Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Graduation Speech For PNHSDokument8 SeitenGraduation Speech For PNHSxxxxNoch keine Bewertungen
- ST10F280 JT3Dokument186 SeitenST10F280 JT3Carlos Geeket' El HalabiNoch keine Bewertungen
- Classroom-Observation-Sheet Sixth GradeDokument2 SeitenClassroom-Observation-Sheet Sixth GradeLore CarandaNoch keine Bewertungen
- Mysql vs. SqliteDokument15 SeitenMysql vs. SqlitePedro Leite (Mindset Épico)Noch keine Bewertungen
- Bhabha of Mimicry and ManDokument10 SeitenBhabha of Mimicry and ManKevin Daniel RozoNoch keine Bewertungen
- To Err Is Human To Forgive Is Divine EssayDokument4 SeitenTo Err Is Human To Forgive Is Divine Essayibnorvbaf100% (2)
- Part 2 Picture Description: para Empezar La ComparaciónDokument5 SeitenPart 2 Picture Description: para Empezar La ComparaciónMariola Valencia EstévezNoch keine Bewertungen
- Chapter 3 - SelectionsDokument52 SeitenChapter 3 - Selectionsnaqibullah2022faryabNoch keine Bewertungen
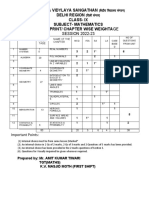
- Maths Ix BlueprintDokument1 SeiteMaths Ix BlueprintKavita RawatNoch keine Bewertungen
- Most Common Types of INVERSION, FRONTING and EMPHASIS in "Alapvizsga"Dokument1 SeiteMost Common Types of INVERSION, FRONTING and EMPHASIS in "Alapvizsga"Vivien SápiNoch keine Bewertungen
- Firqhe Ahale Hadees Ka Seenay Par Haath BandhnaDokument2 SeitenFirqhe Ahale Hadees Ka Seenay Par Haath Bandhnarubs_safdarNoch keine Bewertungen
- Bhīmasena As Bhairava in Nepal : SummaryDokument22 SeitenBhīmasena As Bhairava in Nepal : Summaryalish shrsethaNoch keine Bewertungen
- Literature Review For DummiesDokument7 SeitenLiterature Review For Dummiesea44a6t7100% (1)
- FCE Writing GuideDokument44 SeitenFCE Writing GuideAmparo Amorena100% (2)
- 5 Reasons The Catholic Church Is The True ChurchDokument31 Seiten5 Reasons The Catholic Church Is The True ChurchJj ArabitNoch keine Bewertungen
- 2 The Star and The Lily-Module 3Dokument11 Seiten2 The Star and The Lily-Module 3gokilaNoch keine Bewertungen
- IP Microwave Solution - 20090617-V4Dokument51 SeitenIP Microwave Solution - 20090617-V4Gossan Anicet100% (2)
- Lirik Christian BautistaDokument3 SeitenLirik Christian Bautistahandri03061989Noch keine Bewertungen
- A Brief Guide To Armenian Musical NotatiDokument17 SeitenA Brief Guide To Armenian Musical NotatiAvraam PapaioannouNoch keine Bewertungen
- The Stranger CommentaryDokument5 SeitenThe Stranger Commentaryalonso93Noch keine Bewertungen
- CRWT Reviewer CompleteDokument10 SeitenCRWT Reviewer CompleteNorhaifa Hadji EbrahimNoch keine Bewertungen
- Form 1 English Mid Term Exam 2017Dokument13 SeitenForm 1 English Mid Term Exam 2017XinTxin Chong86% (7)
- Mock Exam 7-KeyDokument15 SeitenMock Exam 7-KeyHa Le100% (3)
- Dllnov 16Dokument1 SeiteDllnov 16Chamile BrionesNoch keine Bewertungen
- Sunil Gangopadhyay - Those Days - A Novel-Penguin Books LTD (2000) PDFDokument668 SeitenSunil Gangopadhyay - Those Days - A Novel-Penguin Books LTD (2000) PDFAbhijeet JhaNoch keine Bewertungen
- THE BOOK OF THE TWELVE and THE NEW FORM PDFDokument380 SeitenTHE BOOK OF THE TWELVE and THE NEW FORM PDFEq Brown100% (1)
- 1-1 Review - Four Types of Sentences - SMRT EnglishDokument8 Seiten1-1 Review - Four Types of Sentences - SMRT EnglishAlejandra CruzNoch keine Bewertungen
- LESSON 2-Japanese LiteratureDokument11 SeitenLESSON 2-Japanese LiteratureArriane ReyesNoch keine Bewertungen
- Monsters Are Due On Maple Street. Lesson - StoryDokument24 SeitenMonsters Are Due On Maple Street. Lesson - StoryRENATA AMETNoch keine Bewertungen
- A. Grammar - Relative Clauses: Unit 8 - New Ways To LearnDokument3 SeitenA. Grammar - Relative Clauses: Unit 8 - New Ways To LearnDo YoungNoch keine Bewertungen