Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Antenna and Propagation: Introduction + Basic ConceptsDokument19 SeitenAntenna and Propagation: Introduction + Basic Conceptsanon_584636667Noch keine Bewertungen
- Lecture Booklet 10-04-2017Dokument93 SeitenLecture Booklet 10-04-2017WylieNoch keine Bewertungen
- TLV500E ATSC 3 and ATSC 1 DatasheetDokument3 SeitenTLV500E ATSC 3 and ATSC 1 Datasheetlaszlo-368875Noch keine Bewertungen
- Antenna Specifications: Electrical PropertiesDokument6 SeitenAntenna Specifications: Electrical PropertiesRobertNoch keine Bewertungen
- Proprety CommandsDokument117 SeitenProprety Commandsabdellatif hamdane100% (1)
- RG 550 Service ManualDokument76 SeitenRG 550 Service ManualWilliam Naz Okoko100% (1)
- Ece Board Exam AwarenessDokument3 SeitenEce Board Exam AwarenessDarwin TacubanzaNoch keine Bewertungen
- Oe 254 Antenna TM PDFDokument2 SeitenOe 254 Antenna TM PDFMichaelNoch keine Bewertungen
- Radio Receiver Is An Electronic Equipment Which Pick Ups The Desired SignalDokument7 SeitenRadio Receiver Is An Electronic Equipment Which Pick Ups The Desired Signalsachin bNoch keine Bewertungen
- FDK Multi-2700 Instruction ManualDokument23 SeitenFDK Multi-2700 Instruction ManualpieguzNoch keine Bewertungen
- Ee20 F14 HW02Dokument8 SeitenEe20 F14 HW02Taskin KhanNoch keine Bewertungen
- Wall-Mounting Speakers EN 54Dokument5 SeitenWall-Mounting Speakers EN 54Mauricio Yañez PolloniNoch keine Bewertungen
- Laboratory Exercise 3: Discrete Time Signals: Frequency Domain RepresentationsDokument15 SeitenLaboratory Exercise 3: Discrete Time Signals: Frequency Domain RepresentationsdangvuduongNoch keine Bewertungen
- TA2003Dokument7 SeitenTA2003calinsatNoch keine Bewertungen
- W2&W3. Ch2.0 Transmission Line Theory v0.2Dokument74 SeitenW2&W3. Ch2.0 Transmission Line Theory v0.2zetty_rashidNoch keine Bewertungen
- On Cruise Control DeviceDokument18 SeitenOn Cruise Control DeviceVikas Yadav100% (1)
- Rfid Based Embedded System For Vehicle Tracking and Prevention of Road Accidents IJERTV1IS6474Dokument5 SeitenRfid Based Embedded System For Vehicle Tracking and Prevention of Road Accidents IJERTV1IS6474dhananjay patilNoch keine Bewertungen
- Data Sheet AD8232Dokument28 SeitenData Sheet AD8232claudia khansa'100% (1)
- Signal CommunicationDokument36 SeitenSignal CommunicationKayla Marie CagoNoch keine Bewertungen
- NBSC - The Prototype Televisor MK - 4Dokument2 SeitenNBSC - The Prototype Televisor MK - 4Sebastian CostaNoch keine Bewertungen
- Service Manual: Mini Hi-Fi Component SystemDokument86 SeitenService Manual: Mini Hi-Fi Component Systemzxcasdwp100% (1)
- Diverse Equipment For Sale From Power Storm 4SP03141157Dokument2 SeitenDiverse Equipment For Sale From Power Storm 4SP03141157Simon AvilesNoch keine Bewertungen
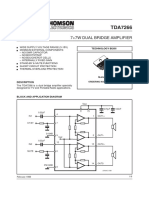
- 7+7W Dual Bridge Amplifier: Technology Bi20IiDokument10 Seiten7+7W Dual Bridge Amplifier: Technology Bi20IiRuben Dario Dulcey LeonNoch keine Bewertungen
- Ao-Ofdm Final ProjectDokument190 SeitenAo-Ofdm Final ProjectAliAzarniaNoch keine Bewertungen
- Tinybridge-100: Installation and Operation ManualDokument9 SeitenTinybridge-100: Installation and Operation ManualchmroNoch keine Bewertungen
- Sample QuestionsDokument108 SeitenSample QuestionsAaje Baaje67% (3)
- Antenna TrainerDokument22 SeitenAntenna TrainerSibasish Singh SamantaNoch keine Bewertungen
- AFOT SeriesDokument72 SeitenAFOT SeriesCristihan RenteriaNoch keine Bewertungen
- Difference Between Cell Splitting and Cell Sectoring - Difference BetweenDokument1 SeiteDifference Between Cell Splitting and Cell Sectoring - Difference BetweenAlbert OmondiNoch keine Bewertungen
- 1ET400A - Product Brief (1.01)Dokument8 Seiten1ET400A - Product Brief (1.01)SakulaNoch keine Bewertungen