Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Coal Handling PlantDokument29 SeitenCoal Handling PlantRaj_Jai03Noch keine Bewertungen
- Harp Syllabus 2009Dokument82 SeitenHarp Syllabus 2009PainwheelNoch keine Bewertungen
- Tokimeki MemorialDokument112 SeitenTokimeki MemorialYoko MinaminoNoch keine Bewertungen
- Layout of Thermal Power PlantDokument21 SeitenLayout of Thermal Power PlantRaj_Jai03100% (1)
- Netzwerkloesungen Mit IEC 61850-3 - IEEE 1613 Von MoxaDokument68 SeitenNetzwerkloesungen Mit IEC 61850-3 - IEEE 1613 Von MoxaJessica DeanNoch keine Bewertungen
- Android AdvisorREVISTA 17 - 2015 UKDokument100 SeitenAndroid AdvisorREVISTA 17 - 2015 UKFlorinNoch keine Bewertungen
- Flow Meter Selection PDFDokument6 SeitenFlow Meter Selection PDFRaj_Jai03Noch keine Bewertungen
- Communication Media For Scada SystemsDokument10 SeitenCommunication Media For Scada Systemsmuzammiliqbal50% (2)
- FO Cables enDokument172 SeitenFO Cables enRaj_Jai03Noch keine Bewertungen
- Generation of Electricity From CoalDokument51 SeitenGeneration of Electricity From CoalRaj_Jai03Noch keine Bewertungen
- Ip TelephonyDokument13 SeitenIp TelephonyDinesh GoudNoch keine Bewertungen
- Wind Turbines Brochure EngDokument16 SeitenWind Turbines Brochure EngRaj_Jai03Noch keine Bewertungen
- Release LetterDokument1 SeiteRelease LetterRaj_Jai03Noch keine Bewertungen
- Windaccess Scada Control System Onshore Offshore WindDokument2 SeitenWindaccess Scada Control System Onshore Offshore WindRaj_Jai03Noch keine Bewertungen
- Oil and Gas Networks - V14Dokument5 SeitenOil and Gas Networks - V14Raj_Jai03Noch keine Bewertungen
- Optical Telemetry SystemDokument17 SeitenOptical Telemetry SystemJanak MehtaNoch keine Bewertungen
- Cable Block DiagramDokument1 SeiteCable Block DiagramgormankungNoch keine Bewertungen
- GATE SyllabusDokument3 SeitenGATE Syllabusvivek_vivek_449Noch keine Bewertungen
- Co ChannelInterferenceDokument5 SeitenCo ChannelInterferenceRaj_Jai03Noch keine Bewertungen
- GPRS ConnectivityDokument7 SeitenGPRS Connectivitykwame83Noch keine Bewertungen
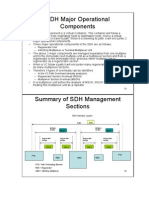
- SDH Major Operational Components: - Regenerator Unit - Add-Drop Multiplexer or Terminal Multiplexer UnitDokument8 SeitenSDH Major Operational Components: - Regenerator Unit - Add-Drop Multiplexer or Terminal Multiplexer UnitRaj_Jai03Noch keine Bewertungen
- 660MW Air Cooled CondenserDokument26 Seiten660MW Air Cooled CondenserRaj_Jai030% (1)
- 3G Network Performance Drive TestDokument7 Seiten3G Network Performance Drive Testapi-3806249100% (5)
- Section OverheadsDokument5 SeitenSection OverheadsRaj_Jai03Noch keine Bewertungen
- Section OverheadsDokument5 SeitenSection OverheadsRaj_Jai03Noch keine Bewertungen
- SDH FramingDokument3 SeitenSDH FramingRaj_Jai03Noch keine Bewertungen
- So NetDokument110 SeitenSo NetRaj_Jai03Noch keine Bewertungen
- Link Budget CalculationDokument2 SeitenLink Budget CalculationRaj_Jai03Noch keine Bewertungen
- Employee Evaluation Form: Tenon & Groove Software PVT - LTDDokument4 SeitenEmployee Evaluation Form: Tenon & Groove Software PVT - LTDrkarjee100% (4)
- Telecom GuideDokument176 SeitenTelecom GuideRaj_Jai03Noch keine Bewertungen
- Music Retrieval and Recommendation: A Tutorial OverviewDokument4 SeitenMusic Retrieval and Recommendation: A Tutorial OverviewJônatas CastroNoch keine Bewertungen
- Biography Raisa AdrianaDokument5 SeitenBiography Raisa AdrianaSinarAbadiPonselNoch keine Bewertungen
- Beethoven Sonata 19Dokument4 SeitenBeethoven Sonata 19MorlaNoch keine Bewertungen
- Habits Successful Wind Ensamble PDFDokument12 SeitenHabits Successful Wind Ensamble PDFJesus Campo100% (3)
- Soal Un 5 2013Dokument6 SeitenSoal Un 5 2013LeonardoMonandarNoch keine Bewertungen
- Prezentare FestoDokument10 SeitenPrezentare FestoPitigoi RoxanaNoch keine Bewertungen
- Challenging Popular Media's Control by Teaching Critical ViewingDokument7 SeitenChallenging Popular Media's Control by Teaching Critical ViewingNirmala BandooNoch keine Bewertungen
- Communication and Alarm SystemDokument30 SeitenCommunication and Alarm SystemwendelNoch keine Bewertungen
- Vizag Steel Interview Schedule HyderabadDokument4 SeitenVizag Steel Interview Schedule HyderabadKabya SrivastavaNoch keine Bewertungen
- BharatDokument18 SeitenBharatPuneet TatranNoch keine Bewertungen
- First Repertoire For Two GuitarsDokument49 SeitenFirst Repertoire For Two Guitarsmnimeni3617100% (23)
- Rock Guitar BasicsDokument3 SeitenRock Guitar Basicsaliscribd46Noch keine Bewertungen
- Dexter Gordon - GO! (Transcripciones) D PDFDokument37 SeitenDexter Gordon - GO! (Transcripciones) D PDFfacundo100% (2)
- (Clarinet - Institute) Klose - Complete Method For The Clarinet PDFDokument194 Seiten(Clarinet - Institute) Klose - Complete Method For The Clarinet PDFAndres Jimenez Garcia100% (1)
- Vixen by Jillian LarkinDokument19 SeitenVixen by Jillian LarkinRandom House Teens0% (1)
- Csbook PDFDokument48 SeitenCsbook PDFrajwosa100% (1)
- A New OEM Manufacturer: Bomare CompanyDokument7 SeitenA New OEM Manufacturer: Bomare CompanyAlexander WieseNoch keine Bewertungen
- Modulo FRSky FutabaFM para 2 4Dokument2 SeitenModulo FRSky FutabaFM para 2 4AltemarFernandesdeOliveiraNoch keine Bewertungen
- Distance Protection - Fast and Accurate Fault DetectionDokument76 SeitenDistance Protection - Fast and Accurate Fault DetectionPasopati MadeNoch keine Bewertungen
- Mod 4 Part1 WCCDokument7 SeitenMod 4 Part1 WCCArham SyedNoch keine Bewertungen
- Eddfcyyz PDF 1519816233Dokument61 SeitenEddfcyyz PDF 1519816233HendrikNoch keine Bewertungen
- The Lost Battalion EssayDokument2 SeitenThe Lost Battalion Essayapi-336625608100% (1)
- Harris Cheese BitsDokument18 SeitenHarris Cheese BitssankopubNoch keine Bewertungen
- Bu 02 Data Gathering No. 1Dokument32 SeitenBu 02 Data Gathering No. 1Judelle GumallaoiNoch keine Bewertungen
- Say So Chords: Doja CatDokument5 SeitenSay So Chords: Doja CatLaunce Joshua Lab-ong DayaoNoch keine Bewertungen
- Premier 2012Dokument28 SeitenPremier 2012RomanNoch keine Bewertungen
- Activity 4.1011Dokument2 SeitenActivity 4.1011RyanTimario50% (2)
- Avengers Theme-Cello 2Dokument2 SeitenAvengers Theme-Cello 2renatocomeairisNoch keine Bewertungen