant de l'volution du navire.
3.5 Conclusion
Ce chapitre avait pour objectif de dtailler les divers processus d'un terminal maritime de
conteneurs . Tel que mentimm en introduction du chapitre, ces processus ont t tab li s
partir d' observations effectues dans des pmts de la cte Est canadienne. Bien que les
niveaux d'activit des diffrents ports de cette rgion ne sont pas comparables ceux des plus
grands ports du monde, il reste que la complexit inhrente la planification et la gestion
des oprations est aussi prsente dans ces pmts. Donc, les pmts de la cte Est canadienne
peuvent aussi bnficier de l' utilisation d' outils d' aide la dcision. Dans le but de
positionner les pmts canadiens par rapport aux ports du reste du monde en ce qui a trait
l'utilisation de ces outils, le chapitre suivant prsente une analyse comparative entre les deux
groupes de ports.
CHAPITRE IV
ANALYSE COMPARATIVE DE L'UTILISATION DES SYSTMES DE TRANSPORT
INTELLIGENTS ENTRE LES PORTS DE LA CTE EST CANADIENNE ET LES
PORTS DU RESTE DU MONDE
Les chapitres prcdents ont dmontr les dfis et enjeux avec lesquels les terminaux
maritimes de conteneurs doivent composer. partir de ceux-ci, il peut tre conclu qu'il y a
un besoin de technologies de gestion de l'information et d'aide la dcision pour relever et
grer ces dfis et enjeux. Les systmes de transport intelligents (STI) rpondent ce besoin et
peuvent fournir ces technologies aux terminaux po1tuaires de conteneurs. Plusieurs terminaux
importants ont mis en place des systmes de transport intelligents des degrs divers
d'avancement. Cependant, o en sont les terminaux de la cte Est canadienne dans leur
intgration de ces technologies?
Ce chapitre a donc pour objectif de comparer 1'tat d'avancement des po1ts de la cte Est
canadienne avec les ports les plus importants du reste du mond e, quant l' utilisation des
systmes de transpo1t intelligents. Pour ce faire, le chapitre est organis comme su it: la
section 4.1 prcise la notion de systmes de transpo1t intelli gents, en 4.2, la mthodologie
utilise pour cette analyse est dtaille, tandis que la section 4.3 prsente diffrentes formes
de STI implantes clans des terminaux portuaires de conteneurs. Les STI prsents au sein de
la section 4.3 sont regroups en trois groupes, soit les STI internes, les STI app liqus aux
relations avec les partenaires et les STI utiliss des fins de scurit. En se basant sur ces
systmes existants, la section 4.4 explore des STI potentiels qui pourraient tre dvelopps,
dans un avenir proche. Avant de prsenter l'tat d'avancement des STI clans les ports de la
cte Est canadienne, la section 4.5 met en contexte les pmts concerns par l'analyse. En 4.6,
les systmes de transport intelligents utiliss dans les ports de cette rgion sont prsents et
un pmtrait de la situation dans les autres ports canadiens et dans les pmts amricains est
prsent. Finalement, la section 4.7 prsente des opportunits s'offrant aux ports de la cte
79
Est canadi enne et le r le que peuvent j ouer les STI dans l' appropriation de ces opportunits.
Le chapitre se termine avec une brve co nclusion en 4. 8.
4.1 Systmes de transport intelligents
Tout d 'abord, il importe de dfinir qu 'est-ce qu ' un systme de transport intelli gent. Plus ieurs
dfiniti ons
existent,
parmi
cell es-ci,
l'organi sme
STI
Canada
retient
la
suivante: L'application des techno logies avances et mergentes (ordinateurs, capteurs,
commande, communication et dispos itifs lectroniques) dan s le transport pour sauver des
vies, du temps, de l'argent, de l' nergie et l' environnement. De son ct, l'organi sme ITS
America retient ce ll e-c i : Les systmes de transport intelli gents comprennent un large
ventail de techno logies de l' information, de la communicati on et de commande, ainsi que
des di spos itifs lectroniques. Lorsque appliques l' infrastructure de transport ou aux
vhicules eux-mmes, ces techno logies permettent de suivre et de grer les flux de trafi c, de
rduire la congesti on, de fo urnir des routes alternatives aux voyageurs, d 'augmenter la
productiv it et sauver des vies, du temps et de l'argent.
Dcisions
valeur ajout
Fusion
.............,___....M Analyse
Partage
d'informations
Figure 4.1 Modle de traitement des donnes d'un systme de transpo rt intell igent (adapt de Crainic 2006)
La figure 4.1 prsente le modle de traitement des donnes, par un STI, retenu par Crainic
(2006). Ce modle reprsente le traitement des donnes d ' un STI appliqu un oprateur
priv, comparativement un STI public. Ce dern ier type d ' applications de STI ne sera pas
cons idr, afin de lim iter l' envergure de l'tude. La premire tape consiste la co ll ecte des
donnes ncessaires la prise de dcision. Ces donnes peuvent provenir de sources diverses
et multip les . Les donnes sont ensuite fusionnes afin de les organiser, de les nettoyer et de
80
les valider. Les donnes fusionnes sont analyses ce qui permet la prise de dcisions
valeur ajout et/ou le pa1tage d'infonnations. Dans le but de rendre le systme dynamique,
les rsultats issus du processus d' analyse peuvent tre rutiliss comme intrant au systme.
Tel qu ' il peut tre constat, ce modle sous-tend l'existence de deux types de techno logies au
sein de ces systmes, soit les teclmologies matrielles (hardware) et les technologies
logicielles (software). Du ct des technologies matrielles, on retrouve, entre autres, les
systmes de positionnement global (GPS), l'change de donnes informatises (EDI), les
systmes de suivi des vhicules et du cargo, la communication bidirectionnelle ain si qu ' un e
panoplie de systmes informatiq ues monts bord des vhi cul es . L'ensembl e de ces
systmes s'adresse principalement au premier bloc elu modle de traitement des donnes, so it
la collecte de d01mes, et la diffusion des informations vers les diffrents partenaires de
l'entreprise. Du ct des technologies logicielles, on retrouve notamm ent les modles
d'optimisation, la simulation et l'analyse statistiqu e. Ce sont principalement ces outil s qui
sont utiliss pour la fusion et l'analyse des donnes desquels dcoulent les dcisions valeur
ajout.
Les STI ddi s au transport de marchandi ses sont traditionnellement regroups au sei n de
deux grand s groupes : les systmes avancs pour l'opration des vh icu les commerciaux
(Commercial Ve hicle Operations) et les systmes avancs pour la gestion de flottes
(Advanced Fleet Management Systems) (Crainic, Gendreau 2004).
Les systmes avancs pour l'opration des vhicu les commerciaux se retrouvent au niveau
institutionnel. Ils visent am li orer la performance des infrastructures de transpott et des
postes douaniers ainsi qu' automatiser et simplifier les contrles gouvernementaux sur les
oprations de transport de marchandises. Pour ce faire, ces systmes utilisent entre autres le
systmes de suivi des vhicules et du cargo, la communication bidirecti01melle et l'change
de donnes infonnatises.
Les systmes avancs pour la gestion de flottes , de leur ct, se retrouvent au niveau priv,
donc au niveau de l'oprateur. L'objectif de ces systmes est de fournir de l' information en
81
temps rel sur les diffrents vhicules de la flotte, afin de centraliser l' information et de
1' utiliser pour la planification et la gestion des activits du transpmteur. Ainsi, 1'oprateur de
la flotte est en mesure d' obtenir une allocation et une utilisation efficiente de la flotte, ainsi
que la satisfaction des besoins de sa clientle. Les systmes utiliss pour les systmes avancs
de gestion de la flotte sont gnralement les mmes que dan s le cas des systmes avancs
pour l' opration des vhicules commerciaux, mais incluent un e paJt plus importante d'aid e
la dcision.
4.2 Mthodologie
Tel que mentionn dans le titre, ce chapitre pour objectif de dresser un portrait de 1'tat
d' avancement de l'utilisation des systmes de transpmt intelligents entre les pmts de la cte
Est canadienne et les ports du reste du monde. L'objectif est de dterminer le niveau
d' intgration des systmes de transpmt intelligents de ces ports, pour ens uite identifier des
opportunits d' utilisation de ces systmes pour les pmts de la cte Est canadi enne.
Afin de dresser ce portrait, il est ncessaire de dfi nir le point de comparaiso n utilis pour
valuer le niveau d'intgration des systmes de transport inte lligents par les ports de la cte
Est canadienne. Ce point de comparaison est clone constitu des informations provenant de la
revue de littrature effectue au deuxime chapitre de ce document, ain si que des
informations qui ont pu tre recueillies sur les sites web des ports internationaux
manutentionnant de grands volumes de conteneurs. Ces ports incluent nota mment les ports de
Hong Kong, Singapour, Rotterdam, Hambourg, Anvers, Kaos hiung et Pusan. Ils ont t
choisis, puisqu ' il s'agit des pmts qui manutentionnent les volumes an11uels de conteneurs les
plus importants, ce qui en fait les ports les plus susceptibles de mettre en place des STI d
la complexit provenant de la gestion de ces volumes importants de conteneurs. Les
diffrents systmes de transport intelligents utiliss par ces ports ont t relevs pour
constituer une liste d 'applications possibles de STI clans les ports. Donc, les systmes relevs
ne sont pas ncessairement implants dans l' ensemble des ports du groupe, mais plutt une
accumulation des systmes relevs afin de construire un point de rfrence utilisant
les mei lleures pratiques dans le domaine.
--
--
--
82
Quant aux donnes sur les terminaux de conteneurs de la cte Est canadienne, qui seront
prsentes ultrieurement, elles proviennent de visites aux diffrents terminaux des potts de
Montral et Halifax et de discussion avec les dirigeants de ces terminaux. De plus, des
infonnations sur le pott de Vancouver ont t amasses pattir de la littrature afin de ne pas
ngliger ce port qui manutentionne le volume de conteneurs le plus impmtant au Canada. Par
contre, puisqu'il n'a pas t possible de visiter ce port, ni de rencontrer les dirigeants des
compagnies qui y oprent les terminaux de manutention de conteneurs, l' ana lyse ne sera pas
la mme pour le port de Vancouver.
4.3 Les systmes de transport intelligents dans les terminaux portuaires de conteneurs
Une fois les STI dfinis, une question peut tre souleve : Pourquoi app liquer les STI aux
tenninaux pottuaires de conteneurs? L"utilit des STI provient des divers enjeux inhrents
la planification et la gestion de ces tenninaux. En effet, tel qu ' il a t constat dans le
chapitre II, la gestion d ' un terminal implique la prise de nombreuses dcisions comp lexes et
la gestion d'une quantit impmtante d'informations. De plus, la congestion croissante des
terminaux ainsi que l'incettitude lie la planification et la gestion des terminaux maritimes
de conteneurs ajoutent cette complexit. partir de ces constatations, il peut tre conc lu
qu'il y a un besoin de technologies pour assister les gestimmaires clans la pri se de dcision s et
la gestion de l'information, afin de coordonner les oprations de ces terminau x. L ' application
des STI aux terminaux maritimes de conteneurs constitue une rponse ce besoin. Cette
section vise prsenter les formes que peuvent prendre les STI dans les terminaux pmtuaires
de conteneurs.
Les applications de STI dans les terminaux portuaires de conteneurs peuvent tre regroupe
en deux principaux groupes : les systmes internes du terminal et les systmes de
communication et collaboration avec les pattenaires. l'intrieur de ces deux groupes, les
systmes peuvent tre classs selon leur utilisation, d'une part pour la collecte et la
distribution de l'information, d'autre patt pour la gestion des oprations. ces deux groupes,
un autre peut tre ajout, soit l' automatisation des oprations physiques du terminal.
83
Finalement, bien que la scurit dans les ports ne constitue pas le sujet principal de cette
tude, 1'utilisation des STI pour la gestion de la scurit dans les p01ts sera traite la fin de
cette section elu chapitre.
4.3.1 Les systmes de transport intelligents l'intrieur des terminaux maritimes de
conteneurs
l'intrieur des tenninaux, les STI sont utiliss pour grer les flux de conteneurs entre les
diffrentes sections du terminal et entre les diffrents modes de transport.
4.3. 1.1 Collecte et distribution de l'information
L'application de systmes de transp01t intelligents pour la collecte et la distribution de
l' information l'intrieur des tenninaux maritimes de conteneurs repose principalement sur
les technologies matrielles de ces systmes, bien que ce1tains systmes comprennent une
composante logicielle.
Parmi celles-ci, une forme grandement rpandue de ces technologies, est 1' utilisation de
systmes de communications informatiques p01tables. Ceux-ci cons istent en un tenn inal
informatique reli au systme d'oprations du termina l qui permet aux employs d' avoir un
accs distru1ce aux informations sur un conteneur. Gnralement, ces appareils sont
constitus d'un cran pour afficher les donnes et d'un clavier pour saisir les numros de
conteneurs, le tout contenu dans un botier muni d'une poigne qui permet de le tenir une
seule main. La transmission des dmmes peut tre effectue via plusieurs modes de
communication, bien que le plus rpandue soit l'utilisation de frquences radios.
Dans le mme ordre d'ide, des systmes de communications bidirectionnelles peuvent tre
installs l'intrieur des quipements de manutention du terminal. Ces systmes consistent
en un appareil semblable aux systmes de communications informatiques portables, mais qui
est incorpor l'intrieur de la cabine de l' oprateur de l'quipement de manutention. Ces
systmes sont gnralement utiliss pour communiquer les tches effectuer aux oprateurs.
84
Une autre technologie de collecte de donn es est l' utilisation de la reconnaissance optique de
caractres. Cette technologie combine l' utili sati on de photographies numriques et de
logiciels de reconnaissance des caractres. Le pr incipe de ces systmes co nsiste prendre une
photo du numro de conteneur pour ensuite 1' identifier 1' aide du logiciel de reconnaissance
des caractres. Le numro peut ensuite tre utilis par le systme d'opration du terminal
pour la suite du processus en cours. La reconnaissance optiq ue de caractres peut tre utilise
en incorporant des camras sur les quipements du terminal et/ou en construisant des portails
au travers desquels les camions doivent circuler. Cette dernire possibilit est utilise pour
l' automatisation des oprations de la gurite du terminal.
Les systmes de positionnement mondial diffrentiel (differen tiai global positioning .system)
peuvent tre utiliss pour le suivi des quipements d'un terminal maritime de conte neurs. Ces
systmes utilisent cette technologie pour effectuer un suivi en temps rel des dplacements
des quipements et poLa- recueillir des informations sur des indicateurs prdfini s.
Des puces ou des sceaux intelligents peuvent aussi tre utili ss pour la collecte
d' infonnations sur les conteneurs. En effet, ces puces utilisent des frquences radios pour
transmettre les informations qu'elles contiennent. Deux types de puces sont rpertoris: les
puces actives et les puces passives. Dans le premier cas, la puce met des frquences qui
peuvent tre captes par une antenne situe sur le terminal et transmises au systme
d' oprations du tenninal; tandis que, dans le second cas, la puce agit pl utt comme un
rflecteur qui renvoie les informations sur le conteneur lorsque place l'i ntri eur d' une
certaine distance d' un metteur. Par contre, il importe de mentionner que la mi se en place
d' un tel systme ne dpend pas seulement de la volont elu terminal, puisque les puces
doivent tre en place sur les conteneurs avant qu' un terminal puisse les utiliser. Bien qu 'elles
ne soient pas utilises l'heure actuelle, ces teclmologies progressent rapidement. Un des
principaux freins la mise en place de ces puces est l' inexistence d' un standard commun
pour la transmission et la rception des donnes. Cette situation pourrait tre appele
changer prochainement puisque les puces et les sceaux intelligents sont vus comme un outil
efficace pour garantir l' intgrit du chargement. En effet, la puce ou le sceau, lorsqu' install
85
sur le mcanisme d 'ouverture des portes du conteneur, enregistre tout ouverture elu conteneur
ainsi que le moment auquel il a t ouvert.
Finalement, en termes de t:ranspmt de 1'i nfonnation entre les outils de co llecte de do nn es et
le systme d 'opration du terminal, il existe diverses technologies. Panni ce lles-ci,
l' utilisation des frquences radios est grandement rpandue, puisqu'elle ne ncessite pas une
importante implantation d 'quipements de commun ication. Les cbles de fib res optiqu es
combins l' utilisation de rsea ux locaux sans fil (Wi-Fi) constituent aussi un mode de
transport de l'information. Par contre, l' implantation d'un tel systme, dans un termina l
maritime de conteneurs, ncessite des travaux importants afm d 'enfouir les fi ls sous le pav.
4.3.1.2 Gestion des oprations
Les technologies prsentes pralablement taient axes vers la collecte et la distribution de
l' information. Par contre, afin de retirer le maximum de ces informations, ce ll es-ci do ive nt
tre traites. C ' est en traitant les informati ons que des systmes d'aid e la dcision peuvent
tre dve lopps. Les types de STI seront d ' abord prsents selon le nivea u d' inte lli ge nce
qu ' ils comprennent. Ensuite, ils seront prsents se lon l' ap proche utili se, so it une approche
globale ou une approche modulaire.
Plusieurs niveaux d ' aide la dci sion existent. La forme pri se par le STI variera selon Je
niveau d'aide la dcision utilis. Le premier niveau consiste la prise de dcis ions avec de
J'information brute. ce niveau, les STI affichent l' inform ation provenant des outil s de
collecte et de di stribution sans qu ' aucun traitement ne soit effectu. Cette information peut
prendre deux formes , soit en lot ou en temps rel. La premire fonne sera surtout utilise
pour la prise de dcisions tactiques. tandis que la seconde sera surtout utilise pour la prise de
dcisions oprationnelles et en temps rel.
Une premire forme de traitement consiste agrger J'information afin d'offrir aux
gestionnaires du terminal, un tableau de bord des oprations. Bien que, dans leur plus simple
expression, ces systmes ne font que prsenter l' infonnation agrge, ils pennettent la prise
de dcision avec une information plus complte. L 'utilisation de tableaux de bord des
86
oprations du terminal constitue le prem ier pas vers l' automat isation des processus
dcisionne ls du terminal. En effet, une foi s 1' informati on agrge, les fonctions du systme
peuvent tre l<u-gies en y aj outant un module de suggestion s. Ce module utili se l' information
recueill ie dans le tableau de bord pour suggrer des dcisions aux gesti onnaires du tenninal,
en se basant sur des rgles de dcision prdfinies . Les gestionnaires du termin a l ont ensuite
le choix d 'accepter la dcision propose par le systme ou de formuler leur dcision en
utilisant l' information provenant du tableau de bord. L ' introdu cti on d ' un modu le de
suggestions dans un tableau de bord est une premire fo rm e d 'aid e la dc is ion. Les fo rm es
d ' aide la dcision seront prsentes dan s la deux ime partie de cette sous-secti on.
Le niveau suivant de traitement de l' info rmation consiste auto matiser la pri se de dcisions.
L ' automati sation de la prise de dcisions peut se faire partiell ement ou co mpl tement. Par
contre, peu importe le niveau d' automat isation adopt, une superv is ion hum a in e doit tre
maintenue. La diffrence par rapport au niveau prcdent de traitement de 1' inform ation est
que les dcisions sont appliques automatiquement, sans qu ' il y ait une demand e
d ' approbation chacune des dcisions. La supervision du systme se fa it par le suivi des
indicateurs de perfonnances comptabiliss par l'o util mi s en place.
L ' introduction d 'o ut ils d 'aide la dc ision peut se faire se lon deux approches: une approche
globa le ou une approche par sous-systmes. Peu importe l' approche ut ili se, les out il s utili ss
seront les mmes, soit la simulation, l'analyse statistiqu e et 1'optimisation.
Dans le cas d ' une approche globale, l' uti lisation de mthodes d'optimisation est limite par la
taille et la complexit de pro blmes globaux. Bien qu' il ex iste des recherches sur des
problmes de cette ta ille et de cette complexit, peu de ce lles-c i ont menes des systmes
d ' aide la dci sion utilisables au niveau opratiotmel. C' est pourquo i, les approches g lobales
utilisent gnralement la simulation pour l'aide la dcision. Par contre, comme la
simulati on se prte mal l'aide la dc is ion au niveau oprati onne l, les approches globales
utilisant la simulation sont smio ut concentres sur le nivea u de plan ification stratgique, soit
le design de terminaux. En effet, ce niveau les dcisions qui sont prises concement la
capacit du terminal. Comme il s'avre difficile de prvoir de faon exacte les volumes futurs
87
du terminal, les mthodes dterministes s'appliquent difficilement ce type d'aide la
dcision. Pour des exemples de ces systmes, le lecteur peut se rfrer la section 2.1.6 du
chapitre II qui p01te sur les problmes de planification et de gestion des terminaux maritimes
de conteneurs.
En ce qui a trait aux approches modulaires, celles-ci se prtent beaucoup mieux l'utilisation
de mthodes d'optimisation. En effet, tel qu' il a t vu au pralable, des mthodes
d'optimisation ont t dveloppes pour la majorit des problmes de planification et de
gestion aux niveaux oprationnel et tactique. On retrouve donc dans cette catgorie
l'ensemble des modles d'optimisation de l'allocation de quai aux navires, de l'a llocation de
grues de quai aux navires, de planification du chargement, de planification et
d'ordonnancement de l'entreposage, ainsi que tous les autres modles vus au chapitre II.
Cependant, ces approches modulaires peuvent inclurent plus d' une problmatique de
planification et gestion . C'est notamment le cas de 1'a llocation de quais et de grues de quai
aux navires qui peuvent tre combines l'intrieur d'un mme systme d'aide la dcision,
tel que propos par Park et Kim (2003).
Les systmes intgrs d'oprations du terminal (SOT) constituent la principale application
courante de systmes de transpo1t intelligents pour le traitement et la gestion de l' infom1ation
l' interne du terminal. Ces systmes comprennent plusieurs modules, qui regroupent
diverses problmatiques de la gestion des terminaux pmtuaires de conteneurs. Le cur de ces
systmes est un systme de gestion de l' inventaire des conteneurs sur le terminal. Ce dernier
enregistre les mouvements de conteneurs. Par mouvements, il est ici entendu les transfe1ts
de conteneurs vers les autres modes de transpo1t et les changements de position des
conteneurs dans la cour. De plus, les SOT peuvent auss i comprendre des modules d'aide la
dcision pour les problmes de planification et de gestion des terminaux portuaires de
conteneurs. En effet, des modules pour dterminer l'allocation de grues de quai aux navires et
la planification du chargement sur les navires existent dj depuis un certain temps, tandis
que des modules pour le transport interne des conteneurs commencent faire leur apparition.
88
4.3.1.3 Automatisation des oprations
L'automatisation des oprations constitue une autre forme de STI qui peut se faire divers
niveaux dans un tenninal. En premier lieu, le transport des conteneurs l' intrieur du
tenninal peut tre automatis. L'automatisation du transpmt interne consiste remplacer les
camions conventionnels paT des plateformes de transpmt guides lectroniquement (voir
figure 1.3a).
Ensuite,
les
oprations
de
stockage
des
conteneurs
peuvent
tre
automatises.
L'automatisation du stockage des conteneurs consiste utiliser des ponts roulants sur rail s
sans oprateur. Les oprations de stockage et d' extraction des conteneurs dans la pile sont
donc contrles par un systme de contrle automatis. Le terminal Deltapott du port de
Rotterdam fut un des pionniers clans l' utilisation de systmes de transpott et de stockage des
conteneurs automatiss (www.ect.nl).
Finalement, les grues de quai peuvent tre partiellement automatises. En effet,
l'automatisation est ici partielle, puisque la grue utilise deux chariots pour le transfert des
conteneurs entre Je navire et Je quai. Le premier, qui effectue les transfetts entre le navire et
une plateforme dans l'empattement de la grue, ncessite un oprateur humain; tandis que le
second, qui charge et dcharge les vhicules de transpott interne est automatique.
4.3.2 STI et telations entre les terminaux maritimes de conteneurs et leurs partenaires
L'application de STI aux relations entre les terminaux maritimes de conteneurs et leurs
partenaires permet l' intgration des acteurs des rseaux de transpmi intermodaux, ce qui
pure les flux physiques et infonnationnels au sein de ces rseaux.
4.3.2.1 Collecte et distribution de l'information
La collecte et la distribution d' information entre les terminaux de contenews et leurs
pmtenaires est une des premires applications de systmes de transport intelligents au
domaine du transport maritime. En effet, les transporteurs maritimes et les tenninaux
maritimes de conteneurs ont t parmi les premiers utilisateurs de 1'change de donnes
89
informatises (EDI), prcurseur des STI. Aujourd'hui, rares sont les terminaux qui ne
l' utilisent pas pour l'change de manifestes, de plan de chargement et autres documents relis
au transport de conteneurs.
Avec le dveloppement de 1'Internet et de ses applications au domaine des affaires, plusieurs
entreprises ont dvelopp des processus d'affaires lectroniques. Les terminaux maritimes de
conteneurs ne font pas exception. En effet, le suivi d'un conteneur peut maintenant tre
effectu sans qu'il soit ncessaire de contacter le termina l, par l' utilisation des systmes de
suivi du cargo qui sont disponibles sur les sites web des terminaux. Pour ce faire, les clients
entrent le numro du conteneur ainsi qu'un nom d'utilisateur et un mot de passe aux endro its
appropris et le systme de gestion d'inventaire du terminal leurs fournit le statut du
conteneur.
La logistique lectronique ou cyberlogistique (e-logistics) est une forme d'affaires
lectroniques applique la logistique. Plus prcisment, la logistique lectronique vise
raliser les activits traditionnelles de la logistique (planifier, organiser, diriger et contrler
les flux physiques, informationnels et financiers) l' intrieur du nouve l environnement
d'intgration des pmtenaires et d ' changes lectroniques purs (Crainic et Gendreau 2004).
Donc, par rapport aux processus d'affaires lectroniques, la cyberlogistique intgre
1' information change avec les pmtenaires et la prise de dcisions pour la planification des
activits traditionnelles de la logistique.
4.3.2.2 Gestion des oprations
Certaines problmatiques de la gestion des terminaux maritimes de conteneurs ncessitent
d'tre traites en partenariat avec les pa1ties prenantes concernes par les dcisions prises.
C'est notamment le cas du chargement des navires et trains. En effet, clans le premier cas, le
terminal effectue un premier plan du chargement et le soumet la ligne maritime qui le
valide ou Je modifie. Dans le second cas, le transpo1teur fenoviaire ne choisit pas toujours les
conteneurs qui seront chargs, mais indique la destination prioritaire charger (par exemple :
Toronto, Chicago, Dehoit, etc.) et foumi un plan de chargement dsir. Donc, les systmes
d'aide la dcision qui sont dvelopps pour ces problmatiques doivent tenir compte des
90
spcifications des parties prenantes, bien que, dans ces cas-ci, le STI peut tre implant pour
Je terminal seulement, mais les rsultats qu ' il fournira doivent tre discuts avec les
partenaires.
La cration d' un horaire de service pour les camions est une forme de systme d'aide la
dcision qui a un impact sm les pattenaires. Concrtement, la cration d'un hora ire de serv ice
consiste allouer une fentre de temps aux transporteurs routiers 1' intrieur de laq uell e un
dlai de service est garanti au transpotteur. Les transporteurs ayant rserv une fentre de
temps ont donc un accs prioritaire au terminal par rapport aux transpo tteu rs qui ne 1' ont pas
fait ou qui se sont prsents l'extrieur de la fentre de temps qu ' il leur a t a ll oue. Les
camions qui se prsentent sans rendez-vous ou 1' extri eur de la fentre de temps all oue
s'exposent donc au risque de ne pas tre servi ou d'attendre longtem ps avant d'tre servi.
L ' aide la dcisio n clans ce type de systme provient elu fait que la cration d ' un horaire
permet de planifier les oprations de chargement et de dchargement des transporteurs
routiers. En consquence, le trafic de camions peut tre attnu aux priodes de pointe de la
journe.
4.3.2.3 Automatisation des oprations
L'introduction d' oprations automatises peut avoir un im pact sur les partenaires du terminal.
L'automatisation de la gurite d'accs au terminal ncessite des aj ustements de la part des
transporteurs routiers qui font affaire avec le terminal. Ceux-ci doivent se familiariser avec
les nouve lles directives d' accs au tem1inal. Par contre, le changement sera beaucoup plus
impottant si l'automatisation de la gurite est combine au systme de planification du
stockage de la cour. Dans ce cas, 1' accs au terminal se fera de faon mm tmtser les
remaniements de conteneurs, ce qui a ma un impact sur 1' ordre de priorit des camions sur le
terminal. L'instauration d' un tel systme ncessite donc l' implication des transporteurs
routi ers afin de tenir compte des impacts qu ' il peut avo ir sur ceux-ci.
91
4.3.3 STI et scurit dans les ports
Depuis les vnements du 11 septembre 2001 , la scurit est devenue un enj eu majeur dans
les ports. En effet, les ports sont vus comme une porte d'entre potentielle pour le trafic de
matires illicites ou l' introduction d ' armes de destruction mass ives . C' est pourquoi les
mesures de scurit ont t grandement resserres depuis ces vnements.
Bien que les utilisations des STI prsentes jusqu ' mainten ant taient orientes vers le ct
oprationnel des pmts, les STI prsentent de nombreuses app lications aux problmatiques de
la scurit dans les potis.
Une premire application consiste utiliser des camras de survei llance relies un centre de
contrle. Ces systmes permettent de surveiller les principaux points critiques el u pmi ainsi
que l' tat des points d 'accs fenoviaires et routiers elu port. De plus, en cas d ' incident, les
systmes de surveillance par camras permettent de revenir sur les vnements en vis ionnant
les enregistrements vido . Les systmes de camras de surve illance pourraient auss i tre
coupls des systmes de dclenchement automatique de signaux ou des alarmes su ite
l' identification d 'activits suspectes. Des techno logies s imilaires sont prsentement utilises
pour la dtection d ' incidents sur les routes.
Une des principales craintes en matire de scurit portuaire est l'entre pru infraction
d'individus non-autoriss sur le site du pmi. Le pmt de Vancouver offre un bon exemple de
systme qui peut tre mi s en place pour diminuer ces ri sques. En effet, un systme de cartes
d ' accs et de contrle d 'accs des vhicules est utilis conjointement pour grer les accs sur
Je site du port (Bickel 2006) .
Le systme de ca1tes d ' accs utilise une puce lectronique ou une bande magntique qui
dverroui ll e l' accs aux installations portuaires son titu laire. Pour ce faire des lecteurs
doivent tre installs aux diffrents points d ' entre du pmt. De plus, lorsqu ' une photo du
titulaire de la carte est ajoute sur celle-ci, la carte peut servir de pice d' identification et
ainsi pennettJe une vrification supplmentaire lorsque ncessaire. L ' mission de la catie est
92
faite par l'autorit portuaire et les diffrentes parties prenantes concernes, par exemple les
terminaux et les associations de cami01mage.
Le systme de contrle d'accs des vhicules, quant lui, consiste en des licences d'accs qui
sont m isses par l' autorit portuaire aux transporteurs routiers qui accdent aux diffrents
terminaux du port. Lorsque le camion se prsente une porte d'accs du port, le gardien la
gurite d'entre du port saisie la plaque d' immatriculation du cam ion dans le systme
informatique, qui interroge la base de donnes contena nt les vhicules enregistrs. Si le
numro d' ilru11atriculation est reconnu, l'accs est accord au vhicule; clans le cas contraire
l'accs est refus.
Le systme conjoint mis en place par Je port de Vancouver consiste assoc 1er
l' immatriculation du camion et l'identit du chauffeur de celui-ci, afin de valider l' accs au
terminal. Ainsi, un camion dont J'immatriculation est enregistr dans le systme d'accs des
vhicu les, mais dont l' identit du titulaire de la cmte d'accs n 'est pas associ cette
immatriculation se fera refuser 1'accs au p01t.
Une extension possible cl 'un tel systme consiste automatiser 1' identification des vhicules.
En effet, la mise en place d'un systme de puces intelligentes ou cl' identification des
vhicu les par reconnaissance optique des caractres permettrait
cr acclrer le traitement des
camions l' entre et de faciliter le flux de camions sur le port.
4.4 Futurs STI possibles
La section prcdente prsentait des applications de STI existantes dans certains terminaux
maritimes de conteneurs. Cette section vise prsenter des applications potentielles qui
pourraient tre dveloppes ou qui sont en phase conceptuelle.
Une opportunit de dveloppement de STI provient de 1' intgration de certaines so lutions de
planification et de gestion des terminaux maritimes de conteneurs. En effet, en intgrant des
solutions de planification, les tem1inaux pounaient tre en mesure de coordonner les
oprations et ainsi diminuer la variabilit associe celles-ci .
93
Un premter exemple provient de l'volution d ' un systme d ' horaire de service pour les
transpotieurs routiers. Cette volution consiste coordonner l' horaire avec la planification de
l'entreposage des conteneurs dans la cour. Ainsi, les fentres de temps pour les oprations
des transporteurs routiers sont dtermines de faon minimiser les remaniements de
conteneurs dans la pile et les dplacements des quipements du terminal. Pour ce faire, lors
de la prise de rendez-vous, une fentre de temps est attribue au transporteur pour se
prsenter au terminal, comme dans le cas de la cration d'un horaire de travai l pour les
camions. Afin de minimiser le mouvement des quipements du terminal, la cration de
l'horaire sera faite de faon ce que les transpotieurs attitrs deux conteneurs situs
proximit l' tm de l'autre se prsentent sensiblement au mme moment de !ajourne. De plus,
le fait de donner une fentre de temps, plutt qu ' un rendez-vou s fixe, permet au terminal de
grer l' ordonnancement de l' accs au terminal des camions. De cette faon, l'accs sera
dotm au transp01teur venu chercher un conteneur situ sur le dessus de la pile afin d'viter
une double manutention d 'un mme conteneur.
Ensuite, un second exemple provient de l' intgration encore plus importante des oprations
entre div ers intervenants de la chane de transport. En coordonnant l'ordonnancement des
conteneurs dans la cour avec la planification du chargement des navires ainsi que la
planification et le dploiement du transport terrestTe des conteneurs, les terminaux et les
autres patiies prenantes de cette chane de transport bnficieront d'une plus grande fluidit
des conteneurs travers le rseau de transport. Plus prcisment, un tel systme reprendrait le
concept de coordination de l'horaire des camions avec l'ordonnancement des conteneurs dans
la pile et l'appliquerait plus grande chelle. En effet, cette coordination des activits
permettra de diminuer les remaniements de conteneurs dans les terminaux, puisque la
planification de l'entreposage ainsi que la planification de la livraison et de la rception des
conteneurs se feront de faon simultane. Le principal avantage d'un systme de la sorte est
de diminuer l' incertitude dans la chane de trat1sport des conteneurs et d ' en coordonner les
activits. De plus, la planification du trans pott routier des conteneurs permettrait de niveler le
trafic de cat11ions au terminal et ainsi attnuer le trafic lors des priodes de pointes de la
journe.
94
Un tel systme implique que l'ordonnancement de la pile de conteneurs pour l'exp01tation,
donc les conteneurs charger sur le navire, est fait afin de minimiser les remaniements de
conteneurs lors des oprations de chargement. Pour ce faire , les conteneurs doivent tre
placs dans 1' ordre dans lequel ils seront chargs sur le navire. Par contre, un tel
ordonnancement implique une coordination du dploiement du transport terrestre de
conteneurs, puisque, clans le cas contraire, un nombre important de remaniements de
conteneurs seraient ncessa ires avant l' arrive du navire. Donc, la livrai so n des conteneurs
doit tre faite de manire respecter l'ordre de chargement des conteneurs. Par contre, un tel
systme doit tenir compte du fait qu'on ne peut pas simplement imposer un horaire aux
transporteurs terrestres, c ' est pourquoi le systme devra tre capable de faire voluer le plan
de chargement au cours de la priode de rception des conteneurs, de faon introduire un
lment de flexibilit aux oprations portuaires.
4.5 Mise en contexte des ports de la cte Est canadienne
Maintenant que les STI et les possibilits qu'ils offrent dans les terminaux maritimes de
conteneurs ont t situs d'une faon gnrale, il est possible de revenir l'objectif premier
de ce chapitre, soit de situer les ports de la cte Est canadienne par rapport aux ports elu reste
du monde quant l'utilisation des STI. Par contre, avant de dbuter cette analyse, il importe
de mettre en contexte les ports de la cte Est canadienne, afin de ne pas perdre de vue les
situations paiticulires qui les caractrisent.
Tout d'abord , notons que les pmts concerns sont les ports de Montral et Halifax. Bien que
le pOtt de Saint-John au Nouveau-Brunswick et les ports de Corner Brook et St-John's
Terre-Neuve manutentionnent aussi des conteneurs, ils ne sont pas concerns dans cette
tude. En effet, ces ports desservent soit des marchs spcialiss, clans le premier cas, soit des
marchs locaux, dans le second cas. En consquence, ces ports manutentionnent de faibles
volumes, ce qui limite grandement l' application de systmes de transpott intelligents.
Ensuite, cette mise en contexte vise positionner d'abord les p01ts d 'Amrique du Nord par
rapport aux po1ts du reste du monde. Puis, le contexte des ports de la cte Est nord-
L_ __ _______________________________________________________
95
amricaine sera compare celui des ports de la cte Ouest. Finalement, les contextes
respectifs des potts de Montral et Halifax seront prsents.
4.5.1 Amrique du Nord vs. reste du monde
Les ports d 'Amrique du Nord n' voluent pas dans le mme contexte que les pot1s europens
ou asiatiques. En effet, les grands pmts asiatiques et europens agissent titre de h ub
maritime pour la rgion , tandis que les pmts d'Amrique du Nord constituent plutt des
hubs intennodaux. Ce rle diffrent a un impact important sur l'o rgani sation des
oprations des ports. Dans le premier cas, des navires de tailles importantes amnent de
grandes quantits de conteneurs qui seront ensuite transfrs sur de plus petits navires qui
effectuent la liaison entre le hub et les autres potts de la rgion . Cette situation est
particulirement caractristique des ports de Singapour et Hong Kong qui constituent des
plaques toumantes de leur rgion. En effet, ces deux potts manutentionnent plus de vingt
millions cl 'EVP par anne, mais une infime pattie de ce trafic est destine au march loca l.
Dans le second cas, le transbordement de conteneurs vers de plus petits navires ne constitue
qu ' une faible pati du trafic de conteneurs qui est majoritairement destin au transp01t
fenoviaire et routier.
Des facteurs gographiques peuvent expliquer cette situation. En effet, les principaux centres
de production industrielle de l'Europe et de 1'Asie sont plutt disperss sur le continent. Il y a
donc une ncessit de distribuer les conteneurs vers ces diffrentes zones de production. De
plus, la densit importante de la population rend plus diffic ile l' utili sation de modes de
transpoti terrestres. En effet, cette densit entrane une congestion des rseaux de transport
terrestres. Par exemple, dans le cas de l' Europe, l' utilisation importante du rseau de
transpott ferroviaire pour Je transpott de passagers ne permet pas le transpmt de grands
volumes de conteneurs sur de grandes distances comme il se fait en Amrique du Nord . En ce
qui concerne l' Amrique du Nord , la situation est compltement diffrente, puisque une pmi
impmtante de la production industrielle est concentre autour elu Nord-est et du Midwest des
tats-Unis. Ainsi, les conteneurs doivent tre achemins vers cette rgion depuis les ctes elu
continent. Comme la densit de population est plus faible et que la rgion est enclave au
96
cur du continent, des moyens de transport terrestres doivent tre utili ss pour acheminer les
conteneurs aux centres de production.
4.5.2 Cte Ouest vs. cte Est de l'Amrique du Nord
La situation des ports des ctes Ouest et Est de 1'Amrique du Nord est grandem ent
diffrente. En effet, les premiers desservent principalement le march asiatique, un march en
pleine expansion; tandis que les seconds desservent principalement le march eu ropen, un
march en phase de maturit. En consquence, les potts de la cte Est font face des
augmentations de vo lume moin s impmtantes comparativement aux potts du Pacifique. Donc,
les potts de la cte Est peuvent absorber plus facilement la croissance du trafic de conteneurs,
ce qui n ' est pas le cas de la cte Ouest, o la congestion des terminaux existants a entran le
dveloppement d' un nouveaux terminal au pmt de Prince Rupert. L'entre en fonction de la
premire phase de celui-ci est prvue pour la fin de l' anne 2006 ou le dbut de l' anne 2007,
tandi s que la fin des travaux de la seconde phase est prvue pour 2009. la fin de ce proj et,
on prvoit que le p01t aura la capacit de manutentionner 2 millions d'EVP par anne, mais
selon les prvisions de croissance du march, il est prvu que cette nouvelle capacit sera
insuffi sante. D aux conditions de march grandement diffrentes entre ces deux gro upes de
ports, il a donc t choisi d' exclure les ports de la cte Ouest (plus prci sment le port de
Vancouver) puisqu'ils voluent dan s un contexte diffrent des pmts de la cte Est. De plus,
les limites de temps de cette tude ont constitues un facteur importants dan s le choix des
ports visits.
4.5.3 Montral vs. Halifax
Bien qu'ils s' adressent sensiblement aux mmes marchs, le contexte clans lequel ces deux
pmts voluent est grandement diffrent.
Tout d' abord, la localisation gographique des ports de Montral et Halifax influence le trafic
qui transite par ceux-ci. Dans le cas du port de Montral, celui-ci est un pott dit intrieur, ce
qui signifie qu' il est situ l'intrieur du continent. L ' accs au port se fait via le fleuve SaintLaurent, ce qui limite le tirant d' eau des navires qui le frquente . l' heure actuelle, les plus
97
gros navires qui frquentent le port de Montral ont un e capacit de 4 100 EVP. Par contre, i1
importe de mentionner que ces navires ont t spcialement conus pour la nav igation sur le
fleuve Saint-Laurent, ils sont plus troits et plus longs que les nav ires rguliers, de fao n
diminuer leur tirant d'eau. M is pmt ces navires spciaux, la capacit des plus gros nav ires
rguli ers qui frquentent le poli de Montral l' heure actuell e atte int plus ou mo ins 2 200
EVP . La possibilit de dmnager le pmt de Montra l sur la rive sud du fl euve Saint-La urent
a t voque. Par contre, cette poss ibilit aurait un impact limit sur la ta ille des nav ires qui
pourraient frquenter le pmt , puisque cette relocalisation ne perm ettra it pas d'a ugmenter Je
tirant d' eau des navires qui frquentent le pmt, mais seulement la longueur. En effet, le
principal haut-fond du fleuve Saint-La urent se situe dans le lac Sa int-Pierre situ dans la
rgion de Trois-Rivires. Le dragage d' un fond de cette superfic ie ncess iterait des travaux
maj eurs qui ne sont pas envisags pour l' instant. De so n ct, le port de Ha li fax est un port
ctier, donc directement accessible depuis l' ocan Atlantique. Pui sq u' il s'agit d' un port en
eau profonde, il est en mesure d' accueillir des nav ires de taille plus im posa nte. Les plus gros
pmte-conteneurs qui effectuent des lia isons inclu ant le port de Hali fax atte ignent aujourd 'hui
des capac its allant jusqu ' 5500 EV P. En ce qui concerne le trafic futur de ces polis, la ta ille
des nav ires qui frquenteront le port de Halifax devrait augmenter puisqu ' il s'agit d' un port
en eaux profondes qui peut recevoir les navires de type super post-panamax, soit des navires
dont la capacit excde 6 000 EVP. Dans le cas du port de Montral, il s'avre plus compl exe
de dterminer l' volution future du trafic, puisque l' augmentati on de la taille des navires
ncessite une conception pmiiculire. Il est donc difficil e de prvo ir dans quell e mesure les
transpmieurs maritimes seront prt investir dan s de tels types de nav ires.
Ensuite, la localisation respective des ports a un effet im portant sur le trafic qui les frquente.
En effet, les navires qui s' arrtent au p01t de Montra l effectuent gnralement un seul arrt
sur le continent. En consquence, l'ensemble des oprations de dchargement et de
chargement du porte-conteneurs sont effectues ce p01t. Quant lu i, le port de Ha lifax est
le premier arrt d' une srie de ports, donc les oprations de manutention qui y so nt effectues
concement seulement une partie du chargement du navire. Cette situation a pour effet de
complexifier grandement la gest ion des tem1i naux elu port de Halifax comparativement
Montral. En effet, afin de demeurer comptitifs, les terminaux du p01t doivent tre en
98
mesure de recevoir les navires de type post-panamax, ce qui implique des grues capables de
travailler sur ceux-ci. Par contre, le volume de conteneurs manutentionns au p01t de Halifax
est plus faible que celui de Montral. Pour l'anne 2005, le trafic de conteneurs au p01t de
Montral s'est lev 1 254 560 EVP (P01t de Montral 2006), ce qui reprsentait une hausse
de 2,3% par rapp01t l'anne prcdente, tandis que pour le port de Halifax, ce total s'est
lev 550 462 EVP, pour une hausse de 4,7% par rapport l'anne prcdente. Donc, les
terminaux du premier port se retrouvent avec des dpenses en immobilisations plus
imp01tantes qui sont amo1ties sur des volumes moins importants.
La taille des villes a aussi un impact sur les volumes de conteneurs manutentionns dans leurs
ports respectifs. En effet, la popu lation de la rgion mtropolitaine de Hali fax s' lve 310
000 habitants comparativement la rgion mtropolitaine de Montral qui s'lve prs de 3
000 000 d ' habitants (Statistique Canada, 2006). La premire prsente donc un march local
beaucoup moins important que la seconde. Le po1t de Halifax est donc largement plus
dpendant du trafic destination des tats-Unis que le p01t de Montral.
4.6 Les systmes de transport intelligents dans les ports de la cte Est canadienne
Afin de prsenter l'tat des STI dans les terminaux de la cte Est canadienne, l' ordre de
prsentation utilis sera le mme qu' la section 4.3 , mais les systmes ne seront pas
diffrencis selon qu'ils soient utiliss 1' interne seulement ou non .
4.6.1 Collecte et distribution de l'information
En tennes de collecte et de distribution de 1' information, lors des visites des tenninaux, il a
t constat que l'ensemble de ceux-ci utilise l'change de donnes informatises. En effet,
celle-ci est applique dans ces terminaux pour le transfert d ' informations avec les lignes
maritimes et les transporteurs ferroviaires. En ce qui a trait aux lignes maritimes, les
principales donnes changes sont les plans de chargement des navires et des listes de
chargement des conteneurs sur les trains. En ce qui concerne les transporteurs fenoviaires , les
donnes changes sont principalement les plans de chargement des trains.
99
Ensuite, une autre forme de STI pour la collecte et la distribution des informations qui a t
observe est l' utilisation de systmes de communications informatiques potiables. En effet,
sur les quatre terminaux visits, deux les utilisaient dj, tandis qu 'un troisime prvoyait les
mettre en place prochainement.
4.6.2 Gestion des oprations
Afin de traiter et de grer l'information, trois terminaux sur quatre possdaient un SOT et le
seul terminal qui n'en possdait pas a dj fait l'acquisition du systme et doit le mettre en
place prochainement. Les systmes utiliss, ou en voie d ' utilisation, constituent tous des
solutions commerciales dveloppes l'extrieur de ces term inaux, soit l' un ou l' autre des
deux principaux SOT prsents au chapitre II.
D la mise en place de ces systmes, les terminaux visits utilisaient aussi deux formes de
systmes d'aide la dcision incluent clans ces systmes. En effet, tel que mentionn
auparavant, les SOT comprennent gnralement des modules de planification du chargement
et d'allocation de grues de quai aux navires . Finalement, bien que les SOT utili ss par ces
compagnies offrent la possibilit d ' ajouter des modules de planification de l'entreposage des
conteneurs sur le terminal et d'allocation des tches aux quipements, aucun terminal
n'utilisait ces modules au moment des rencontres .
4.6.3 Automatisation des oprations
Les volumes de conteneurs manutentionns dans les potts de la cte Est canadienne peuvent
difficilement justifier les investissements ncessaires 1'automati sation des oprations. C'est
pourquoi aucun des terminaux visits n ' a automatis ses oprations. Par contre, tous les
dirigeants ont entrepris des dmarches afin d' automatiser les oprations de la gurite du
terminal. En effet, les rcents dveloppements de cette forme d'automatisation ont permis de
rduire les cots d' acquisition de cette technologie. De plus, la gurite a t identifie comme
un goulot d'tranglement important dans la majorit des tenninaux.
100
4.6.4 Les STI dans les autres ports canadiens
Bien qu'il ne fasse pas pmi de l'tude actuelle, le port de Vancouver constitue le port le plus
important du Canada. En tem1es d'EVP manutentionns, les don11es pour l'anne 2005 font
tat de 1,77 millions d'EVP (Vancouver Port Authority 2006). De plus, les donnes
prliminaires de 2006 portent l'administration pmiuaire croire que le volume de conteneurs
pour l' anne 2006 sera suprieur 2 millions d' EVP (Vancouver Pmi Authority 2006). C' est
pourquoi il a t jug pertinent d'inc lure ce1tains commentaires sur celui-ci.
Le pott de Vancouver semble plus avanc que les po1is de la cte Est quant l' utilisation des
STI pour la gestion des oprations des terminaux de conteneurs. En effet, les tro is terminaux
du p01t ont dj automatis les oprations de la gurite d' accs au terminal. De p lus, un des
trois terminaux a rcemment mis en uvre un impoiiant projet de modernisation des
oprations incluant plusieurs implantations de STI.
Parmi celles-ci, l'application de la reconnaissance optique de caractres a t implante sur
de nouvelles grues de quai ainsi que sur les oprations sur les trains. Dans le premier cas, le
conteneur peut tre identifi automatiquement lorsqu ' il est saisi par la grue de quai, ce qui
acclre le temps de traitement de celui-ci en liminant les saisies manuelles auparavant
ncessaires. Dans le second cas, des portails, au bavers desquelles les wagons circulent, sont
installs de chaque ct des voies ferrs du terminal. De cette faon , les numros des
contenems et des wagons sur lesquels ils sont chargs sont enregistrs automatiquement,
limitant ainsi la saisie de dmmes manuelle.
Conjointement l' application de la reconnaissance optique de caractres, un rseau de fibre
optique ainsi qu'un rseau de communication sans fils ont t mis en place dans le terminal
afin de transmettre les donnes recueillies par ces systmes au systme intgr d' oprations
du terminal. De cette faon, l' infonnation recueillie peut tre utilise pour la gestion des
oprations du tenninal.
Ensuite, un systme de positionnement mondial diffrentiel a t mi s en place pour la gestion
des quipements du temnal. En effet, grce ce systme, le termin al est en mesure de
101
connatre en temps rel le niveau d 'essence du vhicule, la pression dans les pneus de celuici, la position de celui-ci sur le terminal ainsi que le dernier mouvement de conteneur
effectu. De plus, un systme d' identification des oprateurs l'intrieur des vhicules
penn et de connatre 1' identit de 1' oprateur de celui-ci. Le systme de positionnement
mondial diffrentiel permet de constituer un tableau de bord des oprations elu terminal par le
suivi des quipements et des conteneurs.
4.6.5 Les STI dans les ports amricains
Les ports canadiens tant f01iement dpendants du trafic de conteneurs destination des
tats-Unis, les ports amricains constituent clone les principaux concurrents des terminaux
maritimes de conteneurs canadiens. Il impolie clone de situer de faon gnrale l' intgration
des STI par les terminaux maritimes de conteneurs des ports amricains.
Puisqu' il a t impossible d'avoir accs de l'information directe de la pa1i des principaux
oprateurs amricains de terminaux maritimes de conteneurs, les principales sources
d'informations utilises ont t les sites web de ces entreprises et des autorits po1iuaires des
principaux ports, soit les ports de Los Angeles/Long Beach, Oakland, Seattle et New Y or!<.
pmiir de ces informations, il peut tre affirm que les ports amricains ont une intgration
des STI l'image de ce qui a t prsent pour le p01i de Vancouver. En effet, deux
oprateurs de terminaux impOiiants ont dvelopp leurs propres SOT et commercialisent ce
systme. Le premier systme est celui dvelopp par la compagnie Tideworks, une filiale de
l'oprateur de terminaux Stevedoring Services of America. Ce dernier est prsent dans les
ports prcdemment mentionns ainsi que dans plusieurs autres po1is des tats-Unis. Tandis
que le second systme a t dvelopp par Maher Terminais Logistic Systems inc., une filiale
du plus important oprateur de terminal du port de New York, la compagnie Maher
Tem1inals inc. Comme dans le cas du terminal du port de Vancouver, ces systmes sont
orients vers le suivi des quipements et des conteneurs, l'aide de tableaux de bord des
oprations. Par contre, il ne semble pas y avoir de module de suggestion ou d' aide la
dcision autre que l' agrgation des donnes oprati01melles du tenninal.
102
Ensuite, pmtir des informations sur les sites web des principaux ports, il a pu tre constat
qu'un grand nombre de ces potts ont automatis les oprations de la gurite d'entre des
terminaux.
4.6.6 Conclusions
la lumire de cette analyse de l'utilisation des STI par les ports de la cte Est canadienne, il
peut tre conclu que l' intgration des STI par ces ports est relativement faible. En effet, ceuxci ont adopt des technologies qui sont tablies depuis longtemps dans les grands ports
europens et asiatiques. Plusieurs raisons peuvent expliquer cette situation.
Tout d'abord, l'espace n'a jamais reprsent et ne reprsente toujours pas un problme
majeur aujourd'hui, bien qu ' il devienne un enjeu de plus en plus important dm1s ces ports. En
effet, historiquement la croissance du volume de conteneurs manutentionns a toujours t
modeste. De plus, cette croissance a t accompagne d' une plu s grande efficience
oprationnelle des tenninaux de manutention de cargo gnral, diminuant ainsi les besoi ns
pour ce type de terminaux, ce qui a permis la conversion de terminaux de manutention de
marchandises gnrales non conteneurises en terminaux de manutention de conteneurs. Les
ports de Montral et Halifax n'ont clone pas t confront aux mmes problmes d' espace
que les p01ts europens et asiatiques, la rponse une augmentation elu volume de conteneurs
manutentionns a donc t gnralement de dvelopper de nouvelles infrastructures ou
d'agrandir les infrastructures existantes. Par contre, cette ral it tend changer. En effet, dans
le cas du port de Montral, les possibilits d'expm1sion des terminaux ont atteint leurs limites
et les dveloppements futurs de terminaux devront passer par la conversion de terminaux
existants ou la construction de nouveaux terminaux. La situation est la mme dans le cas de
Halifax o un terminal se rend la limite d'un espace vert public, tandis que l'autre offre des
possibilits d'expansion limites . Cette situation devrait tre un moteur de changement et
faciliter l' adoption de nouvelles technologies par les terminaux afin d'augmenter la
productivit des infrastructures existantes. C'est d'ailleurs ce qui s'est produit Vancouver,
o la premire phase d'un important plan d'expansion de la capacit du port dans le secteur
du conteneur consistait modemiser les terminaux existants.
103
4.7 Opportunits pour les ports de la cte Est canadienne
La conjoncture actuelle du domaine du transport maritime internationale de conteneurs offre
des opportunits intressantes pour les pmts de la cte Est canadienne. En effet, certaines
opportunits ne proviennent pas directement des STI, mais il n'y a aucun doute que les STT
auront un rle important jouer pour saisir ces opportun its.
4.7.1 Opportunits provenant des STI
Suite la prsentation des diverses utilisations actuelles et potentielles des STI dans les
tenninaux p01tuaires de conteneurs, il peut en tre dduit certaines opportunits pour les po1ts
de la cte Est canadienne. L'objectif n' est pas d' identifier prcisment quels systmes
auraient le plus grand impact sur la productivit des ports, mais bien quel serait l' impact
gnral cl ' une plus grande ouve1ture 1' utilisation de ces systmes clans les ports canadiens .
Tout d'abord, par la visibilit et la fluidit accrue des conteneurs qu ' ils obtiennent, les
terminaux qui mettent en place des STI peuvent diminuer le temps quai des navires. Cette
diminution constitue
w1
avantage comptitif important pour ces terminaux, puisque les li gnes
maritimes accordent une grande impo1tance celui-ci. E n effet, lorsqu ' ils ne sont pas en mer,
les navires ne gnrent pas de revenus pour leurs proprita ires, c'est pourquoi ceux-ci
cherchent minimiser le temps quai de leurs navires.
Ensuite, les STI petmettent d'amliorer l'efficience oprationnelle des terminaux maritimes
de conteneurs, donc, par le fait mme, ils permettent une meilleure gestion des actifs. Cette
plus grande efficience oprationnelle est obtenue en diminuant les dplacements inutiles des
quipements et les remaniements de conteneurs, ainsi qu ' en augmentant la visibilit des
conteneurs sur le terminal. En consquence, les quipements de manutention du terminal sont
en mesure d'effectuer un nombre plus impmtant de mouvements de conteneurs valeur
ajout, pe1mettant ainsi une meilleure gestion des actifs.
104
4.7.2 Opportunits provenant de la conjoncture internationale
Tel que mentioru1 au premier chapitre de cet ouvrage, les routes de transport ont t
grandement modifies par l'apparition de navires de plus en plus gros pour les services entre
l' Asie et l'Amrique. Par contre, peu importe la taille des navires utiliss sur la cte Ouest,
un fait demeure, les ports de la cte Ouest de l'Amrique du Nord sont saturs et les
prvisions de croissance du trafic dans les pmts de cette rgion ne portent pas croire que
cette situation est sur le point de s'estomper (par exemple, il est prvu que le trafic triplera au
cours des quinze prochaines annes au port de Vancouver pour atteindre 5 millions d' EVP en
2020 (Vancouver Port Authority 2006)).
De plus, au cours des prochaines annes, les nouveaux navires prsentement en constructi on
pour le transport de conteneurs sur l' ocan Pacifique seront livrs, ce qui implique qu e l'on
assistera un important transfert de navires vers les autres routes internationales. En effet, la
mise en service de nouveaux navires de tailles plus impo1tantes suit un mod le en cascade.
Concrtement, le phnomne se droule de la faon suivante. Les nouveaux navires, de taille
plus impmtante, sont mis en service sur les routes entre 1' Asie et la cte Ouest de 1' Amr ique
du Nord. Les navires qui opraient sur ces routes sont transfr vers des routes moins
importantes, afin d' augmenter la capacit sur ces routes et de diminuer les cots unitaires de
transpmt des conteneurs. Les navires qui opraient sur cette seconde route sont ensu ite
transfrer vers une autre route moins importante et ainsi de suite, jusqu ' au dernier niveau o
les navires les plus anciens sont remplacs par des plus rcents qui sont gnralement plus
efficaces. En effet, en plus d' offrir une plus grande capacit de transport, les nouveaux
navires sont gnralement plus conomiques en termes de carburant et diminuent les frais
d'entretien dus l'usure des navires.
partir des deux constatations prcdentes, soit une saturation des ports de la cte Ouest
combine une augmentation du trafic et la livraison de nouveaux navires pour les routes
de l'Asie, un constat s'impose : de nouvelles routes pour le transport maritime intemational
de conteneurs entre l' Asie et l' Amrique sont ncessaires. Voyons cettaines des possibilits
qui s'offrent aux lignes maritimes.
105
Tout d' abord, un retour vers le canal de Panama pourrait tre envisag. Par contre, cette
possibilit pose cetiains problmes. Tout d' abord, la taille des navires qui empruntent le canal
est limite, ce qui implique un e augmentation des cots unitaires de transport, donc une
augmentation du cot de transport des conteneurs. De plus, l'heure actue lle le canal de
Panama est dj grandement utilis, clone, jusqu ' quel point peut-il suppotier un trafic de
navires plus impotiant? La possibilit d'agrandir le canal de Panama a t voqu, mais la
dcision finale n'a toujours pas t prise. En effet, la constitution elu Panama ob li ge le pays
consulter la population pour tout projet d' agrandissement du canal. Le rfrendum est prvu
pour le mois d'octobre 2006 ( www.acp.gob.pa ). De plus, si la population approuve le projet,
le plan d'agrandissement du canal prvoit que les travaux s'cbelonnerontjusqu ' 2014.
Ensuite, une seconde possibilit, qui est souvent voque depuis qu elques annes, est
l' utilisation du passage du Nord. Cette route, gui est l'heure actuelle impraticable,
consisterait utiliser des navires coques renforces, pour la nav igation dan s les glaces, pour
atteindre la cte Est de l'Amrique en tran sitant par l'ocan Arctique au Nord du Ca nada. Par
contre, cette route est, l' heure actuelle, impraticable du e l'paisse ur des glaces gui la
recouvre. Cependant, le rchauffement de la plante a pour effet de rduire l' paisseur des
glaces et cette voie de navigation pourrait devenir praticable dans quelques annes.
Finalement, la demire possibilit pour les lignes de transpoti maritime consiste utiliser le
canal de Suez pour le transpmi de l' Asie jusqu ' la cte Est de l'Amrique du Nord. Cette
possibilit l' avantage de permettre l' utilisation de navires de taille plus impotiante que la
route via le canal de Panama et prsente des temps de transit de seulement trois j ours de plus
gue les routes du Pacifique. Cette route est d'ailleurs dj utilise par certains tran sporteurs.
En effet, le leader mondial du transport maritime de conteneurs, la compagnie danoise
Maersk, utilise des navires d' une capacit de 5 500 EVP pour le service MECL 2 qui visite
deux potis d'Asie, trois potis de la Mditerrane et trois potis de la cte Est d' Amrique du
Nord, dont le port de Halifax.
En comparant ces trois routes potentielles, il ressort que la route utilisant le canal de Suez
offre les meilleures opportunits de dveloppement de routes alternatives. Bien que le
106
dve loppement du passage du Nord pourrait compltement transformer le transpmt maritime
international, cette route n' est prsentement pas praticable, donc elle ne constitue pas une
alternative viab le pour le transport de conteneurs entre l' Asie et l' Amrique du Nord po ur
l' instant. Par contre, un constat s' impose quant aux pmts de la cte Est canadienne. Peu
impolie laquelle des deux routes est uti lise, ces ports co nstituent les prem iers po rts sur ces
routes, que ce soit par le canal de Suez ou par le passage du Nord. Donc, les ports de la cte
Est canadienne sont clans une position idale pour saisir des opportunits cie cro issa nce
importantes.
4.7.3 Dveloppement de la porte d'accs de l'Atlantique (Atlantic Gateway)
La sous-section 4.7.2 a mis en vidence les avantages des potts de la cte Est canad ien ne
provenant de leur situation gographique. partir de ce constat, une question s' impose : quel
est le lien de cette situation gographique avec l'uti lisation des STI dans les ports? Bien
qu' impmtante, la situation gographi que n'est pas la seu le tributa ire de la saisie de cette
oppmtunit . En effet, une large pa1t du trafic qui transiterait par les ports de la cte Est
canadienne serait destin au march des tats-Unis. Donc, afin de saisir cette opportunit, les
ports de Halifax et Montral doivent s'assurer d'offrir des flux de conteneurs efficients vers
ces destinations, peu importe le mode cie transport uti li s. C' est ce niveau que les STI ont
un rle important jouer.
Le concept de pmie d' accs (gateway) repose sur un princ ipe de coordination des politiques
et des activits en matire de transport pour une rgion donne. P lus prcisment, l'o bjectif
est de considrer le rseau de transpo1t de cette rgion comme un tout plutt qu' une somme
de pa1ties. De cette faon, le dveloppement du rseau est fait de faon assurer son
efficience oprationnelle et sa comptitivit par rapport aux rgions concurrentes. Ce concept
a t utilis dans l' Ouest du Canada pour constituer la porte d' accs du Pacifique (Pacifie
Gateway) dans le but de saisir une part impo1tante du trafic asiatique en direction de
l'Amrique du Nord . Concrtement, la pmte d'accs du Pacifique s'est matrialise en une
suite d ' investissements dans le port de Vancouver, le rseau ferroviaire, le rseau routier et
les STI (Ministre des transports du Canada 2006).
107
l' image de ce qui a t dvelopp sur la cte Ouest canadienne, une po1ie d' accs de
l'Atlantiqu e pourrait tre dveloppe sur la cte Est. Par contre, afi n d'tre rellement
efficace, cel le-ci do it tre dveloppe avec une forte ori entati on vers les STI. En effet, ceuxci sont la cl d ' une coordination des activits de la po1ie d'accs et de ses diffrents
intervenants, soit les ports et leurs terminaux respectifs, les li gnes maritimes et les
transporteurs terrestres (ferrovia ires et routiers). De plus, l' utilisation des STI est ncessaire
afin d'assurer la comptitivit des ports canadiens par rapport aux po1is am ri cains. Cette
comptitivit accrue proviendrait des avantages procurs par les STI qui ont t prse nts la
sous-section 4.7 .1.
4.8 Conclusion
Tel qu ' il a pu tre constat, l' adoption des STI par les po1is de la cte Est canadienne,
l' image du reste de l'Amrique du Nord , est relativement limite. Po urtant, la combinaison
de la saturation des ports de la cte Ouest elu continent et de la situation gographique de ces
po1is offrent des oppo1iunits intressantes de dveloppement de march . Par contre, afin de
saisir ces opportunits les pmis de la cte Est canad ienne ainsi que l' ensembl e des pa1iies
prenantes concernes par les activits de ces po1is doivent faciliter et encourager le
dveloppement et la mise en place de STI et de systme d'a ide la dci sion pour la
planification et la gestion des oprations du terminal. Dans cet ordre d'ide, les chapitres
suivants prsentent un e app lication de ce type de techno logie. Le chapitre suivant prsente la
reprsentation logique des activits d' un terminal qui sera utili se subsqu emment pour le
dveloppement d' un simulateur des oprations d'un terminal mar itime de conteneurs.
CHAPITRE V
DESIGN D 'UN SIMULATEUR DES OPRATI ONS D 'UN TERMINAL MARITIME DE
CONTENEURS
Le chapitre prcdent a dmontr les types de systmes de transport intelligents qui peuvent
tre utiliss afin de faciliter la planification et la gestion des terminaux maritimes de
conteneurs. Ce chapitre constitue un e premire tape vers la mi se en place de systmes de
transport intelligents . Plus prcisment, l' objectif est de prsenter le design retenu pour le
dveloppement d' une simulation des oprations d' un termina l maritime de co nten eurs. Dans
un premier temps, la section 5.1 explique le choix de 1' outil et la mthodologie gnra le
utilise. Un court rappel de la littrature sur le sujet est aussi inclus. En 5.2, l'approche
utilise pour le design du simulateur est prsente. La section 5.3 dtaill e les divers niveaux
de la simulati on, tandis que la section 5.4 prsente Je design dtaill de la simulation et de ses
composants.
5.1 Simulation de terminaux portuaires de conteneurs et mthodologie gnrale
Tel que mentionn en introduction, il a t cho isi de dve lopper une simul ation des
oprations d' un terminal portuaire de conteneurs. La simulation a t choisie, car le
dveloppement d' un tel outil requiert une comprhension approfondie des oprations d' un
tem1inal, ce qui s' inscrit dans la ligne directrice de ce mmoire. De plus, tel qu ' il a t
constat au chapitre prcdent, le niveau d' intgration des technologies d'aide la dcision
par les terminaux portuaires canadiens est relativement faible. La simulation constitue donc
un premier pas logique vers l' intgration de systmes d'aide la dcision oprationnels,
puisqu'elle permet de dmontrer la reprsentativit de tels systmes. En effet, en reprsentant
les oprations du terminal tel qu 'elles sont, dans un premier temps, la simulation permet une
transition plus fluide vers la mise en place de systmes de transp01i intelligents plus grande
chelle. De plus, la simulation constitue un outil d'analyse et d' valuations de politiques
oprationnelles . Ainsi, le simulateur dvelopp pounait tre utilis pour valuer l'impact des
STI sur la performance oprationnelle du terminal.
109
5.1.1 Applications existantes de la simulation aux terminaux maritimes de conteneurs
La simulation a t applique dans divers buts aux terminaux maritimes de conteneurs . Une
des premires applications est celle de Ramani (1996) qui prsente un e simulation pour la
planification du dveloppement de tenninaux maritimes de conteneurs. Dans le mme ordre
d'ide, Liu et col. (2000, 2002) prsentent des simulations de terminaux automatiss, dans le
but de dtemner quel type d'automatisation des oprations permet d 'obtenir la meilleure
efficience oprationnelle. Une simulation comparant un terminal utili sant des vhicules de
transpmt guids automatiquement un tem1inal utilisant des chariots cavaliers automatiss a
t dveloppe par Vis et Harika (2004). Plusieurs s imulateurs ont t dvelopps par un
groupe de chercheurs de 1' universit technologique de Delft (voir : Duinkerken et col. 1996,
2000, 2001; Evers, Koppers 1996 et Ottjes et co l. 1996). Ces simulateurs visaient
principalement valuer divers modes d'organisation des oprations de transpmt inter
terminaux pour le port de Rotterdam en Hollande.
Une approche de simulation diffrente a t utilise par Alessanclri, Sacone et Siri (2004), qui
reprsentent les conteneurs et leurs mouvements par des files d ' attentes. Ces files d ' attentes
reprsentent le travail effectuer par les diffrentes ressources du terminal. Les activits de
transfe1t de ces ressources sont reprsentes par des quations de temps discrets (disoete-
time equations) et l'volution dynamique des diffrentes files d ' attentes dpend de
l' utilisation des ressources du terminal. Au niveau elu design elu terminal, cette mthode a
l'avantage de faciliter la variation de la capacit du terminal par une simple modification de
cette variable.
5.1.2 Envergure de la simulation
Avant d'entrer dans quelques considrations mthodologiques que se soit, il impmte de
dfinir l' envergure de la simulation. Par envergure, il est ici entendu le niveau de dtail
dsir. Dans le cas prsent, la simulation qui sera dveloppe se placera d'un point de vue
macro. En effet, l' objectif de cette simulation est d ' avoir une vue d'ensemble des oprations
du terminal, afin d ' observer l' ensemble de celui-ci, comparativement un point de vue
110
micro, qui observerait le comportement d' une partie prcise du systme. Par exemple,
l'ensemble des travaux du groupe de chercheurs de l' universit technologique de Delft (voir
section 5.1.1) sur le transport inter terminaux au port de Rotterdam .
5.1.3 Mthodologie
Le dveloppement d'un modle de simulation des oprations d'un termin al maritime de
conteneurs, comme tout dveloppement de systme, requiert une ligne directri ce pour la
gestion des tches de dveloppement. Afin de structurer ce processus, le modle de
dveloppement de logiciels de Kececi et Modarres (1998) a t retenu (voir figure 5.1 ).
Figure 5.1 Modle de dveloppement d' un logiciel (Kececi et Modarres, 1998)
Selon ce modle, l'objectif final est progressivement analys et prcis chacune des phases
de dveloppement, selon les objectifs et les contraintes de celles-ci. En consquence, une
cohrence est assure chacune des phases du dveloppement. Par contre, l'ensemble des
phases ne s'appl ique pas ncessairement au prsent projet. En effet, les deux dernires
Ill
phases, soit l'installation (Installation) et l'entretien (Maintenance), ne seront pas
considres, puisque la simulation dveloppe ne sera pas implante dans un terminal dans le
cadre de ce travail. Ce chapitre se concentrera sur les trois premires phases (Planning,
Requirements, Design), tandis que les chapitres suivants se concentreront sur les trois autres
(Implementation, Integration, Validation) .
5.2 Design gnral du simulateur
L'approche retenue pour le dveloppement du simulate ur s'i nsp ire de celle utilise par
Alessandri, Sacone et Siri (2004). En effet, le tenninal est reprsent comme une suite de
files d' attentes pour l' accs aux ressources du terminal. Ainsi , les conteneurs arrivent au
tenninal par navires, par trains et par camions et cheminent travers le terminal en passant
d'une file d'attente l'autre. La figure 5.2 prsente cette reprsentation des activits d' un
terminal maritime de conteneurs.
Les blocs Al, A2 et A3 reprsentent les taux d'arrives des navires, trains et camions; tandis
que les blocs Dl, D2 et D3 reprsentent les taux de dpart de ces mmes modes de transport.
Le bloc Ql reprsente la file d'attente pour un quai, tandis que le bloc Q2 reprsente la fi le
d'attente pour les grues de quai. Les blocs Q3 et Q4 situs l' intrieur de la zone de stockage
correspondent aux files d'attente pom le transfert des conteneurs vers la pile (Q3) et pour le
transfert des conteneurs depuis l'inventaire de conteneurs du terminal vers les autres modes
de transport (Q4). Fait impottant noter, les ressources utilises pour les blocs Q3 et Q4 sont
les mmes, mais les files d'attente ont t spares sur le schma afin de reprsenter la suite
logique des oprations par les flches entre les blocs qui indiquent les flux de conteneurs
l' intrieur du terminal. Les blocs QS et Q6 reprsentent les oprations de dchargement (QS)
et de chargement des trains (Q6) . Finalement, les blocs Q7 et Q8 reprsentent les fles
d'attente de la gurite du terminal pour l' entre et la sortie des camions. Aucune file d' attente
ne reprsente le chargement et le dchargement des camions, puisque ces oprations font
patties des blocs Q3 et Q4.
112
Figure 5.2 Reprsentation d'un terminal maritime de conteneurs comme une suite de fil es d'attente.
Puisqu ' il s' agit d' une premire version d' un simulateur des oprations d' un terminal
maritime de conteneurs, certains postulats ont t poss afin de limiter l'envergure du
simulateur. Tout d' abord, le nombre de vhicu les de transport interne est considr comme
infini. En effet, sans ce postulat, la simulation ncessite une vi sion micro des oprations,
tandis que l'tude actuelle s'i nscrit dans une perspective macro des oprations du terminal.
Ensuite, puisqu'il s'agit de la forme d'organisation des oprations la plus rpandue, il est
postul que le terminal utilise un systme de transfert indirect utilisant des ponts roulants sur
pneumatiques et/ou des chariots prise par Je haut. Pour une dfinition des diffrents types
d'organisation des oprations, le lecteur peut se rfrer la section 1.4.2 du chapitre 1. De
plus, il a t postul que tous les camions qui se prsentent arrivent chargs d'un conteneur et
qu'ils chargent un autre conteneur avant de repartir du terminal. Ce postulat permet de
simplifier la gnration des arrives de camions au terminal et le traitement de ceux-ci
l' intrieur du terminal simul. Bien qu'il est prvu que ce postulat ait un impact sur les
rsultats du simulateur, cet impact ne devrait pas tre majeur, puisque ce postulat s'avre, en
ralit, vrai pour une majorit de camions qui se prsentent au terminal. En effet, les
113
transporteurs routiers ont l' habitude de prvoir un chargement de retour lorsqu' ils se
prsentent au terminal, afin de maximi ser les revenus du dplacement jusqu'au terminal.
5.3 Niveaux de la simulation
Bien que le design propos s'oriente principalement vers la simulation des oprations
physiques du terminal, ce1tains aspects dcisi01mels ne peuvent tre ignors. C'est pourquoi
deux niveaux de simulation peuvent tre distingus. Le premier niveau est l'oprationnel.
Celui-ci a pour objectif de reprsenter les mouvements physiques des conteneurs, des
quipements et des modes de transpmt impliqus dans les oprations d' un terminal maritime
de conteneurs. l'oppos, le niveau dcisionnel a pour objectif de reprsenter les dcisions
des gestionnaires en ce qui concerne l' allocation des ressources du terminal. Ce niveau
comprend donc des sous-modles d'affectation des grues de quai et des serveurs elu terminal.
noter que le terme serveur fait ici rfrence aux ponts roulants sur pneumatique, aux
chariots prise par le haut et tout autre quipement qui peut tre utilis pour la manutention
des conteneurs sur le tenninal.
5.4 Modles et sous-modles du design d'un simulateur de terminal maritime de
conteneurs
La conceptualisation gnrale de la simulation et les niveaux de celle-ci tant dfini s, l'tape
suivante consiste prciser la logique de chacun des sous-modles qui composent le
simulateur. Bien que ce design se veuille le plus gnral possib le, ce1tains des sous- modles
comportent des dcisions spcifiques au terminal qui sera utilis pour l' implantation du
simulateur. Cette situation est due l' impossibilit de gnraliser le design dans ces cas. Les
diffrents sous-modles, prsents dans les pages qui suivent, ont t dvelopps en se basant
sur les diagrammes des processus opratimmels prsents au chapitre III. De plus, les
discussions avec les dirigeants du terminal utilis comme tude de cas pour l'implantation ont
permis de dvelopper les politiques dcisiotmelles d' allocation de la capacit (grues de quai,
ponts roulants sur pneumatiques, chariots prise par le haut). Une description dtaille de ce
terminal sera fournie pralablement la prsentation de l' implantation. Pour le moment,
retenons qu'il s'agit d 'un terminal du p01i de Montral, qui possde trois grues de quai et qui
- -
114
utilise un systme de transfert indirect qui comprend des ponts roulants sur pneumatiques et
des chariots prise par le haut. De plus, le terminal a un client principal qui exploite deux
lignes rgulires qui relient 1'Europe et 1' Amrique centrale Montral. La capacit des
navires sur ces lignes n'est pas la mme, ce qui cre certaines diffrences dans la gestion des
oprations de ces deux lignes.
Arrive d'un
navire
A~
File d'attente quai
Procoosus
Navire saisit q u~:~i
chargement
Processus
Processus
allocation
grue(s) de
GUai
allocation
serveur(s)
navires
export
Processus
allocation
serveur(s)
navir
import
Processus
dchargement
Navire libre
g ru e(s) e!
sarveur(:s)
Navire libre qua1
Dpart du
na\~ re
Figure 5.3 Arrive des navires
5.4.1 Modle d'arrive des navires
Tout d' abord, le navire se prsente au terminal et un quai doit lui tre assign. Si un quai est
disponible, le navire saisit le quai, qui ne peut plus tre saisit par un autre navire. Dans le cas
contraire, le navire doit se placer dans une file d'attente jusqu ' ce qu ' un quai se libre.
Ensuite, le processus d'allocation de grue de quai dtermine combien de grues seront
assignes au navire. Ce processus fournit l' intrant au processus d' allocation de serveurs pour
le dchargement du navire (import) et une fois les serveurs allous, le dchargement du
navire dmarre. Lorsque ce processus est complt, les serveurs sont librs et une
rallocation de ceux-ci se fait pour le processus de chargement du navire, puisque la quantit
115
de serveurs ncessaires pour ces oprations n 'est pas ncessairement la mme qu ' au
dchargement. Le navire est ensuite charg et une fois ce process us complt, les grues de
quai , les serveurs et le quai sont librs et le navire quitte le terminal.
5.4.2 Sous-modle d'allocation des grues de quai
Le premier sous-modle du modle d'arrive des navires au terminal est le process us
d' allocation des grues de quai qui est reprsent la figure 5.4.
Arrlv~des
navires
Saisie des
plans de
ro(l\enaurs
Demande 3 grues
Cof111araison
charge de traval
des deux navires
Allocation d&s
grues au navire
Demande 2 grues
Oui
Allocation des
grues au navire
Allocation 2 grues
nouveau nevire. 1
gruean~n
AJiocatiOf'l 1 grue
nouveau t1avlre, 2
grues ancien
Figure 5.4 Processus d' allocation des grues de quai
Une fois que le navire est amarr un quai, les plans de dchargement et de chargement des
navires sont saisis, afin de dterminer la charge de travail totale du navire. Ensuite, selon la
ligne sur laquelle le navire opre le nombre de grues demandes sera diffrent. En effet, la
taille des navires, sur une des deux lignes qui frquentent le terminal utilis pour
116
l' imp lantation de la simulation, permet d'utiliser trois grues de faon simultane sur un seul
navire; tandis que les navires de l'autre ligne peuvent seulement utiliser deux grues d aux
risques d' interfrences entre celles-ci. Dans les cas o la quantit de grues requise est
disponible, elles sont alloues au navire et la simulation passe au sous-modle suivant. Dans
les cas contraires, la charge de travail restante des deux navires est compare et deux grues
sont alloues au navire ayant la charge restante la plus importante et une grue est alloue
1'autre navire. Le nombre total de grues alloues ne peut tre suprieur trois, puisque le
terminal uti lis pour 1' implantation de la simulation possde ce nombre de grues.
5.4.3 Sous-modle d'allocation des serveurs pour le dchargement des navites
Lorsque le nombre de grues de quai alloues au navire a t dterm in, le nombre de serveurs
ncessaires pour le transfert des conteneurs dans les piles de la zone de stockage peut tre
dtennin. Dans les cas o une seule grue est alloue au navire, deux ponts roulants sur
pneumatiques (PRP) et deux chariots prise par le haut (CPH) sont uti liss pour manipu ler
les conteneurs dans la cour. Dans les cas o deux grues sont alloues au navire, tro is units de
chacun des types d'quipement seront ncessaires et clans les cas o trois grues sont al loues
au navire le nombre de serveurs sera de huit, soit quatre ponts roulants sur pneumatiques et
quatre chariots prise par le haut. Dans l'ventualit o le nombre de serveurs requis n ' est
pas disponible, la simulation procde au sous-modle de rallocation des serveurs aux
navires. La figure 5.5 illustre le sous-modle elu processus d' a llocation des serveurs pour le
dchargement des navires.
117
Processus
allocation des
grues de quai
/\justement
Inventaire f'RF
&tCPH
Oematide 2
PRPei2CPH
Ajustement
lnV'elltaire FRF
et CPH
Demande 3
PRP et 3 CPH
Oemande4
PRF et4
CPH
Ajustement
invenlaire PRP
etCPH
Allocation da 2
Allocation da 3
PRPe!2CPH
PRPet3CPH
Allocation de 4
PRP et 4 CPH
Non
NOfl
Proeswsde
rQallocatlon
desPRPe!
CPH aux
navires
Figure 5.5 Processus d'allocation des serveurs pour le dchargement des nav ires
5.4.4 Sous-modle du processus de dchargement des navires
Suite aux divers processus d'allocation des quipements, la simulation procde au sousmodle du processus de dchargement des navires (fi gure 5.6). La premire tape de celui-ci
consiste la saisie du plan de conteneurs imports . Ensuite, le premier conteneur est
dcharg et transport jusqu ' la pile de la zone de stockage du terminal. Suite ce transport,
la disponibilit du serveur pour le transfert du conteneur dan s la pile est inspecte. Si le
serveur est disponible, le conteneur est transfr et 1' inventaire de conteneurs du terminal est
ajust. Dans le cas contraire, le conteneur se place dans la file d'attente du serveur. chaque
conteneur qui est dcharg du navire, la condition de fin du processus de dchargement est
vrifie. Lorsque cette condition est vraie, les serveurs sont relchs et le processus
d' allocation de serveurs pour le chargement des navires se met en branle.
118
Processus
allocation
serveur(s)
navls
impori
Saisie du plan
oonteneurs
if1"4Klfls
{dchargement)
File d;atle<lte
S(!M;!{Jr$ nallira
Ajustement de
l'inventaire de
contooeurn de la
cour
Figure 5.6 Processus de dchargement des navires
5.4.5 Sous-modle d'allocation des serveurs pour le chargement des navires
La logique du processus d' allocation des serveurs pour Je chargement des navires est la
mme que celle utilise pour l' allocation des serveurs au dchargement des navires. Par
contre, Je nombre de serveurs requis ne sera pas Je mme. En effet, lorsqu ' une seule grue est
alloue au navire, un seul chariot prise par Je haut est ncessaire, tandis que deux grues
ncessitent deux chariots prise par Je haut et trois grues en ncessitent quatre, tel qu'il peut
tre constat sur la figure 5.7.
119
Dchargement
des navlres
Serveur:; allous
pour imp<xt soot
li brs
Demande 1
Demande 4
CPH
CPH
Non
Processus de
rallocation
des PRP !!t
des CPH aux
navires
Figure 5.7 Processus d' allocation des serveurs pour le chargement des navires
5.4.6 Sous-modle du processus de chargement des navires
Le processus de chargement des navires dbute avec la saisie du plan de conteneurs exports.
Une fois le nombre de conteneurs charger connu, le premier conteneur vrifie la
disponibilit du serveur la pile de conteneurs charger. S' il est libre, le serveur extrait le
conteneur de la pile et le conteneur est ensuite transport vers la grue de quai. S' il n'est pas
disponible, le conteneur est maintenu dans la file d ' attente pour le serveur. Lorsque les
conteneurs sont extraits de la pile, 1' inventaire de conteneurs du terminal est ajust pour
dduire les conteneurs qui sont chargs sur le navire. Suite au transport du conteneur, celui-ci
est charg sur le navire par la grue de quai si elle est libre, ou il est maintenu dans la file
d' attente si la grue est occupe charger un autre conteneur. Lorsqu ' un conteneur est charg
sur le navire, la condition de fin du processus de chargement est interroge. Si elle s' avre
fausse, le processus se poursuit, tandis que si elle s'avre vraie le processus se termine, les
120
grues de quai et les serveurs sont relchs et le navire retourne au modle d'arriv des navires
o le quai est relch et le navire quitte le terminal. Le sous-modle prcdemment dcrit est
reprsent par la figure 5.8.
Processus
ailocation
serveurs
na l'ires
e~port
Sal!:la plan
COilleneurs
exports
(chargement)
File
d'~lUanta
serveur navire
co"teneurs de
la cour
File d'attente
d.atgemenl sur
navire
Ajus!emeril
Inventaire
PRPe1CPH
Figure 5.8 Processus de chargement des navires
5.4.7 Sous-modle du processus de dchargement des trains
Les sous-modles prcdents prsentaient les divers processus dcisionnels et oprationnels
lis l'arrive d' un navire un terminal maritime de conteneurs. Les prochains sous-modles
121
prsente les divers processus lis l'arriv de trains au terminal. La figure 5.9 schmatise la
logique du sous-modle de dchargement d' un train.
Process\JS
Arrive du
train
d'allocatiCll1
des ~rveurs
Saisie plan
C)QI'l!llnalJfll
exports
(dchargement)
Noo
Fila d'a!tante
dcr.argement
Non
Processus
File d'attente
serveur train
cl\argernerll
train
Ajustement de
l'inventaire de
conteneurs de la
oou r
Figure 5.9 Processus de dchargement des trains
Le sous-modle dbute avec l'arrive d'un train. Celle-ci dclenche le processus d'allocation
des serveurs aux trains. Une fois les serveurs allous, le plan des conteneurs dcharger
(export) est saisi. Ensuite, les conteneurs chargs sur le train vrifient la disponibilit des
serveurs. Si un serveur est disponible, le conteneur est dcharg et il est transport vers la pile
dans la zone de stockage du terminal. Si aucun serveur n'est disponible, le conteneur se place
dans la file d' attente. Une fois transport jusqu ' la pile, le conteneur est transfr dans celleci par un serveur situ prs de la pile. Par contre, il se peut que le serveur soit dj occup
transfrer un autre conteneur. Dans ces cas, le conteneur est maintenu dans une file d' attente,
jusqu ' ce que le serveur soit disponible. Ensuite, l' inventaire de conteneur du terminal est
augment d' une unit supplmentaire. chaque dchargement d' un conteneur, la condition
122
de fin du processus de dchargement des trains est vrifie et lorsqu'elle s' avre vraie, le
processus prend fin et le processus de chargement des trains dbute.
5.4.8 Sous-modle du processus de chargement des trains
La figure 5.10 illustre le processus de chargement des trains. Ce processus dbute avec la
saisie du plan de chargement des conteneurs (impott). Par la suite, le serveur a ll ou la pile
de contenems extrait un conteneur de la pile et celui -ci est transport jusqu ' au train. Les
autres conteneurs charger sont placs dans une file d'attente pour la disponibilit du
serveur. Une fois qu ' il est achemin au train, le conteneur est charg sur le train par un
serveur allou au chargement de celui-ci ou, s' il n' est pas disponible, plac dans une file
d' attente. Lorsque Je conteneur est charg, la condition de fin du processus de chargement
des trains est vrifie et si le processus est termin, les quipements utiliss pour le
dchargement et le chargement sont librs et le train quitte le terminal.
123
Processus
ddlargemenl
1rah1
Saisie plan
conteneurs
in~s
(chargement)
File d'attente
dd1argenl(!l1\
Dpan du
!min
Ajustement
inventaire
PRPelCPH
Figure 5.10 Processus de chargement des trains
5.4.9 Sous-modle d'allocation des serveurs aux trains
Le processus d 'allocation des serveurs aux trains dbute lorsque les plans de dchargement et
de chargement des conteneurs du train sont saisis. En effet, lorsqu ' il s sont saisis deux ponts
roulants sur pneumatique sont rservs pour les oprations sur les trains, tandis que deux
chariots prise par le haut sont ncessaires pour le transfert des conteneurs dans la pile. Si les
quipements sont disponibles, ils sont all ous aux oprations des trains, sinon le processus de
rallocation des serveurs aux trains s'amorce. La figure qui suit (5.11) reprsente le processus
d' allocation des serveurs aux trains.
124
Dechargement/
charuement des
trains
t
Demande 2 PRP
et 2CPH
Noo
ispoot>les?
Rallotion
des seJVeurs
.au train
Oui
Ajustemfll
Inventaire PRP et
CPH
Allocation de 2
PRP et 2 CPH au
train
Dctw>Jernent
/cllarg<l~t
trains
Figure 5.11 Processus d' allocation des serveurs aux trains
5.4.10 Sous-modle du processus de dchargement des camions
Tout co mme les arrivs de navires, l'arriv de camions au terminal dclenche une s uite de
processus. Le premier de ceux-ci est le processus de dchargement des camions. Celui-ci
dbute avec l'arriv du camion la gurite du terminal. Lorsque la gurite est di sponible, le
camion est trait et se dirige ensuite vers la pile de conteneurs, dans la zone de stockage, pour
tre dcharg. Lorsqu'elle n' est pas disponib le, car utili se par un autre camion, le camion se
place dans la fi le d'attente pour l'accs au terminal. Une fois que le camion est rendu la
pile, un serveur dcharge le camion et place le conteneur dan s la pile. Par contre, il se peut
que le serveur ne puisse dcharger le camion son arriv puisqu ' il a une capacit limite .
Dans ces cas, le camion doit attendre dans une file que le serveur se libre. Su ite au
dchargement du camion, l'inventaire de conteneurs du terminal est incrment afin
d'enregistrer la variation entrane par le processus de dchargement. Suite ces oprations,
le camion passe au processus de chargement des camions. Le processus prcdemment dcrit
est schmatis sur la figure 5. 12.
125
.Arriva d'un
camion
Non
File d'atler>te
gurite potJr entre
Ajustement de
Fiie d'atrente
serveur camioo
l'irwentare de
la
cour
oontei1Ei!!Jt S de
Prossus
chargement
camions
Figure 5.12 Processus de dchargement de camions
5.4.11 Sous-modle du processus de chargement des camions
Suite au processus de dchargement des camions, le camion passe au sous-modle de
chargement des camions. Le point de dpart de celui-ci est l'allocation d'une demande au
camion. Ensuite, le camion doit se diriger vers un serveur o un conteneur sera charg .
Comme le serveur est une ressource ayant une capacit limite, s' il n'est pas disponible le
camion doit se placer dans une file d'attente jusqu' ce qu ' il le soit. Une fois l' opration de
chargement complte, le camion se dirige vers la gurite et le conteneur est soustrait de
l' inventaire du terminal. Rendu la gurite, si elle est disponible, le camion est trait et il
quitte ensuite le terminal. Dans les cas contraires, le camion se place dans une file d'attente
jusqu' ce que la gurite soit libre. La figure 5.13 prsente une reprsentation graphique du
processus de chargement des camions.
126
Nlocation dune
dema~deau
camion
Ajustrt\ent oe
l'inventaire !le
Fle d'attente
sef'Veur camion
conteneurs de
la coor
File d'atlenla
gu11te pol.r sonle
Dpart du
camion
Figure 5.13 Processus de chargement des camions
5.4.12 Sous-modle de rallocation des serveurs aux navires
Les ressources d'un terminal tant en nombre limit, le simulateur doit tre en mesure de
reprsenter le processus dcisionnel en cas de besoins excdant la disponibilit des
ressources. La premire possibilit ce niveau est un manque de serveurs pour les oprations
de dchargement et de chargement des navires. Ces oprations tant primordiales pour le
terminal, des serveurs doivent donc tre rallous afin de complter les oprations sur les
127
navires. La premire tape de cette rallocation consiste dterminer le nombre de
conteneurs qui sont chargs sur le train. Si ce nombre quivaut 75% du chargement destin
au train, les serveurs utiliss pour le chargement du train sont raffects aux oprations du
navire. Par contre, si ce nombre reprsente une proportion infrieure 75%, les serveurs
travaillant sur les camions seront utiliss pour les oprations sur les navires. La logique de
raffectation des serveurs pour les navires est illustre la figure 5.14.
Allocation
PRP et CPH
aux navires
import
AIIO<'..alion
PRP etCPH
aux navires
export
raln char
. .,, ?.
a 75
"'
Noo
Transfert des
>--~ serveurs camions
vers bateau
Camions en file
d'attente pou r
!*Jtvaurs
Oui
Train en file
d'attenta pour
serveurs
Fin du
pro:esSIJs de
ralrocation
Transfert des
serveurs du train
au t~;Jteau
Oui
~---<
Noo
Figure 5.14 Processus de rallocation des serveurs aux navires
5.4.13 Sous-modle de rallocation des serveurs aux trains
Dans les cas o des serveurs pour les oprations sur les trains sont manquants, celui-ci
prendra le serveur affect aux oprations sur les camions pour complter ses oprations, si le
nombre de conteneurs chargs est infrieur 75% du nombre de conteneurs charger. Dans
les cas contraires, les serveurs utiliss pour les oprations sur les camions ne changeront pas
d' allocation. Ce sous-modle de dcision est reprsent sur la fi gure 5.15 .
128
PrD$SW>
allocation
PRPet CPH
aux trains
Oui
Train en file
d'attente pour
serveurs
d'at:ente pour
Transfert des
seNe urs camions
serveurs
vers train
Cl mions er> f\ie
Figure 5.15 Processus de rallocati ons des serveurs aux trains
5.5 Conclusion
L'objectif de ce chapitre tait de montrer la reprsentation logique des oprations d' un
terminal portuaire de conteneurs qui sera utilise pour le dveloppement d' une simulation de
ces oprations. cette fin , plusieurs diagrammes modlisant les divers processus de ces
terminaux ont t prsents. C'est pa1tir de ces diagrammes que se fera l' implantation de la
simulation qui est l' objet du chapitre suivant.
CHAPITRE VI
IMPLANTATION D 'UNE SIMULATION D'UN TERMINAL MARITIME DE
CONTENEURS
Au cours du chapitre V, divers modles et sous-modles d ' une logique pour le design d'une
simulation des oprations d'un terminal maritime de conteneurs ont t prsents. partir de
ceux-ci, ce chapitre vise dvelopper une premire version d ' un outil de simulation d'un
terminal pmtuaire de conteneurs. Pour ce faire, la section 6.1 dfinit les objectifs de la
simulation, tandis que la section 6.2 prsente le logiciel utilis pour le dveloppement du
simulateur, ainsi que quelques concepts de base lis l'utilisation du log iciel afin de faciliter
l'exp lication de l'implantation. La section 6.3 prsente ensuite le terminal pottuaire de la cte
Est canadienne qui a t utilis pour 1' implantation. Les diffrentes so us-sections de la
section 6.4 prsentent les diffrents sous-modles du simulateur dvelopp. Chacune des
explications est accompagne d'une photo de 1'cran elu sous-modle en cours de description
afin de faciliter la comprhension. La section 6.5 termine le chapitre avec une brve
conclusion.
6.1 Objectifs de la simulation
En premier lieu, l'objectif principal de cette simulation est de dmontrer que la simulation
peut bel et bien tre applique aux ports canadiens. Ensu ite, un autre objectif est de
dvelopper un outil d ' analyse pour mesurer l'impact qu ' aurait l' application de systmes de
transport intelligents ces terminaux.
Par contre, il importe d'mettre une mise en garde par rapp011 aux objectifs prcdemment
prsents. En effet, d un manque de donnes, cettaines hypothses ont t faites quant aux
distributions utilises pour gnrer les arrives de camions au tenninal et les plans de
chargement et de dchargement des trains. Ces hypothses ont un impact sur l'implantation
des arrives de camions dans Je simulateur. En consquence, la sous-section concernant la
gnration de ces arrives de la section 6.4 de ce chapitre, l' implantation effectue sera
130
prsente, dans un premier temps; tandis que, l' implantation qui aurait t effectue avec les
donnes suffisantes sera prsente dans un second temps. Dans le cas des trains, ces
hypothses n 'ont pas d' impact sur l'implantation du processus d' arrive, mais elles auront un
impact au niveau des distributions utilises pour gnrer les plans de chargement et de
dchargement des trains. Les distributions utilises, ainsi que les donnes ncessaires pour
gnrer des distributions plus reprsentatives seront prsentes au chapitre suivant.
6.2 Logiciel utilis
Afin de dvelopper le simu lateur, la version 8.1 du logiciel ARENA (Kelton et col. 2004) a
t utilise. Ce logiciel a t choisi puisqu ' il prsente une interface graphique facile
d' utilisation qui pennet d 'acclrer le dveloppement du projet de simulation. De plus, un
ensemble complet de distribution s statistiques ainsi que plusieurs outil s statistiques sont
disponibles pour le dveloppement de la simulation et la cration de rapp01ts de rsultats.
Afin de faciliter la description de 1' implantation, i 1 importe de dcrire cl ' abord certains
concepts du logiciel de simulation ARENA.
6.2.1 Concepts de base de la simulation avec ARENA
Le dveloppement de la simulation se fait l'aide de modules, dont la fonction est prdfinie,
qui sont relis entre eux par des connections sur lesquels circulent des entits. l'arrive
d'une entit dans un module, un test logique peut tre effectu sur celle-ci, elle peut saisir une
ressource ou tre retenue pour une certaine priode de temps ou jusqu ' ce qu ' une condition
soit satisfaite. La figure 6.1 prsente ce1tains des modules de base qui sont utili ss pour le
dveloppement de simulations avec ARENA . Ces modules ne constituent pas une liste
exhaustive des diffrents modules du logiciel, mais constituent ce1tains des modules les plus
utiliss.
---- ----
131
dule de creati
M:ldule de
disposition
-.
tomdule de
groupement
M:ldule de
separation
tomdule de
procede
M:ldule d
. assignation
Ir
Compteur
'-
Figure 6.1 Modules de base du logiciel de simulation ARENA .
Les trois concepts qui sont au cur du logiciel de simulation ARENA sont les entits, les
attributs et les variables. Les entits reprsentent l'lment de base du logiciel. Celles-ci sont
cres au cours du droulement de la simulation, elles cheminent travers les diffrents
modules et sont ensuite dtruites. La cration et le cheminement des entits agissent comme
moteur de la si mulation. En effet, les actions des entits sont les vnements inscrits au
calendrier de la simulation. Le droulement de la simulation suit le droulement des
vnements inscrits au calendrier de la simulation . Ainsi, chaque vnement, la simulation
value l'tat du systme, met jour les diffrentes variables et procde ensuite l'vnement
suivant. Les entits reprsentent donc gnralement de vrais objets dans la simulation. Dans
le cas prsent, les entits reprsentent les navires, les trains, les camions et les conteneurs,
cette dernire forme tant la principale.
Les attributs sont des caractristiques communes tout les entits, mais dont la valeur est
spcifique chaque entit. Ils sont principalement utiliss pour identifier les entits en
circulation dans la simulation. Les variables (ou variables globales) sont utilises pour dfinir
132
une caractristique du systme. Contrairement aux attributs, les variables ne sont pas
rattaches une entit spcifique, bien qu 'elles soient modifies par les entits. Par exemple,
dans le cas de la simulation des oprations d' un tem1inal maritime de conteneurs, le nombre
de navires quai constitue une variable, tandis que le nombre de conteneurs chargs sur un
navire constitue un attribut, puisqu ' il est spcifique ce navire.
videmment, le dveloppement d' une simulation avec ARENA ne se rsume pas aux concepts
prcdemment dfinis. Par contre, ceux-ci reprsentent les concepts de base ncessa ires la
description de l' implantation. Pour une vue d' ensemble des possibilits de simulation avec
ARENA, le lectem peut se rfrer Kelton et col. (2004).
6.3 tude de cas pout l'implantation
Tel que mentionn dans le chapitre prcdent, l' implantation de la simulation s'est faite
pmiir de dom1es et d'estimations provenant d' un terminal de la cte Est canadienne. Cette
section du chapitre vise dfinir les cmactristiques du terminal qui ont d tre prise en
compte clans l'implantation de la simulation.
6.3.1 Disposition physique et quipements du terminal
La zone d' oprations portuaires du terminal est munie de quatre quais, dont seulement trois
peuvent tre uti liss pour les oprations sur les nav ires. En effet, trois des quatre quais
constituent une grande section linaire, tandis que le quatrime est inclin vers l' intrieur elu
terminal, ce qui bloque l'accs des grues de quais cette section, ces derni res tant limites
des dplacements latraux. Les grues de quai s utili ses pour les oprations de chargement et
de dchargement des navires sont au nombre de trois.
La zone de stockage du terminal consiste en une atre d'entreposage ouvetie d' environ
180 000 mtres carrs. Cette espace permet d' entreposer jusqu ' 7 200 EVP lorsque les
conteneurs sont entreposs en piles de trois conteneurs de haut. ventuellement, la capacit
pourra tre augmente en empilant les conteneurs jusqu' cinq de haut, mais l' heure
actuelle les quipements les plus gs du terminal ne le permettent pas. La zone de stockage
133
du terminal utilise un transfert indirect des conteneurs 1'aide de ponts roulants sm
pneumatiques, de chariots prise par le haut et de chariots prise par le haut avec mat
tlescopique. On retrouve sept ponts roulants sur pneumatiques, tandis qu'il y a quatre
exemplaires de chacun des deux autres types d'quipements.
La zone d'oprations terrestres est munie de quatre voies ferres d'une longueur totale de
10 000 pieds (environ 3 000 mtres) et d ' une gurite possdant deux voies d'entre et une
voie de sottie.
6.3.2 Horaire de travail et clientle
Les oprations sur les navires et les trains s' effectuent 24 heures par jour. Par contre, dans le
cas des trains, les oprations sont effectues durant le qumt de travail de nuit seulement
quelques rares occasions, afin de limiter les cots de main d'uvre qui s'y rattachent. En
effet, le taux horaire des employs est plus lev dans ces situations. E n ce qui concerne les
oprations sur les camions, elles sont effectues du lundi au vendredi entre huit heures et
seize heures. L ' allocation de la main d' uvre aux diffrentes tches se fait pour un e priode
huit heures. Il y a donc trois qumts de travail qui sont rpatti s comme suit: le qumt de jour
entre huit et seize heures, le quart de soir entre seize heures et minuit, et le quatt de nuit entre
minuit et huit heures.
En ce qui concerne les oprations sur les trains, une pmticularit s'applique au pmt dans
lequel le terminal est situ. En effet, bien que les wagons soient achemins au pmt par les
transpmteurs ferroviaires, l'acheminement des wagons sur les diffrents terminaux du pmt
est effectu par le port lui-mme. En consquence, mme si les transporteurs feJTov iaires
livrent les wagons au port selon un horaire prdfini, l' arrive des wagons au terminal recle
un facteur alatoire, puisque selon la distribution des wagons qui doit tre effectue entre les
diffrents terminaux, l' heure d'arrive des wagons dans les diffrents terminaux peut varier.
En ce qui a trait la clientle, le terminal fait affaire avec un client principal qui exploite
deux lignes pattir de la cte Est canadienne. La premire se rend en Europe du Nord et
utilise des navires ayant une capacit d ' environ 3 000 EVP, tandis que la seconde se rend en
134
Amrique centrale et utili se des navires de capacits qui varient entre 1 000 et 1 200 EVP.
Les deux services ont des dparts hebdomadaires vers leurs destinations respectives. La
distribution des conteneurs vers les clients finaux possde les mmes propottions pour les
deux lignes, soit 45% des conteneurs livrs par camions et le reste livr par train.
6.4 Implantation
L'objectif de cette section est de montrer de quelle faon les modles et sous-modles du
simulateur, prsents au chapitre prcdent, ont t implants dans le logiciel de simulation
ARENA . Ce faisant, les diffrentes embches rencontres ainsi que les choix et comprom is
qu'elles ont entrans seront aussi prsents. Les diffrents modles de la simulation seront
prsents selon une approche elu haut vers le bas, soit des niveaux les plus gnraux aux
niveaux les plus dtaills. Afin de simplifier la description de l' implantation de la simulation,
des images de 1' interface graphique elu logiciel ARENA seront prsentes pour chacun des
modles et sous-modles du simulateur.
6.4.1 Modle gnral
Ce modle reprsente la vue la plus gnrale du simulateur du terminal. En effet, sa plus
simple expression, le systme est compos des arrives des divers modes de transport, ceuxci sont traits par le terminal, pour, ensuite, le quitter. Tel qu ' il peut tre observ sur la fig ure
6.2, qui reprsente ce niveau du simulateur, deux sous-mod les supplmentaires sont compris
dans ce niveau de la simulation. En ce qui concerne le sous-modle identifi par 1'tiquette
questions techniques, il s'agit d' un sous-modle qui comprend les dfinitions des divers
lments qui composent la simulation, soit les variables, les entits, les attributs et les
ressources utilises pour le dveloppement elu simulateur. Dans l'autre cas, soit le sousmodle qui porte l'tiquette allocation serveurs, il contient l'ensemble des sous-modles
lis au processus d' allocation des serveurs elu terminal.
135
~ Arrives trains
~ Dparts train s
~ Arrives navires
~ Dparts navires
+ Terminal
~ Arrives camions
~ Questi ons techniques
~ Dparts camions
~ PJiocati on serveurs
Figure 6.2 Modle gnral de la simulation .
6.4.2 Arrive des navires et gnration des arrives
Le sous-modle d'arrive des navires est compos de deux autres sous-modles, soit les sousmodles de gnration des arrives de navires et d' a llocation de quai et de grues de quai . Ce
modle est relativement simple, puisqu'il se limite aux deux sous-mod les prcdemment
mentionns. Le premier, qui constitue un des points de dpart de la simulation, gnre des
navires auxquels le second attribue un quai et des grues de quai.
La figure 6.3, illustre le sous-modle de gnration des arrives de nav1res. Les deux
premiers modules situs la gauche du schma sont les modu les de cration des navires. Ces
modules uti lisent une distribution qui leur a t attribue afin de gnrer de faon alatoire
136
1'arrive des navires de deux diffrentes lignes de transport maritime de conteneurs. Les
distri butions utilises pour gnrer ces anives, comme l'ensemble des distributions
statistiques utilises dans le simu lateur, seront prsentes dans le chapitre suivant po1iant sur
la cali bration et la validation de la simulation.
Les deux modules qui suivent immdiatement les modules de cration sont des modu les de
retenue. Un module de retenue est uti lis pour, comme son nom l'indique, reten ir une entit.
Il existe trois types de modules de retenue. Le premier type relche l'entit la rception
d' un signal, le second type la relche lorsqu ' une condition est satisfaite et le dernier retient
l' entit jusqu ' ce qu' un module de retrait retire l' entit de la file d'attente du modu le de
retenue. Dans le cas prsent, le second type de modu le de retenue est utilis. Lorsqu'une
entit se prsente ce module, il vrifie si Je nombre de navire quai est infrieur deux. Si
tel est le cas, le navire est relch et poursuit le processus. Dans le cas contraire, il est retenu
j usq u' ce que la condition s'avre vraie. Cette condition est ncessaire afin de s'assurer que
le nombre de navires quai n'excde pas le nombre de navires en service sur les diffrentes
lignes maritimes qui frquentent le tenninal.
Une fois qu ' un navire est relch par un modul e de retenue, les modul es d'affectation qui
suivent, ass ignent des attributs au navire et mettent jour certaines variables du systme. Les
attributs ass igns aux navires sont le nombre de conteneurs dcharger, le nombre de
conteneurs charger, le temps d'arriv du navire ainsi que la li gne laquelle il appmtient. De
plus, une variable qui tient Je compte du nombre de navires quai de cette ligne est
incrmente de un.
Le cheminement sera ensuite diffrent selon la ligne laquelle le navire appartient. En ce qui
concerne les navires de la ligne numro deux, leur sortie du premier module d' affectation,
ils sont dirigs vers un autre module d'affectation qui leurs affecte un rang de navire, selon la
prsence ou non d' un autre navire de la mme ligne quai. En effet, si un navire de la
second e ligne est quai au mme moment, le nouvel arrivant se voit attribu le rang de
navire deux. Les navires convergent ensuite vers un module de compte et un module
d'affectation qui assigne la valeur actuelle du compteur comme nom au navire.
137
Pour les navires de la ligne un, la procdure est diffrente. Cette diffrence est due la
distribution statistique utilise pour reprsenter les arrives de navires de la ligne. En effet,
cette distribution peut gnrer occasionnellement des valeurs de zro pour le temps entre les
arrives de navires, ce qui reprsente l'arrive simultane de deux navires. Ces arrives
simultanes avaient pour effet une erreur dans la simulation, puisque deux navires se
retrouvaient quai simultanment et possdaient le mme rang de navire. Le module de dlai
qui suit le module d'affectation retient les navires pour une priode de 0,0005 heure. De cette
faon, la variable qui compte les navires de la premire ligne est mise--jour avant que le
second navire se prsente aux modules d' affectation qui affectent les rangs de navire. Ainsi,
la problmatique prcdemment dcrite est vite. Le module de dci sion , qui suit le module
de dlai , dirige les navires vers les modules d' affectations, selon qu ' il s' agisse du premier ou
du second navire. leur sortie du module d' affectation, la suite du processus est la mme
que les navires de la ligne deux.
138
Figure 6.3 Sous-modles de gnration des arrives de nav ire.
6.4.3 Allocation de quai
L'tape suivante, l'arrive d'un navire, est l' affectation d ' un quai. Pour ce faire, les navires
doivent d'abord passer par un module de retenue. Bien que le terminal utilis comme tude
de cas pour l' implantation possde quatre quais, il a t choisi de limiter Je nombre de quai
dans Je modle deux, puisque le nombre de grues de quai limite le nombre de navires qui
peuvent tre traits simultanment deux. Ainsi, le module de retenue retient les navires
lorsque Je nombre de navire quai est gal deux.
Ensuite, un module de dlai, qui porte Je nom de dlai 17 sur la figure 6.4, retient les navires
pour une priode de 0,0005 heure avant qu ' ils se dirigent vers les modules de dcision et
d' affectation qui suivent. Comme dans le cas du sous-modle d ' arrive des navires, ce dlai a
139
pour objectif d'viter que les entits passent par des modules de dcisions sans que les
variables aient t mises--jour.
La suite de modules de dcision et d'affectation qui suit est utilise afin de dtenniner si le
navire est l' unique reprsentant de sa ligne ou s'il se prsente alors qu ' un navire de sa ligne
est dj aman au terminal. Le premier module de dcision trie les navires selon la ligne
tandis que les seconds modules de dcision vrifient s'il est le premier ou le second de sa
ligne. Les modules d'affectation qui suivent allouent ensuite un attribut aux navires afin de
les diffrencier s' ils proviennent de la mme ligne, cet attribut se nomme le rang du navire.
Une fois que le navire est identifi, un module de sparation cre des coptes du nav tre,
lesquels seront ensuite diriges vers un module d'affectation qui leurs affecte un nouvea u
type d'entit, soit un conteneur. Le nombre de duplicata est dtermin par l'attribut nombre
de conteneurs dcharger qui a t attribu au navire pralablement. Ces conteneurs se
dirigent ensuite vers le sous-modle des grues de quai o la sim ulation des oprations de
dchargement des navires dbute. Une fois que les conteneurs sont crs, l'e ntit originale,
soit le navire arrivant, est encore une fois spare. Le duplicata ainsi cr se dirige vers le bas
de la fentre o des grues de quai seront attribues au navire, tandis que l'o rigin al poursuit sa
route vers un module de dcision qui trie les navires selon la ligne laquelle ils
appmiiennent. Bien qu ' un duplicata du navire ait t cr, la simulation considre qu'il y a un
seul navire prsent au terminal. En effet, le duplicata agit titre d ' entit de contrle pour
1'allocation des grues de quai. Une entit de contrle est une entit qui existe seulement pour
reprsenter des prises de dcision, mais qui n'existe pas rellement dans le systme physique.
Les modules d' affectation qui suivent servent mettre jour une variable qui dtennine le
nombre de navires quai de chacune des lignes. Le navire poursuit ensuite sa route vers un
module de retenue qui retiendra le navire jusqu ' ce que les oprations de dchargement et de
chargement de celui-ci soient compltes.
140
Figure 6.4 Sous-modle d' allocation des quais.
6.4.4 Allocation des grues de quai
La premire tape de l' a ll ocati on de grues de qu ai consiste dterminer si un navire ut ilise
dj certaines grues ou s i elles sont toutes libres. Pour ce fa ire, l'entit de contrle passe par
un modu le de dcision qui vrifie si le nombre de navires quai est gal zro. Dans les cas
o la condition est fausse, l'entit est dirige vers un sous-mod le de rallocation des grues
de quai aux navires. Si la condition est vraie, le navire se dirige vers les modu les de dcis ions
suivants qui trient les navires en fonction de la ligne et du ran g, afin qu' un nombre de grues
lui soit assign en fonction de ces caractristiques. L ' assignation des grues de quai aux
navires se fait par la mise jour d ' une variable qui dfinit le nombre de grues de quai
alloues chacun des navires. Une fo is cette variable mise jour, l' entit de contrle se
dirige vers un module de retenue, qui la retient pour une priode de huit heures, ou jusqu '
141
l'arrive d ' un autre navire. L'entit de contrle est retenue pour une priode de huit heures,
puisque Je dploiement de la main d ' uvre est effectu pour des priodes de huit heures . Le
terminal value donc l' allocation des grues de quai cet intervalle puisque l' allocation des
grues de quai aura un impact sur le nombre d ' oprateurs de grues ncessaire. Si aucun navire
n' arrive durant les huit heures, le navire retenu est relch, il est tri par des modules de
dcisions, en fonction de sa ligne d' appartenance et de son rang, et les modules d ' affectation
qui suivent incrmentent une variable qui calcule les heures travailles par les grues de quai,
afin de calculer la productivit des oprations sur Je navire lorsqu ' elles seront compltes. Le
navire suit ensuite les connections qui le retournent au module de dcision en amont du
processus d'allocation des grues de quai . La modlisation de ce processus est illustre la
figure 6.5.
Figure 6.5 Allocation des grues de quai.
142
6.4.4.1 Rallocation de grues de quai
La premire tape de la rallocation des grues de quai est de dterminer si les navires
proviennent de la mme ligne ou s'ils proviennent de lignes diffrentes, ce qui est
gnralement le cas. Lorsque les navires arrivent au processus de rallocation des grues de
quai, un module de dcision value le nombre de navire de la ligne 1 quai. Pour ce faire une
variable qui reprsente ce nombre est interroge et si la rponse est ga le deux, les navires
sont dirigs vers le sous-modle identifi paJ l'tiquette Rallocation grues de quai 1 sur
la figure 6.6. Si la rponse est quivalente un, donc qu'il y a un navire de chaque ligne
quai, les navires sont dirigs vers Rallocation grues de quai 2 et vers 1'autre sous-mod le
si la rponse est gale zro. Cette dernire rponse signifie que les deux navires quai
appartiennent la ligne numro deux. De plus, un compteur et un module de disposition des
entits ont t ajouts au cas o la variable aurait une valeur qui ne correspondrait aucune
des possibilits. Dans ces cas, la simulation enregistre une erreur.
143
~ Rallocauon grues de qua1 1
Rallocalion grues de qua1 2
Rallocalion grues de quai 3
Figure 6.6 Premire tape du processus de rallocation des grues de quai.
6.4.4.2 Sous-mod les de rallocation des grues de quai
La figure 6.7 prsente le sous-modle de rallocation Rallocation grues de quai 1 . La
premire tape de ce sous-modle est de trier les navires en fonction de leur rang. En effet,
connaissant le rang du navire qui a mis en branle le processus de rallocation, le simulateur
pourra ainsi retirer l'autre navire du sous-mod le d 'allocation des grues de quai, pour le
soumettre au processus de rallocation. Pour ce faire, un module de dcision dirige d ' abord
les navires vers un module de recherche en fonction de leur rang. Un module de recherche est
un module qui permet d ' effectuer une recherche dans une file d ' attente pour identifier une
entit particulire en fonction d ' un attribut. Dans le cas prsent, le module de recherche, qui
suit le module de dcision, identifie ensuite le navire ayant le rang contraire, dans la file
d ' attente du module de retenue des navires du processus d ' allocation des grues de quai. Par
144
prcaution, un compteur et un module de disposition ont t ajouts afin de relever une erreur
potentielle dans la condition de recherche du module de recherche. Lorsque le module de
recherche trouve le navire recherch, il l' identifie et le module de retrait qui suit le retire de la
fi le d'attente et le dirige vers un module d 'affectation. Ce module d 'affectation met jour la
variable qui garde le compte des heures travailles par les grues de quai.
L ' objectif de la premire tape de ce processus consiste identifier les navires et mettre
jour les variables du systme. La deuxime tape de ce processus procde la rall ocat ion
des grues de quai. Tout d ' abord, les navires passent par un module de dcision qui les dirige
vers des modules d ' affectation en fonction de leur rang. ce module, la charge de travail
restante de chacun des navires est calcule et
Lm
attribut conesponclant cette charge de
travail leur est assign. La charge de travail restante d ' un navire correspond au nombre de
conteneurs restant dcharger du navire auquel on ajoute le nombre de conteneurs qu ' il reste
charger sur le navire.
Les modules de groupement et de sparation, qui suivent les modules d 'affectation, visent
assurer qu'une des deux entits ne poursuive pas sont chemin, sans que le calcu l de la charge
de travail restante de l'autre ne soit fait. Sans ces modules, la charge de travail restante du
prem ier navire est compare la charge de travai l restante du second nav ire lors de son
dernier passage au module d 'affectation. En consquence, la comparaison n'est pas
reprsentative de la charge actuel de travai l des navires. Cette situation est clue une
particularit ci 'ARENA, qui poursuit le cheminement d'une entit jusqu ' ce qu 'elle atteigne
un module qui la retient ou lui impose un dlai . Par contre, l'utilisation des modules de
groupement et de sparation permet cl 'viter cette situation.
Une fois que les entits sont spares, un module de dcision compare leur charge de travail
restante et les dirige vers des modules de dcision et d ' affectation qui les trient et assignent
deux grues de quai celle dont la charge de travail restante est la plus importante. Lorsque
l' affectation est faite, les navires quittent le sous-modle et retournent vers le modle
d' allocation des quais et des grues de quai, o ils seront retenus pour huit heures.
----
- - - -- - -- - -
145
Figure 6.7 Sous-modle Rallocation des grues de quai 1
Le sous-modle Rallocation grues de quai 3 est identique au sous-modle Rallocation
grues de quai 1 , l'exception que les tests logiques des diffrents modules s'appliquent aux
navires de la ligne 2. Quant au sous-modle Rall ocation grues de quai 2 , la logique est la
mme, l'exception qu ' il doit tenir compte d' un plus grand nombre de possibilits d' identit
des navires, puisqu ' il traite les cas o deux navires sont quai, mais qu ' ils proviennent de
lignes diffrentes. Les possibilits sont plus nombreuses d au rang des navires qui doit tre
pris en compte paralllement la ligne d'appartenance du navire.
Les diffrents modles et sous-modles prsents jusqu' maintenant reprsentent le premier
tiers du modle d'arriv des navires prsent au chapitre prcdent (voir figure 5.3). En effet,
ces modles reprsentant l'arrive des navires, l' allocation des quais et l'allocation des grues
146
de quai. En se rfrant la figure 5.3, il peut tre constat que l' tape suivante est l' allocation
des serveurs aux navires pour les oprations de dchargement.
6.4.5 Allocation des serveurs
Bien que dans les divers modles et sous-modles de la logique de la simulation , prsents
au chapitre prcdent, 1' allocation des serveurs soit prsente comme plusieurs dcisions
indpendantes, l'implantation de ces dcisions dans le simulateur ne peut tre faite de cette
faon. En effet, celles-ci doivent tre intgres, afin de s' assurer que le nombre de serveu rs
allous n'excdera pas le nombre de serveurs disponibles. L'approche utilise pour le
processus d'allocation des serveurs consiste dfinir l'tat du systme l' aide de variab les
globales et de comparer l'tat actuel avec les diverses possibi lits d'tats contenues clans un
fichier texte externe la simulation .
La premire variable indique le nombre de navires qui se trouvent aux quais du terminal.
Ensuite, une srie de variables dfinissent l'tat des navires en fonction de leurs lignes
d' appa1ienance et de leurs rangs. L ' tat d' un navire sera gal un si le navire dcharge des
conteneurs, deux s'il charge des conteneurs et zro s' il n' y a pas de navi re de cette li gne et
de ce rang quai. En effet, les variables d'tat des navires sont au nombre de quatre, la
premire dfinit l'tat des navires de la premire ligne et de rang un , la seconde dfmit l'tat
des navires de la premire ligne de rang deux et la troisime et la quatrime variable sont les
mmes, mais s'appliquent aux navires de la deuxime ligne. Le nombre de grues de quai
alloues chaque navire est aussi reprsent par des variables globales, tandis que les deux
demires variables sont utilises pour dfinir la prsence (1) ou non (0) d' un train, ainsi que
le nombre de serveurs requis pour le traitement des camions (0, 1 ou 2) . chacune des
possibilits d'tat du terminal, une allocation des serveurs est ajoute. Cette allocation est
dtemne en fonction des rgles de dcision qui ont t dfinies dans les divers modles
logiques du chapitre prcdent (voir les figures 5.5, 5. 7, 5.11 , 5.14 et 5.15).
Par contre, la rgle stipulant que le train laissera le serveur aux camions si 75% du
chargement du train est complt n ' a pas t implante. En effet, l' implantation de cette rgle
se faisait difficilement avec 1' implantation actuelle du processus cl ' allocation des serveurs,
147
puisqu'il aurait t ncessaire d' inclure une variable dfinissant si le chargement du train
excde 75% du train ou non, dans le fichier externe dfinissant les tats du terminal. En
consquence, le nombre d' tats possibles du terminal aurait t doubl. Cette dcision aura
peu d' impact sur les rsultats de la simulation, puisqu ' un seul tat du terminal peut mener
un manque de serveurs. En effet, il y aura un manque de serveurs lorsque deux navires
dchargent, que des oprations de dchargement ou de chargement des trains s'effectuent et
que deux serveurs sont ncessaires pour le traitement des camions. Dans ce cas, il manque un
serveur. Il a t choisi de prioriser les trains au dtriment des camions, au lieu d'appliquer la
rgle du 75% de chargement des trains. Ainsi, lorsque cette situation se prsente, un seul
serveur est affect aux camions jusqu'au prochain dploiement des serveurs.
mFdo E<l:: Vlow look Arl'anQe obl8ct R~ ~ Heb
jT[l;;i; i-ji Gi-i eiri m:;;;; e; : :;:; ;~- g i-Ps;;
"
7 -, 2
Ji
~o
A i.t:
~ .6. !@
i :: ml
~ ! ~ , ~ ~ ;:iiiii ; ~
'JI ~
W l ll!ll ol
~ ~!< i .i 1t
" " " "1
Il
!j l1
' fl M;
. ~?
Il!.f il<l .e ""
-6 ['ii
ln1tial1sationj
Allocation seiVeurs 2
Figure 6.8 Modle gnral d'allocation des serveurs
~--
------------
148
La figure 6.8 prsente le modle gnral d' allocation des serveurs . Le module de cration qui
se trouve en amont du processus est utilis pour crer une entit de contrle au dbut de la
simulation. Cette entit cyclera travers le modle afin de comparer l'tat actuel aux
diffrentes possibilits d'tat du systme et d'allocation des serveurs. Les deux modules
suivants sont utiliss des fins de contrle. En effet, le module d'affectation incrmente une
variable qui indique quelle possibilit l'tat actuel est compar. Le module de dcision
intenoge cette variable afin de s'assurer qu'elle est infrieure au nombre de possibilits
existantes. Si la variable est suprieure cette valeur, l'entit de contrle est dirige vers un
compteur qui enregistre l'eneur et elle se dirige ensuite vers un module de disposition .
Lorsque la variab le est infrieure au nombre de possibi lits existantes, elle est dirige vers Je
sous-modles qui porte l'tiquette Allocation serveurs 2 , o la comparai son entre les
variables globales de dfinition du systme et les possibilits qu'elles peuvent prendre sont
faites pour chacune de ces variables globales. Cette comparaison se fait l' aide de modules
de dcision qui comparent les valeurs des variables de dfinition du systme et les variables
d' tats possibles. Tel qu'illustr sur la figure 6.9, lorsque la rponse s'avre fausse , l'entit de
contrle est dirige vers la sortie infrieure du sous-modle qui la redirige vers Je premier
module du modle gnral d'allocation des serveurs. Lorsqu'une concordance entre l' tat
ach1el elu systme et l'tat dfini est obtenue, 1'entit de contrle sort du sous-modle par la
branche du haut et se dirige au module d'allocation qui suit. ce module, l'allocation des
serveurs est faite selon la possibilit retenue et l'entit est ensuite retenue dans un module de
dlai pour une priode de deux heures. la fm de cette priode, elle est relche, el le traverse
un module d' affectation qui remet le compteur de cycles zro et le processus d' allocation
reprend.
Cette rallocation priodique est effectue afin de reprsenter les rallocations de serveurs qui
se font en temps rel dans les terminaux maritimes de conteneurs. Ces rallocations de
serveurs sont effectues de ton allouer la capacit des serveurs du terminal aux
diffrentes tches accomplir, que ce soit les oprations sur les navires, les trains ou les
camions. En effet, si, par exemple, un retard trop imp01tant s' accumule sur les oprations de
chargement des wagons de chemin de fer, il se peut que les gestionnaires du tem1inal
dcident de retirer de la capacit sur les oprations de chargement des camions pour l' affecter
149
au chargement des trains. Concrtement, cela signifie que des serveurs affects au
chargement des camions seront affects au chargement des trains. Par contre, puisqu ' une
rallocation en temps rel est difficilement ralisable dans le cadre de cette simulation, une
priode de temps fixe a d tre choisie. Un dlai de deux heures permet un quilibre entre la
reprsentativit de la simulation et l' effort de traitement la ralisation des rondes de
simu lation.
13
-
Do>' IOI
7
'l
(9. [;~> e, [ .-, "; g
2 0 f;> o A ' .t~.e..
:<21 1= 1'?i!
Figure 6.9 Sous-modle Allocation des serveurs 2
Tel que mentionn auparavant, chaque cycles effectus par l' entit de contrle, une variable
est incrmente, afin d' identifier les diffrentes possibilits . Par contre, afin de comparer
l'tat actuel du systme aux diffrentes possib ilits, des valeurs doivent tre assoc ies aux
variables de comparaison uti lises dans le sous-modle Allocation des serveurs 2. C'est la
150
fonction que remplie le sous-modle d'initialisation elu modle d'allocation des serveurs
(figure 6.1 0).
Au dbut de la simulation, une entit de contrle est cre afin de lire les diffrentes
possibilits d' tat du terminal et les allocations des serveurs qui y sont associes. Cette entit
passe d'a bord par un module d' affectation qui incrmente une variable qui sert d' index
d'identification chacun des tats du terminal dfinis dans le fichier texte exteme la
simulation. Ensuite, un module de dcision s'assure que le nombre de cycles effectus par
l'entit est infrieur aux nombres de lignes du fichier texte. Lorsque toutes les lignes du
fichier sont lues, la condition du module de dcision devient fausse et l'entit est dirige vers
un module de disposition. Dans les cycles prcdents, l' entit de contrle se dirige vers un
module de lecture de fichiers extemes, o une valeur est associe aux variables de dfinition
du systme, pour 1' index de lecture courant.
151
ft} Ar:ena (Modcle_fmo.l_pte:senlahon)
rg)()J
-
~x
Figure 6.10 In itialisation de l'allocation des serveurs.
Ainsi, lorsque l'entit de contrle cycle dans le sous-modle Allocation des serveurs 2, elle
se rfre la valeur des variables pour 1' index quivalent la variable qui dfinit son numro
de cycle.
6.4.6 Oprations sur les navires
Le modle d' oprations sur les navires est un so us-modle de la section Terminal du
modle gnral de la simu lation prsent la figure 6.2. C'est l'intrieur de ce sous-modle
que sont reprsentes les oprations de dchargement et de chargement des navires. En se
rfrant la figure 5.6 du chapitre prcdent, il peut tre constat que suite la saisie du plan
de chargement, l' tape suivante du processus de dchargement est le dchargement des
conteneurs du navire par les grues de quai. C'est pourquoi, les divers sous-modles du
152
modle d'oprations sur les navires seront prsents dans l'ordre suivant: Grues de quai,
Dchargement et Chargement.
6.4.6.1 Grues de quai
Suite leur cration dan s Je modle d'allocation des quais, les conteneurs sont dirigs vers le
sous-modle des grues de quai, qui est reprsent la figure 6.11. Les conteneurs sont
d'abord spars selon leur ligne d'appartenance, la ligne un vers Je haut et la ligne deux vers
le bas. Ensuite, un module de retenue s'assure que la somme des conteneurs en file d'attente
aux diverses grues est infrieure ou gale quinze. Cette condition a pour objectif d'viter
que les conteneurs soient dirigs vers une grue et qu 'une rallocation des grues aux navires se
fasse alors que des conteneurs sont toujours en file d'attente pour une grue qu i est maintenant
alloue un autre navire. Le module de retenue qui suit le premier s'assure qu 'u n navire est
bien retenu dans le modu le de retenue du processus d'all ocation des grues de quai. En effet,
si un conteneur est relch alors que la rallocation des grues de quai n'est pas term ine,
celui-ci peut tre allou la mauvaise grue ou causer une eneur qui fait chouer la
simul ation .
La suite du processus consiste dterminer quelle grue traitera le conteneur et effectuer ce
traitement. Un module de dcision trie les conteneurs en fonction de leur rang et les modules
d'affectation qui suivent assignent un attribut au conteneur qui correspond au nombre de
grues de quai qui ont t alloues son navire d'appartenance. Ensuite, selon Je nombre de
grues qui ont t alloues ce navire, le conteneur sera dirig vers des modules de dcision,
qui dirigeront les conteneurs vers la grue la charge de travail minimale entre les grues
alloues au navire. Ainsi, pour les navires de la ligne un, si le nombre de grues est gal
trois, les contenems sont dirigs vers le module de dcision situ au haut de la figure 6.11. Ce
module choisit la grue avec la charge de travail minimale entre les trois grues. Lorsque le
nombre de grues est gal deux, un module de dcision choisit la grue la charge de travail
minimale entre les grues un et deux, et lorsqu 'une seule grue est alloue au navire, les
conteneurs sont dirigs directement vers la grue trois. Pour ce qui des navires de ligne deux,
le principe est le mme, l' exception que le nombre maximal de grues alloues ces navires
est de deux. Finalement, lorsque les conteneurs ont t traits par une grue de quai, un
153
module de dcision les dirige vers le sous-modle de chargement ou de dchargement selon
la valeur de leur attribut nomm import/export. Lorsque la valeur est gale deux, les
conteneurs sont dirigs vers le chargement, tandis que lorsque la valeur est gale un, ils sont
dirigs vers le dchargement.
Figure 6.11 Sous-modle des grues de quai.
6.4.6.2 Dchargement
Lorsque les conteneurs entrent dans le sous-modle de dchargement des navires, le premier
module rencontr est un module de dcision qui les trie en fonction de leur navire
d'appartenance. Ensuite, un module d'affectation est utilis pour incrmenter une variable qui
reprsente le nombre de conteneurs dchargs du navire. Les modules de dcisions qui
suivent, valuent la condition d'galit entre la valeur de cette variab le et l'attribut des
154
conteneurs qui reprsente le nombre de conteneurs dcharger de leur navire d'appartenance.
Tant que cette condition est fausse, les conteneurs sont dirigs vers un module de dlai. Ce
dlai sert reprsenter le temps de transport entre la grue et la pile de conteneurs, bien que le
nombre de vhicules de transport interne soit assum comme infini, un temps de transport
doit quand mme tre attribu aux conteneurs, puisque ce transport doit quand mme tre
effectu. Une fois ce dlai pass, le module suivant assigne un attribut qui dfinit le temps
ncessaire au serveur pour le transfert du conteneur dans la pile. Finalement, un compteur
enregistre le nombre de conteneurs qui ont t dchargs et les conteneurs sortent de ce sousmodle pour se diriger vers le sous-modle qui reprsente les oprations des serveurs.
Figure 6.12 Dchargement des navires
Par contre, lorsque la condition d'galit entre le nombre de conteneurs dcharger et le
nombre de conteneurs dchargs est vraie, un duplicata du conteneur suit le mme chemin
155
que les autres conteneurs, tandis que l'original prend une autre direction. partir de ce point,
1' original est utilis comme entit de contrle pour dclencher les oprations de chargement
du navire. Le conteneur, qui agt comme entit de contrle, se dirige vers la branche du haut
du module de sparation . Il est tri par les modules de dcision qui identifient d'abord la
ligne d'appartenance et ensuite le rang, et les modules d'affectation changent la variable
d'tat elu navire pour qu' il soit en chargement. De plus, une variable dfinissant le nombre de
conteneurs chargs sur ce navire est rinitialise. L'entit de contrle quitte ensuite le sousmodle de dchargement des navires et se dirige vers le sous-modle de chargement des
nav1res.
6.4.6.3 Chargement
Tel qu ' il peut tre constat sur la figure 5.8 du chapitre prcdent, le processus de
chargement des navires dbute la pile de conteneurs de la zone de stockage elu tenninal.
C'est ce qui explique pourquoi le sous-modle de chargement des conteneurs du simulateur
prsent la figure 6.13 comprend deux parties. En effet, la partie du haut reprsente les
tapes du processus qui doivent tre effectues avant que le conteneur so it charg sur le
navire, tandis que la pmtie du bas reprsente les tapes qui suivent le chargement du
conteneur sur le navire.
L'entit de contrle issue elu sous-modle de dchargement des navires se prsente dans le
sous-modle de chargement des navires par le point d'entre suprieur. Il se dirige ensuite
vers un module de sparation o un nombre de duplicatas quivalent au nombre de
conteneurs charger sur le navire sera cr. Le nombre de contenems charger sur le navire
est
COIUlU
pour l' entit de contrle, puisque cette dernire possde un attribut dfinissant ce
nombre. Une fois les conteneurs charger crs, l'entit de contrle se dirige vers un module
de disposition.
Quant aux conteneurs issus elu module de sparation, ils sont dirigs vers un module de
dcision qui les dirigera vers le haut elu modle selon une probabilit de 55% et vers le bas le
reste du temps. Cette probabilit provient d'une estimation de la distribution des conteneurs
par modes de transport fournie par les dirigeants du tenninal utilis pour implanter la
156
simulation. En effet, selon eux 55% des conteneurs chargs sur les navires sont achemins au
terminal par train, tandis que les 45% restants sont achemins par camion. L'valuation de la
distribution est la mme en cc qui concerne les conteneurs dchargs. La suite de la
description conceme seulement le traitement effectu sur les conteneurs iss us de la branche
de droite du module de dcision. Par contre, le traitement sera le mme pour les conteneurs
issus de la branche du bas du module de dcision, l'exception que l' inventaire de
conteneurs arrivs par camion est diminuer et non l' inventaire de conteneurs arrives par
train.
Ainsi les conteneurs dirigs vers le haut passent ensuite par un module de recherche qui
identifie un conteneur exporter dans la zone de stockage elu terminal. Ce conteneur est
ensuite retir de la zone de stockage par le module de retrait et il est ensuite dirig vers un
module de disposition. Ce demier est dtruit, puisque le conteneur ayant dclench le retrait
de la zone de stockage est utilis pour la suite du processus de chargement. La raison d' tre
de ce retrait est de diminuer l'inventaire de conteneurs du terminal. Dans les cas o
1'inventaire de conteneurs est insuffisant, le rsultat de la recherche elu module 1'ayant
effectu sera ngatif. En consquence, l'entit qui a dclench la recherche ress01tira du
module par la branche du bas. Lorsque le nombre de conteneurs en inventaire est suffisant, le
conteneur ayant dclench la recherche se dirige ensuite vers un module d'affectation o on
lui accorde un attribut qui stipule qu'il s' agit d'un conteneur qui doit tre charg sur un
navire. De plus, un autre attribut dtennine Je temps ncessaire pour 1'opration de retrait du
conteneur de la pile par le serveur et une variable, reprsentant le nombre de conteneurs
achemins au terminal par train, est diminu de un. Les conteneurs quittent ensuite le sousmodle de chargement des navires et se diri gent vers le sous-modle qui reprsente les
serveurs. Afin de simplifier la comprhension, la suite du sous-modle de chargement des
navires sera dcrite avant de dcrire le sous-modle des serveurs. Pour le moment, retenons
que les conteneurs qui se prsentent ce sous-modle subissent un traitement qui simule le
temps ncessaire aux serveurs pour saisir un conteneur dan s la cour et le charger sur un
vhicule de transp01t interne.
157
Figure 6.13 Chargement des navires.
Suite leur traitement par le sous-modle des serveurs, les conteneurs passent par la suite par
le sous-modle des grues de quai avant de revenir au sous-modle de chargement des navires.
Ce passage par le sous-modle des grues de quai simule le chargement des conteneurs sur le
navire. La suite du sous-modle de chargement des navires est ncessaire pour comptabiliser
les conteneurs chargs et dclencher le processus de dpart des navires lorsque le chargement
est complt. Lorsqu'ils reviennent, les conteneurs arrivent par le point d'entre du bas du
sous-modle. leur arrive, ils sont tris selon leur li gne d'appartenance par un module de
dcision et ils incrmentent une variable qui reprsente le nombre de conteneurs chargs sur
le navire. L'incrmentation est faite par les modules d'affectation qui suivent le module de
dcision. La suite consiste dterminer si le chargement du navire est complt en comparant
la valeur de la variab le pour le nombre de conteneurs chargs et l'attribut des conteneurs qui
indique le nombre de conteneurs charger. Lorsque le nombre de conteneurs chargs est gal
158
au nombre charger, donc que le chargement est complt, le conteneur est diri g vers le
sous-modle de dprut s des navires, autrement il est compt et dtruit.
6.4.7 Serveurs
Avant de vo ir ce qu ' implique le dpart d' un nav ire dru1s la si mulation, il importe de revenir
sur le sous-modle qui reprsente les opratio ns des serveurs. En eftt, les serveurs sont
impliqus dans les processus de dchargement et de chargement des conteneurs, ainsi que
dans les oprations de chargement et de dchargement des autres modes de transport.
Peu importe le mode de trru1sport duquel les conteneurs prov iennent, le principe gnral est le
mme pour les opration s des serveurs. En effet, le conteneur anive un module de retenu e,
qui le retient jusqu ' ce que le nombre de serveurs occups traiter des co nteneurs so it
infrieur au nombre de serveurs qui ont t allous ce type d ' opration. Un module
d'affectati on augmente ensuite le nombre de serveurs occ ups au passage elu co nteneur et ce
demier se dirige ensuite vers un module de procd qu i reprsente les oprations des
serveurs. son arriv ce module, le conteneur saisi un serveur au hasard clans un ensemble,
rendant ainsi ce serveur non disponibl e pour les autres conteneurs. Le serveur sera retenu
pour la priode correspondant la va leur de l' attribut te mps de travail serveur qui a t
attribu e pralablement au conteneur. la fi n de cette priode, le conteneur relche le
serveur qui redevient disponible pour un autre conteneur. Ensuite, le conteneur passe par un
module d' affectation qui diminue de un le nombre serveurs occups po ur les oprati ons sur le
mode de transport.
La saisie des serveurs dans l'ensem ble de serveurs se fait au hasard, d une particul arit du
logiciel ARENA . En effet, lorsqu' un ensemble est cr, la rgle pour saisir un membre de cet
ensemble doit tre choisie pam1i les rgles existantes dans le logiciel. C'est pourquoi des
modu les d ' affectation et des variables dfinissant le nombre de serveurs occups ont du tre
utiliss pour imp lanter le sous-mod le d'oprations des serveurs. Le choix du serveur au
hasard a t utilis puisque les autres rgles de slection auraient entranes des choix de
serveurs par ordre de prfrence ou auraient eu le mme effet qu' une slection au hasard. Le
choix des serveurs par ordre de prfrence aurait t intressant si la rgle de prfrence avait
159
pu tre lie l'tat du terminal. En effet, ceci aurait permis de choisir les serveurs en fonction
de leur allocation. Par exemple, un serveur pour dcharger les trains aurait t choisi panni
les serveurs allous aux trains. Cependant ce n'est pas le cas, donc la rgle de saisie au hasard
s'avre la plus intressante dans cette situation.
La figure 6.14 prsente une photo de l'cran du sous-modle des oprations des serveurs. Le
premier groupe de modules au haut de l' cran reprsente les oprations des serveurs affects
aux trains, tandis que celui du bas reprsente les oprations sur les camions et celui du milieu
les oprations sur les conteneurs des navires.
En ce qUJ a trait aux oprations sur les navtres, le cheminement des conteneurs suit le
principe gnral, mais ces derniers sont pralablement tris en fonction de la ligne
d'appartenance et du rang d'arrive de leur navire de provenance. Selon qu'ils so ient
dchargs ou chargs sur un navire, les conteneurs se dirigeront ens uite vers le sous-modle
d' inventaire de la zone de stockage du terminal, dans le premier cas, ou vers le sous-modle
des grues de quai dans le second cas. La raison de ces cheminements est qu ' un co nteneur
dcharg du navire est ensuite entrepos dans une pile jusqu ' ce qu 'i l soit transfr vers un
autre mode de transpot1, tandis qu ' un conteneur retir de la pile est ensuite transport
jusqu'aux grues de quai pour tre charg sur le navire.
Les conteneurs dchargs des camions ou charger sur un camion suivent eux aussi le mme
type de cheminement. Un module de transfet1 supplmentaire cette pat1ie elu so us-modle
est utilis pour diminuer le nombre de connexions clans le modle. Les conteneurs qui sot1ent
de ce module proviennent du processus de chargement des camions. leur sot1ie du sousmodle d'oprations des serveurs, les conteneurs sont dirigs vers un module de dcision qui
les trie selon qu' ils soient chargs sur un camion ou dchargs d'un camion.
Le cas des oprations sur les trains est plus particulier. En effet, les conteneurs sont
manipuls deux fois dans chacun des processus de chargement et de dchargement, une fois
prs de la pile et une fois prs du train (voir le chapitre III qui dtaille le processus de
dchargement et de chargement des trains). C'est pourquoi la partie du sous-modle
160
d'oprations des serveurs qui reprsente les oprations sur les trains est plus complexe. Suite
leur s01tie du module de procd et la mise jour du nombre de serveurs occups, les
conteneurs sont tris par un module de dcision selon qu'ils fassent partie du processus de
dchargement ou de chargement des trains. Un autre module de dcision les trie ensu ite selon
qu ' il s'agisse de leur premier passage aux serveurs ou leur second. S' il s ' agit du premier, le
conteneur est retourn au sous-modle correspondant d' oprations sur les trains o la suite du
processus le fera revenir au sous-modle d'opration des serveurs.
S'il s'agit d'un conteneur dcharg d' un train, il est dirig vers le module de dcision elu
haut. Ce module de dcision le dirigera vers les modules de transfert s' il s' agit de son second
passage et vers la sortie elu sous-modle d' oprations des serveurs s' il s' ag it de son premier
passage. Dans ce dernier cas, le conteneur est redirig vers le sous-mod le de dchargement
des trains, tandis que dans le premier cas, il est dirig vers le so us-modle d' inventaire de la
zone de stockage du terminal.
Par contre, si le conteneur est un conteneur qui doit tre charg sur un train, le module de
dcision le dirigera vers le module de dlai s' il s' agit de son premier passage et vers le
module de transfert s' il s' agit de son second passage. Dans ce dernier cas, le conteneur est
redirig vers le processus de chargement des trains par les modules de transfert. Dans le
premier cas, le dlai appliqu au conteneur reprsente le temps de transport entre la pile de
conteneurs de la zone de stockage du terminal et le train sur lequel les conteneurs seront
chargs. Ensuite, le module d' affectation attribut un temps de travail pour le second passage
du conteneur aux serveurs et met jour l' attribut qui indique le numro de passage du
conteneur aux serveurs. Les modules de transfert qui suivent dirigent le conteneur vers le
module de transfert situ en amont de cette partie du sous-modle, afin qu'il soit trait une
seconde fois par les serveurs.
161
4!- Arana (Modele_final,:JHesentahon)
Th
~'
~~
-
~x
..
,-~------------
Figure 6.14 Sous-modle des oprations des serveurs.
6.4.8 Dpart des navires
En se rapportant la figure 5.3, qui reprsente le design du simulateur pour l'arrive et le
dpart des navires, il peut tre remarqu que les seu les tapes qui n' ont pas t couvertes sont
les dernires tapes du modle, soit la libration des grues de quai , des serveurs et du quai,
ainsi que le dpart du navire. Ces tapes sont reprsentes par deux sous-modl es 1' intrieur
de la simulation, soit le sous-modle de libration du quai et des grues de quai et le sousmodle de dpart du navire.
6.4.8.1 Libration du quai et des grues de quai
En se rapportant la description du sous-modle de chargement des navires, il peut tre
constat que le conteneur qui quitte le sous-modle lorsque le chargement est complt se
162
dirige vers le sous-modle de libration du quai et des grues de quai. son arrive, le
conteneur est tri par un module de dcision selon sa li gne d'appartenance. Ensuite, un
module de recherche identifie le navire sur lequel le conteneur a t charg, et le module de
retrait qui suit retire le navire de sa file d'attente dans le sous-modle d'allocation des grues
de quai. L'entit retire de la file d'attente est ensuite trie selon son rang par un modul e de
dcision et un module d' affectation ajoute les dernires heures travailles par les grues de
quai sm ce navire au nombre d'heures totales travailles sur ce navire. Cette entit est ensuite
dtruite par le module de disposition. Quant l'entit qui a initi la recherche, ell e se dirige
ensuite vers un autre ensemble de modules recherche-retrait afin de retirer le navire de la file
d'attente du sous-modle d'allocation des quais. L'entit retire est dtruite, tandis qu'un
dlai de 0,0001 seconde est appliqu l'entit originale. Ce dla i est ncessaire d une
particularit du logicie l ARENA qui a t voqu la section 6.4.4 .2. Dans le cas prsent,
sans le dlai, les statistiques sur les heures travailles par les grues de quai sur un nav ire sont
remises zro avant la mise jour qui suit le retrait des navires du so us- mod le d'allocation
des grues de quai. Suite ce dl ai, l'entit est trie selon le rang de son navire d ' appmtenance
et le module d' affectation qui suit remet zro les variab les dfinissant l' tat du navire a insi
que le nombre de grues alloues. Le dernier module du so us-modle ass igne un temps de
dpart au navire. L ' entit se dirige ensuite vers le sous-modle de dpa1t des nav ires. Tel
qu ' il peut tre constat sur la figure 6 .15 , le processus de libration des quais et des grues de
quai est le mme pour les nav ires des deux lignes, mais il doit tre spar puisque ce ne so nt
pas les mmes variables et files d' attente qui sont affectes par le processus.
L__
163
Figure 6.15 Libration du qu ai et des grues de qu ai.
6.4.8.2 Dpart des navires
Le sous-modle de dpart des navires complte le modle d' arrive des navires de la figure
5.3 du chapitre prcdent. L' implantation du dpart des navires dans la simulation a des
objectifs multiples. Tout d' abord, les statistiques sur les oprations de dchargement et de
chargement des navires doivent tre compiles, ensuite certaines variables doivent tre
rinitialises pour les navires suivants et, finalement, le systme doit disposer de l' entit,
puisque le nombre d' entit qui existe simultanment dans la simulation est limit.
Lorsqu' une entit se prsente dans le sous-modle de dpart des nav ires, elle passe par un
compteur qui enregistre les dparts de navires. Puis, un module d ' affectation met jour une
variable qui calcule le temps pass quai du navire. Un module d'criture inscrit ensuite une
164
srie de statistiques dans un fichier Excel externe la simulation. Les informations qui y sont
inscrites sont : la ligne d'appartenance du nav ire, le temps pass quai par le navire, le
nombre de conteneurs qui ont t dchargs et chargs, les heures travaill s par les grues de
quai sur ce navire, ainsi que le temps d ' arrive et de dpart du nav ire.
!!!' fje
Elk 'flew Tools Arrt!OQe Ob)ect RU! wn6ow Hltl
. . =t;. ft. .
-rro~g~r~-~T~2i~iT-:t
i. " " '
0 f> 0 A
. ..
. .. . . . ..~.-:. 8T-~. .~ fi!i"~i. ~r;-~ . -~;;;
~ - :~ iti;1-TPT~
i"'. ~ . ~. t <l!l !;; l'il1
UJ 0
1\' O!!l ..
l'!:
t ... '
Il i 1]
~ 1~ ~
. ~?
- f!l x
1) " i liJ t!J .... ! - li'ii
Figure 6.16 Dpart des navires.
Les modules de dcisions et d'affectation qui suivent sont utiliss pour ajuster des variables
avant le dpart du nav ire. Tout d'abord, diminuer de un la variable qui dfinit le nombre de
navires dans le systme de la ligne d' appartenance du navire qui quitte le terminal et, ensuite,
remettre zro les statistiques sur le nombre d' heures travailles par les grues de quai sur le
navire.
165
6.4.9 Arrive des trains
L' ensemble des sous-modles du simulateur prsents jusqu' maintenant portaient
principalement sur la simulation des activits qui concernent les navires, de l'arrive jusqu ' au
dpmi. Par contre, un terminal maritime de conteneurs constitue une plateforme de transfeti
entre divers modes de transport. C' est pourquoi la simulation doit aussi tenir compte des
autres modes de transpoti impliqus dans la chane de transport intennoda l.
Un premier mode de transport impliqu dans cette chane est le train. La figure 6.17 prsente
le sous-modle d ' arrive des trains. Les trains sont crs de faon alatoire par un module de
cration des entits. Les entits cres sont par la suite comptes avant qu 'un nom, un temps
d ' anive, ainsi qu un nombre de conteneurs dcharger et charger leurs soient assigns.
Tel que mentionn la section 6.1 , les arrives de trains sont gnres de faon alatoire,
mme si les trains arrivent quotidiennement au pori selon un horaire prdfini. Rappelons que
l'lment alatoire provient du fait que la livraison des wagons sur le terminal n'est pas
effectue par les transpotieurs ferroviaires leur arrive au port, mais bien par le port, qui
possde ses propres locomotives qu 'i l utilise cette fin.
166
Figure 6.17 Arrive des trains
6.4.10 Allocation d'une voie ferre aux trains
l'instar des navires, la capacit de rception des trains est aussi limite. En effet, tel que
mentionn la section 6.3 de ce chapitre, le terminal utilis pour l' implantation de la
simulation est muni de quatre voies ferres qui lui permettent de recevoir jusqu ' 10 000
pieds de wagons.
La simulation de ce processus se fait l'aide de modules de retenue des trains. Le premier
module de retenue, situ la gauche sur la figure 6.18, vise assurer que la som me des
entits retenues par les deux autres modu les de retenue est gal ou infrieure quatre. Cette
condition est ncessaire afin de respecter le nombre de voies ferres du terminal. Le module
de retenue suivant, quant lui, assure qu'un seul train est trait la fois. Il retient donc les
167
trains jusqu ' ce que le nombre d'entits dans la file d'attente du dernier module de retenu
soit infrieur un. Entre ces deux modules, un module d'affectation rinitialise les variables
qui reprsentent le nombre de conteneurs chargs et dchargs du train. Un module de
sparation cre des duplicatas du train qui sont transforms en conteneurs par le module
d' affectation qui suit. Ces duplicatas reprsentent les conteneurs dcharger de ce train. Le
module d'affectation leurs assigne aussi une suite d'attributs qui sont le numro de passage
aux serveurs, le temps de travail des serveurs ce premier passage, ainsi que la destination du
conteneur, dans ce cas-ci, un navire.
Figure 6.18 Allocation d' une vo ie ferre aux trains.
168
6.4.11 Dchargement des trains
Suite l'affectation d'une voie au train, les conteneurs sont dirigs vers le sous-modle
d'opration des serveurs. ce sous-modle, ils sont traits une premire fois, ce qui
reprsente la premire partie du processus de dchargement des trains illustr la figure 5.9
du chapitre prcdent. leur sortie de ce modle, les conteneurs sont dirigs vers le sousmodle de dchargement des trains, illustr la figure 6.19 de ce chapitre.
Les contenems passent tout d' abord par un module de dlai qui les retient pour une priode
de temps qui reprsente le transp01t du conteneur entre le train et la pile de la zone de
stockage. Un module d ' affectation incrmente ensuite la variable qui reprsente le nombre de
conteneurs dchargs du train. Le module de dcision qui suit vrifie si le nombre de
conteneurs dchargs est gal au nombre de conteneurs dcharger du train. Lorsque cette
condition est fausse, ce qui signifie que le dchargement du train n ' est pas complt, les
conteneurs sont dirigs vers un module d'affectation qui leurs assigne un nouveau temps de
traitement par les serveurs et modifie l'attribut du nombre de passage des conteneurs aux
serveurs. Ce nouveau temps de traitement est ncessaire, afin de reprsenter le transfett du
conteneur depuis le vhicule de transport inteme vers la pile. Rappe lons que ce vhicu le est
utilis pom le transport du conteneur du train vers la pile. Les modules de transfett qui
suivent dirigent le conteneur au sous-modle d' opration des serveurs. Lorsque la condition
est vraie, un duplicata du conteneur est cr et l'original est dirig vers un autre module de
sparation. Le duplicata, quant lui, suit le mme chemin que les autres conteneurs vers les
serveurs. Au second module de sparation, les conteneurs qui seront chargs sur le train sont
crs. Ces conteneurs se dirigent vers Je processus de chargement des trains, tandis que
1' original est dtruit par un module cie disposition.
----------
-- --
169
- " x
Il-
Figure 6.19 Dchargement des trains.
Tel qu'il peut tre remarqu sur la figure 6.19, le sous-modle de dchargement des trains
comporte aussi un module de transfert d'arrive, ainsi qu'un module d'affectation . Lorsque
les conteneurs ont effectus leur second passage au sous-modle d'opration des serveurs, ils
arrivent au sous-modle de dchargement des trains via ce module de transfert et le module
d' affectation ajuste l'inventaire de conteneurs de la zone de stockage. Le conteneur est
ensuite dirig au sous-modle d'inventaire.
6.4.12 Chargement des trains
Le processus de chargement des trains, dans la simulation, dbute avec un ensemble de
modules recherche-retrait. Cet ensemble est utilis pour retirer de la zone de stockage les
conteneurs qui sont chargs sur le train. C'est pourquoi ils sont ensuite dtruis par un module
170
de disposition. Les originaux passent par la suite par un module d'affectation, o un temps de
travail du serveur leur est assign, ainsi qu ' un attribut qui les dfinis comme conteneurs
charger sur train et qui spcifie qu'il s'agit de leur premier passage au sous-modle
d'opration des serveurs. C'est d'ailleurs vers ce dernier qu ' ils sont transfrs par les
modules de transfert.
~.
Figure 6.20 Chargement des trains.
Suite un premier passage aux serveurs, les conteneurs sont redirigs vers le sous-modle de
chargement des trains par des modules de transfert. Le troisime module de transfert, nomm
Arrive des serveurs, constitue le point d' arrive de ces entits. Le module d'affectation
augmente de un le nombre de conteneurs chargs sur le train, avant qu ' un module de dcision
teste si ce nombre est gal au nombre de conteneurs charger. Lorsqu'il s'agit du dernier
171
conteneur, il est spar et l' original initie ensuite le processus de libration de la voie ferre.
Le duplicata, de son ct, suit le mme chemin que les autres conteneurs et il diminue
l' inventaire de conteneurs via un module de disposition, avant d 'tre dtruit par un module de
disposition.
6.4.13 Libration de la voie ferre
La figure 6.21 illustre le sous-modle de libration de la voie ferre. Le dernier conteneur
charg sur le train initie ce processus.
Figure 6.21 Libration de la vo ie ferre
Ce sous-modle est relativement simple. Un module de recherche identifie d'abord le train
qui est ensuite retir de la file d'attente du modu le de retenue du processus d'allocation des
172
voies ferres aux trains. L ' entit retire est ensuite dtruite par un module de disposition,
tandis que l' original poursuit son cheminement vers le sous-modle de dpart des trains. Un
compteur ainsi qu ' un module de disposition ont t ajouts afin de relever une erreur qui se
produirait dans ce processus.
6.4.14 Dpart des trains
Lors du dpart d'un train, le temps qui a t ncessaire son traitement par le terminal est
calcul et lui est assign comme attribut, avant qu ' un module d' criture inscrive cette donne
ainsi que le nombre de conteneurs qui ont t dchargs et chargs sur ce train dans un fichier
Excel externe la simulation. Finalement, un module de disposition dtruit l' entit.
~ Afena [Modete_fmal_pr~ttl4hon}
f' Fte
m~
Ecl: V!ew Tools Arr~e Objec:t P.lr! ~ ~
Ii?~~ ioiT~ #"~i.t:ii ct, ~- ~~~;;j g T:O i~~~: :;r~ ~ ~,~I!~~ '!J !mm
!i " "
"> c' 0 f>
i .1. ~ ~
i <'1!1 :: l'?il
JI 0 Il'
i l1!l J
l'h. i'!i ! iii ' Ill
m-
li . ~olt
Figure 6.22 Dpart des trains.
mm . .....
./ j lil
o1'J ""
~y ..
o0
!i'ii
~x
l_---
173
6.4.15 Arrive des camions
L'autre mode de transport avec lequel le terminal doit traiter est le camion. La simulation des
arrives de camions au terminal revt un caractre particulier, puisque contrairement aux
autres modes de transp01t, les oprations sur les camions ne se font pas en tout temps. En
effet, les camions sont reus au terminal du lundi au vendredi entre buit heures et seize
heures, tel que mentionn la section 6.3 .2.
Tel que mention11 la section 6.1 de ce chapitre, un e hypothse a t pos en ce qui a trait
l'anive des camions au terminal, d un manque de donnes relles. En effet, il a t
postul la section 5.2 du chapitre prcdent, que tout les cam ions qui se prsentent au
terminal dchargent un conteneur l' arrive et chargent un autre conteneur avant de quitter le
terminal. En ralit, une proportion de camions se prsente au terminal charg d' un conteneur
et repart vide. Le contraire se produit aussi. Par contre, puisqu'aucunes donnes n'taient
disponibles ce sujet, cette hypothse a t pose. De plu s, ce manque de donnes a ncess it
de gnrer les atTives de camions selon une moyenne quotidienne estime par les dirigeants
du terminal. En ralit, le nombre de camions qui se prsente au terminal quotidi ennement est
li l' arrive des navires. Plus prcisment, Je nombre de conteneurs livrs au tenninal
augmentera en se rapprochant de la date d' anive prvue du navire. Une proportion
importante des conteneurs arrivera
donc au terminal dans les derniers jours prcdant
l'arrive du navire. La situation est inverse en ce qui concerne la cueill ette des conteneurs
dchargs des navires . En effet, une prop01tion imp01tante des conteneurs sera cueillie dans
les premiers jours suivant la fin des oprations de dchargement du navire et cette prop01tion
diminuera les jours suivants, jusqu ' ce que la totalit des conteneurs soit cueillie.
Les sous-sections 6.4.15 .1 et 6.4.15 .2 prsentent l' implantation effectue pour simuler
l'atTive des camions au terminal, tandis que la sous-section 6.4.15.3 explique l' implantation
qui aurait pu tre effectue si des donnes suffisantes avaient t disponibles.
174
6.4.15.1 Horaire des camions
Afin de reprsenter ces arrives qui doivent tenir compte de la j ourn e de la semaine et de
l' heure de la j ourne, un sous-modle dfini ssant ces vari ables du tre cr. Ce modle est
illustr la fi gure 6.23.
Variable: Journe de la semaine
Variable: Heure de la journe
Fig ure 6.23 Horaire des camions.
D 'abord, le sous-modle est compos de deux parties. La partie du haut est util ise pour la
dfinition des journes, tandis que la partie du bas est util ise pour la dfinition de l' heure de
la journe.
Pour la dfinition des journes, une entit de contrle est cre au dbut de la simu lation . La
variable
<~ourne
de la semaine a initialement une valeur de zro. Le module d'affectation
175
qui suit le module de cration est util is pour incrmenter de un cette variable. Un module de
dlai retient ensuite 1'entit pour une priode de vingt-quatre heures et la relche lorsque cette
priode est coule. Puis, le module de dcision vrifie que la valeur de la variable est
infrieure sept, dans lequel cas l'entit est retoume vers le module d'affectation en amont
elu sous-modle. Lorsque la variable atteint une valeur de sept, l'entit de contrle est diri ge
vers le module d'affectation en aval du sous-modle, o une valeur de zro est attribue la
variable
<~ourne
de la semaine avant gue le module d'affectation en amont la modifie pour
une valeur de un.
Pour ce qui est de la dfinition de l' heure de !ajo urn e, le principe est le mme, l'exception
que le dlai est de une heure et la valeur maximale que peut atteindre cette variable est de
vingt-quatre. De plus, des modules d'criture ont t ajouts afin d' inscrire le niveau
d' inventaire ainsi que le nombre de camion gui se sont prsents au terminal la fin de
chaque journe.
6.4.15.2 Arrive des camions
L 'atTive des camions dans un terminal maritime de conteneurs est caractrise par des
phnomnes cycliques . En effet, une journe typique est gnralement constitue de trois
priodes de pointe d'arrives des camions. Une premire l'o uve1ture du terminal le matin
huit heures, une seconde en dbut d 'aprs-midi vers treize heures et une dernire moins
imp01tante en fin d'aprs-midi vers quinze heures. Cette distribution des aiTives des camions
au terminal a d' ailleurs t confm11e par l' tude de Bebenek (2006).
Afin de reprsenter cette distribution des arrives, une entit est cre en dbut de simulation
et elle sera retenue jusq u' ce gue deux conditions soient valides simultanment. La
premire est gue la journe de la semaine soit comprise entre deux et six (lundi et vendredi)
et la seconde, que 1' heure de la journe soit comprise entre huit heures et seize heures. Dans
le sous-modle, ces conditions sont vrifies par des modules de retenu qui retiennent les
entits jusqu' ce qu 'elles soient vraies (figure 6.24). Lorsque les deux conditions sont
vrifies, l' entit est spare et une anive de camions est constitue par le duplicata. L'entit
originale, quant elle, est dirige vers un module de dcisions, qui la dirigera vers l'un ou
176
l'autre des modules de dlai en fonction de l' heure de la journe. En effet, si la variable
heure de la journe est gale huit ou treize, le dlai sera plus court, afin que les arrives
de camions soient plus rapproches, tandis que si la variable est gale quinze, le dlai sera
plus long. Ce dlai sera encore plus important si la variable a une valeur autre que huit, treize
ou qumze.
Figure 6.24 Arri ve des camions.
Lorsqu'un camion est cr par le module de sparation, un module d ' affectation lui attribue
un temps de traitement par les serveurs, ainsi qu ' un attribut qui indique qu ' il s'agit d ' un
camion charg qui doit tre dcharg. De plus, le module d'affectation incrmente la variable
qui enregistre le nombre d'arrives de camions pour la journe, ainsi qu'une variable qui
mesure le nombre de camions qui se trouvent l' intrieur du terminal. Si cette dernire
177
variable est suprieure vingt-cinq, le nombre de serveurs requis pour les oprations sur les
camions sera augment deux. Ainsi, lors de la prochaine rallocation des serveurs, un
serveur supplmentaire sera affect aux camions. Autrement, le nombre de serveurs requis est
maintenu un. Le module de procd qui suit reprsente les oprations de la gurite, tandis
que le module de dlai qui le suit reprsente le temps de voyagement du camion jusqu ' la
pile de contenems. Suite ces dlais, le camion se dirige vers le sous-modle d'opration des
serveurs o il sera trait et ensuite redirig vers le sous-modle de dchargement des
camions.
6..4.15.3 Arrives des camions avec horaire des navires
Tel que mentionn la so us-section 6.4.15, 1' implantation prcdemment prsente constitue
une limite du modle de simulation dvelopp. Afin de remdi er cette limite, des donnes
relles concemant les anives de camions auraient t ncessai res, pour estimer la rpattition
des arrives des camions en fonction des arrives de navires.
L'implantation de ces anives aurait ncessit de modifier le sous-modle d' arrive des
navires. En effet, afin de lier les anives de camions aux arrives de navires, un horaire
d 'arrive des navires doit tre gnr. Cet horaire peut tre gnr l' extrieur de la
simulation et transcrit dans un fichier texte lu par la simulation, comme il a t fait pour le
processus d'allocation des serveurs (voir sous-section 6.4.7). partir de cet horaire, les
arrives de camions au terminal sont gnres en fonction de la date d'arrive prvue du
navire. La gnration de ces arrives consiste appliquer la di stribution obtenue partir des
donnes relles au nombre de conteneurs charger sur le navire. Ce nombre de conteneurs
est gnr de la mme faon qu'il a t prsent la sous-section portant su r les arrives de
navires, soit en utili sant les distributions extraites des d01mes relles. Par contre, afin de ne
pas perdre l'aspect alatoire des arrives de navires, tm module de dlai doit tre plac suite
la cration des navires, afin de reprsenter les variations qui se produisent en ralit par
rapp01t 1' horaire prvu par le transp01teur maritime.
178
Pour ce qui est des cueillettes de conteneurs suite l'arrive des navires, la gnration des
arrives de camions est plus simple, puisqu'il s'agit d'appliquer la distribution obtenue des
donnes relles, jusqu' ce que tous les conteneurs soient livrs.
- " x
{1[10 ;(30.tis7Hous)rWsdoi,Mo7tZ,2006 --
For ~, press FI
R~ ...
{s7 t3,6032) .
6.25 Dchargement des camions.
6.4.16 Dchargement des camions
Le sous-modle de dchargement des camions est relativement simple. En effet, il est
compos d'un module de sparation, qui est utilis pour gnrer le conteneur dcharg du
camion, d'un module d'affectation qui change le type de l'entit duplique pour en faire un
conteneur et d'un module de dlai qui reprsente le temps de voyagement du camion entre
son point de dchargement et de chargement sur le terminal. De plus, le passage de l'entit au
module d'affectation incrmente l'inventaire de conteneurs du terminal. Le conteneur
179
nouvellement cr se dir ige d'ailleurs vers le sous-modle cl' inventaire de la zone de stockage
suite sa sottie du sous-modle de dchargement. Ce demier sous-modle est reprsent la
figure 6.25.
6.4.17 Chargement des camions
La figure 6.26 reprsente le processus de chargement des camions. L'ensemble de modules
recherche retrait, situ la gauche de la figure, est utilis pour soustraire de 1' inventaire le
conteneur qui sera charg sur le camion. Une fois retir de l'inventaire, le conteneur se fait
assigner un temps de travail pour le traitement par les serveurs, ainsi qu'un attribut qui
spcifie qu'il s' agit d' un conteneur charger sur un camion. Il est ensuite dirig vers le sousmodle d'opration de serveurs par les modules de transfert qui suivent le module
d'affectation. Suite son traitement par les serveurs, le conteneur revient au sous-modle de
chargement des camions par le point d'entre infrieur gauche de la figure.
Les combinaisons de modules d'affectation et de compteurs situs en parallle ont la mme
fonction. Le premier compte les entits qui passent tandis que le second attribue un numro
de chargement quivalent la valeur du compteur. Ains i, lorsqu'un camion et un conteneur
en file d'attente au module de groupement ont le mme numro de chargement ils sont
groups et le chargement du camion est complt. Le camion charg quitte ensuite ce sousmodle et se dirige vers le sous-modle de dpart des camions.
180
~x
~?
! El ~"' o~~ ir'ii l
Figure 6.26 Chargement des camions.
6.4.18 Dpart camions
Le sous-modle de dpart des camions, qui est reprsent la figure 6.27, comporte peu de
modules. Le tout premier module d' affectation diminue de un la valeur de la variable qui
reprsente le nombre de camions prsent l' intrieur du terminal. Le module suivant compte
le nombre total de camions qui ont quitt le terminal au cours de la simulation. Finalement,
un dernier module dispose du camion .
181
Figure 6.27 Dpart des camions.
6.4.19 Inventaire de la zone de stockage du terminal
Le sous-modle d ' inventaire de la zone de stockage du terminal utilise des modules de
retenue pour reprsenter les diffrentes catgories de conteneurs en provenance et
destination des divers modes de transport. Ces modules sont au nombre de quatre. Le module
suprieur de la figure 6.28 reoit les conteneurs en provenance du sous-modle de
dchargement des camions, tandis que celui du bas, les conteneurs en provenance du sousmodl e de dchargement des trains. Les conteneurs dchargs des navires, quant eux,
arrivent par le point d 'entre du milieu du sous-modl e. Ces conteneurs sont ensuite
distribus vers les deux autres modules de retenue par un module de dcision envoie 55% des
conteneurs vers les dparts par train et les 45% restants vers les dparts par camion. Cette
distribution des conteneurs vise encore une fois respecter les proportions estimes par les
182
dirigeants du terminal qut constitue l'tude de cas de cette simulation . Les modules
d'affectation situs la suite du module de dcision attribuent le mode de dpart des
conteneurs et incrmentent 1' inventaire de conteneurs. Les modules de cration situs prs
des modules de retenue sont utiliss au dbut de la simulation afin de gnrer l' inventaire de
dpart.
Figure 6.28 Inventaire de la zo ne de stockage du terminal.
6.5 Conclusion
Ce chapitre a montr de quelle faon le design d'un simulateur dvelopp au chapitre
prcdent a t implant pour simuler les activits d' un terminal portuaire de la cte Est
canadienne l'aide du logiciel de simulation ARENA . Le chapitre suivant utilisera ensuite
183
cette implantation afin de faire des exprimentations sur le simulateur. Par contre, avant
d'exprimenter, les donnes utilises seront prsentes afin de valider le modle dvelopp.
CHAPITRE VII
VALIDATION
Suite l' implantation de la simulation prsente au chapitre prcdent, ce chapitre a deux
principaux objectifs. Dans un premier temps, il vise prsenter les donnes qui ont t
utilises pour la mise en uvre de la simulation et, dans un deux ime temps, il vise valider
l'implantation en prsentant quelques tests effectus sur le simu lateur. L'organi sation du
chapitre est la suivante : la section 7. 1 prsente les dmmes utili ses pour effectuer les rond es
de simulation ainsi que la provenance de ces donn es, la section 7.2 prsente les aj ustements
et les tests effectus afin de calibrer et de valider le modle, tandi s que la sectio n 7.3 conc lu e
avec des commentaires sur les rsu ltats obtenu s des rondes de simulation de la va lid ation et
prsente des amliorations qui pourraient tre apportes au simulateur afin de le rendre plu s
prcis et plus reprsentatif.
7.1 Analyse des donnes
Les donnes utilises pour implanter la simulation proviennent de deux sources principales.
Les rapports de production produits suite aux dpa1ts des navires constituent la premire
source, tandis que des estimations des temps de travail proposes par les dirigeants du
tenninal constituent la seconde source. En effet, bien que les rapports de production aient
permis d' extraire une quantit importante d'informations, cell es-ci se sont avres
insuffisantes pour mener termes la simulation.
Les donnes obtenues de la premire so urce pmtent sur les oprations de dchargement et de
chargement des navires. Ces donnes sont : Jes dates d' arrive et de dpart des navires, le
nombre de conteneurs dchargs et chargs sur le navire au terminal, le nombre d'heures
travaills par chacune des grues sur le navire ainsi que le nombre de conteneurs dchargs et
chargs par chaque grue. Les donnes utilises proviennent des rapports de productivit des
navires pour les mois de juin, juillet et aot de l' anne 2006. Bien qu ' une quantit de donnes
plus impo1tante de do1mes aurait t intressante afin d' observer s'il existe des effets de
185
saisonnalit, il a t choisi de retenir ces trois mois d'opration, puisque le terminal a subi
d'importants changements au cours de l'anne 2006, qui ont pe1turb de faon imp01tante le
cours normal des oprations. II a t jug que ces trois mois sont plus reprsentatifs de la
situation nonnale du terminal, puisque la situation s'est stabilise avant et au cours de cette
priode.
Quant aux donnes obtenues de la seconde source, il s'agit d'estimations des dirigeants sur
les oprations de la zone d'opration terrestre du terminal. En effet, ceux-ci ont estim le
nombre moyen de camions servis par le terminal chaque jour, la quantit de conteneurs
dchargs et chargs sur les trains quotidiennement, ainsi que la distribution des conteneurs
vers et en provenance des autres modes de transport.
Les prochains paragraphes visent prsenter les diffrentes distributions statistiques utilises
pour reprsenter les activits du terminal. Puisque certaines donnes n'taient pa s
disponibles, des hypothses ont t poses pour ce1taines distributions utilises. Dans chacun
de ces cas, les hypothses poses seront prsentes et les donnes qui aura ient dues tre
utilises pour dtenniner ces distributions seront exp liques.
7.1.1 Choix des distributions alatoires
Afin de simuler le temps ncessaire aux diffrents quipements du terminal pour
manutentionner les conteneurs, les dotmes issues des ra ppotts de production ont t
analyses l' aide du logiciel ARENA Input Analyzer. Ce logiciel est un outil inclus dans la
version 8.1 du logiciel ARENA. L ' utilisation du Input Analyzer permet de comparer une srie
de donnes un ensemble de distributions alatoires afin d'identifier celle qui reprsente le
mieux les d01mes observes. Le logiciel trace d' abord un histogramme partir des donnes,
pour ensuite valuer la concordance des dom1es et des distributions alatoires.
Dans le but de mesurer cette concordance, deux mesures sont utilises par 1 outil d'analyse.
Dans un premier temps 1' erreur carre moyenne par rapports aux donnes relles est calcule
pour chacune des distributions. Cette mesure correspond la moyenne des cmts entre la
186
frquence relative observe dans chacune des cellules de 1'hi stogramme et la frquence
relative de la distribution conespondante (Kelton et col. 2004).
Dans un second temps, le degr de correspondance pour chacune des distributions est calcul
l'aide du test de Kolmogorov-Smirnov. Le rsultat de ce test est une valeur s itue entre un
et zro pour un paramtre p qui permet de tester l'hypothse nu lle (Ho) qui affirme que deux
distributions sont issues de la mme fonction de distribution alatoire. Une valeur de p
infrieure 0,05 indique une faible concordance entre les donnes et la distribution, tandis
qu ' une valeur suprieure 0, 10 est considre comme dmontrant un e bonne correspondance
entre les deux sries de donnes et valide H 0. Il est important de mentionner que le test de
Kolmogorov-Smirnov ne constitue pas une preuve de la concordance des donnes, mai s une
absence de preuve du contraire (Kelton et co l. 2004). C'est pourquoi le choix des
distributions ne s'appuie pas seulement sur cette va leur, ma is aussi sur l' erreur carre
moyenne. Pour l'ensemble des distributions retenu es, la valeur du paramtre p tait
suprieure 0,1 5.
7.1.2 Arrive des navires
Afin de simuler une anne complte d'oprations, il s'avre ncessaire de gnrer
alatoirement des arrives de navires, puisque les donnes provenant du terminal co uvrent
une priode de trois mois. Pour ce faire, les temps entre les arrives des navires, issus des
donnes du terminal, ont t analyss l'aide de l' outil d'analyse du logiciel de sim ulation,
afin d' en tirer des distributions alatoires. Les tab leaux 7. 1 et 7.2 prsente l'etTeur carre
moyenne obtenue pour chacune des distributions associes aux donnes. La distribution ayant
obtenue l'erreur carre moyenne le plus faible a t retenue, clans chacun des cas, puisque
plusiews distributions ont affich une valeur de p suprieure 0, 15 pour le test de
Kolmogorov-Smirnov. Les temps entre les arrives des navires de la ligne un sont clone
simuls par une distribution alatoire normale ayant une moyenne de 160 heures et un carttype de 60 heures. Tandis que les temps entre les arrives de navire de la ligne deux seront
reprsents par une distribution alatoire triangulaire ayant pour minimum 84 heures, 173
heures pour mode et 244 heures pour maximum.
187
Fonction
Erreur carre
Fonction
Erreur carre
Normale
0.00888
Triangulaire
0.0459
Be ta
0.01760
Normale
0.0553
Uniforme
0.03080
Un iforme
0.0893
Triangulaire
0.03300
Be ta
0.0996
Ex~onentielle
0.05700
Ex~onentielle
0.1360
Erlang
0.05700
Erlang
0.1360
Gamma
0.09380
Weibull
0.1800
Wei bull
0.09500
Gamma
0.1850
Lo~normale
0.14000
Lo~normale
0.2360
Tableau 7.2 Erreurs carres moyennes des
di stributi ons pour le temps entre les arrives de
navire de la ligne2.
Tableau 7.1 Eneurs carres moyennes des
di tri butions pour le temps entre les arrives de
navire de la ligne !.
7.1.3 Temps de traitement des grues de quai
L'estimation des temps ncessaires aux grues pour charger ou dcharger un conteneur a t
faite prutir de la premire source de donnes. En effet, les productions moyennes des
navires (en conteneurs/heure) ont t transfom1es en temps moyens (en heures) pour le
mouvement d' un conteneur. partir de ces temps moyens, des distributions alato ires ont t
assoc ies chacune des grues l'aide de l'outil d'ru1alyse du logiciel de sim ul ation. Les
temps de traitement estims sont exprims en heures, puisque l' unit de base de la simulation
est l' heure.
Numro de la grue
Fonction
0.03 + LOGN (0,0116; 0,00532)
0.02 + LOGN (0,13 1; 0,00186)
0.03
+ 0.02 *BETA (8,7; 8,49)
Tableau 7.3 Fonctions des di stributions alato ires des grues de quai.
Le temps de traitement associ au mouvement d'un conteneur varie d' une grue l'autre. En
effet, la grue numro deux affiche des temps de traitement moyens plus rapides que les deux
autres grues. Cette diffrence provient elu fait qu ' il s'agit d' une grue beaucoup plus rcente
que les deux premires. Cette demire a t acquise en 2004 par Je tenninal tru1dis que les
- - - -- - - - - - -
188
deux autres ont t acquises il y a plus de vingt ans. L 'quation reprsentant la fonction de
distribution alatoire associe chacune des grues est prsente dan s le tab leau 7.3.
Fonction
Erreur carre
Fonction
Erreur carre
Log normale
0.0208
Log normale
0.000153
Erlang
0.0314
Normale
0.000725
Gamma
0.0315
Weibull
0.001080
Wei bull
0.0493
Be ta
0.001090
Triangulaire
0.0593
Erlang
0.026600
Be ta
0.0640
Gamma
0.027100
Normale
0.0734
Triangulaire
0.125000
Uniforme
0.1490
Uniforme
0.309000
Exeonentielle
0.1510
Exponentielle
0.403000
Tableau 7.4 Erreurs carres moyennes des
distributions pour le temps de traitement de la grue
1.
Tableau 7.5 E rreurs carres moyennes des
distribu ti ons pour le temps de traitement de la grue
2.
Les tableaux 7 .4, 7.5 et 7 .6, prsentent les erreurs carres moyennes pour chacune des
distributions associes aux d01mes sur les temps de travail des grues de quai. Puisque, dans
chaque cas, plusieurs distributions ont obtenu une valeur de p supri eure 0,15 pour Je test
de Kolmogorov-Smimov, nous avons choisi d' utiliser la distribution possdant 1'erreur carre
moyenne la plus faible pour reprsenter les temps de traitement des grues . Ces di stribution s
ont t, ensuite, testes dans quelques rondes de simulation initiales qui ont permis de valider
leur reprsentativit du systme (voir sous-section 7.2).
Fonction
Erreur carre
Be ta
0.0061
Erlang
0.0111
Gamma
0.0114
Normale
Log normale
0.0125
0.0141
Wei bull
0.0160
Triangulaire
Uniforme
0.0855
0.2560
Exeonentielle
0.3320
Tableau 7.6 Erreurs carres moyennes des distributions pour
le temps de traitement de la grue 3.
189
7.1.4 Plans de chargement des navires
Puisque les donnes obtenues du terminal ne couvrent qu'une priode de trois mois, il a t
ncessaire de gnrer des plans de chargement des navires pour les simulations dont la dure
dpasse cette priode. Ainsi, des distributions alatoires ont t dtermines pou r le nombre
de conteneurs dcharger des navires provenant des lignes un et deux, de mme pour le
nombre de conteneurs charger sur ces groupes de navires. Le tableau 7.7 prsente les
distributions retenues pour chacun des plans de chargement des navires.
Plan de chargement
Fonction
Nombre de conteneurs dcharger navires ligne 1
NORM (1.12e + 3; 154)
Nombre de conteneurs dcharger navires ligne 2
NORM (31 0; l 09)
Nombre de conteneurs charger navires ligne 1
816 + 435*BETA (0,542; 0,551)
Nombre de conteneurs charger navires ligne 2
332 + WEIB (51 ,8; 0,7)
Tableau 7.7 Fonctions des di stributions alatoires pour les plans de chargement des navires.
Par contre, cettaines modifications ont t app01tes ces distribution s. E n effet, la valeur
obtenue chaque arrive de navire est arrondie l'entier le plus prs, puisqu ' il s'agit de
distributions continues, tandis que les quantits de conteneurs doivent tre di scrtes . De plus,
les premiers tests sur le simulateur ont montr que la distribution utilise pour le nombre de
conteneurs charger sur les navires de la ligne deux pouvait occasionnellement (plus ou
moins une fois par 100 navires gnrs) retourner des valeurs suprieures 600 conteneurs.
Ces valeurs sont difficilement applicables, puisque la taille des navires sur cette ligne ne
permet pas de transporter un nombre de conteneurs aussi important. En effet, bien que la
capacit des navires sur la seconde ligne soit de 1 000 EVP, la valeur la plus impottante
retrouve panni les donnes relles est de 581. Cette donne constitue un nombre total de
conteneurs sur le navire et ne tient pas compte de la taille des conteneurs (20 ou 40 pieds).
Exprime en EVP, cette quantit reprsente 1005 EVP (157 x 20 ' et 424 x 40 ' ).
190
Fonction
Erreur carre
Fonction
Erreur carre
Normale
0.0210
Uniforme
0.0361
Be ta
0.0290
Normale
0.0507
Uniforme
0.0308
Triangulaire
0.0620
Triangulaire
0.0330
Exeonentielle
0.1 060
Exeonentielle
0.1 030
Erlang
0.1 060
Erlang
0.1030
Be ta
0.1160
Weibul l
0.1260
Gamma
0 1500
0.1590
Gamma
Lognormale
0.2340
Tableau 7.8 Eneurs carres des distributions pour
le nombre de conteneurs dcharger des navires de
la ligne 1.
Fonction
Erreur carre
0.1510
Wei bull
Lognormale
0.1960
Tableau 7.9 Erreurs carres des distri butions pour
le nombre de conteneurs dcharger des navires de
la ligne 2.
Fonction
Erreur carre
0.00731
Beta
0.0249
Weibull
Uniforme
0.0308
Gamma
0.0214
Exponentie lle
Erlang
0.0691
0.0691
Erlang
Exponentielle
0.0242
0.0242
Normale
0.0718
Log normale
0.0598
Gamma
0.1030
Be ta
0.0752
Triangulaire
0.1040
Weibull
0.1080
Triangulaire
Normale
0.2020
0.2040
Lognormale
0.1430
Tableau 7.10 Erreurs caJTes des distributions pour
le nombre de conteneurs charger sur les navires cie
la ligne 1.
0.2860
Uniforme
Tablea u 7.11 Erreurs carres des di stributions pour
le nombre de conteneurs charger sur les nav ires de
la ligne 2.
191
Les tableaux 7.8 7.11 prsentent les erreurs carres moyennes pour chacune des
distributions appliques aux donnes obtenues du terminal en ce qui a trait aux quantits de
conteneurs sur les navires. Le choix de la distribution s'est fait selon les mmes critres
utiliss pour les temps de travail des grues de quai, plusieurs distributions ayant obtenues une
valeur suprieure 0,15 pour le paramtre p du test de Ko lmogorov-Smirnov.
7.1.5 Temps de travail des serveurs
Les donnes prcdemment prsentes proviennent toutes de donnes re ll es recueillies par
le tenninal des fins de contrle des oprations. Par contre, cettains temps de travail ne
peuvent tre gnrs partir de donnes existantes, puisque le terminal ne garde pas de
donnes de la sotie dans ses rappotis de production. C' est le cas des temps de travail des
serveurs utiliss pour la manutention des conteneurs. Afin de palier ce manque de donnes,
il a t choisi de poser l' hypothse que le temps de traitement des serveurs peut tre
dtermin en liant le nombre de grues de quai affectes aux nav ires et le nombre de serveurs
allous pour le traitement des conteneurs dchargs et/ou chargs sur ces navires.
Plus prcisment, il a t choisi d' utiliser une distribution de type triangulaire avec comme
paramtres des temps issus d'approximation utilisant les productions moyennes des grues de
quai et le nombre de serveurs affects aux navires . Plus prcisment, les productivits brutes
observes ont t multiplies par les diffrentes possibilits d' affectation de grues de quai (1,
2 ou 3), pour ensuite diviser les nombres de serveurs requis pom chacune de ces affectations
par le nombre de conteneurs J' heure qui doivent tre traits. Le tableau 7.12 prsente les
valeurs obtenues pour ce premier cas d'utilisation des serveurs.
Nombre de grues de
quai
1
2
3
Nombre de serveurs
requis
4
6
8
Minimum
Mode
Maximum
0,130
0,100
0,089
0,180
0, 136
0,121
0,220
0,167
0,148
Tableau 7.12 Mini mum. mode et maximum pour une distribution alatoire triangu laire des temps de travail des
serveurs lors du dchargement des navires.
192
Le nombre de conteneurs traiter par les serveurs provient des dmmes sur la production
horaire brute des grues de quai. La production brute reprsente le nombre moyen de
conteneurs dchargs par heure. La diffrence avec la production nette est que cette dernire
soustrait au temps de travail les dlais occasionns pour l'ouverture des cales des nav ires, la
cueillette des ancrages de soutien des conteneurs (twist lock pins) et autres dlais dont le
terminal n' est pas responsable. Il a t choisi d' utiliser les donnes de la production brute,
puisqu ' ils reprsentent plus fidlement le nombre de conteneurs qui doivent tre
manutentionns par les serveurs pour une priode d' une heure. partir de ces donnes, le
maximum, Je minimum et le mode ont t identifies, afin de calculer les temps de travail.
Ces donnes reprsentent respectivement 30, 18 et 22 conteneurs par heure.
En ce qui a trait l'estimation des temps de travail des serveurs lors du chargement des
navires, le calcul effectu est le mme, l' exception que le nombre de serveurs utili ss a t
ajust pour reflter la ralit. Les rsultats obtenus sont prsents au tableau 7.13.
Nombre de grues
de uai
2
3
Nombre de serveurs requis
Minimum
Mode
Maximum
2
4
0,033
0,033
0,044
0,045
0,045
0,066
0,055
0,055
0,074
Tableau 7.13 Minimum, mode et maximum pour une distri bution alatoire tri angulaire des temps de trava il des
serveurs lors du chargement des navires.
Pour ce qui est des temps de travail des serveurs lors des opration s de chargement et de
dchargement des trains, le minimum, le max imum et le mode ont t calculs partir
d'estimations des dirigeants du terminal. En effet, d' aprs leur exprience, la manutention de
300 conteneurs pour un quart de travail de huit heures reprsente une bonne production. Il a
donc t choisi de partir de cette production pour tablir le minimum, le maximum et le
mode. Cette production reprsente en termes de conteneurs par heure une production de 37,5
conteneurs/heure. Puisque, des quatre serveurs ncessaires ces oprations, deux travaillent
directement sur le train, leur production moyetme individuelle est de 18,7 5 conteneurs/heure.
Cette donne a donc t retenue comme production maximale. partir de celle-ci, il a t
statu, avec les dirigeants du tenn inal, qu' une producti on de 16 conteneurs/heure pour le
193
mode et de 12 conteneurs/heure pour le minimum semblait ralistes. Ces donnes ont ensuite
pennis de calculer les temps de travail des serveurs de la mme manire que dans le cas des
serveurs travaillant sur les conteneurs des navires. Les donnes obtenues sont les su ivantes :
0,054 heures pour le temps minimum, 0,0625 heures pour le mode et 0,084 heures pour le
temps maximum.
Le nombre moyen de camions pour une journe de travail reprsentant environ 300 camions,
ii a t choisi d'utiliser les mmes donnes pour le temps de travail des serveurs affects aux
camions. Par contre, il importe de mentionner que ce nombre reprsente les mouvements de
camions et non le nombre physique de camions. Plus prcisment, un camion se prsentant
au terminal et dchargeant un conteneur et en chargeant un autre avant de quitter est
considr comme deux mouvements de camions. Pui sque la distribution alatoire triangulaire
des trains repose sur la manutention de 300 conteneurs dans une journe et que le nombre
moyen de camions traiter par jour est d'environ 300, il semble logique, premire vue,
d'utiliser les mmes temps de traitement.
Tel que mentionn en introduction de cette section, les distributions calcules proviennent
d'une hypothse sur l' utilisation des serveurs lors des oprations sur les navires. Afin
d'obtenir des distributions plus reprsentatives des oprations relles, deux possibilits
peuvent tre envisages. Dans un premier temps, une premire possibilit consiste effectuer
des mesures sur place du temps d'oprations des serveurs, pour ensuite associer une
distribution ces donnes. Dans un second temps, la distribution aurait pu tre dtermine
partir de rappmts de production semblables ceux effectus pour les navires. En effet, ces
rapports de production indiquent le nombre conteneurs dchargs et chargs ainsi que le
nombre d'heures travailles. Ainsi, la productivit moyenne des oprations sur les trains
aurait pu tre calcule, et le temps de travail d' un serveur pour un mouvement de conteneur
estim.
7.1.6 Temps de dplacement des camions l'intrieur du terminal
Bien qu ' il ait t choisi d 'assumer que le nombre de vhicules de transpmt inteme est illimit
afin de simplifier le dveloppement de la simulation, le transport des conteneurs par ceux-ci
194
doit quand mme tre reprsent par un dlai . Ainsi, tel qu ' il a t vu au chapitre prcdent,
un dlai est appliqu aux conteneurs, mais aucune ressource n 'est saisie.
Le transpmt des conteneurs par les vhicules de transport inteme est ncessaire divers
processus elu tenninal. En effet, on retrouve des tran sports clans les processus de
dchargement et de chargement des navires et des trains . De plus, les camions provenant de
l' extrieur du terminal doivent aussi se dplacer l' intrieur elu terminal. Ces dplacements
sont ncessaires suite au passage du camion par la gurite, pour se rendre 1'emplacement
dsign de son conteneur, et suite au dchargement de son conteneur, pour se rendre
l'emplacement o un autre conteneur sera charg.
Afin de reprsenter ces temps de dpl acements, un e distribution alato ire triangu laire est
utilise, puisqu' aucune donne sur ces temps n' tait disponible. Les paramtres de cette
distribution sont de 0.025, 0.033 et 0.067, qui reprsentent respectivement le minimum, le
mode et le maximum de cette distribution. Ces temps sont en heures et proviennent
d'estimations des dirigeants du term inal selon lesq uels, puisque la taille du term inal est
limite, ces temps de transpmt tournent autour de deux minutes et peuvent rarement dpasser
quatre minutes, mme lorsque la circulation est importante sur le term inal. Les donnes
exprimes en heures reprsentent les temps en minutes prcdemment voq us, l'exception
du minimum qui correspond une minute et trente seconde
7.1.7 Temps de traitement des camions la gurite
Puisque aucune donne n'tait disponible po ur le traitement des camions la gurite, une
distribution alatoire triangulaire est utilise pour dterminer ce temps. Les paramtres de la
distribution choisie provierment d'estimations obtenues suite la rencontre des dirigeants du
tem1inal. D'aprs leur exprience, un camion prend gnralement deux minutes la gurite
son arrive au tenninal. Lorsque des compl ications elues des documents manquants ou
dficients se produisent ce temps peut augmenter jusqu' cinq minutes, mais ces cas sont
rares aux dires des dirigeants. Il a donc t choisi d'utiliser un mode de deux minutes et un
maximum de cinq minutes pour reprsenter le temps de traitement la gurite. Pour ce qui
est du minimum, un temps d ' une minute et trente seconde a t retenu. La conversion de ces
195
temps en heures permet d'obtenir pour le minimum, le mode et le maximum, les temps
suivants : 0,025 heure, 0,333 heure et 0,083 heure.
7.1.8 Arrive des camions
Tel qu'il a t vu au chapitre prcdent, afin de reprsenter les priodes d'activits
impmtantes se produisant des priodes prcises de la journe, des modules de dlai
retiennent une entit de contrle qui cycle clans le sous-modle d'arrive des camions pour
crer des duplicatas qui constituent les arrives proprement dites (voir figure 6.24).
Ainsi, ce sont les temps des diffrents dlais qui constituent les temps entre les arrives des
camions. Tel qu 'i l peut tre observ sur la fi gure 6.24, le sous-modle est constitu de trois
modules de dlai . Le module suprieur reprsente le dlai appliquer l'e ntit de contrle
lorsque l'heure de la journe est quivalente sept heures ou treize heures. Dans ces cas, le
dlai a initialement t reprsent par une distribution triangulaire ayant pour mode 0,020
heure. Cette moyenne provient d'une estimation selon laquelle environ un tiers des camions
se prsentent le matin l' ouverture du terminal, un autre tiers se prsentent vers treize heures
en aprs-midi, tandis que le tiers restant est rpattie entre la priode de pointe de quinze
heures en aprs-midi et le reste de la joume. De plus, puisqu ' il est assum que tout les
camions dchargent et chargent un conteneur, le nombre moyen de camions se prsentant
rellement au terminal chaque jour, peut tre estim 150 au lieu de 300. Donc, puisque le
dlai doit permettre la gnration d' un tiers de 150 camions, soit 50, le mode utilis
reprsente une heure divise en 50 intervalles de temps. Le maximum et le minimum
proviennent d'une variation de plus ou moins cinq camions durant l' heure, ce qui donne un
intervalle maximal de 0,022 heure et un minimum de 0,018 heure.
Pour ce qui est des autres priodes de la journe, il a t choisi de rpartir les 50 anives
restantes de la faon suivante : 20 pour la priode de pointe de quinze heures et 30 pour le
restant de lajoume. Ainsi, la distribution utilise pour la priode pointe de quinze heures est
triangulaire et possde les paramtres suivants : 0,050 heure pour le mode (une heure/20
arrives), 0,040 heure pour le minimum (une heure/25 anives) et 0,067 pour le maximum
(une heure/15 arrives). Les paramtres de la distribution alatoire triangulaire pour
196
reprsenter le temps entre les arrives pour le restant de la journe sont : 0,200 heure pour le
mode (six heures/30 arri ves), 0,180 heure pour le minimum (six heures/35 arrives)
et
0,240 heure pour le maximum (s ix heures/25 arrives) .
Bien que ces estimations se basent sur un nombre moyen de camions par jour, les effets
alatoires des temps inter arrives auront pour effet de faire varier ce nombre. De plus, la
rpartition estime de ces arrives provient des discussions avec les dirigeants des terminaux.
7.1.8.1 Arrives des camions avec horaire des navires
En se rapportant la section 6.4.1 5 elu chapitre prcdent, il peut tre co nstat qu e
l'implantati on effectue du process us d ' anive des cam ions s'est faite so us ce1taines
hypothses. Par contre, une alternative cette impl antation a t propose. Cette so us-section
vise prsenter les donnes ncessaires l' impl antation de cette alternative.
Plusieurs donnes sont ncessaires pour lier les anives de cami ons aux arrives de navires.
Tout d ' abord, des rel evs du nombre qu otidien de camions qui se prsentent au termin al so nt
ncessaires pour dterminer les variations du trafic au terminal. E nsuite, le nav ire sur leque l
sera charg le conteneur transport et/ou le navire duquel provient le conteneur cueilli.
Finalement, les dates d 'arrives prvues des navires au terminal sont ncessa ires pour lier ces
donnes . prutir de ces donnes, la proportion de conteneurs qui arrivent au terminal en
fonction de la date d 'arrive prvue du navire, ains i que les variations de cette propmtion,
peut tre estime et appliq ue la simul ation. Les mmes estimations peuvent tre effectues
pour les contenems cueillis au terminal par les camions.
7.1.9 Arrive des trains
Les lignes maritimes qui frq uentent le terminal de la cte Est canadi enne utilis pour
l' implantation de la simulation sont servies par un des deux transporteurs fenoviaires majeurs
canadiens. Afin de modliser les aJTives de trains au terminal, il a t choisi d'utiliser une
distribution triangulaire ayant un mode de 24 heures, Lm minimum de 22 heures et un
maximum de 26 heures. La distribution triangulaire a t choisie puisqu'aucunes donnes
--
-- - -
- - - -- - - - -
197
n' taient disponibles sur les arrives et dparts de trains. Le mod e de 24 heures provient elu
fait que le transporteur fenoviaire achemine un train par jour au pmi. Par contre, l'heure
d' arrive des wagons sur le terminal est so umi se des variat ions ce qui ne permet pas
d' utiliser un horaire fixe. Puisque selon les dirigeants du tenninal ces variations ne sont pas
trs importantes, un cart de deux heures par rapport au mode a t app liqu pour le
minimum et le maximum. Ces variations prov iem1ent du fait que ce ne sont pas les
transporteurs fenoviaires qui effectuent la livraison des wagons aux terminaux, mai s bien le
port qui possde ses propres locomotives.
7.1.10 Plan de chargement des ttains
Afin de dtenniner le nombre de conteneurs dcharger et charger sur les trains, il a
d' abord t tent d 'estimer ces nombres partir des estimations fourn ies par les dirigeants elu
terminal. En effet, ceux-ci estiment qu 'environ 60% des 5 000 pieds de wago ns, li vrs au p01i
quotidiennement, sont destins au term inal. Par contre, il s' avre difficile de convertir ces
quantits en nombre de conteneurs. Une estimation prliminaire a clone t faite, mais ce ll eci, comme l' ensemb le des esti mations fa ites jusqu ' prsent, doit tre confi rm par les rond es
de simulation de calibration et de validation.
En se basant sur l' estimation de 60% des wagons du train quotidien, il peut tre estim qu e
3 000 pieds de wagons sont destins au terminal. En postulant une longueur des wagons de
60 pieds, on obtient un nombre de 50 wagons. Selon les dirigeants du terminal, la majorit
des wagons utiliss pour le transport des conteneurs sont des wagons double hauteur de
chargement (double stack railcars). En se basant sur la configuration de chargement la plus
rpandue pour ce type wagons, soit deux conteneurs de 20 pieds l'tage infrieur et un
conteneur de 40 pieds l'tage suprieur, on obtient un nombre moyen de conteneurs par
wagons de trois, donc un nombre moyen de 150 conteneurs par tra in.
La distribution alatoire implante pour le nombre de conteneurs dcharger et charger des
trains est une distribution de Poisson ayant pour moyenne 150 conteneurs. La distribution de
Poisson a t utilise puisqu ' il s' agit d'une di stribution discrte qui , selon Kelton et col.
(2004), est gnralement utilise pour reprsenter des tailles de lots alatoires.
198
7.1.10.1 Plan de chargement de trains l'aide de donnes relles
l'instar du cas des arrives de camions, les distributions utilises pour gnrer les plans de
chargement des trains proviennent d' une hypothse pose afin de remdier au manque de
donnes relles. Dans le but de supprimer cette limite du simulateur, des donnes relles sur
les quantits de conteneurs dchargs et chargs sur les trains auraient t ncessaires. Ainsi,
les donnes auraient pu tre traites par le logiciel ARENA Input Analyzer et des distributions
plus reprsentatives de ces quantits auraient pu tre utilises.
7.2 Calibration et validation
Afin de val ider et de calibrer le modle, deux scnarios ont t simuls. Le premier utilise des
donnes sur les arrives et la distribution des conteneurs sur le navire et reproduit les
oprations du terminal pour une priode de trois mois. Le second utilise des distributions
statistiques drives des donnes du terminal pour simuler une anne complte d'oprations
du terminal. L'objectif de ces scnarios est de permettre de calibrer les paramtres du
simulateur dans un premier temps, et de dmontrer la stabilit et la validit du modle dans
un deuxime temps. En effet, le premier scnario permet de comparer les rsultats obtenus du
simulateur aux donnes relles obtenues du terminal. Le second scnario, quant lui, a pour
objectif de dmontrer la stabilit elu modle en dmontrant la consistance des donnes par
une simulation d'une anne complte d'oprations. Chacun de ces scnarios a t simul
dix reprises, les rsultats prsents proviennent de moyennes calcules partir de ces dix
rondes de simulation.
7.2.1 Test sur les donnes relles
Afin de valider et de calibrer le simulateur, les premiers tests effectus ont t excuts en
utilisant les dates d' arrive des navires et le nombre de conteneurs dcharger et charger sm
ceux-ci,
provenant des rapports de production des navires fournis par le terminal. Ces
donnes proviennent de trois mois d'oprations du terminal. Il a t choisi d'utiliser
seulement trois mois, puisque des changements impotiants au niveau des lignes maritimes
servies par le terminal ont ncessits des ajustements de la part du tenninal et des lignes
maritimes . En effet, les deux services qui frquentent Je terminal sont de nouveaux services
------~----~---------------------------------- -------------
199
qui ont t dvelopps deux et trois mois avant la priode couvrant les donnes utilises.
Ainsi, les distributions de conteneurs sur les navires et les temps de travail obtenus sur ces
rapports de production montraient des variations beaucoup plus importantes que les trois
mois utiliss. Il a donc sembl plus juste d' utiliser ces donnes qui reprsentent mieux la
situation normale du terminal.
7.2.2 Ajustements l'implantation gnrale du simulateur
Afin de tester le simulateur avec des arrives et des chargements de conteneurs sur les navires
rels, certains ajustements ont d tre effectus sur 1' implantation gnrale prsente au
chapitre prcdent. La figure 7.1 prsente le sous-modle d' arrive des navires incluant ces
ajustements.
- d
Figure 7.1 Sous-modle d'arrive des navires ajust pour tester le simulateur avec les donnes relles.
200
Les ajustements effectus servent lire les temps d'arrive des navires qui sont inscrits dans
un fichier externe la simulation . Donc, les modules de cration situs gauche de la figure
7.1 crent une entit de contrle, qui lit le premier temps d'arrive inscrit dans le fichier
l' aide du modu le de lecture qui suit le modu le de cration. Ensuite, un modu le de retenue les
retient jusqu ' ce que le temps actuel de la simulation soit gal au temps d'arrive du navire.
Lorsque l'entit de contrle est relche, un duplicata de l'entit de contrle est relch et
l'original retoume lire le prochain temps d'arrive dans le fichier externe. La nouvelle entit
cre par le module de sparation est achemine vers un module de lecture qui lit les nombres
de conteneurs dcharger et charger sur le navire. Le module d'assignation suivant attribut
un temps d'arrive au navire et le compteur et le module d'assignation qui suivent lui
attribuent un nom.
7.2.3 Ajustements aux distl'ibutions alatoires estimes
Une fois les distributions alatoires prliminaires implantes, des rondes cie simulations ont
t effectues afin de calibrer les paramtres de ces distribution s. Les paragraphes qui suivent
ont pour objectif de prsenter les ajustements effectus sur ces paramtres.
7.2.3.1 Temps de travail des serveurs
Les premiers tests effectus sur le simulateur ont rvl certaines lacunes au Illveau des
distributions alatoires des temps de travail des serveurs.
Le premier cas est celui des serveurs affects au dchargement et au chargement des navires.
En effet, mme en utilisant les paramtres les plus faibles des tableaux 7.12 et 7.13, le temps
de dchargement et de chargement des navires affichait constamment des valeurs trop
leves. Des relevs statistiques des temps de dbut et de fin des oprations des grues de quai
ont permis de constater que l'estimation des temps de travail des grues n'tait pas la cause de
ces valeurs trop levs. L'observation du compotiement du modle a rvl que les
distributions des temps de travail des serveurs sont la cause de ces valeurs trop leves. En
effet, suite la fin du dchargement du navire par les grues de quai, le traitement des
conteneurs par les serveurs ncessitait plusiems heures supplmentaires. De plus, le
20 1
processus de chargement des navires tait ponctu de plusieurs priodes de temps o les
grues de quai se trouvaient en attente de conteneurs charger. Afin de rgler ces paramtres,
une approche de type essai-erreur a t utili se. En effet, les valeurs des diffrents paramtres
des di stributions alatoires triangulaires ont t modifis, jusqu ' ce que le traitement des
conteneurs par les serveurs, suite la fin du dchargement elu navire par les grues de quai ,
soit infrieur une heure. En ce qui a trait au temps de travai l des serveurs pour le
chargement des navires, il a t modifi jusqu' ce que les temps de chargement des nav ires
soient similaires aux temps obtenus sur les rappo1ts de production du terminal. Les
paramtres obtenus suite ces tests sont de 0.075, 0.112 et de 0.142 pour le minimum, le
mode et le maximum de la distribution alatoire triangulaire du temps de travail des serveurs
lors du dchargement des navires. Pour ce qui est de ces paramtres lors des oprations de
chargement des navires, ils sont respectivement de 0.035 , 0.0475 et de 0.0595 .
Le second cas de temps de traitement des serveurs est celu i des oprations de dchargement
et chargement des trains. Dans ce cas, les tests effectus sur le simulateur ont dmontr des
temps de traitement des trains sim ilaires au temps rellement obtenus pour le dchargement
et le chargement d'un train.
Finalement, pour ce qui est du temps de travail des serveurs sur les cam10ns, les tests
prliminaires ont dmontr des temps beaucoup trop impmtants. En effet, les temps de sjour
moyens des camions 1' intrieur du terminal dpassaient un e heure, ce qui est beaucoup plus
impmtant que le temps de sjour moyen estim par les dirigeants du termina l qui valuent ce
temps entre vingt et trente minutes. l' instar des temps de travail des serveurs pour les
oprations sur les navires, une approche de type essai-erreur a t uti lise. Il en a t conclu
que les paramtres appropris pour le temps de travail des serveurs sur les camions sont de
0.027 pour le minimum, 0.0313 pour le mode et 0.042 pour le maximum de la distribution
alatoire triangulaire.
7.2.3.2 Plan de chargement des trains
L'utilisation de l' estimation fonnule la section 7.1.10 de ce chapitre s' est rapidement
rvle inadquate. En effet, en utilisant une moyenne de 150 conteneurs, l' inventaire de
202
conteneurs du terminal affichait des rsultats improbables atteignant des valeurs suprieures
10 000 conteneurs en inventaire ce1iaine priode, pour un terminal qui possde une capacit
maximale de 7 200 conteneurs. Ainsi , suite divers tests sur les moyenn es de la di stribution
de Poisson pour le nombre de conteneurs dchar ger et charger sur les train s, il a t
conclu que la valeur de la moyenne devrait tre de 11 4 pour le nombre de conteneurs
dcharger et de 110 pour le nombre de conteneurs charger. En effet, ces moyennes
permettent d ' obtenir un taux d ' utilisation de la capacit de la cour oscillant autour de 70%, ce
qui reprsente le taux estim par les dirigeants du terminal.
7.2.4 Premier scnario : utilisation des donnes relles du te rm inal
Afin de tester le simul ateur, une priode d 'o pration de trois mois a t simule. Pour ce
scnari o, les arrives de camion s et de trains ont t gnres de fao n alatoire, tandi s qu e
les arrives de nav ires, ainsi que leur plan de chargement provienn ent des rapp01is de
production fournis par le terminal de la cte Est canadi enn e. L ' inventaire initial de
contene urs a t 4250, afin d ' v iter une pnurie de conteneurs pour l' un ou l' autres des
modes de tran sport. La conditi on d ' arrt de la simulation est un temps prdterm in. Ce
temps a t fix 2304 heures, ce qui reprsente 96 j ours, afin de s' ass urer que l' ensemble
des oprations sur les 25 navires soi ent compltes lors de l' arrt de la simulation.
7.2.4.1 Zone d'oprations portuaires
Pour la pri ode simule, 25 nav ires se sont prsents au tennina l, 13 de ceux-ci opraient sur
la premire li gne, tandi s que les 12 a utres opraient sur la seconde. Le tableau 7 .14, prsente
les temps de travail rels et simu ls des grues de qua i sur chacu n de ces navires ainsi que la
productivit obtenue. La productivit des oprations est mes ure par le nombre moyen de
mouvements de conteneurs par heures de travai l des grues de quai .
203
No.
navire
Tem(>S travail
grues guai rel
108,20
Temps travail grues
guai simul
98 ,89
Productivit
relle
22,48
Productivit
simule
24,59
19,25
17,46
24,16
26,63
87,75
82,63
23,70
25, 17
74,30
64,85
2 1,90
25,09
2
..,
Ligne
36,75
31 ,51
20,95
24,44
31,30
27,81
23 ,80
26,79
102,95
103 ,75
23 ,05
22,87
28,00
31,83
28,21
24,42
89,30
119,16
24,00
17,98
72,34
72,83
25 ,3 2
25,16
31,00
26,10
22,26
26,43
103,08
100,79
24,59
25,15
25,5 0
26,98
28,3 1
26,76
86,34
88,40
25 ,9 1
25 ,28
30,10
32,89
25,58
23,4 1
94,50
92,73
23 ,93
24,38
32,34
28,38
23,44
26,7 1
91,25
91 ,79
24,35
24,2 1
21,80
22,89
27,98
26,64
96,40
109,36
23,53
20,74
33,20
33,99
24,91
24,40
92,50
80,05
21,32
24,63
24,90
25,35
23,49
23,07
80,75
80,52
24,93
25,00
27,50
29,11
25,27
23,88
Productivit moyenne :
23,99
24,57
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Tableau 7.14 Comparaison des donnes relles et des rsu ltats de la simulation pour le temps de travai l des grues
de quai et la productivit des oprations de chargement et de dchargement des navires.
- - - - - - - - - - - - - -- - - - - ----,
204
Tel que mentionn en introduction de la section 7.2, ces donnes reprsentent les moyennes
obtenues des dix rondes de simulation effectues pour ce scnario. Ainsi, la productivit
moyenne pour l'ensemble des rondes a t de 24,57 mouvements de conteneurs par heure.
Cette moyenne prsente une variance de 3,84, ce qui reprsente un cart-type de 1,96
mouvement de conteneurs par heure. La fi gure 7.2 prsente sous forme graphique les
productivits moyennes obtenues des rondes de simulation et les productivits relles
observes pour chacun des navires .
29
27
::J
Cil
s 25
c:
Cil
~ 23
::J
E
c:
~
21
Cl)
:;
+=!
0
19
::J
'C
...0
a.. 17
15
2
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Num ro du navi re
-+-- Producti'vit rel le -
Producti'vit simule
Figure 7.2 Productivit relle et simul des oprations de dchargement et de chargement des navires.
Tel qu'il peut tre observ sur le graphique, les productivits obtenues des rondes de
simulation sont prs des donnes relles, l'exception du navire numro neuf, qui prsente
une productivit simule de 17,98 conteneurs/heure, tandis que la donne relle est de 24,00
conteneurs/heure.
205
7 .2.4.2 Zone d'oprations terrestres
En ce qui concerne les rsultats pour les canuons, bien qu ' aucune donne relle n'tait
disponible, une estimation du nombre moyen de camion par j our a t fo urni e par les
dirigeants du terminal. En effet, ces derniers estimaient ce nombre 300, estimation qui a t
ramene 150 suite au postulat que tout les camions qui se prsentent au terminal dcharge
un conteneur et en charge un autre avant de quitter. Suite aux rondes de simulation, le
nombre moyen de camions obtenu est de 143,84 camions par jour. La vari ance assoc ie
cette statistique est de 9, 14, donc l'cart-type est de 3,02.
Le temps moyen des camions dans le terminal peut tre estim en add itionnant les valeurs
obtenues pour l'attente aux serveurs et les modes des distributi ons triangu laires reprsentant
les temps de travail des serveurs, Je temps de traitement de la gurite et les temps de
dplacement l ' intrieur du terminal. Pour ce qu i est du temps d 'attente moyen ava nt d'tre
dcharg ou charg par un serveur, la moyenne obtenue des dix rondes de simulation est de
0,3980 heures, ce qui reprsente 23,88 minutes. D au postulat voq u au paragraphe
prcdent, cette moyenne doit tre double puisque tous les cam ions doivent tre traits deux
fois chacun par les serveurs. De plus, le mode du temps de traitement des serveurs doit tre
ajout pour chacun des passages. Ce lui-ci a une valeur de 0,0313 heure, tandis que sa valeur
pour le temps de traitement des camions la gurite est de 0,033 heure. Finalement, le mode
de la distribution alatoire triangulaire, reprsentant les temps de dp lacement des cam ions
l' intrieur du terminal, doit tre ajout au total obten u jusqu' maintenant. Celui-ci a une
valeur de 0,033 heure et doit tre doubl, puisque les camions doivent se dplacer de la
gurite leur point de dchargement sur le terminal et de ce point leur point de chargement,
une fo is qu ' ils sont dchargs.
Le total de ces temps donne un temps de sjour moyen des camions 1' intrieur elu terminal
de 0,9906 heure, ce qui correspond 59,436 minutes. Par contre, ce temps tient compte du
fait que les camions dchargent un conteneur avant d' en charger un autre. Donc, un camion
qui ne ferait qu ' une ou 1' autre des oprations pourrait rduire de moiti sont temps de sjour
moyen l' intrieur du tenninal, ce qui cotTespond une valeur de 29,7 18 minutes . Ce temps
est beaucoup plus prs du temps de sjour moyen estim par les diri geants elu terminal qui
206
estiment ce temps environ 25 minutes. De plus, le calcul utilise le mode des temps de
travail des serveurs, des temps de dplacement l'intrieur du terminal et du temps de
traitement la gurite. Ces valuations ne reprsentent pas ncessairement Je temps moyen
de chacune des activits qu'elles reprsentent. En effet, tel qu'il a t vu pour le cas du
nombre moyen de camions se prsentant au terminal, un calcul bas uniquement sur le mode
des di str ibutions alatoires triangulaires aurait eu comme rsultat un nombre de camions par
jour quivalent 150, tandis que la moyenne prleve des dix rondes de simulation est de
143,84 camions par jours. Donc, cette estimation du temps moyen de sjour des camions
l'intrieur du terminal peut surestimer ou sous-estim er la valeur exacte de ce temps.
En ce qui a trait aux arrives de trains, un total de 958 train s s' est prsent au terminal lors
des dix rondes de simulation, ce qui reprsente une moyenne de 95,8 trains par ronde. Cette
moyenne correspond 1' horaire actuellement en vigueur au port. E n effet, selon cet horaire,
un mouvement de train (une arrive et un dpa1i) par jour est effectu. Chacune des rondes de
simulation ayant une dure de 96 jours, la moyenne obten ue correspond l' horaire tabli e par
le transp01ieur ferroviaire. Le tableau 7.15 prsente les moyennes ainsi que la variance et
l'caJi-type obtenus pour les temps de traitement des trains et le nombre de conteneurs
dcharger et charger sur le train.
Nb. conteneurs dcharger
Nb. conteneurs charger
Moyenne
Temps de
traitement
8,488834748
114,0563674
110,2 181628
Variance
0,5 89009696
103 ,3343325
109,9 5549
Ecarttype
0,767469671
10,1653496
10,4 8596634
Tableau 7.15 Temps de traitement et plan de chargement moyens des trains pour le premier scnario.
Tel qu'il peut tre observ, le nombre de conteneurs moyens dcharger et charger sur les
trains sont cohrents avec les moyennes utilises pour la gnration des plans de chargement.
En effet, ces plans taient gnrs en utilisant des distributions de Poisson ayant pour
moyenne 114 et Il 0 conteneurs. Le temps de traitement moyen obtenu pour un cycle
d'opration (dchargement et chargement) sur les trains est de 8,49 heures, ce qui reprsente
un petit peu plus qu'un qumi de travail. Peu de conclusions peuvent tre tires de ces
207
donnes. En effet, lors des entreti ens avec les diri geants du terminal, ceux-ci ont affirm qu ' il
s'avre difficile d'estimer le temps de traitement des trains, car la productivit de ces
oprations varie grandement. Selon eux, lorsque le nombre de contene urs manutentionner
est lev, les oprateurs des quipements de manutention ont tendance se dco urager et
offrir un rendement moin s lev . l'oppos, un faible nombre de manutentions effectuer
pour effet de motiver les oprateurs, qui y voient une possibilit de terminer le travail plus
tt. Bien qu ' ils aient jug difficile d'valuer la productivit des oprations sur les trains, les
dirigeants ont quand mme affirms que la manutention de 300 conteneurs en un quaJt de
travail de huit hemes reprsente une trs bonne production . Sur cette base, il peut tre affi rm
qu'avec une production moyenne d'environ 225 conteneurs . par huit heures, les rsultats
obtenus par le simulateur sont ralistes.
7.2.4.3 Zone de stockage du terminal
En ce qui concerne la zone de stockage elu terminal, les rsultats des rondes de simulation
sont prsents sous forme abrge clans le tab lea u 7 . 16. Tel qu ' il peut y tre observ,
l'inventaire moyen elu terminal est de 4488,56 conteneurs. Cette moyenn e reprsente un taux
d' occupation moyen de la capacit de stockage de 62,34% . Les dirigeants du terminal
estimaient ce taux 70%, ce qui est suprieur au taux obtenu suite aux dix rondes de
simulation effectues. Par contre, ce taux d' occupation peut tre d la dure des rondes de
simulation. En effet, puisque seulement trois mois d' oprations sont simuls, il se peut
qu ' une perturbation temporaire du systme ne puisse tre absorbe compltement par celuici. Plus prcisment, quelques anives de navires rapproches peuvent avoir pour effet de
diminuer temporairement le niveau d ' inventaire, alors que la simulation se termine. Donc, le
systme n ' a pas ncessairement le temps de se rq uilibrer avant la fin de la ronde de
simulation. Le second scnario, qui simule une anne complte d' oprations sera plus
concluent au niveau elu taux moyen d' occupation de la zone de stockage du tem1inal. Par
contre, pour le moment, il peut tre observ que la simulation est relativement cohrente avec
les estimations des dirigeants elu terminal. De plus, le temps moyen 1' intrieur du systme
des conteneurs pour les elix rondes de simulation s' est lev 140,30 heures, ce qui
reprsente une dure moyenne de sjour de 5,85 jours.
208
Moyenne
Inventaire moyen du terminal
4488,56
Variance
84287,45
Ecart-type
290,32
Tableau 7.16 Inventaire moyen des elix rondes de simulation elu premier scnario.
Finalement, le tableau 7.17 prsente le taux d'utilisation des diffrents quipements du
terminal. Bien qu ' aucunes donnes ou estims de ces taux n' aient t fournis, ces rsultats
s'avrent intressants titre comparatif d'un scnario l'autre. Il importe de mentionner que
ces taux d'utilisation concernent l'ensemble de la simulation, donc qu'ils reprsentent le taux
d' utilisation sur la priode simule, contrairement un taux d' occupation qui reprsenterait le
taux d' utilisation lorsque l'quipement est attribu une tche. Par exemple, dan s le cas des
grues de quai, il s'agit du temps travaill sur l'ensemble de la simulation et non seul ement
lorsqu' il y a des navires quai.
- - - -- -- - - -
209
quiEements
Grue 1
Taux d'utilisation
0,2403
Grue 2
0,2129
Grue 3
0,1818
Gurite
0,2100
Serveur 1
0,1908
Serveur 2
0,1904
Serveur 3
0, 1902
Serveur 4
0,1901
Serveur 5
0,1906
Serveur 6
0,1893
Serveur 7
0,1898
Serveur 8
0,1901
Serveur 9
0,1899
Serveur 10
0, 1895
Serveur 11
0, 1902
Serveur 12
0,191 1
Serveur 13
0, 1907
Serveur 14
0,1899
Serveur 15
0,1904
Tablea u 7.17 Taux d'utilisation des quipements elu terminal.
Les taux d' utilisation similaires des serveurs s'exp liquent par 1' implantation qui a t faite du
processus d'allocation des serveurs . En effet, tel qu 'expliqu la section 6.4.7 du chap itre
prcdent, les serveurs sont saisis au hasard, parmi un ensemble, par les conteneurs qui se
prsentent au sous-mod le d'opration des serveurs. Ainsi, la rgle de slection, qui est une
rgle incluse dans le logiciel, est constitue de telle sorte que tous les serveurs ont une chance
gale d'tre choisi. Donc, les taux d' utilisation devraient normalement tre trs sem blables
d'un serveur l' autre. De plus, en ce qui concerne les grues de quai, le taux d' utilisation plus
faib le de la grue 3 s' explique par l' implantation du sous-modle d' opration des grues de
210
quai (voir sous-section 6.4.6.1). En effet, tel qu ' il peut tre observ sur la figure 6.12,
lorsqu ' un navire utilise seulement deux grues de quai, les gru es 1 et 2 sont automatiquement
utilises pour les oprations sur ce navire. Donc, lorsqu ' un navire de la seconde li gne est le
seul navire quai au cours d ' une ronde de simulation, les grues 1 et 2 sont utilises, tandis
que la grue numro 3 est utilise seul ement lorsqu' il s'agit d'un navire de la premire ligne
ou lorsqu'il y a plus d' un navire quai.
7.2.5 Deuxime scnario : simulation d'une anne complte d'oprations
Afin de s'assurer de la validit et de la stabilit de la calibration effectue l' aide des rondes
prcdentes, une autre srie de elix rondes de simulation a t effectue, mai s la dure a t
prolonge une anne complte d'oprations. Les donnes utilises pour effectuer les rondes
de simulation sont les mmes que dans le cas prcdent, l'exception des arr ives de navires.
En effet, seulement trois mois de donnes taient disponibles. Donc, les arrives de nav ires
ont t gnres de faon alatoire en utilisant les distributions identifies la section 7.1.2.
Par contre, un ajustement a d tre effectu pour le temps entre les arrives de navires de la
premire ligne. Puisque la distribution utilise une loi normale ayant pour moyenne 160 heures
et pour cmt-type 60 heures, une valeur situe trois cart-type de la moyenne peut tre
ngative. Puisque le temps entre les arrives de navires ne peut tre ngatif, la simulation
applique donc automatiquement la valeur zro au temps entre l' arrive des deux navires.
Cette situation a pom effet de crer une erreur dans la simulation, qui s'arrte et affiche un
message d' erreur. Afin de remdier cette situation, le temps entre les arrives de navires de
la premire ligne est donc reprsent par une rgle de dcision qui choisit la valeur maximale
entre une heure et la valeur que procure la distribution nom1ale. Ainsi, l'erreur produite par
deux arrives simultanes de navires d'une mme ligne est vite. De plus, l' impact de deux
arrives de navires dm1s une fentre d' une heure est le mme que l'mTive de deux navires
simultanment, puisque moins de 100 conteneurs peuvent tre dchargs durant cette heure.
Comme dans le cas prcdent, dix rondes de simulation ont t effectues, mais la dure de
chacune des rondes tait de 8760 heures, ce qui reprsente 365 jours, soit une mme
211
complte. Les paragraphes suivants prsentent les rsultats obtenus de ces rondes de
simulation.
7.2.5.1 Zone d'oprations portuaires
Pour l' ensemble des rondes de simulation, un total de 1058 navires a t gnr. De ce
nombre, 539 provenaient de la premire ligne, tandis les 519 autres provenaient de la seconde
ligne. Le tableau 7.18 prsente les moyetmes ainsi que les variances et les cart-type tirs des
simulations pour les nav ires de la premire ligne, ta ndis que le tableau 7. 19 prsente ces
rsultats pour les navires de la seconde ligne.
Moyenne
34,79034197
Nb.
conteneurs
dcharger
1115,90538
Variance
67,74404517
24789,36464
20442,61538
212,788891
2,9380 10115
Ecarttype
8,230677079
157,4463865
142,9776744
] 4,58728525
1,7 14062459
Temps quai
Nb.
conteneurs
charger
] 034,58256
Temps de
travail grues
de quai
93,62828958
22,87823 3 81
Productivit
Tab lea u 7.1 8 Moyenne, variance et cart-type des statistiques des navires de la premi re ligne pour la simul ation
d'une anne complte d 'oprations.
Moyenne
19,06790724
Nb.
conteneurs
dcharger
303,8689788
Variance
51,99782342
13013,40751
6196,368454
703,4009617
7,823 575638
Ecarttype
7,210951631
114,0763232
78,71701502
26,52 170737
2,797065541
Temps quai
Nb.
conteneurs
charger
398,1252408
Temps de
travail grues de
guai
11,61125136
Productivit
22,08317886
Ta blea u 7.19 Moyenne, variance et cart-type des statistiques des navires de la deuxime ligne pour la simu lation
d' une anne compl te d'oprations.
Une premire observation qui peut tre tire de ces tableaux est que la productivit moyenne
des oprations sur les navires a diminue par rapport au scnario prcdent. De plus, cette
moyenne est infrieure aux donnes relles obtenues, qui affichent une moyenne de 23,99
conteneurs/heure. Par contre, dans les deux cas la moyenne obtenue se situe moins d'un
- - ----.-
212
cart type de la moyenne relle. En consquence, il peut tre affirm que les rsu ltats obtenus
ne discrditent pas la validit de la simu lation.
7.2.5.2 Zone d'oprations terrestres
Pour ce qui est elu nombre moyen de camions qui se prsentent au terminal quotidiennement,
les rsultats obtenus sont trs similaires aux rsultats obtenus pour la priode de trois mois.
En effet, le nombre moyen de camions s'est lev 143 ,6 8 camions/jours, tandis que la
variance et l'ca1t-type ont t respectivement de 8,27 et 2,97. La principale constatation qui
peut tre tire de ces rsultats est que la simulation des oprations sur une plus longue
priode a permis de rduire un peu la variance et l'cart-type des rsultats.
La plus grande dure de la priode de simulation a auss i permis d ' accumu ler un plus grand
nombre de donnes sur les camions, ce qu i pennet d'obtenir un temps moyen clans le systme
pour ces derniers. Cette valeur s'avre plus faib le que la valeur calcule partir des rs ultats
du premier scnario simul. En effet, pour le scnario prsent, cette valeur s'est leve
0,8158 heure comparativement la valeur de 0,9906 heure calcule pour le premier scnario.
La moyenne obtenue pour le scnario prsent reprsente un temps moyen de 48 ,95 minutes,
qui peut tre ramene 24,48 minutes en tenant compte du postulat pos quant aux arrives
de camions. De plus, cette situation confirme ce qui a t avanc la section prcdente sm
le temps l' intrieur du terminal des camions. En effet, en reproduisant le mme calcul que
celui qui a t effectu pom le scnario prcdent, la valeur du temps moyen dans le terminal
des camions aurait t de 0,9806 heure, ce qui reprsente 58,84 minutes par camion, valeur
qui peut tre ramen 29,42 minutes.
Au niveau des trains, un total de 3650 trains a t trait par le terminal au cours des dix
rondes de simulation, ce qui reprsente une moyenne de 365 trains par ronde . Comme dans le
cas prcdent, cette moyenne respecte l' horaire de train tabli par le transporteur ferroviaire.
Les rsultats concernant le temps de traitement et le plan de chargement des trains sont
prsents au tableau 7 .20. Ces rsultats sont similaires aux rsultats elu scnario prcdent qui
sont prsents au tableau 7. 15. En consquence, i 1 ne peut pas en tre tir de conclusions
diffrentes de celles prsentes prcdemment.
r213
Temps de
traitement
Nb. conteneurs dcharger
Nb. conteneurs charger
Moyenne
8,509816014
113,9106849
109,9027397
Variance
0,5 89423 563
116,5483374
115,3440594
cart-type
0,767739254
10,79575553
10,739835 16
Tableau 7.20 Temps de traitement et plan de chargement moyens des trains pour la simulation d'une anne
complte d'opration.
7.2.5.3 Zone de stockage du terminal
Tel que mentionn en 7.2.4.3, les rsultats d' une anne complte d'opration devrait tre en
mesure d ' avoir une meilleure ide du taux d' utilisation de la capacit de stockage. En effet,
une priode plus grande pennet de minimiser l' impact de var iations impo1iantes temporaires
du niveau des stocks . Avec une moyenne de 4909,44 conteneurs dans la zone de stockage du
terminal, la simu lation d'une anne complte d 'opration pennet d' obtenir un taux
d' utilisation de cette zone beaucoup plus prs de l'estimation formule par les dirigeants du
terminal. En effet, ce niveau moyen d' inventaire reprsente un taux d'utilisation de la
capacit de 68,19%, comparativement une estimation de 70%. Le tableau 7.21 prsente
cette moyenne ainsi que la variance et 1'cart-type qui y sont assoc is. Le temps moyen de
sjour des conteneurs sur l'intrieur du terminal a lgrement augment par rapport au
scnario prcdent, sa valeur actue lle est de 176,51 heures, ce qui reprsente un sjour moyen
de 7,35 jours.
Moyenne
Inventaire moyen du terminal
4909,44
Variance
2534889,931
Ecatt-type
1592,133 767
Tableau 7.21 Inventaire moyen des elix rondes de simulation d' une anne complte d'op rations du terminal.
En termes d' utilisation des ressources, une trs faible augmentation des taux d' utilisation des
quipements du terminal peut tre observe au tableau 7.22. Par contre, cette augmentation
est trop faible qu'une augmentation de la dure de la simulation mne des taux d' utilisation
des quipements plus levs.
214
guiJ!ements
Grue 1
Taux d'utilisation
0,2609
Grue 2
0,2184
Grue 3
0,1891
Gurite
0,2078
Serveur 1
0,1936
Serveur 2
0,1939
Serveur 3
0,1935
Serveur 4
0, 1934
Serveur 5
0,1934
Serveur 6
0,1935
Serveur 7
0,1936
Serveur 8
0,1932
Serveur 9
0,1931
Serveur 10
0,194
Serveur 11
0,1931
Serveur 12
0,1937
Serveur 13
0,1933
Serveur 14
0,1936
Serveur 15
0,1929
Tableau 7.22 Taux d'utilisation des quipements du terminal.
7.3 Conclusion
L ' objectif de ce chapitre tait de dmontrer la validit elu modle de simulation qui a t
dvelopp clans le cadre de ce projet de recherche. la lumire des tests effectus et des
comparaisons avec les donnes relles et les estimations obtenues des dirigeants cl 'un
tenninal portuaires de conteneurs de la cte Est canadienne, la simulation a dmonh sa
capacit reprsenter les oprations d' un terminal un niveau macro de simulation. En effet,
tel que mentionn dans le chapitre V, p01tant sur le design elu simulateur, l'objectif de cette
215
simulation est de reprsenter les oprations d ' un terminal afin d 'tre utilis comme outil
d 'analyse pour mesurer l' impact qu 'aurait l'application de systme de transport intelligent
aux terminaux de la cte Est canadienne. L ' application de la simulation au niveau macro des
oprations elu terminal permettant un aide la dcision aux ni veaux de planification
stratgique et tactique du tenninal. L'tape suivante cons iste dmontrer les app lications qui
peuvent tre fa ites d'w1 tel systme. Celle-ci constitue le suj et du chap itre su ivant qui
prsente des exemples de tests qui peuvent tre effectus sur le simulateur et les conclusions
qui peuvent dcouler de ces tests.
Par contre, avant de dmontrer ces applications, il importe de revenir sur certains points du
modle de simulation. En effet, celui-ci possde ce1taines limites qui peuvent relativi ser les
conclusions qui en sont tires. Tout d 'abord, tel qu'il a t dmontr dan s les sous-sections
7.2.4 .1 et 7.2.5 .1 , qui portent sur la zone d'oprations portuaire du terminal, les rsu ltats
obtenus du sim ul ateur sont trs fidles aux donnes obtenues du term in al. Par contre, il ne
peut pas en tre dit autant des rsultats obtenus pour la zone cl' oprations terrestres. En effet,
les hypothses poses pour reprsenter les arrives de camions et de train s proviennent
d'estimations des dirigeants du terminal qui , de leur propre aveux, ont admis avo ir de la
difficult valuer certains temps d 'opration, particulirement dans le cas des oprations sur
les trains. Bref, il peut tre conclu de ces observations que les rsultats des tests doivent tre
interprts avec plus de prcautions pour la zone d ' oprations terrestres, comparativement
aux autres zones du tenn inal.
Suite ces observations, des avenues de dve loppements potentielles du sim ul ateur peuvent
tre identifies. Une premire avenue serait d' obtenir de meilleures estimations pour les
arrives et les temps d'oprations de la zone d'oprations terrestres . Ainsi, la prcision du
modle pounait tre augmente. De plus, une autre voie de dveloppement serait de prciser
l'objet du simulateur en simulant un niveau plus prcis les oprations du terminal.
CHAPITRE VIII
EXPRIMENTATIONS
Se basant sur le calibrage et la validation de la simulation effectus au chapitre prcdent, ce
chapitre a pour objectif de dmontrer des exemples d'analyses qu i peuvent tre effectues
l'aide du simulateur dvelopp dans les chapitres prcdents. Par contre, te l qu'il sera relev
tout au long du chapitre, les rsu ltats de certains tests doivent tre inteqJI'ts avec
prcautions, d aux hypothses formules dan s les chapitres prcdents quant aux arrives de
camions au terminal et aux plans de chargement des trains. Trois analyses di ffrentes seront
prsentes. Dans un premier temps, la section 8.1 prsente le cadre de rfrence uti lis pour
analyser les diffrents tests sur le simulateur. Ensuite, la section 8.2 prsente une ana lyse
visant mesurer 1' impact de plusieurs arrives de navires au terminal l' intrieur d' une
fentre de 24 heures. Puis, un scnario simulant un bris maj eur d' une grue de quai est simul
la section 8.3. La section 8.4 mesure 1' impact, sur les oprations et la performance du
tenninal, de l'ajout d' une quatrime grue de quai. Finalement la section 8.5 conclue le
chapitre avec un rappel du chapitre et des commentaires sur les rsultats obten us.
8.1 Cadre de rfrence
Avant d'effectuer quelque analyse qu'il so it, il importe de dfinir le point de rfrence qui
sera utilis pour analyser les rsultats des tests effectus sur le simu lateur. Dans le cas
prsent, le point de rfrence utilis sera la simulation de trois mois d' opration utilisant les
donnes foumies par le temnal portuaire de conteneurs de la cte Est canadiem1e. En effet,
ces donnes offrent un point de comparaison plus stable que la sim ul ation d'une anne
complte d'opration, puisque les donnes sur les arrives de navires et le nombre de
conteneurs chargs et charger sur ceux-ci sont connu s.
217
8.2 Premier test : Arrives simultanes de navires
Ce premier test vise mesurer l'impact sur les oprations et la performance du terminal de
l'arrive de plusieurs navires l' intrieur d'une fentre de 24 heures. En effet, un tel scnario
pourrait se produire dans un cas ou une tempte, un bris ou un autre vnement quelconque
aurait pour effet de causer le retard d ' un navire sur l' horaire normal. Plus prcisment, les
changements apports au plan initial d'arrive des navires sont expliqus dans les lignes
suivantes. Avant la modification du fichier d'arrive des navires, un navire de la seconde
ligne se prsente 464 heures aprs le dbut de la simulation, tandis qu'un navire de la
premire ligne se prsente 479 heures aprs le dbut de la simu lation, soit 15 heures aprs
l'arrive du navire de la seconde li gne. Afin de gnrer une perturbation elu systme cause
par des arrives simultanes, l'anive d' un navire de la premire li gne a t ajout 464 heures
aprs le dbut de la simulation, tandis qu'une arrive de navire de la seco nd e li gne a t
ajoute 479 heures aprs le dbut de la simulation. Ainsi, un navire de chacune des lignes
arrive au terminal 464 heures aprs le dbut de la simulation et la mme s ituati on se produit
15 heures plus tard, 4 79 aprs le dbut de la simulation. Le nombre de conteneurs dcharger
des navires ajouts, ail1Si que le nombre de conteneurs y charger, sont quiva lents aux
moyennes obtenues pour leurs li gnes respectives. Aucun ajustement l' implantation de la
simulation n'a t ncessaire pour ce test, l'exception de la modification de J' horaire
d'arrive des navires. La simulation une dure de 2304 heures et dix rond es ont t
effectues, afin d'obtenir les rsultats prsents dans les paragraphes qui suivent.
8.2.1 Zone d'oprations portuaires
Pour chacune des rondes de simulation, un total de 27 navires s'est prsent au terminal. De
ce nombre, 14 proviennent de la premire ligne, tandis que les 13 restants proviennent de la
seconde ligne. Le tableau 8.1 prsente le temps quai et la productivit obtenus pour chacun
des navires. Les navires 7 et 8 n' ont pas de dom1es autres que les donnes de la sim ulation
avec retards, puisqu ' il s'agit des navires ajouts au plan initial d 'arrive des navires. Tel qu ' il
peut tre observ dans le tableau, les rsultats obtenus pour les rondes de simulation qui
incluent les arrives simultanes de navires sont trs similaires aux rsultats obtenus pour la
simulation des oprations du terminal effectue au chapitre prcdent. En effet, mis--pati les
218
navires 6, 7, 8 et 9, qui affichent des temps de travail des grues de quai plus importants et, par
le fait mme, des productivits plus faibles que les autres navires de leurs li gnes respectives,
les donnes obtenues sont trs similaires. Ces rsultats peuvent s'expliquer par la congestion
du tenninal qu'a pu causer l'anive simultane des navires. En effet, le nombre de
conteneurs plus importants traiter peut congestionner temporairement les serveurs, ce qui
peut ralentir les oprations de dchargement et de chargement des navires. De plus, les
navires 6 et 9 dmontrent aussi une lgre augmentation du temps quai ainsi qu'une
diminution de la productivit des oprations, qui peut s'expliquer par les mmes raisons que
celles voques prcde1ru11ent. Par contre, une stabilit du reste de la simu lation peut tre
observe. Cette stabilit s'explique par le fait que les arrives de navires sont relativement
espaces dans le temps, ainsi, lorsque le navire suivant se prsente, les navires arrivs
simultanment ont tous t traits.
219
No.
Ligne
Temps
navire
travail grues
quai rel
Temps
travail
grues
quai
simul
Temps Productivit P tod uctivit Productivit
telle
travail
simule
simule
avec retard
grues
quai
avec
retard
22,48
24,59
24,59
98,89
108,2
98,89
2
,.,
19,25
17,46
17,46
24,16
26,63
26,63
87,75
82,63
82,63
23 ,7
25, 17
25, 17
74,3
64,85
64,85
21,9
25 ,09
25,09
.)
4
5
36,75
31 ,51
31 ,51
20,95
24,44
24,44
31 ,3
27,81
29,57
23,8
26,79
25 , 19
42,74
16,32
123 ,18
17,44
102,95
103,75
116,16
23,05
22,87
20,55
28
31 ,83
31,84
28,21
24,42
24,81
11
89,3
119, 16
119,32
24
17,98
17,96
12
72,34
72,83
72,82
25,32
25, 16
25, 16
9
10
13
31
26,1
26,14
22,26
26,43
26,40
14
103,08
100,79
101 , 11
24,59
25, 15
25,07
15
25,5
26,98
26,92
28,31
26,76
26,83
16
86,34
88,4
88,40
25 ,91
25 ,28
25 ,28
17
30,1
32,89
32,86
25 ,58
23,4 1
23,43
18
94,5
92,73
92,56
23 ,93
24,38
24,43
19
32,34
28,38
28,53
23 ,44
26,71
26,57
20
91 ,25
91,79
91 ,93
24,35
24,21
24,17
21
21 ,8
22,89
22,83
27,98
26,64
26,72
96,4
109,3 6
109,47
23,53
20,74
20,72
22
23
33 ,2
33,99
33 ,62
24,91
24,4
24,67
24
92,5
80,05
80,07
21,32
24,63
24,63
25
24,9
25,35
25,50
23,49
23,07
22,94
26
80,75
80,52
80,45
24,93
25
25,02
27
27,5
29,11
29,13
25,27
23,88
23, 86
23,99
24,57
23,86
Productivit moyenne :
Tableau 8.1 Comparaison entre les donn es relles, les d01mes obten ues de la simulation des oprations du
terminal et les donnes obtenues de la simulation des oprations du termina l avec des retards de nav ires qui
causent des arrives simultanes.
220
8.2.2 Zone d'oprations terrestres
En ce qui conceme la zone d ' oprations, premire vue, l'arrive de navires simultanment
ne devrait pas avoir d'impact sur ces oprations.
Cette intuition se confirme pour ce qui est des arrives de cam ions, en effet, le nombre
moyen de camions parjoms aux cours des dix rondes de simulation s'est lev 143,0 1. Une
variance de 41,05 et un cmt-type de 6,41 sont associes cette moyenne. Ces rsultats sont
trs simi laires aux rsultats obtenus de la simulation de rfrence pour laquelle la moyenne
de camions par jour s'levait 143 ,84.
Tel que dmontr auparavant, il s'avre risqu d ' utiliser le ca lcul du temps moyen
l'intrieur elu terminal l'aide des modes des distributions triangulaires pour lesquels aucune
moyenne n'est disponible. Par contre, une moyenne est disponible pour la file d'attente des
serveurs du tenninal qui sont affects aux oprations sur les camions. Puisque ce temps
d' attente reprsente une part importante du temps total l' intrieur du terminal , la
comparaison de ces temps peut quand mme donner une bonne ide de l'vo luti on du temps
moyen l' intrieur du tem1inal. En effet, pour la simulation d ' une anne complte
d'opration, le temps d 'attente pow les serveurs reprsentait 96,35% (0,786/0,8158) du temps
total l' intrieur du terminal. Dans le cas prsent, le temps d 'attente pour un serveur s'lve
0,3930 heure, comparativement 0,3980 heure pour la simu lation de rfrence. Cette
variation reprsente une propottion de 1,26% ou 0,3 minute. pmtir de ces donnes, il peut
tre affirm que l' arrive simultane de plusieurs navires n ' a pas d ' impact sur le temps des
camions l' intrieur du tenninal. En effet, une variation aussi faible peut tre due la nature
alatoire de la simulation.
1'instar des arrives de camions, les arrives de train n 'ont t aucunement affectes par
1'anive simultane de plusieurs navires. En effet, un total de 960 trains s'est prsent au
terminal au cours des dix rondes de simulation, ce qui reprsente une moyenne de 96 trains
par rondes, soit un train par jour, tel que stipul par l'horaire du transporteur ferroviaire. La
221
moyenne, la variance et l'cart-type des oprations sur les trains et du plan de chargement de
ceux-ci sont prsents au tableau 8.2.
Moyenne
Temps de
traitement
9,150577658
Nb. conteneurs
dcharger
115,8529718
Nb. conteneurs
charger
111 ,7768509
Variance
6,752069391
140,2278382
148,6161233
EcaJt-type
2,598474435
11 ,84178357
12,19082127
Tableau 8.2 Temps de traitement et plan de chargement moyens des trains pour di x rondes simul ation avec
arrives simultanes de navires.
la vue des rsultats prsents au tableau 8.2, il peut tre constat que le temps de traitement
moyen des trains a augment lgrement, passant de 8,488, pour la simulation de rfrence,
9,150 pour la simulation actuelle. Par contre, cette au gmentation elu temps moyen de
traitement s'accompagne d' une hausse de la variance et de l'cart-type pour ces val eurs. En
effet, dans le premier cas, la variance est passe de 0,589 6,752, tandi s que, clans le second
cas, la valeur de l' cart-type est passe de 0,767 2,598.
8.2.3 Zone de stoclmge du terminal
Au niveau de la zone de stockage, l' arrive simultane de navires a eu pour effet d' augmenter
l' inventaire moyen du tenninal. En effet, comme il peut tre observ au tableau 8.3 ,
l' inventaire moyen dan s la zone de stockage a augment de 169,04 conteneurs pour atteindre
une moyenne quotidi enne de 4657,60 conteneurs. Cette moyenne reprsente un taux moyen
d'occupation de 64,69% par rappo1t un e estimation de 70% des dirigeants elu terminal.
Moyenne
Inventaire moyen du terminal
4657,60
Variance
106773 ,23
Ecart-type
326,76
Tableau 8.3 Inventaire moyen de la zone de stockage du terminal.
222
La figure 8.1 prsente sous forme graphique l'volution du stock moyen pour l' ensemble de
la priode de 96 jours qui est simule. Ce stock moyen reprsente la moyenne des dix rondes
de simulation effectues.
5000
1:
Q)
>.
0
E
....Q)
4000
Iii1: 3000
Q)
>
1:
2000
5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93
Jour
-ln~ntaire
moyen
a~c
arril.es simultanes
- ln~ntaire
moyen simulation de rfrence
Figure 8.1 volution de l' inventaire moyen de la zone de stockage du terminal.
Deux hausses principales peuvent tre rpertories l' observation du graphique. La premire
se produit entre les jours 20 et 25 . Cette priode correspond l' arrive des quatre navires
l' intrieur d ' une fentre de 16 heures. Cette hausse temporaire s' explique par la variation de
l'tat des navires. En effet, la hausse est compose de deux pointes du stock moyen, la
premire pointe correspond la fin des oprations de dchargement des deux premiers
navires arrivs, tandis que le creux qui suit correspond la fin des oprations de chargement
de ces navires, la combinaison des deux ncessitant un nombre important de conteneurs pour
complter leurs chargements. Suite la fin de ces opration s, le dbut du cycle d' opration
des dex autres nav ires permet de relever temporairement l' inventaire jusqu ' ce qu ' ils
dbutent leurs oprations de chargement. La deuxime hausse temporaire de l' inventaire
moyen se produit autour de la 40me journe de la simulation. Par contre, cette hausse se
223
produit aussi dans la simulation de rfrence. C'est pourquoi, on ne peut conclure une
variation induite par les changements apports aux conditions de la simulation. Le terme
simulation de rfrence renvoie ici la simulation des oprations du terminal effectue
partir des donnes relles.
quipements
Gru e 1
Taux
d'utilisation
simulation
avec retards
0,2668
Taux
d'utilisation
simulation de
rfrence
0,2403
Grue2
0,2081
0,2129
Grue3
0,2117
0, 1818
Gurite
0,2098
0,2100
Serveur 1
0,1972
0,1908
Serveur 2
0,1962
0,1904
Serveur 3
0, 1971
0,1902
Serveur 4
0, 1959
0,1901
Serveur 5
0,1960
0,1906
Serveur 6
0,1960
0,1893
Serveur 7
0,1963
0, 1898
Serveur 8
0,1954
0, 1901
Ser-veur 9
0,1956
0, 1899
Serveur 10
0, 196 1
0, 1895
Serveur 11
0,1965
0,1902
Set-veur 12
0,1962
0,1911
Serveur 13
0,1961
0,1907
Set-veur 14
0,1969
0,1899
Serveur 15
0,1966
0,1904
Tableau 8.4 Taux d' utilisation des quipements du terminal.
Le tableau 8.4 prsente les taux d ' utili sation moyens des quipements du terminal pour la
simulation de rfrence et pour les rondes de simulation incluant des retards de navires. Tel
224
qu'il peut tre observ, les taux d'utilisation des serveurs ont lgrement augment. Cette
augmentation s'explique par le nombre plus important de navires qui se sont prsents au
terminal. En effet, ces navires ont entran un plus grand nombre de contene urs traiter clans
la zone de stockage du terminal, donc, par le fait mme, une utilisation plus importante des
serveurs. Par contre, le changement le plus important qui peut tre observ se situe au niveau
de l' utilisation des grues de quai . En effet, les grues 1 et 3 ont vu leur taux d' utilisation
augmenter, tandis que le taux d'utilisation de la grue 2 a lgrement diminu. L ' augmentation
des taux d' utilisation des grues de quai peut s'expliquer par le plus gra nd nombre de navire
qui se sont prsents au tetminal au cours des rondes de simulation. De plus, l' augmentation
plus importante du taux d'utilisation de la grue 3 provient des arrives simultanes de navires
qui ncessitent de rpartir les grues sur les deux navires se prsentant en simultan.
8.3 Deuxime test: Panne majeme d'une grue de quai
L 'o bjectif de ce second test est de mesurer l'impact sur la performance elu terminal d' une
panne majeure d' une grue de quai. Par panne majeure, on entend ici une panne dune dure
d'une semaine durant laquelle le terminal doit fonctionner avec une grue en moins. Afin de
simuler ce scnario, des ajustements ont d tre appotis au mod le initial du simulateur. La
figure 8.2 prsente le sous-modle cl ' oprations des navires modifi clan s le but de simuler le
bris d' une grue de quai.
225
~ Chargement
~ ~)--~--~~~Gru~esd~equ~ai====~~
... Grue quai panne
~ Dcha rg ement~
Figure 8.2 Ajustement au sous-modle d'oprations des navires.
La modification apporte ce sous-modle consiste l' ajout d' un module de dcision qui
vrifie l'tat de la variable nomme panne grue de quai . Lorsque la valeur de cette est
gale 0, les conteneurs sont dirigs vers le sous-modle des grues de quai ; tandis que
lorsque cette variable est gale 1, les conteneurs sont dirigs vers le sous-modle identifi
de l'tiquette Grue quai panne, qui reprsente le comportement de la zone d'oprations
portuaires lors d' une panne d ' une grue de quai. Ce sous-mod le est illustr sur la figure 8.3.
226
~Air! Edt Ylew Tools ArrMQe .Object RIS\ \lfOOcw f;4l
.i ijliiT~:t, a i;:;;:; 6 i J>i;;;.
, "')"'ci
;; ; :.\ T:L~i.~ ;:~
:::;:F~ \ ~ ;;;, i~ti<!J : ;
.. " " " ;.
. :;;;;:r;:a::ii; T;;ii;;; !i.i' r; TF
~x
. / ~? j
: l~r ; Ei.e ~ ; .e:!iii !
Figure 8.3 Sous-modle d' opration des grues de quai lorsq u' une gru e est en panne.
La principale diffrence de ce sous-modle avec le sous-modle prsent la figure 6.12 est
que les conteneurs ne peuvent tre dirigs vers la grue 1, puisque cette dernire est considr
comme inutilisable. La charge de travail est donc rpartie sur les deux autres grues.
Afin de simuler une panne d ' une grue de quai, la panne doit tre gnre un moment de la
simulation. C'est pourquoi un sous-modle supplmentaire a d tre ajout l' implantation
initiale. Ce sous-modle, qui est prsent la figure 8.4, est compos de peu de modules. En
effet, le module de cration gnre une entit de contr le qui utilise ensuite le module
d ' assignation pour attribuer la valeur un la variable Panne grue de quai. Le module de
dlai qui suit retient ensuite l'entit pour la dure de la panne et la relche lorsque cette dure
est coule. Une fois relche, l'entit remet zro la valeur de la variable Panne grue de
227
quai l'aide du module d'assignation et elle est dtruite par le module de disposition des qui
suit.
!:....
Figure 8.4 Sous-modle de gnration des pannes de grues de quai.
Une fois que ces ajustements ont t effectus sur le simulateur, dix rondes de simulation ont
t effectues pour la priode de trois mois couverte par la simulation de rfrence. Chacune
des rondes avait donc une dure de 2304 heures.
8.3.1 Zone d'oprations portuaires
Pour la simulation d' une panne majeure d' une grue de quai , l' horaire original d' arrive des
navires a t utilis. Ainsi, un total de 25 navires s'est prsent au terminal au cours de
chacune des dix rondes de simulation. De ce total, 13 provenaient de la premire ligne, tandis
228
que les 12 navires restants provenaient du second service. Le tableau 8.5 de la page suivante
prsente les rsultats obtenus pour la simulation d' une panne majeure d' une grue de quai.
L'observation des rsultats permet de constater que les navires 6 et 7 affichent une
productivit moyenne plus leve que lors des rondes de simulation de rfrence. La priode
d' arrive de ces navires correspond la priode de panne de la grue de quai. En effet, le
navire 6 s'est prsent au terminal 464 heures aprs le dbut de la simulation et navire 7 la
479me heure, tandis que la panne de la grue de quai s'est produite 450 heures aprs le dbut
de la simulation et s'est termin 168 heures plus tard.
Cette augmentation de la productivit des oprations de transbordement sur les navtres
s'explique par le fait que la panne se produit sur la plus ancienne des grues, qui s' avre tre la
moins productive des grues de quai. Donc, les oprations de dchargement et de chargement
des conteneurs sur ces navires ont t effectues avec des grues plus rcentes qui pem1ettent
d' obtenir des taux de production, en mouvement de conteneurs par heure, plus levs. En
consquence, la productivit des oprations ne pem1et pas de mesurer 1' impact sur la
performance livre aux clients d'une panne prolonge d'une grue de quai. En effet, la
productivit plus lev des oprations ne pennet pas de conclure que le terminal offre un
meilleur service sa clientle, puisque les donnes de productivit concernent la productivit
moyenne par grue, clone rien n'indique que les navires ont quitt le terminal plus rapidement.
229
No. navire Ligne
Temps
Temps
travail
travail
grues quai grues
rel
quai
simul
Temps Productivit Productivit Productivit
travail
relle
simule
simule
grues
avec panne
quai
avec
anne
99,51
22,48
24,59
24,44
108,2
98,89
19,25
17,46
17,47
24, 16
26,63
26,63
87,75
82,63
82,56
23 ,7
25 , 17
25 ,20
...,
.)
74,3
64,85
64,90
21,9
25 ,09
25 ,07
36,75
31 ,51
31 ,73
20,95
24,44
24,27
31 ,3
27,81
29,53
23 ,8
26,79
28,08
102,95
103 ,75
86,88
23 ,05
22,87
27,31
7
8
28
31 ,83
31 ,86
28,21
24,42
24,80
89,3
119,16
119,18
24
17,98
17,98
10
72,34
72,83
72,76
25,32
25 ,16
25,18
11
31
26,1
26,14
22,26
26,43
26,40
103,08
100,79
100,90
24,59
25 ,15
25 ,12
25 ,5
26,98
26,94
28,31
26,76
26,80
86,34
88,4
88,32
25,91
25,2 8
25 ,31
30, 1
32,89
33 ,01
25,58
23 ,41
23,33
94,5
92,73
92,59
23 ,93
24,3 8
24,42
12
13
14
15
16
17
32,34
28,38
28 ,35
23,44
26,7 1
26,74
18
91 ,25
91 ,79
92,05
24,35
24,2 1
24,1 4
19
21,8
22,89
22,7 8
27,98
26,64
26,78
20
96,4
109,36
109,41
23,53
20,74
20,73
21
33,2
33 ,99
34,11
24,91
24,4
24,3 3
92,5
80,05
80,02
21 ,32
24,63
24,64
22
23
24,9
25 ,35
25 ,51
23,49
23 ,07
22,93
24
80,75
80,52
80,48
24,93
25
25 ,01
25
27,5
29,11
29,23
25,27
23,88
23 ,78
23 ,99
24, 57
24,78
Productivit moyenne :
Tableau 8.5 Comparaison entre les do1mes relles, les do~mes obtenues de la simulation des oprations du
termina l et les donnes obtenues de la simulation des oprati ons du termi nal avec une panne majeure d' une grue
de quai.
230
Tel que mentionn au premier chapitre, d aux cots levs d'opration des navires, les
terminaux portuaires de conteneurs doivent offrir des sjours quai de courte dure afin de
demeurer comptitif. C ' est pourquoi le temps quai des navires s' avre une mesure plus
approprie pour vrifier l' impact d'une panne sur le service offert aux clients. La figure 8.5
prsente les temps quai moyen des navires de la premire ligne pour les rondes qui incluent
une panne et les rondes de rfrence. La figure 8.6 prsente les mmes donnes pour les
navires de la seconde ligne.
60
50
40
ni
:::J
C'
ni
Ill
30
0..
E
Ql
1-
20
10
10
12
14
16
18
20
22
24
Numro du navire
-+--Temps quai simul -
Temps quai panne
Figure 8.5 Temps quai des nav ires de la ligne 1.
Tel qu ' il peut tre constat, les rsultats obtenus sont sensiblement les mmes, l'exception
des navires 6 et 7 qui taient quai pendant la panne de la grue. Dans le cas du navire 6, ce
temps a doubl, passant de 13,90 heures 26,53 heures, tandis que dan s le cas du nav ire 7, ce
temps est pass de 34,59 heures 51 ,44 heures. Ainsi, en observant les donnes on constate
que le sjour quai des navires au cours de la panne a t plus important que dan s les rondes
de simulation sans panne. Donc, on ne peut pas conclure que la grue 1 devrait tre ferme,
231
puisque, bien qu ' elle soit moins productive que les autres grues, e lle permet de diminuer le
temps quai des navires.
30
25
5- 20
10
IJ)
0..
15
E
Q)
1-
10
5
11
13
15
17
19
21
23
25
Numro du navire
-+--Temps quai simul -
Temps quai panne
Figure 8.6 Temps quai des navires de la ligne 2.
8.3.2 Zone d'oprations terrestres
Les grues de quai n'intervenant pas dans les oprations de dchargement et de chargement
des trains, une panne prolonge d ' une grue de quai ne devrait pas influence la performance
oprationnelle de ces oprations. videmment, la performance ne sera affecte, tant qu'il y
aura suffisamment de conteneurs dans la cour pour charger les trains. Cette intuition se
confirme l'observation des rsultats du temps de traitement moyen des trains. En effet,
ceux-ci dmontrent une moyenne, une variance et un cart-type similaires aux rsultats
obtenus pour les rondes de la simulation de rfrence, tel qu ' il peut tre observ au tableau
8.6.
232
Temps de
traitement
Nb. conteneurs
dcharger
Nb. conteneurs
charger
Moyenne
8,482898639
113 ,5739583
109,5489583
Variance
0,604085349
120,4867038
110,9590187
carttype
0,777229277
10,97664356
10,53370869
Tableau 8.6 Temps de traitement et plan de chargement moyens des trains pour elix rondes simulation avec panne
d'une grue de quai.
8.3.3 Zone de stockage du terminal
Pour la simulation d' une paJme majeure d'tme grue de quai , l' inventaire moyen de la zone de
stockage du terminal a t de 4496 conteneurs, ce qui reprsente un taux d' occupation moyen
de 62,44%. Ce taux est comparable celui obtenu pour la sim ulati on de rfrence qui
s'levait 62,34%. L'inventaire moyen, ainsi que la variance et l'ca rt-type de cette moyenne
se retrouvent au tableau 8.7.
inventaire moyen du terminal
Moyenne
Variance
cart-type
4496.006944
88205.58744
296.9942549
Tableau 8.7 Inventaire moye n de la zone de stockage du terminal.
L'volution du stock moyen de la zone de stockage du terminal peut, quant elle, tre
observe la figure 8.7, ci-dessous. Lorsque compare la simulation de rfrence, la
simulation d'une pmme majeure d'une grue de quai entrane une diffrence importante clans
l'volution du stock moyen aux alentours de la 20me journe. Cette augmentation concide
avec le dbut de la panne qui s'est produit durant la 18me journe de la simulation. Cette
augmentation peut s'exp li quer par une diminution du rythme de chargement des conteneurs
sur les navires due la panne. Ainsi, le 1ythme d'arrive des trains et des camions est le
mme, tandis que le rythme de chargement des navires diminue, ce qui cause une
augmentation du stock de conteneurs qui se rsorbe par la suite.
233
7000
c::
6000
~ 5000
0
E 4000
...
Q)
...c::
Ill
3000
Q)
> 2000
..:
1000
0
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96
Jour
!--Inventaire moyen panne - - Inventaire moyen simulation rfrence
Figure 8.7 volution de l' inventaire moyen de la zone de stockage du termin al.
234
Grue 1
Taux
d'utilisation
simulation
avec panne
0,2214
Taux
d'utilisation
simulation de
rfrence
0,2403
Grue2
0,2220
0,2129
Gtue 3
0,1890
0,1818
Gurite
0,2095
0,2 100
Set-veur 1
0,1903
0, 1908
Serveur 2
0,1899
0,1904
Serveur 3
0,1891
0, 1902
Set-veur 4
0,1900
0,1901
Serveur 5
0,1889
0, 1906
Set-veur 6
0,1 886
0,1893
Serveur 7
0,1894
0,1898
Serveur 8
0,1895
0,1901
Serveur 9
0,1900
0,1899
Serveur 10
0,1889
0,1895
Serveur 11
0,1896
0, 1902
Serveur 12
0,1900
0, 1911
Serveur 13
0,1891
0, 1907
Serveur 14
0,1904
0, 1899
Set-veur 15
0,1890
0,1904
quipements
Tableau 8.8 Taux d' utilisation des quipements du terminal.
Le tableau 8.8 prsente les taux d'utilisation des quipements du terminal pour la simulation
de rfrence et pour le scnario simulant une panne prolonge d' une grue de quai. Le
principal constat ressmiant de l'observation de ces rsultats est que la panne qui a affecte la
grue numro un s'est rpercute sur les deux autres grues de quai, qui ont vu leurs taux
d'utilisation augmenter lgrement. De plus, le taux d'utilisation des serveurs a diminu
lgrement. Cette situation s'explique par le fait que le taux d'utilisation des serveurs est
dpendant du taux d' utilisation des grues de quai. En effet, tel qu'il a t vu au chapitre V,
235
qui portait sur le design du simulateur, le nombre de serveurs allou un navire est dtermin
en fonction du nombre de grue de quai qui lui ont t alloues.
8.4 Troisime test: Ajout d'une grue de quai
Les scnarios prcdents dmontraient la capacit actuelle du termina l rpondre des
vnements alatoires venant modifier les conditions normales du terminal. Par contre, ce
troisime test vise simuler une modification volontaire de ces conditions. Plus prcisment,
l'objectif de ce scnario est de mesurer l' impact de l' ajout d' une quatrime grue de quai sur
les oprations de dchargement et de chargement des navires. Par contre, la simulation de cet
ajout a ncessit des modifications l' implantation gnrale de la simulation.
~ Arena {Modele_final_test_4uues Run Mode)
~~
"'l
8.
---! i ~? :
Figure 8.8 Sous-modle d'opration des grues de quai.
236
Tout d 'abord, la grue supplmentaire a d tre ajoute au sous-modle d'opration des grues
de quai, tel qu ' illustr sur la figure 8.8. De plus, le fichier d ' numration des tats possibles
du terminal a d tre modifi. En effet, ce fichier, qui est utilis pour l' allocation des
serveurs, a d tre modifi pour tenir compte des nouvelles possibilits d'allocation des
serveurs en fonction du nombre de grues de quai alloues aux navires. Ainsi , le fichier est
pass de 384 lignes de possibilits d' allocation 624.
8.4.1 Zone d'oprations portuaires
Au cours de la simulation des oprations elu terminal suite l'ajout d ' une grue
supplmentaire, un total de 25 navires s'est prsent au tenninal. La rpattition des navires a
t la suivante : 13 navires de la premire ligne et 12 navires de la seconde li gne. Les
rsultats des oprations de dchargement et de chargement de ces navires sont prsents au
tableau 8.9. l'observation du tableau, il peut tre constat que l' ajout d ' une grue
supplmentaire a fait augmenter la productivit moyenne des oprations. En effet, le nombre
moyen de conteneurs manutentionns pour une grue par heure est pass de 24,57 24,83.
Cette augmentation peut tre attribuable au fait que la nouvelle grue a une capacit de
production plus leve que les grues plus anciennes. E n effet, la distribution alato ire utili se
pour dterminer le temps de traitement des conteneurs par cette nouvelle grue est la mme
que celle utilise pour la grue numro 2. Cette distribution a t choisie puisque cette grue est
la dernire qui a t acquise par le terminal (elle est en opration depuis 2 ans). Puisque cette
grue est rcente, il a t postul qu'une nouvelle grue aurait une capacit similaire cette
grue.
En ce qui concerne le nombre d'heures travailles par les grues de quai, les rsultats
dmontrent des variations similaires. En effet, les heures travailles ont diminues lgrement
suite l'ajout d'une grue de quai supplmentaire. La cause de cette diminution est la mme
que dans le cas de la productivit des grues de quai, soit le fait que la nouvelle grue a une
capacit d ' opration suprieure aux grues plus anciennes.
237
No. Ligne Temps
navire
travail
grues
quai
rel
Temps Temps travail Productivit Productivit Productivit
telle
travail grues quai avec
simule
simule avec
grue
grues
grue
supplmentaire
quai supplmentaire
simul
108,2
98,89
98,89
22,48
24,59
24,59
19,25
17,46
17,32
24,16
26,63
26,85
87,75
82,63
82,51
23 ,70
25 ,17
25 ,21
3
4
74,30
64,85
64,80
21 ,90
25 ,09
25 , 11
36,75
31 ,51
31 ,25
20,95
24,44
24,64
31 ,30
27,81
27,56
23,80
26,79
27,03
102,95
103,75
103 ,76
23 ,05
22,87
22,87
28,00
31,83
30,04
28,21
24,42
18,42
89,30
119, 16
116,32
24,00
17,98
26,03
10
72,34
72,83
72,97
25,32
25 ,16
25 ,11
11
31 ,00
26,10
25,63
22,26
26,43
26,92
103 ,08 100,79
100,91
24,59
25,15
25 ,12
12
13
25,50
26,98
26,74
28,31
26,76
27,00
14
86,34
88,4
88,32
25 ,91
25 ,28
25 ,31
15
30, 10
32,89
32,69
25 ,58
23 ,41
23,55
94,50
92,73
92,62
23 ,93
24,38
24,41
32,34
28,38
28,05
23 ,44
26,71
27,02
91 ,25
91,79
92,02
24,35
24,21
24,15
16
17
18
19
21 ,80
22,89
22,52
27,98
26,64
27,09
20
96,40
109,36
117,00
23 ,53
20,74
19,38
21
33 ,20
33,99
29,68
24,91
24,40
27,87
92,50
80,05
80,00
21 ,32
24,63
24,65
22
23
24,90
25,35
25,33
23 ,49
23 ,07
23 , 10
24
80,75
80,52
80,42
24,93
25 ,00
25 ,03
25
27,50
29, 11
28,90
25 ,27
23 ,88
24,05
23,99
24,57
24,83
Productivit moyenne :
Ta bleau 8.9 Comparaison entre les donnes relles, les donnes obtenues de la simulation des oprations du
terminal et les donnes obtenues de la simulation des oprations du tem1inal avec 1' ajout d 'un e gru e de quai
supplmenta ire.
238
l'instar du test prcdent, qui simulait une panne majeure d ' une grue de quai , l' impact le
plus important de 1' ajout d ' une grue de quai supplmentaire devrait se faire ressentir sur le
temps quai des navires . En effet, l' ajout de cette grue supplmentaire permet d'assurer un
minimum de deux grues de qui par navires lorsque deux navires sont prsents au terminal au
mme moment. Les rsultats des temps quai des navires sont prsents sous forme
graphique aux figures 8.9 et 8.10.
60
50
40
'iii
:::J
C'
c.
30
E
Q)
1-
20
10
10
12
14
16
18
20
22
24
Numro navire
--+---Temps quai simul -
Temps quai 4me grues
Figure 8.9 Temps quai des navires de la ligne l.
La principale diffrence avec les rsultats de la simulation de rfrence est que les temps
quai lorsque deux navires sont au terminal simultanment diminuent. En effet, les navires 8 et
9, qui arrivent respectivement 704 et 720 heures aprs le dbut de la simulation, a insi que les
navires 20 et 2 1, qui arrivent 1680 et 1704 heures aprs le dbut de la simulation, prsentent
des temps quai plus faible. Dans le premier cas, le navire 8 a diminu son sjour de 4,81
heures, passant de 31,83 heures 27,02 heures, tandis que le navire 9 a diminu son sjour de
239
11 ,62 heures, passant de 50,3 9 heures 3 8,77 heures. Dans le second cas, le navire 20 a vu
son sjour tre court 39,00 heures, par rapport une priode de 42,68 heures pour la
simulation de rfrence et le navire 21 a diminu sont temps quai de 6,15 heures, celui-ci
tant pass de 28,99 heures 22,84 heures. Le temps quai des autres navires a vari peu,
puisque le nombre de grue de quai avoir travai ll sur ceux-ci est demeur stab le. En effet,
malgr l'ajout de la grue supplmentaire, le nombre maximal de grues pouvant travai ller sur
les navires de la premire ligne est toujours de trois, tandis que ce nombre est de deux pour
les navires de la seconde ligne.
45
40
35
30
'ni
:::J
0"
-ns
25
VI
c.. 20
E
Cil
1-
15
10
5
0
2
11
13
15
17
19
21
23
25
Nu m ro navi re
--+- Temps quai simul -
Temps quai 4me grues
F igu re 8.10 Temps quai des navires de la ligne 2.
8.4.2 Zone d'oprations terrestres
L ' ajout d'une grue de quai supplmentaire n'a aucun impact sur les arrives de camions au
terminal. En effet, la moyenne des rondes de simulation en ce qui concerne le nombre moyen
de camions se prsentant au terminal chaque jour est de 143,58. Cette moyenne affiche une
variance de 39,07 et un cart-type de 6,25 . Ces donnes pour la simulation de rfrence
240
taient respectivement de 143 ,84 pour la moyenne, 9,14 pour la vari ance et 3,02 pour l'catttype.
Le temps d ' attente moyen des camions pour un serveur a par contre au gment. En effet, ce
temps est pass de 0,3980 heures, ce qui reprsente 23,88 minutes, 0,4003 heures, ce qui
reprsente 24,018 heures. Bien que cette variation ne so it pas trs importante, elle peut tre
explique par le nombre plus importants de serveurs qui sont affects aux oprations sur les
navires . En effet, si les quatre grues de quai travaillent s imultanment, un nombre plus
important de serveurs sera ncessaire pour traiter les conteneurs provenant ou destinati on
des grues de quai.
Pour ce qui est des trains, le tableau 8.10 prsente les rs ultats moyens obtenus des dix
rondes de simulation des oprations du terminal avec l'aj out d ' une grue de quai
supplmentaire. L ' observation du tableau permet de constater qu e l' ajout d' une gru e de quai
supplmentaire n 'a pas d ' impact sur les oprations de dchargement et de chargement des
train s. En effet, les rs ultats obtenus pour ces rondes de simulation sont prat iquement les
mmes que les rsultats obtenus pour la simul ati on de rfren ce qui sont prsents au tabl eau
7.15 du chapitre prcdent.
Temps de
traitement
Nb. conteneurs
dcharger
Nb. conteneurs
charger
Moyenne
8,470384994
113,7922756
] 09,6899791
Variance
0,594377647
110,8773906
106,53 17908
Ecarttype
0,770958914
10,5298333 6
10,32 1423 87
Tableau 8.10 Temps de traitement et pl an de charge ment moyens des trai ns pour dix rondes simul ation avec une
grue de quai supplmentaire.
L' implantation de la politique d 'allocation des serveurs prsente la section 6.4.5 explique
le fait que le temps d ' attente des cam ions pour un serveur ait vari mais que le temps de
traitement des trains n ' ait pas vari. E n effet, selon cette politique, l' all ocation des serveurs
aux trains est prioritaire 1'allocation des serveurs aux camions. Dans 1'ventualit o le
nombre de serveurs ncessaire est plus impmtant que le nombre de serveurs disponible, les
241
camions sont traits en derniers, lorsque les oprations sur autres modes de transport sont
compltes.
8.4.3 Zone de stockage du terminal
La zone de stockage du terminal a dmontr un taux d' occupation moyen de 62,70% pour les
dix rondes de simulation de ce scnario. Cette moyenne est infrieure au taux d' utilisation
estim par les dirigeants du terminal (70% ), mais elle est similaire au rsultat obtenu pour la
simulation de rfrence, qui affichait un taux d' utilisation de la zone de stockage du terminal
de 62,34%. En consquence, les donnes prsentes au tableau 8. l 0 sont similaires aux
rsultats prsents au tableau 7.16 du chapitre prcdent. Ces tableaux prsentent 1' inventaire
moyen du terminal ainsi que la variance et l'cart-type associs celui-ci.
Inventaire moyen du terminal
Moyenne
Variance
cart-type
4514,310417
84078,44577
289,9628352
Tableau 8.11 Inventaire moyen de la zone de stockage elu terminal.
La figure 8.11 , ci-dessous, prsente sous forme graphique l'volution, au cours de la
simulation, de l'inventaire moyen de la zone de stockage du terminal pour la simulation de
rfrence et la simulation incluant la grue de quai supplmentaire. Tel qu'il peut tre
constat, ces donnes confirment la similarit des rsultats obtenus pour les deux tests
effectus sur le simulateur.
242
7000
6000
5000
c::
Cil
>.
4000
...
Cil
sc:: 3000
Cil
>
2000
1000
0
5
9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93
Jours
-ln\ntaire moyen a\c 4me grue - - ln\ntaire moyen simulation rfrence
Figure 8.11 volution de l'inventaire moyen de la zone de stockage du terminal.
- - - -----
243
Taux
d'utilisation
simulation
de rfrence
Grue 1
Taux
d'utilisation
simulation
avec grue
supplmentaire
0,0862
Grue2
0,1473
0,2129
Grue 3
0,2074
0,1818
Grue4
0,1672
Gurite
0,2099
0,2100
Serveur 1
0,1906
0,1908
Ser-veur 2
0, 1897
0, 1904
Serveur 3
0,1895
0, 1902
Serveur 4
0, 1899
0, 1901
Set-veur 5
0,1898
0, 1906
Serveur 6
0, 1898
0, 1893
Serveur 7
0, 1896
0,1898
Serveur 8
0,1904
0,1901
Set-veur 9
0,1900
0,1899
Serveur 10
0, 1899
0, 1895
Serveur 11
0,1895
0, 1902
Serveur 12
0,1893
0, 1911
Serveur 13
0,1887
0,1907
Serveur 14
0,1897
0,1899
Serveur 15
0,1898
0, 1904
quipements
0,2403
Tableau 8.12 Taux d'uti lisation des qu ipements du terminal.
Au niveau de l'utilisation des quipements du tenninal, le principal constat qui ressort de la
comparaison des rsultats pour la simulation de rfrence et elu test actuel est que l'ajout
d' une grue de quai supplmentaire pennet de diminuer le taux d'utilisation des autres grues.
En effet, les grues numro 1 et 2 ont diminu leur taux d'utilisation de 64,13% dans le
244
premier cas et de 30,81 % dans le second cas. Par contre, la grue numro 2 a vu son taux
d'utilisation passer de 0, 1818 0,2074 pour une augmentation de 14,08%. La nouvelle gru e,
quant elle, a affich un taux d' utilisation de 0,1 672, ce qui a permi s de rduire la charge de
travail des grues numro 1 et 2. Pour ce qui est des serveurs, ceux-ci ont dmontr des taux
d' utilisation similaires aux taux obtenus pour la simulation de rfrence.
8.5 Conclusion
Ce chapitre avait pour obj ectif de dmontrer des exempl es d' analyses qui peuvent tre
effectues l'aide du simulateur dvelopp dans les chapitres prcdents. Pour ce faire, trois
tests ont t effectus sur le simulateur. Un premier test simulait l' arri ve simultane de
plusieurs navires au tenninal, un autre simulait une panne maj eure d' une grue de qu ai, tandi s
que le dernier simulait l'ajout d'une grue de quai supplmenta ire au termin al.
Tel qu ' il a t vu au cours du chapitre, le simulate ur perm et de mes urer l' impact de ces
variations des conditions d'opration du term inal sur la perfonnance de celu i-ci. Ainsi, il peut
tre co nclu qu e la simulation peut tre applique aux termin aux de la cte Est canadi enne.
Par contre, afin de pleinement raliser l'o bj ectif de dve lopper un outil d' analyse pour
mesurer l' impact qu 'aurait l' introduction de systmes de transport inte lligent dans les
terminaux de la cte Est canadienne, des amliorations doivent tre apportes au simulateur.
En effet, tel qu ' il a t vu dans ce chapitre et dan s les chapitres prcdents, le simu lateur est
limit par ce1taines hypothses qui ont d tre poses afin de surmonter un manque de
donnes relles. Les prin cipales amliorations apporter au simul ateur se situent au niveau
de la simulation des oprations de la zone d'oprations terrestre du terminal.
C'est pourquoi les rsultats des tests prsents dans ce chapitre doivent tre interprts avec
prcaution. En effet, les rsultats concernant la productivit des oprations de dchargement
et de chargement des navires, ainsi que le temps quai des navires, peuvent tre interprts
avec confiance, puisque ces rsultats sont moins affects que les autres par les postulats poss
pour simuler les oprations de la zone d'oprations terrestre du terminal.
245
La conclusion qui suit ce chapitre prsentera avec un dtail plus impmtant les amliorations
qui pourraient tre effectues sur le simulateur afin de l'amliorer et de permettre de tester
avec confiance 1' impact que pourrait avoir, sur un lerminal portuaire de conteneurs de la cte
Est canadienne, l' inhoduction de systmes de hanspmt intelligents.
[Cette page a t laisse intentionnellement blanche]
CONCLUSION
Les objectifs de ce mmoire sont multiples, mais convergent vers tous vers un objectif global
commun, soit de dresser un portrait de la logistique des terminaux portuaires de conteneurs
au Canada, mais plus pmticulirement le portrait de son tat d'avancement quant
1' utilisation de systmes de transport intelligents.
Dans un premier temps, les terminaux portuaires de conteneurs ainsi que leur rle au sein des
rseaux de transpott maritime ont t situs dans la perspective plus large du transpott
intermodale. Au cours de ce processus, les oprations de ces terminaux aussi bien que les
divers intervenants et pmties prenantes concems par ces oprations ont t prsents.
Ensuite, la revue de la littrature, concernant les problmes de planification et de gestion des
terminaux pottuaires de conteneurs, a permis de relever la quantit importante de
problmatique avec lesquelles les administrateurs de terminaux doivent composer. De plus,
divers outils pour traiter ces problmes ont t prsents dans le cadre de cette revue.
Dans le but d'approfondir la comprhension du fonctionnement de ces terminaux, une tude
des processus oprationnels et des flux d' information en amont et en aval de ceux-ci a t
ralise partir d'observations et de discussions avec les dirigeants des principaux potts qui
manutentionnent des conteneurs sur la cte Est du Canada. Ces observations et discussions
ont servis de base la suite des travaux effectus, qui procdent une analyse comparative de
l'utilisation des systmes de transpmt intelligent entre ces potts et les pmts du reste du
monde.
La constatation de la complexit inhrente la gestion des terminaux portuaires de
contenems a t Je moteur de cette analyse. En effet, ce mmoire se voulait constructif dans
son approche en allant au-del de l'identification des problmatiques et en proposant des
pistes de so lution celles-ci. C ' est dans cette approche que les systmes de transpott
intelligents ont t identifis comme une piste de solution pour Je traitement des
problmatiques de planification et de gestion des temnaux pmtuaires de conteneurs.
248
De l'analyse comparative, il a pu tre conclu que les ports de la cte Est canadienne,
l'image des ports du reste de l' Amrique du Nord, ont un faible niveau d'intgration des
systmes de transport intelligents dans le cadre de leurs oprations de manutention de
conteneurs. Par contre, une combinaison de facteurs gographique et conjoncturels (une
saturation des potis de la cte Ouest) place les p01is de la cte Est canadienne dans une
situation favorable pour saisir des opportunits importantes de dveloppement de march.
Afin de saisir ces opportunits de march, les pOlis de la cte Est canadienne doivent tre en
mesure d'offrir des temps de cycle portuaires (dchargement et chargement elu navire) rapide.
C'est ce niveau, et en facilitant
la coordination des activits de
la chane
d' approvisionnement, que les systmes de transport intelligent peuvent jouer un rle
primordial.
Par contre, afin d'valuer la petiinence et de choisir parmi les nombreuses possibilits
d' implantation de systme de transpoti intelligents, les terminaux portuaires de conteneurs
ont besoin d'un outil d' analyse. La deuxime patiie elu mmoire s'est penche sur le
dveloppement d' un tel outil, par le dveloppement d'une premire version d' une simulation
des oprations d' un terminal maritime de conteneurs.
Tout d'abord, un design du simulateur a t dvelopp partir des diagrammes des diffrents
processus d'un terminal portuaire de conteneurs. Ces di agrammes constituaient une
reprsentation logique des oprations de ces terminaux. partir de ces diagrammes, le
simulateur a t dvelopp l'aide de la version 8.1 elu logiciel de si mulation ARENA.
patiir de cette implantation de la simulation, des tests ont t effectus afin de calibrer et de
valider la simulation. Cette phase de validation a permis de relever certaines limites du
simulateur qui proviennent d' hypothses qui ont t poses afin de surmonter un manque de
donnes relles sur les oprations du terminal.
Finalement, des tests ont t effectus sur le simulateur afin de dmontrer le type d' analyses
qui peuvent tre effectues patiir d'un outil de la s01ie. Par contre, l'analyse des rsultats de
249
ces tests s' est faite en tenant compte des limites du simulateur identifies lors de la phase de
calibration et de validation.
Tel que mentionn auparavant, certaines limites ont t rencontrs au cours elu
dveloppement elu simulateur. En effet, le manque de donnes relles sur les oprations de la
zone d'opration terrestre du terminal limite la potte des analyses qui peuvent tre
effectues sur ces oprations. Par contre, des faons de surmonter ces limites ont t
prsentes au moment o celles-ci ont t identifies.
L'implantation de ces solutions constitue une piste de dveloppement futur d' une simulation
des oprations d'lm terminal pmtuaire de la cte Est canadienne. Par contre, ces so lutions
ncessitent d'obtenir des donnes rell es supplmentaires. De plus, l' utili sation d'un
chantillon de donnes couvrant une plus grande priode d' opration permettrait de raffiner
la simulation. Dans sa version actuelle, le simulateur dvelopp utilise des donnes provenant
d ' une priode d' opration de trois mois. Des donnes pour une priode d ' un an ou plus
permettraient de faire apparatre les effets de saisonnalit qui peuvent se produire. E n effet,
les donnes utilises couvrent les mois de juin, juillet et aoOt. Ces trois mois sont des mois o
la mto ne constitue pas un facteur influenant le contexte opratimmel des terminaux. Par
contre, il est lgitime de se demander si l' hiver peut constituer un facteur d' influence sur la
productivit des oprations et sur l' horaire des navires.
Une autre avenue de recherche concernant la simulation consisterait prciser la perspective
du simulateur. En effet, dans sa version actuelle le simulateur simu le les oprations d'un
ternnal un niveau macro. Une simulation un niveau plus prcis ncessiterait de simuler
les vhicules de transport interne, ainsi que la capacit et la localisation des diffrentes piles
de conteneurs de la zone de stockage du terminal, afin de mesurer la congestion entrane par
les diffrentes stratgies oprationnelles utilises.
En ce qui a trait l' utilisation des systmes de transport intelligents par les terminaux
portuaires de conteneurs, l' analyse effectue dans ce mmoire constituaient une premire
analyse afin de situer gnralement les terminaux canadiens par rapport aux terminaux du
250
reste du monde. Une avenue de recherche, dans ce cas, consisterait largir l' tendue de cette
recherche, en visitant un nombre plus importants de terminaux et en effectuant un
recensement plus complet des diffrents systmes de transport intelligents existants et en
phase de dveloppement, qui sont ou qui pounaient tre appliqus aux terminaux portuaires
de conteneurs. De plus, une tude des diffrents facteurs favorisant l' adoption de ces
technologies par les terminaux permettrait d'offrir aux temnaux portuaires de conteneurs du
Canada des conditions idales pour une implantation plus grande chelle des systmes de
transport intelligents et la saisie des opportunits offertes par ceux-ci.
BIBLIOGRAPHIE
Alessandri A, Sacone S, Siri S (2004) Receding-horizon optimal control for container
.
nenna1 Symposmm
on
transfer in intermodal terminais.
Proceedings of the 5th T.
Transportation Analysis, Guadeloupe, 2004 .
Arjen Van Klink H, Van Den Berg GC (1998) Gateways and Intermodalism. Journal of
Transport Geography, vol. 6, no.l, p. 1 - 9.
Bebenek (2006) EDIPORT Vehicles Access Management System: Managing Truck Queues
and Service Times at the Port of Halifax, Confrence et Ru ni on Gnrale Amme lles de la
Socit des Systmes de Transport Intelligents du Canada, Whistler, Canada, 4-6 juin 2006.
Benamar MF (1995) Transport terrestre multimodal de conteneurs maritimes: modle de
tournes simultanes des conteneurs et des vhicules. Thse de doctorat, Paris, co le
Centrale de Paris, 134 pages.
Bickel D (2006) Using ITS in Canada 's Flagship Port. Confrence et Runion Gnrale
Annuelles de la Socit des Systmes de Transport Intelligents du Canada, Whistler, Canada,
4-6 juin 2006.
Bish E, Leong T-Y, Li C-L, Ng J, Simchi-Levi D (2001) Ana~vs is of a New Vehicle
Scheduling and Location Problem. Naval Research Logistics, vo l. 48, p. 363-385.
Bose J, Reiners T, Steenekn D, Voss S (2000) Vehic/e Dispatching at Seaport Container
Terminal Using Evolutionary Algorithms. Proceedings of the 33'd Hawaii International
Conference on System Sciences, Hawaii, 2000.
Bozzo R, Derito A, Nurchi R, Ack.royd N (2001) MOCONT: a new .system for container
terminal monitoring and control. Proceedings of the Intelligent Transportation System
Conference, Oakland, USA, August 2001.
Chen T, (1999) Yard operations in the container terminal - a stuc~v in the unproductive
maves. Maritime Policy Management, vo l. 26, no.l , p. 27-38.
Crainic TG (2000) Network Design in Freight Transportation. European Journal of
Operational Research, vol. 122, no. 2, p. 272- 288 .
Crainic TG (2006) Planning Models for Transportation in the Electronic Age. Congrs
conjoint de la Socit Canadietme de Recherche Oprationnelle (SCRO) et des Joumes de
l'Optimisation, Montral, Canada, 8-10 mai 2006.
252
Crainic TG, Gendreau M (2004) Intelligent Freight Transportation Systems: Assessment and
the Contribution of Operationnal Research. Publication: Centre de recherche sur les
transpo1i, venir: Transpottation Research patt C: Emerging Technologies
Crainic TG, Kim KH (2005) Intermodal transportation. In Transportation, Handbook.s in
Operations Research and Management Science. Sous la direction de Barnhart C et Laporte
G, North-Rolland, Amsterdam, paratre.
Daganzo CF ( 1989) Crane Productivity and Ship Delay in Ports. Transportation Research
Board 1251, p. 1-9.
Duinkerken M , Evers J, Ottj es J (2001) A simulation mode! for integrating quay transport
and stacking policies on automated container terminal. Proceedings of the 15tl' European
Simu lation Multiconference.
Duinkerken M , Evers J, Ottjes J (2002) Improving quay transport on automated container
terminais. Technical report, Proceedings of the IASTED International Co nference of
Appliecl Simulation an d Modelling.
Drr E, Giannopoulos GA (2003) SITS: a system for uniform intermodal freight tramport
information exchange. International Joumal ofTranspoti Management, vo l. 1, p. 175 -186.
Evers J, Koppers S (1996) Automated guided vehicle traffic control at a container terminal.
Transpottation Research A, vol. 30, no.1, p. 21-34.
Fratar TJ, Goodman AS , Brant Jr. AE (1960) Prediction of Maximum Practical Berth
OcctqJancy. Journal of the Waterways and Harbors Division, vo l. 86, p. 69- 78 .
Gambardella LM, Rizzoli AE, Zaffalon M (1998) Simulation and planning of an intermodal
container terminal. Simulation, vol. 71 , no. 2, p. 107 - 116.
Garstone S (1995) Electronic data interchange (EDI) in port operations.
Information Management, vol. 8, no. 2, p . 30 - 33.
Logistics
Giannopoulos GA (2004) The application of information and communication technologies in
transport. European Joumal of Operational Research , vol. 152, p.302- 320.
Gnther HO, Kim KH (2005) Container Terminais and Automated Transport Systems.
Springer-Verlag, Berlin, 374 p.
Grunow M, Gnther HO, Lehmann M (2004) Disp atching multi-load AGVs in high!y
automated seaport container terminal. OR Spectrum, vol. 26, p. 211 - 235
Guan Y, Cheung RK (2005) The berth allocation problem: models and solution method. In
Container Terminais and Automated Transport Systems. Sous la direction de Gnther HO et
K im KH, p. 141- 158, Springer-Verlag, Berlin .
253
Haefner LE, Bieschke M (1998) ITS Opportunity in Port Operations. Proceedings of the
1998 Transpmtation Conference.
Halifax P01t Authority (2006) Port of Halifax sets new TEU record. Communiqu disponib le
l'adresse : http://www.portofhalifax.ca Dernire vrification de l'adresse : 13 avril 2006.
Henesey L, Tmquist J (2004) Enemy et the gates: Introduction of Mu/ti-Agents in a
Termina! Information Community. Proceedings ofPmts and Marinas, Rhodo s, Greece.
Ioannou PA, Kosmatopoulos EB, Ju la H, Co lli nge A, Liu CI, Asef-Vasiri A, Dougherty E
(2000) Cargo Handling Technology. Teclulica l Repott , Center for Commercial Deployment
of Tranpmtation Teclmology.
Kelton, W.D., Sadowski, R.P. , and Sturrock, D ., (2004) Simulation with ARENA, 3me
dition, McGraw-Hill, 668 p.
KiaM, Shayan E, Ghotb F (2000) The importance of information technology in port
terminal operation. International Journal ofPhysical Distribution and Logistics
Management, vol. 30, no. %, p. 331 - 344.
Kia M, Shayan E, Ghotb F (2002) Investigation of port capacity under a new ctpproach by
computer simulation. Computers & Industrial Engineering, vol. 42, p. 533 - 540 .
Kim KH (1997) Evaluation of the number of rehandles in container yards. Computers and
industrial engineering 32, no. 4, p. 701 - 711 .
Kim KH, Bae JW (1998) Re-marshalling export containers in port container terminais.
Computers and Industrial Engineering, vol. 35, no . 3-4, p. 655 - 658.
Kim KH, Kang JS, Ryu R (2004) A be am sem-ch algorithm for the load sequencing of
outbouncl containers in port container terminais. OR Spectrum, vo l. 26, no. 1, p. 93- 116.
Kim KH, Kim HB ( 1998) The optimal determination of the space requirement and the
number oftransfer cranes for import containers. Computers and Industrial Engineering, vo l.
35, no. 314, p. 427-430.
Kim KH, Kim KY (1999) An Optimal Routing Algorithm for a Transfer Crane in Port
Container Terminais. Transportation Science, vol. 33, no. 1, p. 17 - 33.
Kim KY, Kim KH (2003) Heursitc Algorithms jr Routing Yarcl-Side Equipment jr
Minimizing Loading Times in Container Terminais. Naval Research Logistics, vol. 50, no. 5,
p. 498 - 514.
Kim KH, Park YM (2004) A crane scheduling method for port container terminais.
European Jomna1 ofOperational Research, vol. 156, p. 752-768.
254
Leach P (2005) PONL 's White urges better terminal productivity. The Journal of Commerce
Online. May 2 2005. Disponible sur: http://www. joc.com/cgi-bin/Printable.asp Dernire
vrification de l'adresse: 13 avril 2006 .
Lee-Pmiridge J, Teo T, Lim V (2000) Information technology management : the case of the
Port of Singapore Authority. Journal of Strategie Information System, vol. 9, p. 85-99.
Lim JK, Kim KH, Y oshimoto K., Lee JH, Takahashi T (2003) A dispatching method for
automated guided vehicles by using a bidding concept. OR Spectrum, vol. 25, issue 1, p. 25
-44 .
Linn R, Liu J-Y, Wan Y-W, Zhang C, Mlllty KG (2003) Rubber tired gantry crane
deployment for container yard operation. Computers and industrial engineering, vo l. 45 , p.
429-442.
Liu CI, Jula H, Ioannou PA (2002) Design, Shnulahon, and Evaluation of Automated
Container Terminais. IEEE Transactions on Intelligent Transportation Systems, vol. 3, no. 1,
p. 12-26.
Liu CI, Jula H, Vukadinovic K, Ioannou PA (2000) Comparing Different Technologies for
Container Movement in Marine Container Terminals. Proceedings of the 2000 Intelligent
Transportation Systems Conference.
Meersmans P, Dekker M (2001) Operations Research supports container handling. Rapport
Technique El 2001-22, Erasmus University Rotterdam, Econometrie Institute. Disponible
sur: http://www2.eur.ni/WebDOC/doc/econometrie/feweco200 111 0215l222.pdf
demire vrification de l'adresse: 13 avril 2006.
Miller AJ (1971) Queuing at Single-Berth Terminal. Journal of Waterways, Harbors and
Coastal Engineering Division, vol. 97, p. 43- 56.
Ministre des transports du Canada (2005) Government of Canada Announces Pacifie
Gateway Strategy. Communiqu disponible l' adresse:
http://www.tc.gc.ca/mediaroom/releases/nat/200 5/05 -gcO 13e.htm# bg
Dernire vrification de l'adresse: 25 juillet 2006.
Murty KG, Liu J, Wan YT, Linn R (2005) A decision support system for operations in a
container terminal. Decision Support System, vol. 39, no. 3, p. 309- 332.
Nishimura E, Imai A, Papadimitriou S (2001) Berth allocation planning in the public berth
system by genetic algorithms. European Joumal of Operational Research, vol. 131 , p. 282 292 .
255
Ottjes J, Duinkerken M, Evers J, Dekker R (1996) Robotised Inter Terminal Transport of
containers: a simulation study at the Rotterdam Port A rea. Proceedings of the 8111 European
Simulation Symposium, GetlUa, October 1996 .
Park YM, Kim KH (2003) A scheduling methodfor Berth and Quay Cranes. OR Spectrum,
vol. 25, issue 1, p. 1-23.
Port de Montra l (2006) Le port de Montral cif.fiche une excellente pe!formance en 2005.
Communiqu disponible l'adresse: http://www.port-montreal. com/news/fr 45 l.gdf
Demire vrification de l' adresse: 13 avri l 2006.
Preston P, Kozan E (2001) An approach to determine storage locations of containers at
seaport terminal. Computers and operations Research, vol. 28, p. 983 - 995.
Ramani KV ( 1996) An Interactive Simulation Madel for the Logistics Planning of Container
Operations in Seaports. Simulation, vo l. 66, no. 5, p. 291 - 300.
Sgouridis SP, Angelides DC (2002) Simulation-based analysis of handling inbound
containers in a terminal. Proceedings of the 2002 Winter Simulation Conference.
Slack B (200 1) Intermodal Transportation . ln Handbooks of Logistics and Supply-Chain
Management, sous la direction de Atm M. Brewer, Kenneth J. Button et David A. Hensher, p.
99- 126. Oxford: ditions Pergamon.
Statistique Canada (2006) www.statcan.ca Demire vrification de l'adresse 23 mai 2006.
Steenken D, Voss S, Stahlbock R (2004) Container terminal operation and operations
research: a classification and literature review. OR Spectrum, vol. 26, p. 3 - 49.
Vancouver Port Authority (2006) 2006 Mid-Year Stats Release. Communiqu disponible
1'adresse : http://www .p01tvancouver.com
Vis IFA (2005) Container Logistics. Disponible sur: http://www.i kj .nl/containerl Demire
vrification de l' adresse: 13 avril2006.
Vis I.F.A., De Koster R. , Roodbergen K.J. , Peeters L.W.P. (2001) Determination of the
number of automated guided vehicles required at a semi-automated container terminal.
Joumal ofthe Operational Research Society, vol. 52, p. 409-41 7.
Vis I, Harika I (2004) Comparison of the vehicles types at an automated container terminal.
OR Spectrum, vol. 26, p. 117- 143 .
Wan TB, Wah ECL, Meng LC (1992) The Us e of Information Technology by the Port of
Singapore Authority. World Developpement, vol. 20, no. l 2, p. 1785 - 1795.
256
Wilson ID, Roach PA (1999) Princip/es of Combinatorial Optimization Applied to
Container-Ship Stowage Planning. Journal ofHeuristics, vol. 5, p. 403 - 418.
RFRENCES WEBS
http://www.cosmosworldwide.com/ Demire vrification de l' adresse : 13 avril2006.
http://www.cpships.com Dernire vrification de l' adresse: 13 avril2006.
http://www.navis.com/ Demire vrification de l' adresse: 13 avril 2006.
www.itsa.org
www.itscanada.ca
www. portseattle.org
www.portofoakland.com
www. portoflosangeles.org
www. panyn j.com
www.mtls.com
www.tideworks.com
www.acp.gob.pa (Panama canal authority)
www. ect.nl
Das könnte Ihnen auch gefallen
- Introduction à la douane commerciale au Canada: Comprendre les procédures douanières d'importation de marchandisesVon EverandIntroduction à la douane commerciale au Canada: Comprendre les procédures douanières d'importation de marchandisesNoch keine Bewertungen
- Thse - ZOUBEIR - 2Dokument169 SeitenThse - ZOUBEIR - 2Salim82 LKNoch keine Bewertungen
- Logistique Portuaire ConteneurDokument0 SeitenLogistique Portuaire ConteneurNC Mael100% (1)
- Gestion Des Terminaux AconteneursDokument141 SeitenGestion Des Terminaux AconteneursAbdelkader Chaoui100% (1)
- La Compétitivité Portuaire ResuméDokument3 SeitenLa Compétitivité Portuaire ResuméHamza AirirNoch keine Bewertungen
- Le Passage PortuaireDokument92 SeitenLe Passage PortuaireOmar ElbotiNoch keine Bewertungen
- Methodes Et Outils de Gestion Des PortsDokument73 SeitenMethodes Et Outils de Gestion Des PortsAbdelkader ChaouiNoch keine Bewertungen
- Ports CommerceDokument45 SeitenPorts CommerceBilal GM100% (1)
- Le+Port+Tanger MedDokument20 SeitenLe+Port+Tanger MedFatima Narjis100% (1)
- Rapport Logistique PortuaireDokument25 SeitenRapport Logistique PortuaireHolaNoch keine Bewertungen
- Rap Marsa MarocDokument37 SeitenRap Marsa MarocfatimazahraaaNoch keine Bewertungen
- Rapport de StageDokument34 SeitenRapport de StageOmayma Khorbach100% (1)
- Mémoire Complét Ahcene BedouheneDokument129 SeitenMémoire Complét Ahcene BedouheneAhcene Bedouhene100% (2)
- L'impact Des Ports Sur Le Commerce MaritimeDokument5 SeitenL'impact Des Ports Sur Le Commerce Maritimekawtar ayNoch keine Bewertungen
- Port CasablancaDokument231 SeitenPort CasablancaRedouane FirdaoussiNoch keine Bewertungen
- Rapport Stage TMPADokument42 SeitenRapport Stage TMPAAymane OuadifNoch keine Bewertungen
- Chapitre II. La Perforfance PortuaireDokument29 SeitenChapitre II. La Perforfance PortuaireOmar Dhifallah100% (1)
- Ommaire: CHAPITRE 1: L'ETUDE DE PORT DE SFAX................................................................... 2Dokument44 SeitenOmmaire: CHAPITRE 1: L'ETUDE DE PORT DE SFAX................................................................... 2Eya JlassiNoch keine Bewertungen
- Marsa MarocDokument67 SeitenMarsa MarocOutmane Lakhlili100% (2)
- Les Rapports D'activités Sur Un Terminal À Conteneurs.Dokument13 SeitenLes Rapports D'activités Sur Un Terminal À Conteneurs.Dadié N'dri Edmond Junior100% (1)
- RA Marsa Maroc VFDokument23 SeitenRA Marsa Maroc VFHind El Idrissi MandourNoch keine Bewertungen
- Compétitivité de Logistique PortuaireDokument12 SeitenCompétitivité de Logistique PortuaireAb samadNoch keine Bewertungen
- Transport Et Logistique Édition Janvier 2009Dokument16 SeitenTransport Et Logistique Édition Janvier 2009Missy321Noch keine Bewertungen
- Somaport TC PDFDokument9 SeitenSomaport TC PDFKaoutar LrhiatiNoch keine Bewertungen
- Automatisation de La Gestion Du Terminal A Conteneurs (TCS)Dokument38 SeitenAutomatisation de La Gestion Du Terminal A Conteneurs (TCS)Kovax Kovaxinov100% (2)
- Facteurs Explicatifs Des Délais de Passage Au Ports AfricainsDokument40 SeitenFacteurs Explicatifs Des Délais de Passage Au Ports AfricainsAdrien Rain75% (4)
- Ports MaritimesDokument114 SeitenPorts MaritimesHanaMradNoch keine Bewertungen
- Le Role Des Ports Secs Dans Le Commerce Maritime PDFDokument102 SeitenLe Role Des Ports Secs Dans Le Commerce Maritime PDFCharles Didier Nkoulou100% (2)
- Rapport de Stage 1 2 PDF FreeDokument47 SeitenRapport de Stage 1 2 PDF Freeyassin eccNoch keine Bewertungen
- Positionnement de Marsa Maroc Au Port Tanger MedDokument5 SeitenPositionnement de Marsa Maroc Au Port Tanger MedOmar AmraniNoch keine Bewertungen
- G.Portuaire 1Dokument3 SeitenG.Portuaire 1El Hanafi MohamedNoch keine Bewertungen
- Rapport de Stage de Fin D Etud ONCFDokument92 SeitenRapport de Stage de Fin D Etud ONCFYoussef FlNoch keine Bewertungen
- LogistiqueDokument19 SeitenLogistiqueYassine BicharaNoch keine Bewertungen
- Rapport Loubna TOUNZIDokument66 SeitenRapport Loubna TOUNZISara Lailani50% (2)
- Marsa Maroc Rapport de StageDokument46 SeitenMarsa Maroc Rapport de StageAli Aourdou100% (2)
- La Logistique Du Transport Maritime Par Conteneurisation PDFDokument97 SeitenLa Logistique Du Transport Maritime Par Conteneurisation PDFM KalouchNoch keine Bewertungen
- La Logistique Des Terminaux Portuaires de ConteneursDokument97 SeitenLa Logistique Des Terminaux Portuaires de ConteneursHatim KwissiNoch keine Bewertungen
- Port Tanger1Dokument7 SeitenPort Tanger1benintissarNoch keine Bewertungen
- Schéma Sectoriel Gestion Des Équipements Portuaires Et Aéroportuaires PDFDokument264 SeitenSchéma Sectoriel Gestion Des Équipements Portuaires Et Aéroportuaires PDFmahdouchfkiNoch keine Bewertungen
- Connaissement Rapp Stage MajstororovicDokument91 SeitenConnaissement Rapp Stage MajstororovicVt OmNoch keine Bewertungen
- PFE BAC 5loptimisation Des Processus DentroposageDokument150 SeitenPFE BAC 5loptimisation Des Processus DentroposageAnouar OmariNoch keine Bewertungen
- Rapport Sur L'exploitation PortauireDokument20 SeitenRapport Sur L'exploitation PortauiremobeneNoch keine Bewertungen
- Rapport Industrie TextileDokument26 SeitenRapport Industrie TextileAmine AbouelouafaNoch keine Bewertungen
- Aménagements Des Ports À SecsDokument124 SeitenAménagements Des Ports À SecsBalhaMontpelliérain100% (2)
- Impact de La Conteneurisation Sur Le Développement DuraleDokument111 SeitenImpact de La Conteneurisation Sur Le Développement Duralerafik bejaia100% (2)
- Projet 2Dokument36 SeitenProjet 2Omar Dhifallah100% (4)
- La Logistique Du Commerce Et La Compétitivité Du MarocDokument32 SeitenLa Logistique Du Commerce Et La Compétitivité Du MarocWalid SaoudNoch keine Bewertungen
- Fiche Port Mohammedia PDFDokument4 SeitenFiche Port Mohammedia PDFHanane SalmiNoch keine Bewertungen
- 6519 16240 1 PBDokument18 Seiten6519 16240 1 PByoussefriifiNoch keine Bewertungen
- Plateformes LogistiquesDokument16 SeitenPlateformes LogistiquesZINEB ZAMEKHCHARINoch keine Bewertungen
- Les Contraintes Logistiques Aux Opérations D'import-ExportDokument146 SeitenLes Contraintes Logistiques Aux Opérations D'import-ExportHakimNoch keine Bewertungen
- Port CasaDokument4 SeitenPort CasaoumNoch keine Bewertungen
- Amélioration Des Performances PortuaireDokument22 SeitenAmélioration Des Performances PortuaireLilyNoch keine Bewertungen
- Rapport MRPDokument21 SeitenRapport MRPdi mytryNoch keine Bewertungen
- Memoire Moune M2 PDFDokument70 SeitenMemoire Moune M2 PDFMoussa Idriss AliNoch keine Bewertungen
- These Khanh Toan TranDokument183 SeitenThese Khanh Toan TransimoNoch keine Bewertungen
- Logistique Terminal À ConteneurDokument202 SeitenLogistique Terminal À ConteneurArsène TIA MANNoch keine Bewertungen
- 20245,2013R05 FRDokument231 Seiten20245,2013R05 FRZe NovNoch keine Bewertungen
- Mémoire Brouillon 2Dokument64 SeitenMémoire Brouillon 2Adore VirgiNoch keine Bewertungen
- Android Manuel Utilisation PDFDokument36 SeitenAndroid Manuel Utilisation PDFAbdelkader ChaouiNoch keine Bewertungen
- La Surete Du Transport Intermodal de ConteneursDokument134 SeitenLa Surete Du Transport Intermodal de ConteneursAbdelkader ChaouiNoch keine Bewertungen
- L'arrimage Des ConteneursDokument86 SeitenL'arrimage Des ConteneursAbdelkader Chaoui100% (4)
- Monographie de La Gestion Portuaire (Echange Des Donnees Informatisees Portuaires)Dokument39 SeitenMonographie de La Gestion Portuaire (Echange Des Donnees Informatisees Portuaires)Abdelkader ChaouiNoch keine Bewertungen
- Methodes Et Outils de Gestion Des PortsDokument73 SeitenMethodes Et Outils de Gestion Des PortsAbdelkader ChaouiNoch keine Bewertungen
- Gestion de Revetement de Terminaux A CNTDokument42 SeitenGestion de Revetement de Terminaux A CNTAbdelkader ChaouiNoch keine Bewertungen
- Cih Bank Rapport de StageDokument48 SeitenCih Bank Rapport de Stagefatima zahra el rhazi100% (1)
- TP: Audite Et Sécurité Informatique D'un Réseau Local D'entrepriseDokument11 SeitenTP: Audite Et Sécurité Informatique D'un Réseau Local D'entrepriseeddy lwakNoch keine Bewertungen
- Migrer Son Systeme D Information Vers Les Logiciels Libres Un Defi Politique Et Technique Pour Les CDokument19 SeitenMigrer Son Systeme D Information Vers Les Logiciels Libres Un Defi Politique Et Technique Pour Les CPhilippe VernayNoch keine Bewertungen
- Facture-E356 2Dokument1 SeiteFacture-E356 2nassimworldNoch keine Bewertungen
- Compta Géné1?Dokument69 SeitenCompta Géné1?kv6dqmjgbqNoch keine Bewertungen
- ExpoDokument18 SeitenExpoMimounGuenfoudiNoch keine Bewertungen
- CV Fev 2022Dokument3 SeitenCV Fev 2022motesteouedraNoch keine Bewertungen
- Analyse AppleDokument2 SeitenAnalyse AppleAmine FekakNoch keine Bewertungen
- Nouveau Document Microsoft WordDokument13 SeitenNouveau Document Microsoft Wordhassanovic06xaviNoch keine Bewertungen
- The Logistic Institute Définit La Logistique Comme Étant Un Ensemble de Fonctions Relatives AuxDokument1 SeiteThe Logistic Institute Définit La Logistique Comme Étant Un Ensemble de Fonctions Relatives AuxSISINoch keine Bewertungen
- IRCertificateDokument1 SeiteIRCertificateericessai90Noch keine Bewertungen
- Fudiciare-Kaslar Final..Dokument39 SeitenFudiciare-Kaslar Final..Mohamed AboufarassNoch keine Bewertungen
- Lean Management &manufacturingDokument6 SeitenLean Management &manufacturingHamid HamidNoch keine Bewertungen
- Commande FacturationDokument10 SeitenCommande FacturationXavier Le Roy100% (1)
- Le Juriste D'affaireDokument4 SeitenLe Juriste D'affairemllelawNoch keine Bewertungen
- Le Marketing Des Ressources Humaines: Attirer, Intégrer Et Fidéliser Les Salariés PDF - Télécharger, LireDokument8 SeitenLe Marketing Des Ressources Humaines: Attirer, Intégrer Et Fidéliser Les Salariés PDF - Télécharger, LireRachid Benhmidou100% (2)
- Note de SynthèseDokument5 SeitenNote de SynthèsePatrikNoch keine Bewertungen
- Benimellal Ta OkDokument7 SeitenBenimellal Ta Okahmed aboutaybNoch keine Bewertungen
- Analyse Comptable 2 Analyse Dexploitation ESGDokument5 SeitenAnalyse Comptable 2 Analyse Dexploitation ESGصفوان ابن براهيم100% (1)
- Partie I-La Rémunération, Définition Et ContexteDokument44 SeitenPartie I-La Rémunération, Définition Et ContexteSAIDA KALIFANoch keine Bewertungen
- Assistant Contrôleur de GestionDokument4 SeitenAssistant Contrôleur de GestionSam TitovNoch keine Bewertungen
- Rapport - ERPDokument6 SeitenRapport - ERPИмане ПхоенихNoch keine Bewertungen
- Conditions Générales Produits - 2021!09!04Dokument49 SeitenConditions Générales Produits - 2021!09!04Janyce PlnnNoch keine Bewertungen
- NF ISO 37001 v.2017 FRDokument63 SeitenNF ISO 37001 v.2017 FRSofia90% (10)
- Secteur Des Transports TOGODokument42 SeitenSecteur Des Transports TOGODermane TadjudiniNoch keine Bewertungen
- Chapitre 6 - Les Effets de CommerceDokument6 SeitenChapitre 6 - Les Effets de CommerceTunENSTAB100% (1)
- RAPPORT STAge Pour L Ecole en LicenceDokument40 SeitenRAPPORT STAge Pour L Ecole en Licenceda100% (4)
- CH 10 Les Marchés FinanciersDokument12 SeitenCH 10 Les Marchés FinanciersLauryne MorvanNoch keine Bewertungen
- Méthodes Dévaluation Dentreprise Cours SuiteDokument5 SeitenMéthodes Dévaluation Dentreprise Cours Suitefitia ramiandrisoa100% (1)
- SCF Cours #04Dokument36 SeitenSCF Cours #04Nabil LebigNoch keine Bewertungen