Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Control RoomDokument24 SeitenControl Roomsarsan nedumkuzhi maniNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- ServiceNow Certified System AdministratoDokument19 SeitenServiceNow Certified System Administratocamis_vieiraNoch keine Bewertungen
- Ccna 1º SemestreDokument189 SeitenCcna 1º SemestreMarta MoratillaNoch keine Bewertungen
- Key Brand Elements: How-To GuideDokument7 SeitenKey Brand Elements: How-To GuideDemand MetricNoch keine Bewertungen
- DELEM Install GBDokument81 SeitenDELEM Install GBSylwester C.Noch keine Bewertungen
- Data Acquisition & Processing ReportDokument148 SeitenData Acquisition & Processing Reportvlady120489Noch keine Bewertungen
- A Project Report On "Brand Strategy"Dokument42 SeitenA Project Report On "Brand Strategy"abhijit05533% (3)
- Pusk - Bkl-Permohonan DatabaseDokument45 SeitenPusk - Bkl-Permohonan DatabaseSarjanaMudaNoch keine Bewertungen
- 10 1 1 5 341Dokument35 Seiten10 1 1 5 341vlady120489Noch keine Bewertungen
- Comunicaciones Industriales Rodriguez Penin Aquili PDFDokument302 SeitenComunicaciones Industriales Rodriguez Penin Aquili PDFAlexxsNoch keine Bewertungen
- Lance Hoist DriveDokument7 SeitenLance Hoist Drivevlady120489Noch keine Bewertungen
- LabVIEW HandoutsDokument24 SeitenLabVIEW Handoutsvlady120489Noch keine Bewertungen
- Fuzzy Model Identification Based On Cluster EstimationDokument12 SeitenFuzzy Model Identification Based On Cluster Estimationvlady120489Noch keine Bewertungen
- PID Control in LabVIEW PDFDokument147 SeitenPID Control in LabVIEW PDFRAFFI HASSAN BASHANoch keine Bewertungen
- Adaptive-Network-Based Fuzzy Inference SystemDokument45 SeitenAdaptive-Network-Based Fuzzy Inference Systemvlady120489Noch keine Bewertungen
- Fuzzy Sets-Information and Control-1965Dokument16 SeitenFuzzy Sets-Information and Control-1965afa33Noch keine Bewertungen
- On A Type-2 Fuzzy Clustering Algorithm: Leehter Yao and Kuei-Sung WengDokument6 SeitenOn A Type-2 Fuzzy Clustering Algorithm: Leehter Yao and Kuei-Sung Wengvlady120489Noch keine Bewertungen
- Fuzzy Model Identification Based On Cluster EstimationDokument12 SeitenFuzzy Model Identification Based On Cluster Estimationvlady120489Noch keine Bewertungen
- Stability Analysis and Synthesis of Multivariable Fuzzy Systems Using Interval ArithmeticDokument7 SeitenStability Analysis and Synthesis of Multivariable Fuzzy Systems Using Interval Arithmeticvlady120489Noch keine Bewertungen
- Stability Design of TS Model - 97Dokument4 SeitenStability Design of TS Model - 97vlady120489Noch keine Bewertungen
- Stability Design of TS Model - 97Dokument4 SeitenStability Design of TS Model - 97vlady120489Noch keine Bewertungen
- Similarity Measures in Fuzzy Rule Base SimplificationDokument11 SeitenSimilarity Measures in Fuzzy Rule Base Simplificationvlady120489Noch keine Bewertungen
- Reduction of Fuzzy Rule Base Via Singular Value DecompositionDokument14 SeitenReduction of Fuzzy Rule Base Via Singular Value Decompositionvlady120489Noch keine Bewertungen
- Takagi Sugeno ModelingDokument17 SeitenTakagi Sugeno ModelingCesario GillasNoch keine Bewertungen
- Comparison of Fuzzy Reasoning MethodsDokument31 SeitenComparison of Fuzzy Reasoning Methodsvlady120489Noch keine Bewertungen
- On The Issue of Defuzzification and Selection Based On A The Fuzzy SetDokument17 SeitenOn The Issue of Defuzzification and Selection Based On A The Fuzzy Setvlady120489Noch keine Bewertungen
- Triangular Norms. Position Paper IIDokument28 SeitenTriangular Norms. Position Paper IIvlady120489Noch keine Bewertungen
- Fuzzy Controls Under Various Fuzzy Reasoning MethodsDokument23 SeitenFuzzy Controls Under Various Fuzzy Reasoning Methodsvlady120489Noch keine Bewertungen
- Triangular Norms. Position Paper IIIDokument16 SeitenTriangular Norms. Position Paper IIIvlady120489Noch keine Bewertungen
- Babcock JDokument318 SeitenBabcock Jvlady120489Noch keine Bewertungen
- On The Issue of Defuzzification and Selection Based On A The Fuzzy SetDokument17 SeitenOn The Issue of Defuzzification and Selection Based On A The Fuzzy Setvlady120489Noch keine Bewertungen
- Triangular Norms. Position Paper IDokument22 SeitenTriangular Norms. Position Paper Ivlady120489Noch keine Bewertungen
- Sensors and TransducersDokument9 SeitenSensors and TransducersPra BhuNoch keine Bewertungen
- Design Systems Formatted PDFDokument66 SeitenDesign Systems Formatted PDFOleksiy OsiychukNoch keine Bewertungen
- Micom P40 AgileDokument386 SeitenMicom P40 AgilesanthoshNoch keine Bewertungen
- PI Web Services 2010 R3 User GuideDokument137 SeitenPI Web Services 2010 R3 User GuideJovano BarpNoch keine Bewertungen
- Determine HWM and Reduce It by Shrink SpaceDokument6 SeitenDetermine HWM and Reduce It by Shrink SpaceSiva KumarNoch keine Bewertungen
- A Conceptual Model For Electronic Document and Records Management System Adoption in Malaysian Public SectorDokument8 SeitenA Conceptual Model For Electronic Document and Records Management System Adoption in Malaysian Public SectorAronza LeeNoch keine Bewertungen
- Name Any Three Client Applications To Connect With FTP ServerDokument5 SeitenName Any Three Client Applications To Connect With FTP ServerI2414 Hafiz Muhammad Zeeshan E1Noch keine Bewertungen
- Using IComparer IComparable For Sorting in WPFDokument6 SeitenUsing IComparer IComparable For Sorting in WPFAbhiNoch keine Bewertungen
- QCA9533Dokument4 SeitenQCA9533BasuragaCirebonNoch keine Bewertungen
- Identifying The Firmware of A Qlogic or Emulex FC HBADokument2 SeitenIdentifying The Firmware of A Qlogic or Emulex FC HBArohitNoch keine Bewertungen
- RAN3308: Flexi RFM 3T6R 2100Dokument2 SeitenRAN3308: Flexi RFM 3T6R 2100Reza BordbarNoch keine Bewertungen
- Dwi Hadianti, S.E: Mypersonal Profile Work ExperienceDokument1 SeiteDwi Hadianti, S.E: Mypersonal Profile Work ExperienceBumn Kuala Tungkal HebatNoch keine Bewertungen
- RDI Tools User GuideDokument58 SeitenRDI Tools User GuideRam MugeshNoch keine Bewertungen
- Semi-Automatic Digital Micro Vickers Hardness Testing Machine (Tester) DVS-1XYDokument8 SeitenSemi-Automatic Digital Micro Vickers Hardness Testing Machine (Tester) DVS-1XY周记伟Noch keine Bewertungen
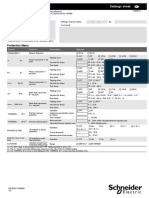
- VIP400 Settings Sheet NRJED311208ENDokument2 SeitenVIP400 Settings Sheet NRJED311208ENVăn NguyễnNoch keine Bewertungen
- Auto Power ManualDokument97 SeitenAuto Power ManualAngel100% (1)
- HettichDokument74 SeitenHettichomkarniranjanNoch keine Bewertungen
- Puana Cell Phone Search WarrantDokument24 SeitenPuana Cell Phone Search WarrantHNN67% (3)
- Salterbaxter - Directions Supplement - Online Investor CentresDokument6 SeitenSalterbaxter - Directions Supplement - Online Investor Centressalterbaxter100% (2)
- Ahb7816t ElDokument3 SeitenAhb7816t ElcjtrybiecNoch keine Bewertungen
- Advanced High-Capacity Synchronization Solution: Your BenefitsDokument6 SeitenAdvanced High-Capacity Synchronization Solution: Your BenefitsTuan MANoch keine Bewertungen
- Steps To Replace Spare Parts of KX5600Dokument5 SeitenSteps To Replace Spare Parts of KX5600Freire Jose FranciscoNoch keine Bewertungen
- Low-Cost Dual-Band E-Shaped Patch Antenna For Energy Harvesting Applications Using Grey Wolf OptimizerDokument5 SeitenLow-Cost Dual-Band E-Shaped Patch Antenna For Energy Harvesting Applications Using Grey Wolf Optimizermubeen khanNoch keine Bewertungen