Das könnte Ihnen auch gefallen
- Dampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. DenmarkDokument16 SeitenDampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. Denmarkmuhammed mundhir100% (1)
- Vibration of Single Degree of Freedom SystemDokument31 SeitenVibration of Single Degree of Freedom SystemEnriqueGDNoch keine Bewertungen
- Modal AnalysisDokument23 SeitenModal AnalysisalecavanoNoch keine Bewertungen
- Modal AnalysisDokument26 SeitenModal AnalysisTrinh Duy TanNoch keine Bewertungen
- FM-2 Lecture 1 FinalDokument27 SeitenFM-2 Lecture 1 FinalAhmed KhanNoch keine Bewertungen
- Understanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. SnyderDokument10 SeitenUnderstanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. Snydermohamedabbas_us3813Noch keine Bewertungen
- Free Vibration Natural Frequencies and Mode Shapes PDFDokument15 SeitenFree Vibration Natural Frequencies and Mode Shapes PDFkiran2381Noch keine Bewertungen
- New method analyzes rock slope stability under blastingDokument8 SeitenNew method analyzes rock slope stability under blastingbentonoise7Noch keine Bewertungen
- VibrationDokument9 SeitenVibrationDouglas HillNoch keine Bewertungen
- Bridge DyanmicDokument176 SeitenBridge DyanmicDebaraj BailungNoch keine Bewertungen
- Finite Element Modeling of Mat FoundationsDokument7 SeitenFinite Element Modeling of Mat FoundationsAhmed Al-Amri100% (1)
- Faraday Rings Voice Coil ImpedanceDokument37 SeitenFaraday Rings Voice Coil ImpedanceMatthew MillerNoch keine Bewertungen
- Homework2 PDFDokument2 SeitenHomework2 PDFRobin Robertson100% (1)
- Weld Stress Calculations GuideDokument9 SeitenWeld Stress Calculations GuideAbsec PandaNoch keine Bewertungen
- Modal Analysis of MDOF Forced Undamped SystemsDokument11 SeitenModal Analysis of MDOF Forced Undamped Systems王轩Noch keine Bewertungen
- Dynamic Analysis of Large-Diameter Sagged PDFDokument19 SeitenDynamic Analysis of Large-Diameter Sagged PDFKedarNoch keine Bewertungen
- Num Int 2 DDokument28 SeitenNum Int 2 DTornadoNoch keine Bewertungen
- MMPD Advance MathematicsDokument45 SeitenMMPD Advance Mathematicsmayuresh_6767Noch keine Bewertungen
- STR Des PP Lec1Dokument48 SeitenSTR Des PP Lec1esmailNoch keine Bewertungen
- Lec 33Dokument13 SeitenLec 33sknlndsaNoch keine Bewertungen
- Topic 3 (Fema) SdofDokument217 SeitenTopic 3 (Fema) SdofBenedictus CaturNoch keine Bewertungen
- LysmerDokument147 SeitenLysmerHans OlmosNoch keine Bewertungen
- Quick look at vector operations in Mechanical APDLDokument29 SeitenQuick look at vector operations in Mechanical APDLhazemismaeelradhi100% (1)
- A Study On Crack Detection Using Eigenfrequency Test DataDokument16 SeitenA Study On Crack Detection Using Eigenfrequency Test Data王轩Noch keine Bewertungen
- Frequency of Free Damped Vibrations (Viscous Damping)Dokument8 SeitenFrequency of Free Damped Vibrations (Viscous Damping)ذوالفقار علي حسينNoch keine Bewertungen
- Effect of Soil Structure Interaction On Gravity DamDokument10 SeitenEffect of Soil Structure Interaction On Gravity DamAnonymous D5s00DdUNoch keine Bewertungen
- Module 6 Structure DynamicsDokument64 SeitenModule 6 Structure DynamicswajidNoch keine Bewertungen
- Structural Degrees of FreedomDokument24 SeitenStructural Degrees of FreedomJibrilNoch keine Bewertungen
- 343 381 Mil STD 810HDokument41 Seiten343 381 Mil STD 810HMemduh DenizNoch keine Bewertungen
- Heat Chap05 043Dokument28 SeitenHeat Chap05 043Kerem GönceNoch keine Bewertungen
- WiseTex Overview PDFDokument34 SeitenWiseTex Overview PDFГЕННАДИЙ МИХАЙЛОВИЧ РЕЗНИЧЕНКОNoch keine Bewertungen
- Analysis and Comparison On Dynamic Characteristics of The BridgeDokument10 SeitenAnalysis and Comparison On Dynamic Characteristics of The BridgejayaramanrathnamNoch keine Bewertungen
- Wind-Excited VibrationsDokument12 SeitenWind-Excited VibrationsGuilherme SalesNoch keine Bewertungen
- Shear Failure of Bolted Joints Lab ReportDokument1 SeiteShear Failure of Bolted Joints Lab Reportboo huNoch keine Bewertungen
- Design of A Large Shaft With The Finite Element MethodDokument1 SeiteDesign of A Large Shaft With The Finite Element MethodrceajcNoch keine Bewertungen
- Prof. Niguse Tebedge PHD PaperDokument186 SeitenProf. Niguse Tebedge PHD PaperSamuel Tesfaye50% (2)
- Structural Analysis of Cantilever Beam in ANSYSDokument55 SeitenStructural Analysis of Cantilever Beam in ANSYSkrishna8808100% (2)
- (EXTRACT) Etabs Analysis Reference v18 - Friction Pendulum - Single, Double & TripleDokument13 Seiten(EXTRACT) Etabs Analysis Reference v18 - Friction Pendulum - Single, Double & TripleO SNoch keine Bewertungen
- Shear LagDokument13 SeitenShear LagMhnd Al-SherrawiNoch keine Bewertungen
- Release Note: July 2015Dokument21 SeitenRelease Note: July 2015Puma MoiNoch keine Bewertungen
- P-M interaction check wall capacity comparisonDokument5 SeitenP-M interaction check wall capacity comparisonVILCA100% (2)
- Nonlinear Finite Element Analysis of An RC FrameDokument12 SeitenNonlinear Finite Element Analysis of An RC Framearash250100% (1)
- A Simplified Design Method For Metallic Dampers Used in The Transverse Direction of Cable-Stayed BridgesDokument15 SeitenA Simplified Design Method For Metallic Dampers Used in The Transverse Direction of Cable-Stayed Bridgeskaurmanjinder325Noch keine Bewertungen
- Free Vibration of SDF SystemsDokument14 SeitenFree Vibration of SDF Systemspattrapong pongpattraNoch keine Bewertungen
- Bridge Deck Analysis Through The Use of Grill Age ModelsDokument8 SeitenBridge Deck Analysis Through The Use of Grill Age ModelsOmer Aguilar LunarejoNoch keine Bewertungen
- CE 312 Structural Analysis and Design Sessional-I (Lab Manual)Dokument73 SeitenCE 312 Structural Analysis and Design Sessional-I (Lab Manual)julesNoch keine Bewertungen
- Excellent Thesis On Damping Measurements PDFDokument283 SeitenExcellent Thesis On Damping Measurements PDFconcord1103Noch keine Bewertungen
- Tuned Mass Damper Week 4Dokument11 SeitenTuned Mass Damper Week 4Nisa NajwaNoch keine Bewertungen
- Innovation in instrumented test piles using global strain extensometersDokument6 SeitenInnovation in instrumented test piles using global strain extensometersG-SamNoch keine Bewertungen
- 180 Toe Resistance From CPT AnalysisDokument8 Seiten180 Toe Resistance From CPT AnalysisRifky NetriadyNoch keine Bewertungen
- Advanced Structural Analysis PDFDokument13 SeitenAdvanced Structural Analysis PDFkyleNoch keine Bewertungen
- Comandi Ansys APDLDokument51 SeitenComandi Ansys APDLRiccardinoFuffoloNoch keine Bewertungen
- Formula Sheet UpdatedDokument10 SeitenFormula Sheet UpdatedSania BatoolNoch keine Bewertungen
- Bernt - EC3 1 5Dokument44 SeitenBernt - EC3 1 5Rosario BlancaNoch keine Bewertungen
- Ch3 Contact StiffnessDokument16 SeitenCh3 Contact Stiffnessanilmavi100% (1)
- Structural Health MonitoringVon EverandStructural Health MonitoringDaniel BalageasNoch keine Bewertungen
- Response Spectrum Analysis PDFDokument30 SeitenResponse Spectrum Analysis PDFSujay SantraNoch keine Bewertungen
- Kuliah-5 Response Spectrum + Zona GempaDokument92 SeitenKuliah-5 Response Spectrum + Zona GempaJimmy DonNoch keine Bewertungen
- Manolis KoliopoulosDokument58 SeitenManolis KoliopoulosSushil MundelNoch keine Bewertungen
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsVon EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNoch keine Bewertungen
- Retaining WallDokument1 SeiteRetaining WallRonnie1478Noch keine Bewertungen
- ASCEDesign Hazards ReportDokument3 SeitenASCEDesign Hazards ReportRonnie1478Noch keine Bewertungen
- Sgebste1 21Dokument3 SeitenSgebste1 21Ronnie1478Noch keine Bewertungen
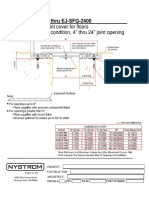
- Nystrom EJS SFG-400-2400 SHPDRDokument1 SeiteNystrom EJS SFG-400-2400 SHPDRRonnie1478Noch keine Bewertungen
- 2020 AISI Profile BookDokument28 Seiten2020 AISI Profile BookRonnie1478Noch keine Bewertungen
- Pages From ASCE 7-05 Minimum Design Loads For Buildings and Other StrucDokument3 SeitenPages From ASCE 7-05 Minimum Design Loads For Buildings and Other StrucRonnie1478Noch keine Bewertungen
- Rebar 5Dokument1 SeiteRebar 5Ronnie1478Noch keine Bewertungen
- Nystrom Expansion Joint System CatalogDokument48 SeitenNystrom Expansion Joint System CatalogRonnie1478Noch keine Bewertungen
- Rebar 2Dokument1 SeiteRebar 2Ronnie1478Noch keine Bewertungen
- Csidetail User Csidetail: Client Project Designed NADokument1 SeiteCsidetail User Csidetail: Client Project Designed NARonnie1478Noch keine Bewertungen
- Concrete Beam Rebar TableDokument1 SeiteConcrete Beam Rebar TableRonnie1478Noch keine Bewertungen
- Topic15 2 PerformanceBasedEngineeringNotesDokument100 SeitenTopic15 2 PerformanceBasedEngineeringNotestrabajosicNoch keine Bewertungen
- Krishtalevich AlexeyDokument128 SeitenKrishtalevich AlexeyKiran Kumar KondapalliNoch keine Bewertungen
- 04 - Concrete and Sustainable DevelopmentDokument8 Seiten04 - Concrete and Sustainable DevelopmentFahid AslamNoch keine Bewertungen
- 2020 AISI Profile BookDokument28 Seiten2020 AISI Profile BookRonnie1478Noch keine Bewertungen
- Pole and Pier FoundationDokument38 SeitenPole and Pier FoundationNalaka SanthajeewaNoch keine Bewertungen
- DEWALT Technical Manual PDFDokument388 SeitenDEWALT Technical Manual PDFRonnie1478100% (1)
- Powers Design Assist Real-Time Anchor Design Software V2.0 Free Download atDokument16 SeitenPowers Design Assist Real-Time Anchor Design Software V2.0 Free Download atRonnie1478Noch keine Bewertungen
- Diseño de Conexiones PCIDokument102 SeitenDiseño de Conexiones PCIj-balderasNoch keine Bewertungen
- Aashto08 PDFDokument218 SeitenAashto08 PDFJunior VeraNoch keine Bewertungen
- ETABS Tutorial: Analyzing and Designing a G+10 BuildingDokument81 SeitenETABS Tutorial: Analyzing and Designing a G+10 BuildingJwanro Hawramy0% (1)
- Design of Reinforced Concrete Deep Beams PDFDokument5 SeitenDesign of Reinforced Concrete Deep Beams PDFRonnie1478Noch keine Bewertungen
- Lesson4 CustomComponents Precast PDFDokument28 SeitenLesson4 CustomComponents Precast PDFKadutrisampaNoch keine Bewertungen
- TABLE R301.7 Allowable Deflection of Structural MembersDokument2 SeitenTABLE R301.7 Allowable Deflection of Structural MembersovunctezerNoch keine Bewertungen
- Lewis Sign Technical PlanDokument1 SeiteLewis Sign Technical PlanRonnie1478Noch keine Bewertungen
- 2016 SP CD Soils and Foundations 2 Slide PDFDokument60 Seiten2016 SP CD Soils and Foundations 2 Slide PDFRonnie1478Noch keine Bewertungen
- Lewis Sign TechDokument1 SeiteLewis Sign TechRonnie1478Noch keine Bewertungen
- Foundation Design Field Investigation RequirementsDokument20 SeitenFoundation Design Field Investigation RequirementsJack TaylorNoch keine Bewertungen
- Geotechnical Design Manual: Technical Services Branch Geo-Environmental SectionDokument95 SeitenGeotechnical Design Manual: Technical Services Branch Geo-Environmental SectionRonnie1478Noch keine Bewertungen
- 17502-Drawing Template PDFDokument6 Seiten17502-Drawing Template PDFveerash100Noch keine Bewertungen
- Final InternshipDokument64 SeitenFinal Internshippradeep100% (2)
- Communication Process Quiz AnswersDokument3 SeitenCommunication Process Quiz AnswersAbigail CullaNoch keine Bewertungen
- Lydia HallDokument2 SeitenLydia HallAshley Nicole BeltranNoch keine Bewertungen
- Graduation SpeechesDokument9 SeitenGraduation SpeechesSeun IsraelNoch keine Bewertungen
- Understanding Culture, Society and PoliticsDokument71 SeitenUnderstanding Culture, Society and PoliticsAl Cheeno AnonuevoNoch keine Bewertungen
- Lipid Extraction & IdentificationDokument19 SeitenLipid Extraction & IdentificationAldwin Ray Pamplona100% (2)
- Annotated BibliographyDokument7 SeitenAnnotated Bibliographyapi-212250493100% (1)
- LVMPD Use of Force PolicyDokument26 SeitenLVMPD Use of Force PolicyFOX5 VegasNoch keine Bewertungen
- 5-Qualities-of-a-Successful-Illustrator 2Dokument42 Seiten5-Qualities-of-a-Successful-Illustrator 2Jorge MendozaNoch keine Bewertungen
- Analogy and LogicDokument2 SeitenAnalogy and LogicCOMELEC CARNoch keine Bewertungen
- Fundamentals of Surveying by S.K. RoyDokument613 SeitenFundamentals of Surveying by S.K. RoyChalamaiah Vadlamudi100% (1)
- The Rolle of Surgery in Oncology: Surgery Departement Medical Faculty Ukrida UniversityDokument25 SeitenThe Rolle of Surgery in Oncology: Surgery Departement Medical Faculty Ukrida UniversityGian Alodia RisamasuNoch keine Bewertungen
- I. Objectives: Checking of AttendanceDokument4 SeitenI. Objectives: Checking of AttendanceJoAnn MacalingaNoch keine Bewertungen
- Module 6 - El FilibusterismoDokument4 SeitenModule 6 - El FilibusterismoSilver GoldNoch keine Bewertungen
- Dilkeswar PDFDokument21 SeitenDilkeswar PDFDilkeshwar PandeyNoch keine Bewertungen
- Interactive Textbook1 1whatis MatterDokument7 SeitenInteractive Textbook1 1whatis Matterapi-240094705Noch keine Bewertungen
- Control System Question BankDokument3 SeitenControl System Question Bankmanish_iitrNoch keine Bewertungen
- Informatics ProjectDokument9 SeitenInformatics Projectapi-480981439Noch keine Bewertungen
- Sea Control & Sea DenialDokument7 SeitenSea Control & Sea DenialHeri OktavianNoch keine Bewertungen
- The Explicator: To Cite This Article: Sunjoo Lee (2014) To Be Shocked To Life Again: Ray Bradbury's FAHRENHEIT 451Dokument5 SeitenThe Explicator: To Cite This Article: Sunjoo Lee (2014) To Be Shocked To Life Again: Ray Bradbury's FAHRENHEIT 451Denisa NedelcuNoch keine Bewertungen
- Information Technology (Code No. 402) CLASS IX (SESSION 2019-2020)Dokument1 SeiteInformation Technology (Code No. 402) CLASS IX (SESSION 2019-2020)Debi Prasad SinhaNoch keine Bewertungen
- Aug. 16, 2019 - Friday Aug. 16, 2019 - FridayDokument3 SeitenAug. 16, 2019 - Friday Aug. 16, 2019 - FridayYssh GozumNoch keine Bewertungen
- Social Emotional Lesson Plan 1Dokument6 SeitenSocial Emotional Lesson Plan 1api-282229828Noch keine Bewertungen
- SecondaryDokument51 SeitenSecondarysnowden150% (2)
- Camarines NorteDokument48 SeitenCamarines NorteJohn Rei CabunasNoch keine Bewertungen
- Task 2 AmberjordanDokument15 SeitenTask 2 Amberjordanapi-200086677100% (2)
- Ipw - Proposal To OrganizationDokument3 SeitenIpw - Proposal To Organizationapi-346139339Noch keine Bewertungen
- ScienceDokument112 SeitenScienceAnkit JainNoch keine Bewertungen
- BOSS OS SeminarDokument23 SeitenBOSS OS Seminarparam tube100% (1)
- Merged Fa Cwa NotesDokument799 SeitenMerged Fa Cwa NotesAkash VaidNoch keine Bewertungen