Das könnte Ihnen auch gefallen
- KKT Ejercicios ResueltosDokument8 SeitenKKT Ejercicios ResueltosSeba Trigo100% (1)
- Tarea MTM Estudio Del Trabajo 2Dokument9 SeitenTarea MTM Estudio Del Trabajo 2Charly Romero100% (1)
- TornoDokument38 SeitenTornoEmmanuel LaraNoch keine Bewertungen
- Ensayos Tecnológicos JuniorDokument9 SeitenEnsayos Tecnológicos Junioralex jordanNoch keine Bewertungen
- Plano Tapeta de CierreDokument1 SeitePlano Tapeta de CierreLuis Cordova ChavezNoch keine Bewertungen
- Plan de Negocio SMART GREENDokument70 SeitenPlan de Negocio SMART GREENEduardoNoch keine Bewertungen
- Subestación Eléctrica CBADokument19 SeitenSubestación Eléctrica CBAObed Omar Armas ChontayNoch keine Bewertungen
- PC02 - Mci PDFDokument3 SeitenPC02 - Mci PDFKennedy Vargas MarceloNoch keine Bewertungen
- Proyecto 2 MecanizadoDokument15 SeitenProyecto 2 Mecanizadoleuris diazNoch keine Bewertungen
- A-Pract Calif Electroneum-2018-IIDokument6 SeitenA-Pract Calif Electroneum-2018-IIAlexis VYNoch keine Bewertungen
- Practica 9 - Mecanizado Por FresadoDokument3 SeitenPractica 9 - Mecanizado Por FresadoAntonio Jorge Aranda GomezNoch keine Bewertungen
- Laboratorio 2 - AvanceDokument18 SeitenLaboratorio 2 - AvanceKatherine PuellesNoch keine Bewertungen
- La LavadoraDokument10 SeitenLa LavadoraCarlooss Contreras100% (1)
- Fresadora ConvencionalDokument3 SeitenFresadora ConvencionalJesus HomeroNoch keine Bewertungen
- CNC Facultad TecnológicaDokument4 SeitenCNC Facultad TecnológicaJanna GamboaNoch keine Bewertungen
- KardexDokument31 SeitenKardexAlexis SebasNoch keine Bewertungen
- Ejercicios de Adm de Calidad Parte 1Dokument2 SeitenEjercicios de Adm de Calidad Parte 1Kevin Cordova HidalgoNoch keine Bewertungen
- Informe TORNODokument17 SeitenInforme TORNOAldair AHNoch keine Bewertungen
- Muelles para MatriceríaDokument11 SeitenMuelles para MatriceríaAratz17Noch keine Bewertungen
- Metodo GUT para Priorizar Actividades. Por Raul A. Perez-Verzini - Instructor TPM de Action GroupDokument3 SeitenMetodo GUT para Priorizar Actividades. Por Raul A. Perez-Verzini - Instructor TPM de Action GroupRaul A. Perez VerziniNoch keine Bewertungen
- Hombro DolorosoDokument1 SeiteHombro DolorosoYulisa Martínez MejíaNoch keine Bewertungen
- Guillen Iparraguirre, JoelDokument202 SeitenGuillen Iparraguirre, JoelKarin AndersonNoch keine Bewertungen
- Informe Plomada CompletoDokument16 SeitenInforme Plomada CompletoEdwin ReveloNoch keine Bewertungen
- CCP EF p1Dokument3 SeitenCCP EF p1Julio EscalónNoch keine Bewertungen
- Código para Calculadora en ATmega328PDokument5 SeitenCódigo para Calculadora en ATmega328PSebastian Vera MoralesNoch keine Bewertungen
- INFORME N°4 Marco TeoricoDokument9 SeitenINFORME N°4 Marco TeoricoLeonardo VillanuevaNoch keine Bewertungen
- Simbologia EléctricaDokument17 SeitenSimbologia EléctricaAndres SanchezNoch keine Bewertungen
- Bryanda Cecilia Navarro LopezDokument79 SeitenBryanda Cecilia Navarro Lopezmercurio04Noch keine Bewertungen
- Guía de Práctica N°6 Torneado (Desbaste, Acabado y RanuradoDokument39 SeitenGuía de Práctica N°6 Torneado (Desbaste, Acabado y RanuradoAnonymous KpVJDm2YmYNoch keine Bewertungen
- Semana 01. Sesión 01. Diseño de MecanismosDokument28 SeitenSemana 01. Sesión 01. Diseño de MecanismosDavid MachacaNoch keine Bewertungen
- 06 DCL TextoDokument16 Seiten06 DCL TextoROSALES BAUTISTA JEAN PAULNoch keine Bewertungen
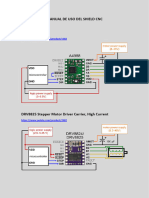
- Manual de Uso Del Shield CNCDokument3 SeitenManual de Uso Del Shield CNCFrank Ronneseth DionicioNoch keine Bewertungen
- Practica FresadoraDokument15 SeitenPractica FresadoraJack Fatima PattisonNoch keine Bewertungen
- Clase Metodo Simplex Dual PDFDokument3 SeitenClase Metodo Simplex Dual PDFLeonardo Rodriguez FlorianNoch keine Bewertungen
- Torneado ParaleloDokument19 SeitenTorneado ParaleloMabel MonteroNoch keine Bewertungen
- Exposicion de RCMDokument21 SeitenExposicion de RCMFrank Rene Carcasi CasasNoch keine Bewertungen
- Act 5 LAB DSM 1665894Dokument7 SeitenAct 5 LAB DSM 1665894Jorge RodríguezNoch keine Bewertungen
- TornoDokument7 SeitenTornoJessica AndreaNoch keine Bewertungen
- UcsmDokument8 SeitenUcsmGerardo Chavez MartinezNoch keine Bewertungen
- Trabajo 2 FINANCIAMIENTO DE COM. INTER.Dokument11 SeitenTrabajo 2 FINANCIAMIENTO DE COM. INTER.Fred FloresNoch keine Bewertungen
- Definicion e Historia Del TornoDokument28 SeitenDefinicion e Historia Del TornoGhino Xavier Huertas PaicoNoch keine Bewertungen
- Mitsubishi Melfa RVDokument6 SeitenMitsubishi Melfa RVLuis Carlos Zambrano RiañoNoch keine Bewertungen
- Barras Estáticamente Indeterminadas en TorsiónDokument1 SeiteBarras Estáticamente Indeterminadas en TorsiónJoan Sebastian Sandoval ParraNoch keine Bewertungen
- 5 Clase 2Dokument20 Seiten5 Clase 2Michael Obispo GaliciaNoch keine Bewertungen
- Motor Hidraulico MonografiaDokument10 SeitenMotor Hidraulico MonografiaOscar VelardeNoch keine Bewertungen
- Estadistica II (Parte 1)Dokument10 SeitenEstadistica II (Parte 1)emaco17Noch keine Bewertungen
- Fim UniDokument3 SeitenFim UniermapNoch keine Bewertungen
- Secuencia Neumatica Con PLCDokument9 SeitenSecuencia Neumatica Con PLCFelix Alfredo Vilchez TupayachiNoch keine Bewertungen
- Material Omcn Programacion F Letra BDokument11 SeitenMaterial Omcn Programacion F Letra BFernando Pasten FernandezNoch keine Bewertungen
- Justificacion para La Instalacion Del Auto CadDokument6 SeitenJustificacion para La Instalacion Del Auto CadJenrry Jesse Diaz RuizNoch keine Bewertungen
- Brazo Robótico 5GDL BroDokument15 SeitenBrazo Robótico 5GDL BroDennis J Mujik100% (1)
- 3 PDFDokument7 Seiten3 PDFBooris Alejandro Leal DietzNoch keine Bewertungen
- Citrus Z450Dokument2 SeitenCitrus Z450elvis oriasNoch keine Bewertungen
- Maquina Fresadora HorizontalDokument42 SeitenMaquina Fresadora HorizontalJosé LuisNoch keine Bewertungen
- Conjunto de Máquinas y Herramientas Que Permiten Mecanizar Piezas de Forma Geométrica de RevoluciónDokument68 SeitenConjunto de Máquinas y Herramientas Que Permiten Mecanizar Piezas de Forma Geométrica de RevoluciónJLuis FloresNoch keine Bewertungen
- TEMA 07 - Creación y Diseño de Sistemas de TuberíasDokument88 SeitenTEMA 07 - Creación y Diseño de Sistemas de TuberíasYsabel GuerreroNoch keine Bewertungen
- GUIA 4 Circuitos Eléctricos2 BEGAZO GARCIADokument9 SeitenGUIA 4 Circuitos Eléctricos2 BEGAZO GARCIAAntony Begazo GarciaNoch keine Bewertungen
- 002 TrigonometryDokument20 Seiten002 Trigonometrycosmeloaiza100% (1)
- Informe Brazo RoboticoDokument27 SeitenInforme Brazo RoboticoArthur Morales Dionicio0% (1)
- Protocolo Brazo RobotDokument22 SeitenProtocolo Brazo RobotJose Luis EsquivelNoch keine Bewertungen
- Reporte de RoboticaDokument14 SeitenReporte de RoboticaGonzalez JoonyNoch keine Bewertungen
- Sistemas de Puesta A TierraDokument6 SeitenSistemas de Puesta A TierraSergio Terceros Santa Cruz100% (1)
- Mantenimiento de Motores EléctricosDokument31 SeitenMantenimiento de Motores EléctricosSergio Terceros Santa Cruz100% (3)
- 1 Presentacion Correas 1Dokument53 Seiten1 Presentacion Correas 1Sergio Terceros Santa CruzNoch keine Bewertungen
- 02 Evolución de MantenimientoDokument5 Seiten02 Evolución de MantenimientoJorge AntezanaNoch keine Bewertungen
- Diseño de Máquinas y Sus FallasDokument20 SeitenDiseño de Máquinas y Sus FallasSergio Terceros Santa CruzNoch keine Bewertungen
- Cómo Apantallar Una Guitarra EléctricaDokument14 SeitenCómo Apantallar Una Guitarra EléctricaSergio Terceros Santa CruzNoch keine Bewertungen
- Alfa CentauriDokument4 SeitenAlfa CentauriSeleneHesslingNoch keine Bewertungen
- El Benceno y Sus Derivados 3Dokument14 SeitenEl Benceno y Sus Derivados 3Jose Wilson Cuesta CordobaNoch keine Bewertungen
- CATALOGODokument17 SeitenCATALOGOjhonct100% (1)
- Examen Final - Semana 8 - CB - SEGUNDO BLOQUE-MATEMATICAS II - (GRUPO2)Dokument8 SeitenExamen Final - Semana 8 - CB - SEGUNDO BLOQUE-MATEMATICAS II - (GRUPO2)claudia0lara-30% (1)
- Prac. 4 Condensación de Claisen SchmidtDokument14 SeitenPrac. 4 Condensación de Claisen SchmidtFran Castrejon Pilgrim100% (1)
- Estudio de Caso 2 Probabilidad UnadDokument3 SeitenEstudio de Caso 2 Probabilidad UnadJuan Carlos Restrepo SalcedoNoch keine Bewertungen
- Prueba de MatematicaDokument13 SeitenPrueba de MatematicajanierNoch keine Bewertungen
- Tem 6 Clase 3 PDFDokument39 SeitenTem 6 Clase 3 PDFLau Montes0% (1)
- Trabajo Final de VigasDokument6 SeitenTrabajo Final de VigasClara Pocco Gala100% (1)
- Cartas de Control para AtributosDokument90 SeitenCartas de Control para AtributosDanf SuarezNoch keine Bewertungen
- Proceso Del PlomoDokument5 SeitenProceso Del PlomoDavid Arthur Quino CoveñasNoch keine Bewertungen
- EHVH X11-16CB ERLQ011-016CA ERHQ011-016BA Installer Reference Guide 4PES384975-1 Installation Manuals SpanishDokument12 SeitenEHVH X11-16CB ERLQ011-016CA ERHQ011-016BA Installer Reference Guide 4PES384975-1 Installation Manuals SpanishDeyan VelikovNoch keine Bewertungen
- Odontologia - Ventajas y Desventajas de Las Incrustaciones Esteticas y MetalicasDokument10 SeitenOdontologia - Ventajas y Desventajas de Las Incrustaciones Esteticas y MetalicasEdward SáenzNoch keine Bewertungen
- Marco TeoricoDokument3 SeitenMarco TeoricoCesiaQuispeAranaNoch keine Bewertungen
- Funcionamiento Del Circuito de Aire AcondicionadoDokument3 SeitenFuncionamiento Del Circuito de Aire AcondicionadoEUDIS HERNANDEZ100% (48)
- Técnicas de Extracción de La ClorofilaDokument10 SeitenTécnicas de Extracción de La ClorofilaMit TorresNoch keine Bewertungen
- Movimiento Rectilíneo Uniforme y Uniformemente VariadoDokument27 SeitenMovimiento Rectilíneo Uniforme y Uniformemente Variadodavid romeoNoch keine Bewertungen
- Class Pad 2Dokument7 SeitenClass Pad 2fiorelillaRRNoch keine Bewertungen
- Cadenas markovNPJ PDFDokument33 SeitenCadenas markovNPJ PDFOchoa VictorNoch keine Bewertungen
- Laboratorio TyndallDokument8 SeitenLaboratorio TyndallAndrea Fernanda Cisternas MoyaNoch keine Bewertungen
- Manual Tensiometrold578Dokument7 SeitenManual Tensiometrold578David ArteagaNoch keine Bewertungen
- Clase16 Marzo Ejemplo 3 4 4Dokument14 SeitenClase16 Marzo Ejemplo 3 4 4Pedro Leon Garcia ReinosoNoch keine Bewertungen
- WiMMed - 1.0 Base TeoricaDokument45 SeitenWiMMed - 1.0 Base TeoricaanandreumNoch keine Bewertungen
- Actividad de Aprendizaje 3. Modelos LinealesDokument6 SeitenActividad de Aprendizaje 3. Modelos Linealesangelica cruz perez100% (2)
- CATALISISDokument12 SeitenCATALISISeduanllNoch keine Bewertungen
- Procedimiento AFDokument18 SeitenProcedimiento AFCarlos TijerinaNoch keine Bewertungen
- Ejercicios Tipo ICFES - QuímicaDokument3 SeitenEjercicios Tipo ICFES - QuímicaJorge OrtegaNoch keine Bewertungen
- Alimentador de Placas PDFDokument13 SeitenAlimentador de Placas PDFAnita Fernandez C.Noch keine Bewertungen