Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Color Order SystemsDokument30 SeitenColor Order SystemsBeyene DumechaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- PM Master Data Template v1Dokument72 SeitenPM Master Data Template v1Naseer SultanNoch keine Bewertungen
- Silo Cement CalculationDokument11 SeitenSilo Cement CalculationFikriaraz AfifNoch keine Bewertungen
- Xenomai 3 DocumentationDokument673 SeitenXenomai 3 DocumentationGuile BonafiniNoch keine Bewertungen
- AutoCAD Mechanical 2015 Overview Brochure - A4Dokument4 SeitenAutoCAD Mechanical 2015 Overview Brochure - A4Raul ReynosoNoch keine Bewertungen
- Delphi 9322a000Dokument5 SeitenDelphi 9322a000BaytolgaNoch keine Bewertungen
- Nādatanumanisham Shankaram Namami Me Manasa ShirasaDokument12 SeitenNādatanumanisham Shankaram Namami Me Manasa Shirasaveena murthyNoch keine Bewertungen
- LTE and SchedulingDokument25 SeitenLTE and SchedulingKrunoslav IvesicNoch keine Bewertungen
- Operational Guidelines For VlsfoDokument2 SeitenOperational Guidelines For VlsfoИгорьNoch keine Bewertungen
- Measures of Chaos in Hamiltonian SystemsDokument6 SeitenMeasures of Chaos in Hamiltonian SystemsMainak ChatterjeeNoch keine Bewertungen
- Ch7 Asm SE-nptelDokument26 SeitenCh7 Asm SE-nptelMainak ChatterjeeNoch keine Bewertungen
- Perturbation and KAM TheoryDokument5 SeitenPerturbation and KAM TheoryMainak ChatterjeeNoch keine Bewertungen
- Predicting the Future of the Solar System Through Chaos Theory and Nonlinear DynamicsDokument58 SeitenPredicting the Future of the Solar System Through Chaos Theory and Nonlinear DynamicsMainak ChatterjeeNoch keine Bewertungen
- MAT 119A Final NotesDokument8 SeitenMAT 119A Final NotesMainak ChatterjeeNoch keine Bewertungen
- Logistic Map SolnDokument6 SeitenLogistic Map SolnMainak ChatterjeeNoch keine Bewertungen
- Hamiltonian Chaos 2Dokument12 SeitenHamiltonian Chaos 2Mainak ChatterjeeNoch keine Bewertungen
- Solutions To Homework Assignment 1: 36-462 January 2009Dokument12 SeitenSolutions To Homework Assignment 1: 36-462 January 2009Mainak ChatterjeeNoch keine Bewertungen
- Logistic MapDokument62 SeitenLogistic MapMainak ChatterjeeNoch keine Bewertungen
- Hamiltonian Perturbation Theory (And Transition To Chaos) 4515Dokument26 SeitenHamiltonian Perturbation Theory (And Transition To Chaos) 4515Mainak ChatterjeeNoch keine Bewertungen
- Hamiltonian Chaos: Indrajit Mondal Ratan Sarkar Koyel DasDokument6 SeitenHamiltonian Chaos: Indrajit Mondal Ratan Sarkar Koyel DasMainak ChatterjeeNoch keine Bewertungen
- E209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionsDokument13 SeitenE209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionstetrixNoch keine Bewertungen
- HamiltonianChaosLos AlamosDokument5 SeitenHamiltonianChaosLos AlamosMainak ChatterjeeNoch keine Bewertungen
- Hamiltonian Systems - ScholarpediaDokument12 SeitenHamiltonian Systems - ScholarpediaMainak ChatterjeeNoch keine Bewertungen
- Hamiltonian ChaosDokument17 SeitenHamiltonian ChaosMainak ChatterjeeNoch keine Bewertungen
- Hamiltonian Chaos 2Dokument12 SeitenHamiltonian Chaos 2Mainak ChatterjeeNoch keine Bewertungen
- Homework 7.1 Solutions Math 5110/6830Dokument8 SeitenHomework 7.1 Solutions Math 5110/6830Mainak ChatterjeeNoch keine Bewertungen
- Hamiltonian ChaosDokument6 SeitenHamiltonian ChaosMainak ChatterjeeNoch keine Bewertungen
- Bifurcation 3Dokument7 SeitenBifurcation 3Mainak ChatterjeeNoch keine Bewertungen
- 6.9. The KAM Theorem and The Route To Hamiltonian ChaosDokument4 Seiten6.9. The KAM Theorem and The Route To Hamiltonian ChaosMainak ChatterjeeNoch keine Bewertungen
- The Dynamics of Pendula: An Introduction To Hamiltonian Systems and ChaosDokument18 SeitenThe Dynamics of Pendula: An Introduction To Hamiltonian Systems and ChaosMohamad SafiNoch keine Bewertungen
- Non-Linear Dynamics Homework Solutions Week 2: Chris Small March 5, 2007Dokument9 SeitenNon-Linear Dynamics Homework Solutions Week 2: Chris Small March 5, 2007Mainak ChatterjeeNoch keine Bewertungen
- Bifurcation 2Dokument11 SeitenBifurcation 2Mainak ChatterjeeNoch keine Bewertungen
- Product - 20V4000G24F 3B FODokument32 SeitenProduct - 20V4000G24F 3B FOmohammed khadrNoch keine Bewertungen
- SUBstation Equipmens TLDokument12 SeitenSUBstation Equipmens TLJecer Casipong NuruddinNoch keine Bewertungen
- Ce010 601 Design of Steel Structures Ce PDFDokument5 SeitenCe010 601 Design of Steel Structures Ce PDFPrakash rubanNoch keine Bewertungen
- Hydrogen and Its Compound.1Dokument10 SeitenHydrogen and Its Compound.1abhishekNoch keine Bewertungen
- MTech Information Security FINAL 10052018Dokument20 SeitenMTech Information Security FINAL 10052018sirisha vNoch keine Bewertungen
- Mathematics of Finance: Simple and Compound Interest FormulasDokument11 SeitenMathematics of Finance: Simple and Compound Interest FormulasAshekin MahadiNoch keine Bewertungen
- Seksioni I Kabllos Per Rrymat e Lidhjes Se ShkurteDokument1 SeiteSeksioni I Kabllos Per Rrymat e Lidhjes Se ShkurteDukagjin Ramqaj100% (1)
- Efficiency Evaluation of The Ejector Cooling Cycle PDFDokument18 SeitenEfficiency Evaluation of The Ejector Cooling Cycle PDFzoom_999Noch keine Bewertungen
- Apriori AlgorithmDokument13 SeitenApriori AlgorithmKiran JoshiNoch keine Bewertungen
- Pumps - IntroductionDokument31 SeitenPumps - IntroductionSuresh Thangarajan100% (1)
- Die Science - Developing Forming Dies - Part I - The FabricatorDokument6 SeitenDie Science - Developing Forming Dies - Part I - The FabricatorSIMONENoch keine Bewertungen
- Recommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Dokument38 SeitenRecommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Crismaruc Maria-madalinaNoch keine Bewertungen
- SERVICE MANUAL CRAWLER EXCAVATOR R210LC-7Dokument1 SeiteSERVICE MANUAL CRAWLER EXCAVATOR R210LC-7DmitryNoch keine Bewertungen
- Front Panel & Display Technical Data: User ManualDokument2 SeitenFront Panel & Display Technical Data: User ManualJulio PorleyNoch keine Bewertungen
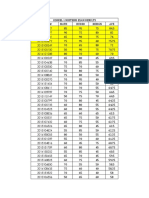
- Midterm Exam Result Ce199-1l 2Q1920Dokument3 SeitenMidterm Exam Result Ce199-1l 2Q1920RA CarpioNoch keine Bewertungen
- ASP Flashcards - QuizletDokument36 SeitenASP Flashcards - QuizletRehman MuzaffarNoch keine Bewertungen
- San Unit-Wise QuestionsDokument6 SeitenSan Unit-Wise QuestionsSushmitha KodupakaNoch keine Bewertungen
- Ze500 4 Parts Catalog en UsDokument9 SeitenZe500 4 Parts Catalog en UsClaudia LopezNoch keine Bewertungen
- AND Optimization OF Three Existing Ethylbenzene Dehydrogenation Reactors in SeriesDokument5 SeitenAND Optimization OF Three Existing Ethylbenzene Dehydrogenation Reactors in SeriesMuhammad Ridwan TanjungNoch keine Bewertungen
- Delta VFD E Series User ManualDokument399 SeitenDelta VFD E Series User ManualTendai AlfaceNoch keine Bewertungen
- Nso User Guide-5.3 PDFDokument178 SeitenNso User Guide-5.3 PDFAla JebnounNoch keine Bewertungen