Das könnte Ihnen auch gefallen
- Water System - BoilersDokument102 SeitenWater System - BoilersrajkrangaNoch keine Bewertungen
- Guia de Usuario Omega Hx15Dokument12 SeitenGuia de Usuario Omega Hx15microsoda8Noch keine Bewertungen
- Fluid Bed ManualDokument24 SeitenFluid Bed ManualrajkrangaNoch keine Bewertungen
- Mixture Investigated For Azeotropes at A Pressure of 1.01325 BARDokument1 SeiteMixture Investigated For Azeotropes at A Pressure of 1.01325 BARrajkrangaNoch keine Bewertungen
- Viscosity Experiment: Nada Surf - Jemal Fondel, Blake Miller, Steven Smelley & Krishane SureshDokument7 SeitenViscosity Experiment: Nada Surf - Jemal Fondel, Blake Miller, Steven Smelley & Krishane SureshrajkrangaNoch keine Bewertungen
- Tech Brief 2013 - Reading Centrifugal Pump Curves PDFDokument5 SeitenTech Brief 2013 - Reading Centrifugal Pump Curves PDFFawaaz KhurwolahNoch keine Bewertungen
- Minimum Report Requirements For Batch ExperimentDokument1 SeiteMinimum Report Requirements For Batch ExperimentrajkrangaNoch keine Bewertungen
- La Crosse Anemometer ManualDokument2 SeitenLa Crosse Anemometer Manuald_vikram86Noch keine Bewertungen
- Batch Reaction SOPs-1Dokument6 SeitenBatch Reaction SOPs-1rajkrangaNoch keine Bewertungen
- Physical Chemistry HomeworkDokument5 SeitenPhysical Chemistry HomeworkrajkrangaNoch keine Bewertungen
- Mixture Investigated For Azeotropes at A Pressure of 1.01325 BARDokument1 SeiteMixture Investigated For Azeotropes at A Pressure of 1.01325 BARrajkrangaNoch keine Bewertungen
- Physical properties data tables and referencesDokument32 SeitenPhysical properties data tables and referencesmidooooo198767% (3)
- College Student Siblings Confidence IntervalDokument1 SeiteCollege Student Siblings Confidence IntervalrajkrangaNoch keine Bewertungen
- Bernoulli and Torricelli Theorem Basics.Dokument49 SeitenBernoulli and Torricelli Theorem Basics.shubhamcholeNoch keine Bewertungen
- Bernoulli and Torricelli Theorem Basics.Dokument49 SeitenBernoulli and Torricelli Theorem Basics.shubhamcholeNoch keine Bewertungen
- Tech Brief 2013 - Reading Centrifugal Pump Curves PDFDokument5 SeitenTech Brief 2013 - Reading Centrifugal Pump Curves PDFFawaaz KhurwolahNoch keine Bewertungen
- Business Ethics ReviewDokument8 SeitenBusiness Ethics Reviewrajkranga100% (1)
- Summer3aa0 PDFDokument14 SeitenSummer3aa0 PDFrajkrangaNoch keine Bewertungen
- And Thermal Conductivity and Uses The VBA Functions For Those PropertiesDokument6 SeitenAnd Thermal Conductivity and Uses The VBA Functions For Those PropertiesrajkrangaNoch keine Bewertungen
- Heat Transfer CoefficientDokument40 SeitenHeat Transfer CoefficientrajkrangaNoch keine Bewertungen
- CH 1Dokument19 SeitenCH 1rajkrangaNoch keine Bewertungen
- Matlab Euler CodeDokument1 SeiteMatlab Euler CoderajkrangaNoch keine Bewertungen
- 01 Basic Concept of Process ControlDokument24 Seiten01 Basic Concept of Process ControlrajkrangaNoch keine Bewertungen
- Heat Transfer CoefficientDokument40 SeitenHeat Transfer CoefficientrajkrangaNoch keine Bewertungen
- 01 Basic Concept of Process ControlDokument24 Seiten01 Basic Concept of Process ControlrajkrangaNoch keine Bewertungen
- O13 024 Sparc t5 Architecture 1920540Dokument45 SeitenO13 024 Sparc t5 Architecture 1920540rajkrangaNoch keine Bewertungen
- CH 1Dokument19 SeitenCH 1rajkrangaNoch keine Bewertungen
- IECA Antonoff Resources ListDokument5 SeitenIECA Antonoff Resources ListrajkrangaNoch keine Bewertungen
- Unit Operations of Chemical Engineering McCabe 11-3Dokument2 SeitenUnit Operations of Chemical Engineering McCabe 11-3rajkranga0% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Chemistry Paper 8 Module 34: Excited States and Emission ProcessesDokument9 SeitenChemistry Paper 8 Module 34: Excited States and Emission ProcessesSriNoch keine Bewertungen
- Unit 2Dokument3 SeitenUnit 2V V Satyanarayana PasupuletiNoch keine Bewertungen
- BiomagnetismDokument30 SeitenBiomagnetismapi-19937584100% (4)
- Transmission LinesDokument23 SeitenTransmission Linesravi010582Noch keine Bewertungen
- SF6 Circuit Breakers AdvantagesDokument4 SeitenSF6 Circuit Breakers Advantagessekhar_ntpcNoch keine Bewertungen
- Heating and CoolingDokument45 SeitenHeating and CoolingGillianne AndradeNoch keine Bewertungen
- Response Spectrum Analysis Using Femap and NX NastranDokument40 SeitenResponse Spectrum Analysis Using Femap and NX NastranGana C Rover100% (1)
- The Old Hats Problem: Heba Hathout, Westridge School For Girls Pasadena, CADokument11 SeitenThe Old Hats Problem: Heba Hathout, Westridge School For Girls Pasadena, CAsudhir_kumar_33Noch keine Bewertungen
- Candy Veš M.model Cj433tDokument19 SeitenCandy Veš M.model Cj433tpedjavaljarevicNoch keine Bewertungen
- Nuclear Engineering Question BankDokument5 SeitenNuclear Engineering Question Bankaerochandru.87Noch keine Bewertungen
- AC Circuit Problems and SolutionsDokument4 SeitenAC Circuit Problems and SolutionsGarlapati Srinivasa RaoNoch keine Bewertungen
- Zhang2014.Numerical Investigation On Factors For Deep-Seated Slope Stability of StoneDokument10 SeitenZhang2014.Numerical Investigation On Factors For Deep-Seated Slope Stability of Stonejose monteNoch keine Bewertungen
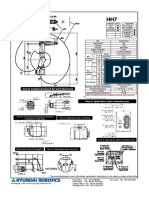
- Hh7 CatalogDokument1 SeiteHh7 Catalogjitender kumarNoch keine Bewertungen
- Searching / FoundDokument252 SeitenSearching / FoundCBTNoch keine Bewertungen
- Vacuum, General Relativity: PHY100 The Nature of The Physical WorldDokument21 SeitenVacuum, General Relativity: PHY100 The Nature of The Physical WorldJacecosmozNoch keine Bewertungen
- IrDokument13 SeitenIrumesh123patilNoch keine Bewertungen
- 12.elastic ConstantsDokument18 Seiten12.elastic ConstantsaderancNoch keine Bewertungen
- LIFE 110B: Lecture 9 - (A) Introduction To Transport in Biological Systems (B) Mass Transport and Heat TransportDokument44 SeitenLIFE 110B: Lecture 9 - (A) Introduction To Transport in Biological Systems (B) Mass Transport and Heat TransportNella Ramsarran100% (2)
- Lewis Structures: Molecular Structure and BondingDokument83 SeitenLewis Structures: Molecular Structure and Bondingحني اسفيانيNoch keine Bewertungen
- Rotary Drum SpecsDokument16 SeitenRotary Drum SpecsArrianne Jaye MataNoch keine Bewertungen
- Classical Dynamics: Example Sheet 3 SolvedDokument3 SeitenClassical Dynamics: Example Sheet 3 SolvedShweta SridharNoch keine Bewertungen
- Universe in Nutshell Hawking ReviewDokument3 SeitenUniverse in Nutshell Hawking ReviewVladica Barjaktarovic100% (1)
- Energy Transfer in Electrical CircuitsDokument5 SeitenEnergy Transfer in Electrical CircuitsAnyrchiveNoch keine Bewertungen
- Heat exchanger specification sheetDokument2 SeitenHeat exchanger specification sheetDycka Anugerah PuryantoroNoch keine Bewertungen
- Power System Lab021-1Dokument10 SeitenPower System Lab021-1Montosh RoyNoch keine Bewertungen
- MCV4U CH 8 Nelson SolutionsDokument29 SeitenMCV4U CH 8 Nelson SolutionsStephanieNoch keine Bewertungen
- Chapitre 1 Part 2 IMEA 1Dokument40 SeitenChapitre 1 Part 2 IMEA 1marthy23Noch keine Bewertungen
- Temperature effects on semiconductor speed and reliabilityDokument20 SeitenTemperature effects on semiconductor speed and reliabilityohenri100Noch keine Bewertungen
- Linear MotionDokument29 SeitenLinear MotionElyna RedzuanNoch keine Bewertungen
- Separation of HCl-H2SO4 by MDDokument7 SeitenSeparation of HCl-H2SO4 by MDKuldeep BhattNoch keine Bewertungen