Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Fall 17 Masters GuideDokument50 SeitenFall 17 Masters GuideShivam Agarwal80% (5)
- CMM COMPONENT ELT 570-5000 - Rev - ADokument81 SeitenCMM COMPONENT ELT 570-5000 - Rev - AREY DAVIDNoch keine Bewertungen
- Naina Semiconductor LTD.: Single Phase Half Controlled Bridge Rectifier, 45 AmpsDokument2 SeitenNaina Semiconductor LTD.: Single Phase Half Controlled Bridge Rectifier, 45 Ampsdoggaravi07Noch keine Bewertungen
- FDP BrochureDokument2 SeitenFDP Brochuredoggaravi07100% (1)
- Or To ofDokument1 SeiteOr To ofdoggaravi07Noch keine Bewertungen
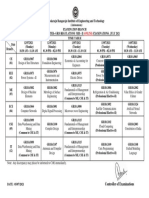
- B.Tech. III-II (GR18) Mid-IIDokument1 SeiteB.Tech. III-II (GR18) Mid-IIdoggaravi07Noch keine Bewertungen
- Or To ofDokument1 SeiteOr To ofdoggaravi07Noch keine Bewertungen
- B.Tech III Year 2021-22 I Sem Students ListDokument1 SeiteB.Tech III Year 2021-22 I Sem Students Listdoggaravi07Noch keine Bewertungen
- AI, Machine Learning, Deep Learning and Automation Applications in Electrical Datasets: Theory To Hands On PracticeDokument2 SeitenAI, Machine Learning, Deep Learning and Automation Applications in Electrical Datasets: Theory To Hands On Practicedoggaravi07Noch keine Bewertungen
- NEP Final For Circulation PDFDokument60 SeitenNEP Final For Circulation PDFNaren SainiNoch keine Bewertungen
- Electrical Engineering Department Indian Institute of Technology RoorkeeDokument2 SeitenElectrical Engineering Department Indian Institute of Technology Roorkeedoggaravi07Noch keine Bewertungen
- National Institute of Technology Calicut: TH THDokument8 SeitenNational Institute of Technology Calicut: TH THParthiban PNNoch keine Bewertungen
- Electrical Engineering Department Indian Institute of Technology RoorkeeDokument2 SeitenElectrical Engineering Department Indian Institute of Technology Roorkeedoggaravi07Noch keine Bewertungen
- New Doc - IAF PDFDokument6 SeitenNew Doc - IAF PDFdoggaravi07Noch keine Bewertungen
- Electrical Engineering Department Indian Institute of Technology RoorkeeDokument2 SeitenElectrical Engineering Department Indian Institute of Technology Roorkeedoggaravi07Noch keine Bewertungen
- Teaching: 1. PhilosophyDokument2 SeitenTeaching: 1. Philosophydoggaravi07Noch keine Bewertungen
- Iowa State University Electrical and Computer Engineering E E 452. Electric Machines and Power Electronic Drives Lab SafetyDokument1 SeiteIowa State University Electrical and Computer Engineering E E 452. Electric Machines and Power Electronic Drives Lab Safetydoggaravi07Noch keine Bewertungen
- F20A Annexure 1 AP Area QualificationsDokument4 SeitenF20A Annexure 1 AP Area Qualificationsdoggaravi07Noch keine Bewertungen
- 12th Advt. Recommended Applications: S. No. Application Ref No. IF No. Name UniversityDokument33 Seiten12th Advt. Recommended Applications: S. No. Application Ref No. IF No. Name Universitydoggaravi07Noch keine Bewertungen
- Result of Indo-Hungarian S&T Cooperation Programme-2020Dokument3 SeitenResult of Indo-Hungarian S&T Cooperation Programme-2020doggaravi07Noch keine Bewertungen
- Post Details: Other BenefitsDokument1 SeitePost Details: Other BenefitsRākesh RakhiNoch keine Bewertungen
- Scheme Document FDP PDFDokument3 SeitenScheme Document FDP PDFdoggaravi07Noch keine Bewertungen
- Subject: Recruitment To The Post of Senior Research Officer) / Research Officer in DMEO, NITI AayogDokument31 SeitenSubject: Recruitment To The Post of Senior Research Officer) / Research Officer in DMEO, NITI Aayogdoggaravi07Noch keine Bewertungen
- GATI - Call For EoIDokument10 SeitenGATI - Call For EoIdoggaravi07Noch keine Bewertungen
- 215923Dokument1 Seite215923doggaravi07Noch keine Bewertungen
- (Final) Korea Research Fellowship (KRF) - 19 2nd Call For Proposal - Announcement (English)Dokument7 Seiten(Final) Korea Research Fellowship (KRF) - 19 2nd Call For Proposal - Announcement (English)doggaravi07Noch keine Bewertungen
- 06857392Dokument13 Seiten06857392doggaravi07Noch keine Bewertungen
- SZSIDokument10 SeitenSZSIdoggaravi07Noch keine Bewertungen
- What Are The Basic Electrical Safety Issues and Version 2Dokument36 SeitenWhat Are The Basic Electrical Safety Issues and Version 2doggaravi07Noch keine Bewertungen
- Call For PapersDokument1 SeiteCall For Papersdoggaravi07Noch keine Bewertungen
- Call For Paper PDFDokument1 SeiteCall For Paper PDFdoggaravi07Noch keine Bewertungen
- DeclarationDokument1 SeiteDeclarationdoggaravi07Noch keine Bewertungen
- 7 - GEH-6370 MK V Time SynchronizationDokument44 Seiten7 - GEH-6370 MK V Time SynchronizationBouazzaNoch keine Bewertungen
- Fire Risk Assessment ChecklistDokument10 SeitenFire Risk Assessment Checklistm. absiyeNoch keine Bewertungen
- How To Get A Non-Professional Driver's License in The Philippines 2014Dokument7 SeitenHow To Get A Non-Professional Driver's License in The Philippines 2014rkris88Noch keine Bewertungen
- EM Console Slowness and Stuck Thread IssueDokument10 SeitenEM Console Slowness and Stuck Thread IssueAbdul JabbarNoch keine Bewertungen
- Plastic, Rubber & Recycling IndustryDokument7 SeitenPlastic, Rubber & Recycling IndustryPassionate_to_LearnNoch keine Bewertungen
- C 2018-07-10 ME H. Pelders S M. Ummelen ME PCL R. Menon/hpe 1 of 2Dokument2 SeitenC 2018-07-10 ME H. Pelders S M. Ummelen ME PCL R. Menon/hpe 1 of 2mokie305Noch keine Bewertungen
- Comp Reflection Short 1Dokument10 SeitenComp Reflection Short 1api-295784162Noch keine Bewertungen
- RISC Vs CISC - The Post-RISC Era - Jon "Hannibal" StokesDokument26 SeitenRISC Vs CISC - The Post-RISC Era - Jon "Hannibal" Stokesjlventigan100% (1)
- GET OA Doc - Batch 2Dokument3 SeitenGET OA Doc - Batch 2Ganesh Sai VelidiNoch keine Bewertungen
- Crane GBLDokument2 SeitenCrane GBLbudi setiawanNoch keine Bewertungen
- Walls2017 DemolitionforsustainableconstructionRGDokument6 SeitenWalls2017 DemolitionforsustainableconstructionRGStefan GhidiuNoch keine Bewertungen
- SM BrochureDokument5 SeitenSM BrochureISMARNoch keine Bewertungen
- Don Honorio Ventura Technological State University: Dr. Enrique G. BakingDokument1 SeiteDon Honorio Ventura Technological State University: Dr. Enrique G. BakingJulianne DucutNoch keine Bewertungen
- Automatic Street Light ControllerDokument23 SeitenAutomatic Street Light ControllerAnjali Sharma100% (2)
- The Age of Exploration/Age of Discovery: Countries InvolvedDokument6 SeitenThe Age of Exploration/Age of Discovery: Countries InvolvedRocky RayoNoch keine Bewertungen
- Authorized Signatories: For Checking AccountsDokument1 SeiteAuthorized Signatories: For Checking AccountsNivlac NeburNoch keine Bewertungen
- Operating Manual: Wheel Loader L538 - 432 From 13100Dokument284 SeitenOperating Manual: Wheel Loader L538 - 432 From 13100Jacques Van Niekerk80% (5)
- Filler Efect in ShotcreteDokument24 SeitenFiller Efect in ShotcreteOscar NietoNoch keine Bewertungen
- Fine Focus 450Dokument70 SeitenFine Focus 450Guilherme Altenbernd100% (3)
- Ze Gcs04a20-Eng 247-270Dokument24 SeitenZe Gcs04a20-Eng 247-270ikrima BenNoch keine Bewertungen
- Vi Quick ReferenceDokument1 SeiteVi Quick ReferenceSneetsher Crispy100% (6)
- K13 High-Flex Waterproofing SlurryDokument3 SeitenK13 High-Flex Waterproofing SlurryAmila SampathNoch keine Bewertungen
- Unit 1 - Step 2 Comprehend Intellectual Property: Valuation and Negotiation of TechnologyDokument16 SeitenUnit 1 - Step 2 Comprehend Intellectual Property: Valuation and Negotiation of TechnologyGiovanny MicNoch keine Bewertungen
- Control Systems Vs Machine LearningDokument2 SeitenControl Systems Vs Machine LearningSufiyan N-YoNoch keine Bewertungen
- 3CP.1.3 PaperDokument4 Seiten3CP.1.3 PaperAlexander ChekalinNoch keine Bewertungen
- Interface Verilog CodeDokument21 SeitenInterface Verilog CodeVishwanath B RajashekarNoch keine Bewertungen
- Cobra-5: Power Brush SystemDokument12 SeitenCobra-5: Power Brush SystemJuan Carlos CarrilloNoch keine Bewertungen