Das könnte Ihnen auch gefallen
- Autonomous Vaccum Cleaner ReportDokument10 SeitenAutonomous Vaccum Cleaner ReportOmkar KarnikNoch keine Bewertungen
- r05320305 Design of Machine Members IIDokument11 Seitenr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- PDF Roboics1Dokument65 SeitenPDF Roboics1Sai Krishna TejaNoch keine Bewertungen
- Industrial Robotics AssignmentDokument3 SeitenIndustrial Robotics Assignmentpikaboo1Noch keine Bewertungen
- Scorbot TutorialDokument9 SeitenScorbot TutorialPeru HayaNoch keine Bewertungen
- Chapter 2Dokument19 SeitenChapter 2Aung ThikeNoch keine Bewertungen
- Snake Robot ProjectDokument41 SeitenSnake Robot ProjectNikhil SinghNoch keine Bewertungen
- Walking Movement in RobotDokument24 SeitenWalking Movement in RobotNandy ObNoch keine Bewertungen
- Chapter 2 SolutionDokument4 SeitenChapter 2 SolutionEngr ShabirNoch keine Bewertungen
- Six Legged Robot For Agricultural Purpose Which Can Seed and Spray The WaterDokument5 SeitenSix Legged Robot For Agricultural Purpose Which Can Seed and Spray The WaterAbrar MuhammedNoch keine Bewertungen
- RobotDokument5 SeitenRobotSonal Mehir RamjununNoch keine Bewertungen
- Robotics and Automations Material - M - Vinoth KumarDokument63 SeitenRobotics and Automations Material - M - Vinoth Kumartumati venkata vinayNoch keine Bewertungen
- LS1 Introduction To Robotics PDFDokument68 SeitenLS1 Introduction To Robotics PDFTsz Kin ChanNoch keine Bewertungen
- Controlling an Arm Robot with PLCDokument3 SeitenControlling an Arm Robot with PLCYehezkiel88Noch keine Bewertungen
- Down-Line Loading On Hero RobotDokument40 SeitenDown-Line Loading On Hero RobotAnonymous qTKCWlxNoch keine Bewertungen
- Robotics Lab Report Group 8 PDFDokument16 SeitenRobotics Lab Report Group 8 PDFSourabh AgrawalNoch keine Bewertungen
- Project Report Hexapod RobotDokument3 SeitenProject Report Hexapod RobotJunaid JahangirNoch keine Bewertungen
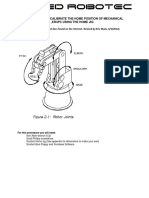
- ADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSDokument15 SeitenADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSpauloNoch keine Bewertungen
- Wheel Leg 2011-224Dokument8 SeitenWheel Leg 2011-224idorofte8235Noch keine Bewertungen
- Walking Machines: An Introduction To Legged RobotsDokument183 SeitenWalking Machines: An Introduction To Legged Robotsadina crisanNoch keine Bewertungen
- Robo CellDokument84 SeitenRobo CelldviryNoch keine Bewertungen
- Johnny5 RobotDokument2 SeitenJohnny5 RobotXavier MuñozNoch keine Bewertungen
- TOW - Tube-Launched - Optically Tracked - Wire-Guided Missle Rocket MotorDokument1 SeiteTOW - Tube-Launched - Optically Tracked - Wire-Guided Missle Rocket MotorhdslmnNoch keine Bewertungen
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDokument73 SeitenIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Build Your Own Two Wheel Self Balancing RobotDokument2 SeitenBuild Your Own Two Wheel Self Balancing RobotmalaigolokNoch keine Bewertungen
- Inverse Kinematic Control of A Prosthetic ArmDokument26 SeitenInverse Kinematic Control of A Prosthetic Armodsnet100% (1)
- An Innovative Solar Based Robotic Floor CleanerDokument6 SeitenAn Innovative Solar Based Robotic Floor CleanerInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Hovercraft Synopsis by Shivam AggarwalDokument8 SeitenHovercraft Synopsis by Shivam Aggarwalshivam agarwalNoch keine Bewertungen
- Robotics Lab Session Covers Drive Mechanisms, Payloads, Sensors (MECH 4002YDokument12 SeitenRobotics Lab Session Covers Drive Mechanisms, Payloads, Sensors (MECH 4002Ysanjiv0909Noch keine Bewertungen
- PR2Dokument14 SeitenPR2JenesaVillahermosaNoch keine Bewertungen
- IRobot 310 SUGV SpecsDokument2 SeitenIRobot 310 SUGV Specsdas1717Noch keine Bewertungen
- Walking Trajectory Control of A Biped RobotDokument18 SeitenWalking Trajectory Control of A Biped RobotBogdan PopNoch keine Bewertungen
- Robocode AdvanceDokument19 SeitenRobocode AdvancekhiemNoch keine Bewertungen
- Robo War Arena ProposalDokument9 SeitenRobo War Arena ProposalPraveen D JadhavNoch keine Bewertungen
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliDokument10 SeitenROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- Robot DesignDokument31 SeitenRobot DesignAnn ParaskNoch keine Bewertungen
- Robotic ArmDokument106 SeitenRobotic ArmGourav SinglaNoch keine Bewertungen
- Snake Robots Seminar ReportDokument31 SeitenSnake Robots Seminar Reportrahul9985100% (2)
- Drawing RobotDokument9 SeitenDrawing Robotmarius_danila8736100% (1)
- Denavit Hartenberg KinematicsDokument32 SeitenDenavit Hartenberg KinematicshasdaNoch keine Bewertungen
- Robot and servo drives courseDokument2 SeitenRobot and servo drives coursekarthik rajNoch keine Bewertungen
- Line Follower RobotDokument5 SeitenLine Follower Robotsud93100% (2)
- Kawasaki Robotics B SeriesDokument6 SeitenKawasaki Robotics B SeriescarrizolocoNoch keine Bewertungen
- Robotics in ManufacturingDokument8 SeitenRobotics in ManufacturingJadelyn MangondatoNoch keine Bewertungen
- Robotics Unit-5 Question BankDokument6 SeitenRobotics Unit-5 Question BankveerapandianNoch keine Bewertungen
- ASIMO, A Humanoid Robot Manufactured by Honda Robot Is ADokument23 SeitenASIMO, A Humanoid Robot Manufactured by Honda Robot Is AANUJNoch keine Bewertungen
- ScaraDokument7 SeitenScaraAnand Kumar MishraNoch keine Bewertungen
- ICARCV 2010 Conference GuideDokument154 SeitenICARCV 2010 Conference GuidekamleshyadavmoneyNoch keine Bewertungen
- STS121 M3L3 - Automation and RoboticsDokument8 SeitenSTS121 M3L3 - Automation and RoboticsJusteene SaysonNoch keine Bewertungen
- Introduction To RoboticsDokument27 SeitenIntroduction To Roboticsmech roboNoch keine Bewertungen
- Robocode With Wave and Virtual BulletDokument5 SeitenRobocode With Wave and Virtual BulletRuijiao Mavericky LiNoch keine Bewertungen
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDokument30 SeitenAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Feedback 35-001-USB PDFDokument2 SeitenFeedback 35-001-USB PDFFrancisco OchoaNoch keine Bewertungen
- 6 DOF Robot Arm Installation DiagramDokument8 Seiten6 DOF Robot Arm Installation DiagramMarcel RibeiroNoch keine Bewertungen
- Compendium On IR-DRDO Biotoilets For Indian RailwaysDokument202 SeitenCompendium On IR-DRDO Biotoilets For Indian Railwaysvenkat6299Noch keine Bewertungen
- MajorDokument59 SeitenMajorpramodNoch keine Bewertungen
- ABU Robocon 2016 Bangkok Clean Energy ContestDokument40 SeitenABU Robocon 2016 Bangkok Clean Energy ContestMuhammad Rizky BaghdimzNoch keine Bewertungen
- Robolution RJIT Sponsorship ProposalDokument26 SeitenRobolution RJIT Sponsorship ProposalGaurav BhardwajNoch keine Bewertungen
- Project Report of Robocon 2010 "Robo-Pharaohs Build Pyramids"Dokument14 SeitenProject Report of Robocon 2010 "Robo-Pharaohs Build Pyramids"Diptanil ChaudhuriNoch keine Bewertungen
- BHEL - PresentationDokument32 SeitenBHEL - Presentationsenthil031277Noch keine Bewertungen
- Standing Waves Worksheet SolutionsDokument6 SeitenStanding Waves Worksheet SolutionsMaher TrabelsiNoch keine Bewertungen
- BSBPMG410+Apply+project+time+management+techniques V170225Dokument35 SeitenBSBPMG410+Apply+project+time+management+techniques V170225Sabrina Gao100% (1)
- Mount EFS Across VPCs and Availability ZonesDokument12 SeitenMount EFS Across VPCs and Availability Zonesbiswajit patrasecNoch keine Bewertungen
- Nuclear ReactorsDokument45 SeitenNuclear ReactorsAtul100% (3)
- Elsa CableDokument2 SeitenElsa CableJay WangNoch keine Bewertungen
- Sika PDS E SikaRep SDokument3 SeitenSika PDS E SikaRep Slwin_oo2435Noch keine Bewertungen
- Stray Current CorrosionDokument21 SeitenStray Current CorrosionPaolo Mogollon AcostaNoch keine Bewertungen
- HSP Power Point PresentationDokument10 SeitenHSP Power Point PresentationocintezaNoch keine Bewertungen
- Computer Aided Design Course Code: 3341904Dokument7 SeitenComputer Aided Design Course Code: 3341904Dhaval UpadhyayNoch keine Bewertungen
- Reading 03 - Iron Lady The Eiffel TowerDokument2 SeitenReading 03 - Iron Lady The Eiffel TowerFernando Elías Valderrama GómezNoch keine Bewertungen
- Main Engine Cylinder Liner Crack: Return To TOCDokument2 SeitenMain Engine Cylinder Liner Crack: Return To TOCRani NoumanNoch keine Bewertungen
- Concept of Stress: DR Atul JAIN Mechanical Engineering Department Indian Institute of Technology KharagpurDokument57 SeitenConcept of Stress: DR Atul JAIN Mechanical Engineering Department Indian Institute of Technology Kharagpursneha KumariNoch keine Bewertungen
- PE Electromagnetic Pump Unit PE GB T1101 01-02-182Dokument4 SeitenPE Electromagnetic Pump Unit PE GB T1101 01-02-182li geneNoch keine Bewertungen
- Sublimation of CaffeineDokument3 SeitenSublimation of CaffeineNabil ShaikhNoch keine Bewertungen
- Assist. Prof. DR - Thaar S. Al-Gasham, Wasit University, Eng. College 136Dokument49 SeitenAssist. Prof. DR - Thaar S. Al-Gasham, Wasit University, Eng. College 136Hundee HundumaaNoch keine Bewertungen
- Xlpe - Ls243Nta: - 1 Technical Data Sheet Crosslinkable Polyethylene CompoundDokument3 SeitenXlpe - Ls243Nta: - 1 Technical Data Sheet Crosslinkable Polyethylene CompoundLe MinhNoch keine Bewertungen
- De-Emulsifier - Clay Stabilizer Foreecs: UralplastDokument3 SeitenDe-Emulsifier - Clay Stabilizer Foreecs: UralplastNinaNoch keine Bewertungen
- NOx Control of Kiln and Preheater Complete AnalysisDokument129 SeitenNOx Control of Kiln and Preheater Complete AnalysisAnonymous sfY8T3q0100% (2)
- Arduino Uno Schematic Annotated1Dokument1 SeiteArduino Uno Schematic Annotated1matthewwu2003100% (1)
- 747ERDokument8 Seiten747ERelmobareck elghadhiNoch keine Bewertungen
- CRI PumpsDokument13 SeitenCRI Pumpscrigroups0% (1)
- Grade CalculatorDokument1 SeiteGrade CalculatorKHENN ALDIANONoch keine Bewertungen
- Thermit Australia Product Catalogue 2012Dokument20 SeitenThermit Australia Product Catalogue 2012Rey Luis TehNoch keine Bewertungen
- Wae 22462 AuDokument8 SeitenWae 22462 AuDaniel ManoleNoch keine Bewertungen
- IPTC 12029 Selection Criteria For Artificial Lift Technique in Bokor FieldDokument13 SeitenIPTC 12029 Selection Criteria For Artificial Lift Technique in Bokor FieldJean Carlos100% (1)
- ZMD402AT-CT Technical DataDokument7 SeitenZMD402AT-CT Technical DataCarlos SandersNoch keine Bewertungen
- f094 PDFDokument4 Seitenf094 PDFAnshuman SinghNoch keine Bewertungen
- PLKKKDokument36 SeitenPLKKKelecompinnNoch keine Bewertungen
- Plastic Sub Pumps Catalog 60Hz - USDokument44 SeitenPlastic Sub Pumps Catalog 60Hz - UScarlosNoch keine Bewertungen