Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Introduction to Power Transmission CouplingsDokument51 SeitenIntroduction to Power Transmission CouplingsNagy ElrasheedyNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Alignment: Application and Installation GuideDokument28 SeitenAlignment: Application and Installation GuideJonathan Javier Ceballos BonillaNoch keine Bewertungen
- M Hendry SSS Clutch Frm6UG07 Clutch DesignDokument37 SeitenM Hendry SSS Clutch Frm6UG07 Clutch Designchugo02Noch keine Bewertungen
- Fuel Oil Handling System (FOHS) - HFO - LDO - LSHSDokument8 SeitenFuel Oil Handling System (FOHS) - HFO - LDO - LSHSCHHABIKANT SAHUNoch keine Bewertungen
- Specification of Pumps For Stationary Fire Fighting InstallationsDokument14 SeitenSpecification of Pumps For Stationary Fire Fighting InstallationsVaibhav Sawant100% (2)
- Coal Handling Plant Pre Start CheckDokument11 SeitenCoal Handling Plant Pre Start CheckBlitz Xyrus100% (2)
- SIEMENS - Ingenieria MecanicaDokument141 SeitenSIEMENS - Ingenieria MecanicaDavid Soto SedanoNoch keine Bewertungen
- Nabtesco RD eDokument82 SeitenNabtesco RD eЕкатерина КалашниковаNoch keine Bewertungen
- 1791 e Cr417 en GPK Smart Connection Technology For Voith Turbo Fluid CouplingsDokument2 Seiten1791 e Cr417 en GPK Smart Connection Technology For Voith Turbo Fluid CouplingsLazar MihailNoch keine Bewertungen
- An Organization Study On Rydon Industries at CBEDokument40 SeitenAn Organization Study On Rydon Industries at CBElavanya mohanNoch keine Bewertungen
- MPTA C2c-2002 R2015: Mechanical Power Transmission Association 5672 Strand Ct. Suite 2, Naples, FL 34110Dokument19 SeitenMPTA C2c-2002 R2015: Mechanical Power Transmission Association 5672 Strand Ct. Suite 2, Naples, FL 34110l_aguilar_mNoch keine Bewertungen
- Accessories Verins ShefferDokument20 SeitenAccessories Verins ShefferAristideNoch keine Bewertungen
- Aerator PremiumDokument10 SeitenAerator PremiumvijaykumarnNoch keine Bewertungen
- Worm Gearbox Bearing Life PredictionDokument6 SeitenWorm Gearbox Bearing Life Predictionhangmann169Noch keine Bewertungen
- Koperasi Karyawan SierDokument4 SeitenKoperasi Karyawan Sierarief hardiyansyahNoch keine Bewertungen
- Messrs. SM Cyclo de Chile Ltda.: Orden Interna Sumitomo CHD1A064 Orden Interna Weir Minerals 189316Dokument36 SeitenMessrs. SM Cyclo de Chile Ltda.: Orden Interna Sumitomo CHD1A064 Orden Interna Weir Minerals 189316Leonardo SilvaNoch keine Bewertungen
- Notice No.6 Rules and Regulations For The Classification of Ships JulyDokument5 SeitenNotice No.6 Rules and Regulations For The Classification of Ships JulyrickNoch keine Bewertungen
- Catalogo de CouplingsDokument32 SeitenCatalogo de CouplingsjoravicaNoch keine Bewertungen
- ZF 665a Data SheetDokument4 SeitenZF 665a Data Sheetluisdavid01Noch keine Bewertungen
- Design ProblemsDokument13 SeitenDesign ProblemsAristotle RiveraNoch keine Bewertungen
- An Overview of Mathematical Models Used in Gear DynamicsDokument8 SeitenAn Overview of Mathematical Models Used in Gear DynamicsPolitik Itu KejamNoch keine Bewertungen
- DME-Cotter and Knuckle JointDokument91 SeitenDME-Cotter and Knuckle JointAnjanKumarMishraNoch keine Bewertungen
- Parts Guide Manual: Bizhub 420/bizhub 500Dokument152 SeitenParts Guide Manual: Bizhub 420/bizhub 500George ConstantinoiuNoch keine Bewertungen
- AGN 234 - Generating Set Assembly - AlignmentDokument6 SeitenAGN 234 - Generating Set Assembly - AlignmentbaljeetjatNoch keine Bewertungen
- T1509UK насос центробежныйDokument11 SeitenT1509UK насос центробежныйasaturday85Noch keine Bewertungen
- Engineering GraphicsDokument7 SeitenEngineering Graphicsrida abidNoch keine Bewertungen
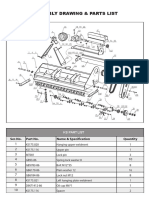
- Assembly Drawing & Parts List: Ser - No. Part No. Name & Specification QuantityDokument3 SeitenAssembly Drawing & Parts List: Ser - No. Part No. Name & Specification QuantityOskars RozefeldsNoch keine Bewertungen
- Catalogo Centaflex Serie ADokument15 SeitenCatalogo Centaflex Serie ACarlos Gallardo LagosNoch keine Bewertungen
- Theory of MachinesDokument50 SeitenTheory of MachinesHari Prasad100% (1)
- Driven End Driving End: HF20 Gear Coupling Mount (With Delay Fill Chamber)Dokument1 SeiteDriven End Driving End: HF20 Gear Coupling Mount (With Delay Fill Chamber)war machineNoch keine Bewertungen