Beruflich Dokumente
Kultur Dokumente
Redes Industriales, Capitulo 8
Hochgeladen von
Alex GuamánCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Redes Industriales, Capitulo 8
Hochgeladen von
Alex GuamánCopyright:
Verfügbare Formate
Dpto.
Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
8. REDES DE CAMPO
El modelo jerrquico es una herramienta muy til para disear infrestructura de
redes corporativas confiables y eficientes.
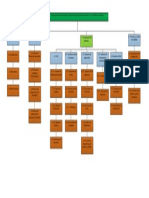
Figura 8.1. Modelo jerrquico de una red corporativa.
El modelo jerrquico divide una red en tres capas:
Capa de Acceso.
Proporciona a los usuarios acceso a la red y sus equipos y servicios. En una red
corporativa, la capa de acceso generalmente incorpora switches LAN con puertos
que proveen conectividad a las estaciones de los usuarios y a los servidores. En un
ambiente WAN, proveer a trabajadores a distancia o sitios remotos acceso a la red
corporativa por medio de tecnologas de comunicacin WAN. En un ambiente
industrial, esta capa correspondera a la capa de buses I/O donde se encontraran
los sensores y actuadores inteligentes; es decir, como se ver ms adelante,
aquellos provistos de interfaces para conexin a una red. El dispositivo inteligente
que se encontrar en este nivel ser el PLC local de control.
Capa de Distribucin
En un ambiente corporativo, es en esta capa donde se agrupan los armarios de
comunicaciones, que son los equipos donde converge el cableado, usando switches
para segmentar grupos de trabajo y as aislar los problemas de una red. Se dice que
en este campo es donde se implementa conectividad basada en las polticas
particulares de una empresa. Aqu es donde se filtra trfico para decidir quien puede
Dr. Luis Corrales
ENERO 2008
Pg. 127
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
conectarse con quien. Adems, en esta capa es donde se provee la conectividad
hacia las redes WAN situadas en el borde de conectividad empresarial.
Core layer
Tambin referida como el backbone, hace referencia a tecnologas que proveen alta
velocidad para conmutar paquetes tan rpido como sea posible. Debido a que la
capa core es crtica para la conectividad, debe proporcionar un alto nivel de
disponibilidad y adaptacin a cambios con mucha rapidez. Tambin debe proveer
escalabilidad y convergencia rpida.
Siguiendo este modelo es que una red industrial tiene el modelo jerrquico que se
muestra a continuacin.
8.1.
ARQUITECTURA DE LAS REDES DE CAMPO INDUSTRIALES
Las redes industriales, limitadas antes a comunicar los diferentes dispositivos de
campo (transductores y transmisores con actuadores) han ido evolucionando para
poder procesar los datos que una planta moderna debe generar para ser
competitiva, segura, confiable. As mismo, han tenido que desarrollarse para poder
satisfacer las necesidades de informacin que ahora se tiene no solo a nivel de
proceso sino tambin a nivel de gerencia.
Para poder satisfacer estos requerimientos, que implica que en una red industrial
moderna deban coexistir equipos de todo tipo, es necesario agruparlos en una forma
jerrquica, de tal forma que se optimice su uso, administracin y mantenimiento.
Nivel de Gestin: Se encarga de integrar los niveles inferiores a una estructura
organizada y jerrquica. Las mquinas en este nivel sirven de enlace entre el
proceso productivo y el rea de gestin, en la cual se requiere informacin sobre
ventas, tiempos de produccin, repuestos en bodega, etc. Emplean redes tipo LAN y
WAN que funcionan bajo protocolos como Ethernet y TCP/IP.
Nivel de Control: Se encarga de enlazar y controlar los distintos procesos, lneas de
produccin de una planta industrial. A este nivel se sitan los PLCs de gran
desempeo y poder, as como computadoras destinadas a diseo, control de
calidad, programacin. Suelen emplear redes tipo LAN que funcionan bajo el
protocolo Ethernet y/o Ethernet Industrial.
Nivel de Campo y Proceso: Aqu se realiza la integracin de la informacin
generada y requerida por los procesos de campo automticos y controlados que
utilizan PLCs y Controladores, multiplexores de Entrada / Salida (I/O), controladores
PID, etc., conectados en sub redes. Aqu es frecuente encontrar uno o varios
autmatas modulares, actuando como maestros. En este nivel se emplean los buses
o redes industriales de campo que funcionan bajo protocolos como Fieldbus,
Profibus, por mencionar algunos.
Nivel de I/O: Es el nivel ms prximo a las variables fsicas de la planta. Aqu se
hallan los sensores (transmisores) y actuadores encargados de medir y controlar los
procesos productivos, respectivamente. Basados en la informacin que se recoge en
este nivel, aplicaciones de control toman las decisiones necesarias que garantizan
Dr. Luis Corrales
ENERO 2008
Pg. 128
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
una correcta automatizacin. En este nivel se emplean protocolos como: Seriplex,
Hart, CanBus, etc.
Una planta industrial organizada de esta forma requiere de sistemas: SCADA, DCS,
Muliplexores y HMIs. Vale indicar que un diagrama representativo de una planta
organizada de esta forma suele parecer ser simple. Lneas que unen un bus con
otro, ocultan la complejidad que en realidad existe. Desde ya debe entenderse que
la unin no es solamente asunto de unir elctricamente un bus con otro, sino lograr
que dos protocolos diferentes puedan comunicarse entre si. Para esto hay
dispositivos especialmente diseados con este propsito cuyos protocolos (como el
Ethernet/ModbusRTU) y funcionamiento se estudiar ms adelante.
Figura 3.1. Niveles de una red industrial
En este captulo se introduce el concepto de las redes de campo industriales o,
como tambin se las denomina, el Bus I/O /Entrada / Salida).
Existen dos tipos de buses I/O; el bus de dispositivos y el bus de procesos. Las
redes industriales o buses I/O permite a un PLC comunicarse con dispositivos de
entrada y salida de manera similar a como en una red de rea local, PCs o PLCs
supervisores se comunican con PLCs individuales (Figura 4.1).
Dr. Luis Corrales
ENERO 2008
Pg. 129
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.1. Diagrama de bloques de una red de campo o bus I/O
Esta configuracin descentraliza el control en un sistema para que los PLCs se
encarguen de controlar partes de un todo, dando como resultado un sistema de
control ms grande y rpido. Rpido pues la informacin tender a viajar solamente
hasta / desde un PLC. Poco trfico ser el que tenga que recorre muchos caminos
en la red con lo que se optimiza el flujo de datos en la misma. La topologa o
arquitectura fsica de un bus I/O sigue la configuracin de un bus o bus extendido,
esto permite que dispositivos inteligente (interruptores de fin de carrera,
fotoelctricos y de proximidad) se conecten directamente sea a otro PLC o a una
LAN. En estos buses se debe hacer notar una diferencia: el bus, a ms de tener
lneas para transmitir datos, puede tambin tener lneas de alimentacin. La Figura
4.2 ilustra una conexin tpica entre un PLC, una red de rea local y un bus I/O.
Dr. Luis Corrales
ENERO 2008
Pg. 130
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.2 Conexin entre un PLC, una LAN y un Bus I/O
A un bus I/O se debe conectar dispositivos inteligentes (Figura 4.3) donde lo de
inteligente se puede traducir como un dispositivo que tiene los circuitos y la lgica
para compartir el medio fsico con otros dispositivos.
En un bus I/O, el PLC maneja los dispositivos inteligentes directamente sin el uso de
mdulos de entrada y salida; lo que quiere decir que el PLC se conecta y se
comunica con los dispositivos inteligentes de entrada y salida de acuerdo a un
protocolo de bus. Para esto el PLC usa un I/O bus Network scanner. Un bus I/O
scanner lee y escribe a la direccin de cada uno de los dispositivos inteligentes, al
mismo tiempo que lee la informacin contenida en los paquetes de la red. Una red
grande con bus de topologa de rbol puede tener hasta 2048 dispositivos de campo
discretos o ms conectados.
Figura 4.3 Conexin de un dispositivo inteligente a una red bus I/O
Dr. Luis Corrales
ENERO 2008
Pg. 131
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Los dispositivos inteligentes conectados en un bus I/O poseen inteligencia en la
forma de un microprocesador u otros circuitos (Figura 4.4).
Figura 4.4. Inteligencia en un dispositivo
Estos dispositivos no solo comunican el estado (ON/OFF) de una entrada y salida,
sino que tambin dan un diagnstico de sus estados de operacin. Por ejemplo un
sensor fotoelctrico puede reportar cuando su ganancia interna empieza a decrecer
por un lente sucio; o un interruptor de lmite puede reportar el nmero de
movimientos que ha ejecutado. Este tipo de informacin puede prever un mal
funcionamiento de un dispositivo de entrada salida y puede indicar cuando un sensor
ha llegado a su lmite de vida y tiene que ser cambiado.
4.1.
TIPOS DE BUS I/O EN REDES.
Los buses I/O de redes pueden dividirse en dos diferentes categoras: una que tiene
que ver con dispositivos de bajo nivel que son tpicos de operacin de manufactura
discretas y los otros son dispositivos de alto nivel utilizados en procesos industriales.
Las categoras de los buses de red son:
Buses de dispositivos.
Buses de proceso.
Bus de Dispositivos.- Es la interfaz con los dispositivos de campo de bajo nivel
(pulsadores, interruptores de fin de carrera, etc), cuyo fin es proporcionar
informacin respecto al estado de los dispositivos (ON/OFF) o al estado de
operacin (operacin correcta / incorrecta). Estas redes generalmente trasmiten solo
desde unos pocos bits hasta varios bytes de datos en un determinado tiempo.
Bus de Proceso.- Por otro lado, estos buses se conectan a dispositivos de campo
capaces de generar un alto nivel de informacin (vlvulas de proceso inteligentes,
medidores de nivel inteligentes, etc), que tpicamente se emplean en aplicaciones de
control de procesos en donde se requiere un control ms fino de sus variables. El
bus de procesos maneja grandes lotes de datos (varias centenas de bytes), dando
informacin acerca del proceso, as como de los mismos dispositivos de campo
(marca del equipo, fecha de ltimo mantenimiento, etc). La Figura 4.5 ilustra la
clasificacin de los dos tipos de busesI/O
Dr. Luis Corrales
ENERO 2008
Pg. 132
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
La mayora de dispositivos conectados a un bus de procesos son analgicos, cuya
informacin por supuesto debe ser convertida a digital para su transmisin; los
dispositivos conectados a un bus de dispositivos son discretos. Sin embargo, el bus
de dispositivos algunas veces incluye dispositivos analgicos como termocuplas y
controladores de velocidad, que transmiten unos pocos bytes de informacin.
El bus de dispositivos que incluye dispositivos discretos, tanto como pequeos
dispositivos analgicos, son llamados byte-wide bus networks que podra
traducirse como redes con bus para transmitir bytes. Estas redes pueden transferir
entre 1 a 50 o ms bytes de datos en un determinado momento. El bus de
dispositivos que se comunica solo con dispositivos discretos es llamado bit-wide bus
networks, este transfiere menos de 8 bits de datos desde dispositivos discretos
simples a distancias relativamente cortas.
La razn principal para que el bus de dispositivos trabaje con dispositivos discretos y
el bus de procesos con analgicos es el requerimiento diferente de transmisin de
datos. El tamao de los paquetes de informacin tiene un efecto inverso en la
velocidad con que estos datos viajan en la red. Puesto que los buses de dispositivos
trasmiten poca informacin pueden trabajar a gran velocidad y por lo mismo
deberan emplearse en aplicaciones donde se requiere de rapidez de accionamiento
de ciertos dispositivos, caso de una electro vlvula por ejemplo. El bus de procesos
trabaja lentamente por el gran tamao de los paquetes de datos y, por lo mismo, se
los aplica ms para el control de dispositivos de entrada/salida analgicas que no
requieren una respuesta rpida de tiempo, por ejemplo una servo vlvula.
Las velocidades de transmisin para ambos tipos de buses I/O pueden ser de hasta
1 y 2.5 Mbytes por segundo. Sin embargo un bus de dispositivos puede entregar
ms paquetes de informacin que el bus de procesos.
Puesto que por un bus de proceso se puede transmitir varios cientos de bytes de
datos, son apropiados para aplicaciones que requieren una transmisin de datos
Dr. Luis Corrales
ENERO 2008
Pg. 133
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
complejos. Por ejemplo, un bus de procesos compatible con un transmisor de
presin puede proveer de control con mucha mayor informacin que solo presin,
esta puede tambin transmitir informacin acerca del flujo de temperatura flotante y
as como de su operacin interna. Este tipo de informacin requiere un paquete
largo de datos a transmitir y para esto es apropiado el bus de proceso pues en el de
dispositivos simplemente no cabra.
4.2.
PROTOCOLOS DE LOS BUSES Y REDES DE CAMPO INDUSTRIALES
Ninguno de los dos buses I/O tienen un protocolo estndar; sin embargo algunas
organizaciones estn trabajando para desarrollar tanto especificaciones para los
buses de dispositivos como de proceso.
En el rea del bus de proceso dos organizaciones principales, la Fundacin Fieldbus
(que es el resultado de la unin de la Fundacin ISP y FIP) y la Organizacin de
Comercio Profibus (bus de proceso inteligente) estn trabajando para producir
estndares para protocolos y redes industriales.
Otras organizaciones como la ISA y el IEC estn tambin participando en el
desarrollo de estos estndares. Esta es la razn por la que algunos fabricantes
especifican que sus productos analgicos son compatibles con Profibus, Fieldbus u
otro tipo de esquema de protocolo de comunicacin.
La Figura 4.6 ilustra un diagrama de bloques de los protocolos disponibles.
Figura 4.6 Estndares de protocolos
Otra manera de intentar una clasificacin de los buses de campo se muestra en la
Figura 4.7 a continuacin.
Dr. Luis Corrales
ENERO 2008
Pg. 134
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.7. Otra clasificacin de las redes o buses de campo industriales.
Tanto los buses de dispositivos como los de proceso trasmiten su informacin de la
misma manera; esto es, digitalmente. De hecho, la necesidad de la comunicacin
digital fue uno de las mayores razones para el establecimiento de las redes
industriales. La comunicacin digital es la que permite que ms de un dispositivo
pueda conectarse a un mismo medio y compartirlo debido a la capacidad de
direccionamiento que ofrecen y a que los nodos involucrados sean capaces de
reconocer los datos. Por otro lado, los datos digitales son menos propensos a sufrir
de distorsin producto de la EMI o RFI. Tambin, los PLCs pueden transmitir datos
digitales sin tener que convertirlos a anlogos y viceversa. De esta manera hay
menos errores asociados a la conversin A/D y D/A. Por ltimo otra de las grandes
ventajas tiene que ver con la enorme reduccin de cableado al no tener que
conectar los dispositivos de campo con cables de conexin individuales.
4.3.
REDES CON BUSES DE DISPOSITIVOS BIT-WIDE
Se usan con simples dispositivos de campo discretos; es decir, sensores y
actuadores tipo ON-OFF. Pueden trasmitir tan solo 4 bits (un nibble) que es
suficiente para trasmitir los datos desde estos dispositivos. Los dispositivos ms
pequeos requieren de solo un bit para operar. Minimizando la cantidad de datos
trasmitidos, estos bueses pueden proveer un rendimiento ptimo a bajos costos. Los
buses ms comunes son: ASI, InterBus Loop y Seriplex.
Red ASI
Se usa en redes que no requieren ms de 124 dispositivos de Entrada / Salida (I/O).
Estos 124 dispositivos de entrada y salida pueden conectarse a hasta 31 nodos sea
en una topologa de anillo, rbol o estrella. Los dispositivos de I/O se conecta al PLC
o a una PC por medio de una interfaz controladora (una tarjeta que se conecta al
bus). La Figura 4.8 ilustra una red bit-wide ASI.
Dr. Luis Corrales
ENERO 2008
Pg. 135
Dpto. Automatizacin y Control Industrial
Figura 4.8.
Interfaces Comunicacin Industrial
Red de dispositivos bit-wide ASI
La red se fundamenta en un chip de protocolo ASI, por lo mismo, los dispositivos
que se conecten a esta red deben tener este chip. Los dispositivos compatibles
tpicos suelen ser interruptores de proximidad, sensores fotoelctricos, interruptores
de fin de carrera y dispositivos estndar, aunque respecto a estos ltimos se debe
indicar que el chip ASI est ubicado en el nodo; es decir, un nodo inteligente con un
chip ASI esclavo.
Las redes ASI requieren una fuente de alimentacin de 24 V DC que se conecta por
medio de un par de alambres sin blindaje y no trenzados. Lo interesante es que
tanto el voltaje de alimentacin como los datos viajan por el mismo par de alambres.
La longitud mxima del cable es de 100 m desde el controlador maestro con una
velocidad de transmisin de 167 Kbps.
En la Figura 4.9 se muestra una red que combina tanto una red bit-wide ASI con una
red byte-wide CANbus. Se debe notar que la red ASI se conecta a la CANbus por
medio de un Gateway, el cual es un dispositivo que permite la comunicacin entre
redes que corren con diferente protocolo.
Dr. Luis Corrales
ENERO 2008
Pg. 136
Dpto. Automatizacin y Control Industrial
Figura 4.9.
Interfaces Comunicacin Industrial
Redes ASI y CANbus trabajando juntas.
InterBus Loop
La red bit-wide InterBus loop fue desarrollada por la compaa Phoenix Contact Inc.
y es empleada para conectar a un PLC dispositivos sensores y actuadores simples.
InterBus Loop emplea una tecnologa de alimentacin y comunicacin denominada
PowerCom para enviar la seal con el protocolo InterBus por las lneas de
alimentacin; es decir, el protocolo es modulado en las lneas de poder. Esto permite
reducir el nmero de cables requerido por la red a solamente dos conductores que
llevan tanto la alimentacin como las seales de comunicacin a los dispositivos de
campo.
Puesto que tanto InterBus-S como InterBus Loop emplean el mismo protocolo, se
pueden comunicar entre ellos por medio de un mdulo terminal InterBus Loop
localizado en la red InterBus-S, el cual se conecta a los dispositivos de campo por
medio de los dos alambres. Una red InterBus Loop se puede tambin conectar con
dispositivos no inteligentes por medio de mdulos interfaz que contienen un chip
inteligente esclavo. En la Figura 4.10 se muestra un ejemplo de conexin de estas
redes.
Dr. Luis Corrales
ENERO 2008
Pg. 137
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.10. Redes InterBus Loop e InterBus-S unidas por mdulo terminal InterBus Loop
Seriplex
La red Seriplex permite la conexin de hasta 510 dispositivos de campo a un PLC en
una configuracin Maestro / Esclavo o peer to peer. La red Seriplex se basa en el
chip ASIC (Application Specific Integrated Circuit) el cual debe estar presente en
todos los dispositivos que se conectan en esta red. Los dispositivos que no tiene
este chip puede conectarse a la red por medio de un mdulo Seriplex I/O que
contiene un chip ASIC esclavo. La interfaz ASCI I/O contiene 32 funciones lgicas
booleanas que sirven para proveer la lgica necesaria para comunicar, direccionar e
inteligencia necesaria para controlar los dispositivos de campo conectados a la red
(Figura 4.11).
Dr. Luis Corrales
ENERO 2008
Pg. 138
Dpto. Automatizacin y Control Industrial
Figura 4.11.
Interfaces Comunicacin Industrial
Red Seriplex con mdulo controlador
La red Seriplex a nivel de capa fsica puede extenderse hasta 2000m con una
topologa estrella, bus o rbol. Esta red tambin puede operar sin un controlador. A
diferencia de la red ASI, la red Seriplex se puede conectar con dispositivos anlogos
de entrada y salida; sin embargo, la seal anloga digitalizada se debe leer o escribir
bit por bit en cada ciclo de barrido. La Figura 4.12 muestra una red Seriplex tpica sin
controlador.
Figura 4.12. Interfaz Seriplex I/O sin un controlador
Dr. Luis Corrales
ENERO 2008
Pg. 139
Dpto. Automatizacin y Control Industrial
4.4.
Interfaces Comunicacin Industrial
REDES CON BUSES DE DISPOSITIVOS BYTE-WIDE
Loa buses de dispositivos byte-wide ms comunes estn basados en las redes
InterBus S y CANbus.
InterBus-S
Es una red de sensores y actuadores que conecta estos dispositivos de campo a un
PLC o a una computadora (Soft PLC) en una configuracin tipo anillo. Tiene
incorporadas interfaces I/O en sus 256 nodos posibles, que tambin incluyen
bloques terminales de conexin que posibilitan y facilitan la conexin a ms
dispositivos I/O. Gracias a estos bloques terminales es posible conectar hasta 4096
dispositivos de campo I/O (dependiendo de la configuracin) a una velocidad de 500
Kbps con deteccin de error tipo CRC.
El PLC se comunica con los dispositivos conectados al bus empleando el mtodo
Maestro / Esclavo va un mdulo o controlador de host. Por medio de una interfaz
RS-232 es posible conectar una computadora al controlador para propsitos de
diagnstico. La Figura 4.13 ilustra una red InterBus-S que muestra los dispositvos
que se han diseado para proveerle de gran funcionalidad.
Figura 4.13.
Dr. Luis Corrales
Red InterBus-S con una interfaz controlador host a un PLC
ENERO 2008
Pg. 140
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Las direcciones de los dispositivos en la red InterBus-S son automticamente
determinados por su ubicacin fsica y as se elimina la necesidad de asignar
manualmente las direcciones. El dispositivo controlador continuamente barre los
dispositivos de I/O leyendo todas las entradas en un barrido y escribiendo datos en
las salidas. InterBus-S trabaja en las capas Fsica, Enlace de Datos y Aplicacin del
modelo OSI.
A nivel de capa Fsica emplea una topologa de anillo (Figura 4.14). Permite una
longitud distribuida de cable de hasta 12.000 m. Este puede ser TP (par trenzado),
fibra ptica, infrarrojo o conexiones SMG.
Figura 4.14. Topologa de anillo de Interbus S.
Los conectores que se emplean se pueden ver en las figuras que siguen:
Dr. Luis Corrales
ENERO 2008
Pg. 141
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.15. Conectores de Interbus S.
Una red tpica se muestra en la Figura 4.16 y 4.17.
Figura 4.16. Red Interbus S tpica
Dr. Luis Corrales
ENERO 2008
Pg. 142
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.17. Uso de los conectores en la capa fsica.
TRAMA INTERBUS S
A nivel de la capa de Enlace de Datos, el protocolo recurre a un maestro que usa
registros de desplazamiento sincronizados, para la trasmisin Full-Duplex y
trasmisin total de la trama Figura 4.18. No hay arbitracin de protocolo. Puede leer
y escribir hasta 4.096 entradas y salidas digitales en menos de 14 ms. Posee
correccin de errores CRC.
Dr. Luis Corrales
ENERO 2008
Pg. 143
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.18. Tramas de Interbus S.
En la capa de Aplicacin el protocolo es capas de ubicar e identificar la causa de un
problema en la red. Hay servicio de mensajera tipo cliente servidor y posibilita
transmisin de alta velocidad tanto de los datos anlogos como digitales.
Es posible conectar hasta 256 corridas para un total de 4096 entradas digitales y
4096 salidas digitales, o una combinacin de seales digitales y anlogas.
Red CANbus Byte-Wide
Tienen como base el chip CAN que se us inicialmente en automviles para
controlar sus partes electrnicas. EL CANbus es abierto y puede manejar datos de
longitud variable de hasta 8 bytes. CAN implementa cinco mecanismos de deteccin
Dr. Luis Corrales
ENERO 2008
Pg. 144
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
de errores, entre ellos un CRC. De este modo los errores globales que ocurren en
todos los nodos se pueden detectar el 100% de las veces. La probabilidad de no
detectar un error local queda reducida a 3 x 10-5.
Existen dos implementaciones hardware bsicas, aunque la comunicacin en ambas
es idntica y son compatibles entre s. Esto permite administrar el uso del bus en
funcin de las necesidades de cada nodo.
Basic CAN: hay un vnculo muy fuerte entre el controlador CAN y el
microcontrolador asociado. El microcontrolador ser interrumpido para tratar
con cada uno de los mensajes del CAN. Cada nodo transmitir tan slo
cuando se produzca un evento en alguna de las seales que le conciernen.
Este modo de funcionamiento es adecuado para aquellos nodos encargados
de manejar informaciones espordicas, disminuyendo la ocupacin del bus.
Full CAN: contiene dispositivos de hardware adicionales que son
proporcionados por un servidor que automticamente recibe y transmite los
mensajes CAN, sin necesidad de interrumpir al microcontrolador asociado,
reducindose la carga del mismo. Est orientado a nodos encargados del
manejo de seales con un alto nivel de exigencia en cuanto a frecuencia de
actualizacin y/o seguridad
Los dispositivos se comunica por medio de 4 cables ms blindaje: 2 para los datos y
2 para la alimentacin. Hay un quinto que es el blindaje.
Figura 4.19.
Cable de comunicacin para CANbus
La comunicacin puede ser Maestro / Esclavo o peer to peer. En este ltimo caso,
como en un sistema habr parmetros que varen ms rpidamente que otros, por lo
que necesitarn una transmisin ms frecuente y un mecanismo rpido de
Dr. Luis Corrales
ENERO 2008
Pg. 145
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
asignacin del bus, para aquellas situaciones en las que haya ms de un nodo
transmitiendo a la vez, la prioridad de los mensajes CAN se determina mediante los
identificadores de los mismos. Se utiliza el mtodo CSMA/CD (Carrier Sense,
Multiple Access with Collision Detect), con la capacidad de arbitrio no destructivo
para poder detectar las posibles colisiones.
Figura 4.20. Protocolos de la capa fsica de CANBus.
TRAMA CAN BUS
Los mensajes transmitidos desde cualquier nodo en una red CAN no contienen la
direccin del nodo emisor ni la del nodo receptor. En vez de esto, los mensajes
contienen una etiqueta identificativa, nica en toda la red, que realiza esa funcin.
Estos identificadores determinan la prioridad del mensaje. El mensaje de mayor
prioridad gana el acceso al bus, mientras que los mensajes de menor prioridad se
retransmitirn automticamente en los siguientes ciclos de bus. Como consecuencia
Dr. Luis Corrales
ENERO 2008
Pg. 146
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
de esto, varios nodos pueden recibir y actuar simultneamente sobre el mismo
mensaje.
Esta estructura de los mensajes ofrece a la red una gran flexibilidad y posibilidad de
expansin, ya que nuevos nodos pueden ser aadidos a la red sin la necesidad de
hacer ningn cambio en el hardware ni en el software existente.
Las tramas de los mensajes son los elementos bsicos de transmisin y van de un
nodo emisor a uno o varios nodos receptores. Hay dos protocolos de comunicacin:
el estndar, que soporta mensajes con identificadores de 11 bits, y el expandido,
que soporta de 11 y de 29 bits.
El mensaje est dividido en siete campos diferentes, cada uno de ellos con una
funcin especfica:
Figura 4.21. Trama CANBus.
La velocidad de la trasmisin depende de la longitud del cable. La tabla abajo
muestra las velocidades para las redes CANbus: DeviceNet y SDS.
Tabla 4.1. Velocidad versus longitud de cable a) DeviceNet, b) SDS CANbus
Dr. Luis Corrales
ENERO 2008
Pg. 147
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
La red DeviceNet, que tiene como base a CANBus puede soportar 64 nodos y hasta
un mximo de 2048 dispositivos de campo.
La red SDS tambin puede manejar 64 nodos; sin embargo, este nmero puede
subir hasta 126 localidades direccionables si se emplean interfaces I/O multipuerto.
Si se usan interfaces 4 a 1, en cada nodo se pueden tener hasta 126 dispositivos no
inteligentes. Esto se muestra en la Figura 4.22.
Figura 4.22. a) Una red SDS multiplexada y b) un concentrador de I/O de alta densidad
La interfaz multipuerto tiene un chip CAN esclavo que provee la informacin del
estado de los dispositivos.
Una red SDS puede transmitir varios bytes de informacin en la forma de mensajes
de longitud variable. Por esta razn puede conectarse a dispositivos inteligentes que
Dr. Luis Corrales
ENERO 2008
Pg. 148
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
pueden traducir uno, dos o ms bytes de informacin desde la red a 16 o 32 bits de
informacin tipo ON/OFF.
La red SDS (Smart Distributed System), a nivel de la capa 2 tambin se basa en el
protocolo inmerso en el chip CAN, tanto para el formato de la trama como para la
deteccin de errores. A nivel de capa fsica requiere de 4 hilos: 2 para la
alimentacin y 2 para los datos. La velocidad de transmisin es de 1 Mbps hasta
40m y 100 Kbps hasta 800m.
La red CANbus emplea 3 de las capas del modelo OSI y define tanto el mtodo de
acceso al medio como la sealizacin a emplearse en la capa fsica. Provee CRC
para el chequeo de errores.
Un scanner o un procesador de I/O CANBus proveen la interfaz entre el PLC y la red
CANBus. En la Figura 4.23 se muestra un scanner CANBus diseado por Allen
Bradley que tiene 2 canales en los que se pueden conectar hasta 64 dispositivos.
Figura 4.23. Ejemplo de un scanner CANBus
Los conectores para la conexin se muestran en la Figura 4.24.
Dr. Luis Corrales
ENERO 2008
Pg. 149
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.24. Terminales de conexin para DeviceNet.
En la Figura 4.25 se muestra un ejemplo en el que emplea un sistema Flex I/O con
un procesador DeviceNet para crear as un susbsistema I/O DeviceNet.
Figura 4.25. Un sistema Flex I/O conectado con un procesador DeviceNet
Para tratar de cubrir todas las posibilidades de uso en una industria, DeviceNet, al
igual que otros fabricantes, han introducido una serie de dispositivos que amplan el
horizonte de esta tecnologa.
En la Figura 4.26 se muestra una red DeviceNet que muestra los dispositivos o
interfaces ofrecidas.
Dr. Luis Corrales
ENERO 2008
Pg. 150
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.26. Red DeviceNet con sus accesorios de conexin y conectividad.
Figura 4.26. Prototipo de Red DeviceNet.
4.5.
REDES CON BUSES DE PROCESO
Una red con buses de proceso es una red digital de comunicaciones, abierta y de
alto nivel que se emplea para conectar dispositivos de campo anlogos a un sistema
de control. Como se mencion antes, una red de proceso se emplea en aplicaciones
donde los sensores o actuadores anlogos de entrada / salida responden ms
lentamente que aquellos en aplicaciones con dispositivos discretos (y que conforman
las redes o buses de dispositivos). El tamao de los paquetes de informacin de
Dr. Luis Corrales
ENERO 2008
Pg. 151
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
hasta / desde estos dispositivos de campo anlogos es grande, debido a la
naturaleza de la informacin que se recoge.
Los protocolos que se empelan en estas redes de proceso transmiten a velocidades
de 1 a 2 Mbps, an as se dice que su velocidad va de lenta a mediana debido a la
gran cantidad de datos que deben transferir. De todas maneras, esta velocidad es
adecuada debido a que los dispositivos anlogos no responden instantneamente
como los discretos. En la Figura 4.27 se muestra una red de bus de proceso tpica.
Figura 4.27.
Configuracin tpica de una red de bus de proceso
Las redes de proceso pueden transmitir una gran cantidad de informacin a un PLC,
de ah que pueden mejorar notablemente la operacin de una planta o proceso. Por
ejemplo, un arranque de un motor inteligente, compatible con una red de proceso,
puede proveer informacin acerca de la cantidad de corriente consumida por el
mismo, tal que, si la cantidad de corriente sube, o hay algn sntoma de problema, el
sistema puede alertar al operador y evitar una falla potencial del motor en una lnea
de produccin crtica. La implementacin de este tipo de alerta sin una red de
proceso sera muy cara y problemtica debido a la cantidad de acometidas de
alambre que se debera instalar para transmitir este tipo de informacin.
Se cree que las redes de proceso eventualmente reemplazarn a todas las redes
anlogas 4-20 mA. Esto debido a que las redes de proceso o digitales, en general,
proveen mayor exactitud y repetibilidad, as como aaden la posibilidad de
comunicacin bidireccional entre los dispositivos de campo y los controladores
(como los PLCs) sobre el mismo par de hilos, algo que no se puede hacer con las
redes anlogas 4 20 mA.
Un PLC o computadora se comunica con una red de proceso por medio de un
mdulo o tarjeta interfaz controladora que pueden emplear sea el formato del
protocolo MODBUS, Fieldbus o Profibus. El procesador del bus de proceso
generalmente se inserta dentro del gabinete del PLC.
Dr. Luis Corrales
ENERO 2008
Pg. 152
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
4.5.1. MODBUS
El protocolo Modbus es un estndar interno que los controladores Modicon usan
para el intercambio de mensajes. Con este protocolo, los controladores Modicon
pueden comunicarse entre s y con otros dispositivos sobre una variedad de redes,
dentro de las que se incluyen las redes industriales Modicon, Modbus y Modbus
Plus, y las redes estndar MAP y Ethernet. Las redes son accedidas por medio de
puertos incorporados en los controladores o por adaptadores de red, o gateways
disponibles desde Modicon.
Tal como ya se ha dicho, el protocolo define la estructura del mensaje que los
controladores reconocen y usan. Describe tambin el protocolo de control de acceso
al medio (MAC) y cmo se detectarn y reportarn los errores.
4.5.1.1. El Ciclo Pregunta - Respuesta
Los dispositivos en una red Modbus se comunican usando la tcnica maestro
esclavo, en la cual slo un dispositivo (el maestro) puede iniciar transacciones
(llamadas peticiones queries). Los otros dispositivos (los esclavos) responden
suministrando al maestro el dato solicitado, o realizando la accin solicitada en la
peticin. A esta forma de comunicacin se conoce como el ciclo Pregunta
Respuesta.
Figura 4.29. El ciclo Pregunta Respuesta
LA PREGUNTA
Se refiere al mensaje de peticin que enva el maestro a un esclavo. El cdigo de la
funcin en la pregunta dice qu tipo de accin debe realizar el dispositivo esclavo
direccionado. Los bytes de datos contienen informacin adicional que el esclavo
necesitar para realizar la funcin. Por ejemplo, la funcin cdigo 03 solicitar al
esclavo leer los registros y responder con el contenido de los mismos. El campo de
Dr. Luis Corrales
ENERO 2008
Pg. 153
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
datos debe contener la informacin que le dice al esclavo con cual registro debe
empezar y cuntos registros debe leer. El campo de chequeo de errores provee al
esclavo un mtodo para validar la integridad del contenido del mensaje.
Ejemplo de trama Modbus usando la funcin 05
PETICION:
LA RESPUESTA
Si el esclavo realiza una respuesta normal, el cdigo de funcin en la respuesta es
un eco del cdigo de funcin en la pregunta. Los bytes de datos contienen los datos
recolectados por el esclavo, tales como valores de registros o estados.
Respuesta: es un eco si no hay error
Si un error ocurre, el cdigo de funcin se modifica para indicar que la respuesta es
una respuesta de error, y los bytes de datos contienen un cdigo que describe el
error. El campo de chequeo de error le permite al maestro confirmar que el
contenido del mensaje es vlido.
Entre los dispositivos maestros tpicos se incluyen procesadores centrales y paneles
de programacin. Esclavos tpicos son los PLCs (controladores programables).
El maestro puede direccionar esclavos individualmente o puede generar un mensaje
en modo difusin (broadcast) a todos los esclavos (en cuyo caso la direccin del
dispositivo esclavo es 0). Los esclavos solo devuelven un mensaje de respuesta a
aquellas peticiones que les son direccionadas individualmente. No se devuelven
respuestas a peticiones en modo difusin enviadas desde el maestro.
Dr. Luis Corrales
ENERO 2008
Pg. 154
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Si un error ocurriera en el recibo del mensaje, o si el esclavo es incapaz de realizar
la accin pedida, el esclavo construir un mensaje de error y lo enviar como su
contestacin.
La trama genrica de Modbus tiene el formato siguiente:
El Campo de Direccin de un trama contiene dos caracteres (ASCII) u ocho bits
(RTU). Las direcciones vlidas de un dispositivo esclavo estn en el rango de 0 a
247 decimal. Un maestro se dirige a un esclavo poniendo la direccin del esclavo en
el campo de direccin del mensaje. Cuando el esclavo enva su respuesta, pone su
propia direccin en el campo de direccin de la respuesta para permitir al maestro
saber qu esclavo est respondiendo.
El protocolo MAC Maestro / Esclavo hace innecesario incluir la direccin del
dispositivo fuente para el envo de una trama. No hay que olvidar que una
transaccin en una red maestro / esclavo es siempre iniciada por el maestro. Por la
misma razn, en el mensaje de respuesta desde un esclavo no hay que incluir la
direccin destino pues est siempre corresponder al maestro.
La direccin 0 se usa como direccin broadcast. Cuando el protocolo Modbus se usa
en redes de nivel ms alto, puede que no se permitan transmisiones broadcast, o
puede que sean reemplazadas por otros mtodos. Por ejemplo, Modbus Plus usa
una base de datos global compartida que se actualiza con cada rotacin del token.
El campo Cdigo de Funcin de una trama contiene dos caracteres (ASCII) u ocho
bits (RTU). Los cdigos Vlidos estn en el rango de 1 a 255 decimal. De stos,
Dr. Luis Corrales
ENERO 2008
Pg. 155
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
algunos cdigos son aplicables a todos los controladores Modicon, mientras algunos
cdigos slo aplican a ciertos modelos, y otros son reservados para uso futuro.
El campo de datos se construye usando juegos de dos dgitos hexadecimales en el
rango de 00 al hexadecimal FF. stos pueden hacerse con un par de caracteres
ASCII, o con un carcter RTU, segn el modo de transmisin serial de la red.
Se usan dos tipos de chequeo de errores para las redes Modbus estndar. El
contenido del campo de chequeo de errores depende del modo de transmisin serial
que se est usando: ASCII o RTU. Si es ASCII se usa LRC y si es RTU se emplea
CRC.
4.5.1.2. TRANSACCIONES EN LAS REDES MODBUS
Los prticos Modbus estndar en los controladores Modicon usan una interfaz RS232C que, entre otras cosas, define los pines del conector, cableado, los niveles de
la seal, la velocidad de transmisin, y chequeo de paridad. Los controladores
pueden ser conectados directamente en red o va mdems.
Dr. Luis Corrales
ENERO 2008
Pg. 156
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Dos Modos de Transmisin Serial.
Los Controladores pueden configurarse para comunicarse en redes Modbus
estndar empleando uno de dos modos de transmisin: ASCII o RTU. Los usuarios
deben seleccionar el modo deseado, junto con los parmetros de comunicacin
serial (velocidad de transmisin, modo de paridad, etc), durante la configuracin de
cada controlador.
El modo y los parmetros seriales deben ser el mismo para todos los dispositivos en
una red Modbus. La seleccin del modo: ASCII o RTU slo pertenece a redes
Modbus estndar, y define los contenidos binarios de los campos del mensaje
transmitido serialmente en estas redes; es decir, determina cmo se empaquetar la
informacin en los campos del mensaje y como se decodificar.
Modo ASCII
Cuando se configuran los controladores para comunicarse en una red de Modbus
usando modo ASCII (Cdigo Estndar Americano para el Intercambio de
Informacin), cada byte de ocho-bits de un mensaje se enva como dos caracteres
ASCII.
1
SISTEMA DE CODIFICACION
Hexadecimal, ASCII caracteres 0... 9, A... F
- Un caracter hexadecimal es contenido en cada caracter ASCII del
mensaje
BITS POR BYTE
- 1 bit de inicio .
- 7 bits de los datos, el bit ms significativo se enva primero
- 1 bit para paridad par / impar, no bit para ninguna paridad
- 1 bit de parada si se usa paridad, 2 bits si no se usa paridad
CAMPO DE CHEQUEO DE ERRORES
- Chequeo de Redundancia Longitudinal (LRC)
Ventaja Principal: Permite intervalos de tiempo entre caracteres hasta de un
segundo antes de que ocurra un error por timeout.
TRAMA ASCII
En modo ASCII, los mensajes comienzan con un carcter ( : ) dos puntos (ASCII 3A
hex) y terminan con un par de caracteres (CRLF) Retorno de Carro + Avance de
Dr. Luis Corrales
ENERO 2008
Pg. 157
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Lnea) (ASCII 0D hex y 0A hex). Los caracteres a transmitir permitidos para todos los
dems campos son 0-A, A-F hexadecimal. Los dispositivos conectados en red
monitorizan el bus de red continuamente para detectar un carcter dos puntos.
Cuando se recibe, cada dispositivo decodifica el prximo campo (el campo de
direccin) para enterarse si es el dispositivo direccionado.
Pueden haber intervalos de hasta un segundo entre caracteres dentro del mensaje.
Si transcurre ms tiempo entre caracteres, el dispositivo receptor asume que ha
ocurrido un error.
Se muestra a continuacin una trama de mensaje tpica.
Excepcin: Con los controladores 584 y 984A/B/X, un mensaje ASCII puede
terminar normalmente despus del campo LRC sin enviar los caracteres CRLF.
En ese caso, debe tener lugar una pausa de al menos 1 segundo. Si esto sucede, el
controlador asumir que el mensaje ha terminado normalmente.
Modo de RTU
Cuando los controladores se configuran para comunicarse en una red Modbus en
modo RTU (Remote Terminal Unit), cada byte de ocho bits en un mensaje contiene
dos caracteres hexadecimales de cuatro bits. La ventaja principal de este modo es
que su gran densidad de caracteres permite un mejor rendimiento (throughput) que
el modo ASCII para la misma velocidad de transmisin. Cada mensaje debe
transmitirse en un flujo continuo.
Sistema de codificacin
-
Binario de ocho bits, hexadecimal 0... 9, A... F
Dos caracteres hexadecimal se contienen en cada campo de ocho bits del
mensaje
BITS POR BYTE
- 1 bit de inicio
- 8 bits de datos, el bit menos significativo se enva primero
- 1 bit de paridad par / impar, no bit para no paridad
- 1 bit de parada si se usa paridad, 2 bits si no se usa paridad
Dr. Luis Corrales
ENERO 2008
Pg. 158
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
El Campo de Chequeo de error
- Chequeo de Redundancia Cclico (CRC)
Ventaja Principal: Permite transmitir una densidad mayor de caracteres con la misma
taza de baudios que en el modo ASCII
TRAMA RTU
En modo RTU, los mensajes comienzan con un intervalo silencioso de al menos 3.5
tiempos de carcter. Esto es ms fcilmente implementado como un mltiplo de
tiempos de carcter a la velocidad de transmisin configurada en la red (mostrado
como T1-T2-T3-T4 en la figura de la trama). El primer campo transmitido es
entonces la direccin del dispositivo destinatario.
Los caracteres a transmitir permitidos para todos los campos son 0-A, A-F
hexadecimal. Los dispositivos conectados en red monitorizan el bus de red
continuamente incluso durante los intervalos silenciosos. Cuando el primer campo
(el campo de direccin) es recibido, cada dispositivo lo decodifica para enterarse si
es el dispositivo direccionado.
Siguiendo al ltimo carcter transmitido, un intervalo de al menos 3.5 tiempos de
carcter seala el final del mensaje. Un nuevo mensaje puede comenzar despus de
este intervalo.
La trama completa del mensaje debe ser transmitida como un flujo contnuo. Si un
intervalo silencioso de ms de 1.5 tiempos de carcter tiene lugar antes de
completar la trama, el dispositivo receptor desecha el mensaje incompleto y asume
que el prximo byte ser el campo de direccin de un nuevo mensaje.
De forma similar, si un nuevo mensaje comienza antes de que transcurran 3.5
tiempos de carcter despus de un mensaje previo, el dispositivo receptor lo
considerar una continuacin del mensaje previo. Esto dar lugar a un error, ya que
el valor en el campo final CRC no ser vlido para el mensaje combinado. Debajo se
muestra una trama de mensaje tpica.
Comparacin entre los dos modos:
En cualquiera de los dos modos de transmisin serial (ASCII o RTU), un mensaje
Modbus es empaquetado por el dispositivo que transmite en una trama que tiene un
comienzo y un final conocidos. Esto permite a los dispositivos receptores detectar el
comienzo de la trama, leer la direccin y determinar qu dispositivo est siendo
direccionado (o todos los dispositivos si es una difusin, direccin = 0) y conocer
Dr. Luis Corrales
ENERO 2008
Pg. 159
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
cundo se ha completado el mensaje. Se pueden detectar mensajes parciales y
generar mensajes de error como resultado.
Debe entenderse que en otras redes, como MAP y Modbus Plus, los mensajes
Modbus se ponen en tramas que no estn relacionadas con la transmisin serial.
Por ejemplo, una peticin de lectura de registros puede manejarse entre dos
controladores Modbus Plus sin tener en cuenta la configuracin de los prticos
Modbus seriales de cualquiera de los dos controladores.
4.5.1.3. Transacciones con otros tipos de Red
La Figura 4.28 muestra cmo podran interconectarse los dispositivos en una
jerarqua de redes que emplean tcnicas de comunicacin diferentes. La idea es que
la trama Modbus encapsulada en la estructura del paquete de cada red provee el
lenguaje comn por medio del cual los dispositivos pueden intercambiar mensajes.
Figura 4.28. Combinacin de Modbus en redes jerrquicas.
Dr. Luis Corrales
ENERO 2008
Pg. 160
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Dicho de otra forma, sobre otras redes los mensajes del protocolo Modbus se
integran dentro de la trama utilizada por esas redes. Por ejemplo, los controladores
de red Modicon para Modbus Plus o MAP, con software de aplicacin asociado
drivers y libreras - proporciona la conversin entre la trama del protocolo Modbus y
las tramas especficas de los protocolos que esas redes utilizan para comunicar sus
dispositivos nodo. De esta forma, algunos modelos de controladores Modicon
pueden comunicarse sobre Modbus Plus empleando puertos incorporados, o
adaptadores de red, y sobre MAP, usando adaptadores de red que hablen ese
protocolo.
En estas redes, los controladores se comunican usando la tcnica de par-a-par
(peer to peer ) en la que cualquier controlador puede comenzar las transacciones
con los otros controladores. As, un controlador puede operar como un esclavo o
como amo en transacciones separadas. Frecuentemente se proporcionan caminos
interiores mltiples para permitir transacciones concurrentes Maestro - Esclavo.
A nivel de mensaje, sin embargo, el protocolo Modbus aplica todava el principio
Maestro-Esclavo aunque el mtodo de comunicacin de red sea par-a-par. Si un
controlador origina un mensaje, lo hace como un dispositivo maestro y, por lo
mismo, espera una contestacin desde un dispositivo esclavo. Similarmente, cuando
un controlador recibe un mensaje construye una contestacin de esclavo y lo retorna
al controlador que origin la peticin.
4.5.2. MODBUS PLUS
Aplicaciones de Modbus Plus
Modbus Plus es un sistema de red de rea local diseado para aplicaciones de
mando industriales. Cada red soporta 64 dispositivos de nodo direccionables, a una
taza de transferencia de datos de 1 Mbps. Las aplicaciones incluyen supervisin de
mando de un proceso y los mensajes de supervisin.
Modbus Plus mantiene el protocolo de comunicacin par-a-par en los diferentes
niveles de la red. Modicon proporciona una variedad de controladores programables
y adaptadores de red. La red tambin permite mdulos de comunicacin I/O
distribuidos (DIO) en los que los controladores Modicon se comunican directamente
con los subsistemas I/O.
Cada controlador Modicon acepta que una red de computadoras se conecte
directamente a su puerto Modbus Plus. Agregando mdulos opcionales de red,
pueden configurarse redes adicionales para extender las comunicaciones de I/O en
la aplicacin del usuario.
El bs de la red usa un solo-cable o un cable dual. El diseo de cable dual aumenta
la proteccin contra las fallas del cable o el ruido que puede aparecer en cualquier
corrida del cable, permitiendo que ante la presencia de un problema la comunicacin
contine por el camino libre de errores.
Dr. Luis Corrales
ENERO 2008
Pg. 161
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
A 32 dispositivos nodo puede conectarse directamente el bus de red la cual puede
cubrir una longitud de 1500 pies (450 metros). Es posible emplear repetidores para
extender la distancia del cable a su mximo de 6000 pies (1800 metros), y el nmero
de nodos a su mximo de 64.
Comunicacin entre Redes
Es posible emplear un puente (bridge) para unir redes que estn jerrquicamente en
el mismo o diferente nivel. El puente permite el enrutamiento de los mensajes
originados en el nodo de una red a travs de uno o ms puentes a un nodo destino
en otra red. Esto optimiza el trfico en las redes pues solamente el trfico necesario
circular por cada red lo cual es til para aplicaciones crticas en cuanto al tiempo.
en que cada red emplea slo los dispositivos requerido por cronometrar del proceso
local. Solamente los mensajes que se requieren pasarn por los puentes para llegar
a otras redes.
Modbus y Modbus Plus pueden empelar Puentes Multiplexores. El Multiplexor del
Puente proporciona cuatro puertos seriales que se pueden configurar
separadamente para protocolo Modbus o como dispositivos RS232 / RS485.
Ejemplos de redes Modbus
La Figura 4.30 muestra un diagrama de bloques de cuatro redes Modbus Plus.
Las redes A y B organizan los niveles y estn unidas por un Puente. Las redes C y
D son redes distribuidas de dispositivos I/O (DIO) que se conectan a una red de
computadoras usando los mdulos opcionales de Red (NOMs). Cada DIO se
conecta a su red a travs de un adaptador DIO Modbus Plus.
Dr. Luis Corrales
ENERO 2008
Pg. 162
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.30. Redes unidas por un puente y mdulos I/O
Debe aclarase que nodo indentifica a cualquier dispositivo que se conecta
fsicamente al cable Modbus Plus. El trmino se aplica a cualquier dispositivo, sea
direccionable o no
La Figura 4.31 muestra una red con siete nodos. Algunos nodos, por ejemplo si se
trata de PLCs, tienen una direccin y pueden servir como fuente o destino de los
mensajes. La ventaja del Puente, que tiene una direccin, es que separa las
direcciones de los nodos direccionables en cada uno de las dos redes. El Repetidor
es un nodo que une dos secciones, no tiene ninguna direccin, y sirve para extender
la red.
Figura 4.31. Red extendida por un repetidor
Dr. Luis Corrales
ENERO 2008
Pg. 163
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Los segmentos se unen por medio de empalmes que son dispositivos pasivos que
mantienen al cable troncal como tal.
La Figura 4.32 muestra una aplicacin de los DIO con tres redes. Los nodos
mostrados incluyen al PLC, mdulos DIO, y adaptadores DIO.
Figura 4.32. Red con mdulos DIO y adaptadores DIO
En las redes del cable dual, dos segmentos de cable corren en paralelo entre dos
pares de nodos. Ellos deben tenderse por caminos separados dentro de la planta,
para proporcionar la fiabilidad mxima en caso de interferencia elctrica o dao
fsico al cable.
Topologa Lgica de la Red (capa de enlace de datos)
Los nodos de la red se identifican por direcciones asignadas por el usuario. La
direccin de cada nodo es independiente de su ubicacin fsica en la red. Las
direcciones estn dentro del rango de 1... 64 decimal, y no tienen que ser
secuenciales. No se permiten direcciones duplicadas.
Los nodos de la red funcionan como miembros un una un anillo lgico; esto es,
ganarn acceso a la red cuando el token les permita. Cada red tiene su propio token
rotando por la red, independientemente de las otras redes. Cuando se tiene redes
mltiples unidas por puentes, los token no pasan a travs de los puentes.
Cuando un nodo posee el token, puede empezara a transmitir un mensaje a otro
nodo. Cada mensaje contiene campos donde estn definidos la fuente y el destino.
Es posible tener mensajes tipo broadcast lo cual es til para la actualizacin rpida
de alarmas, setpoints, y otros datos. Cada red mantiene su propia base de datos
global, en donde se anota los nodos que pertenecen a dicha red.
La Figura 4.33 muestra el recorrido del token en dos redes unidas por un Puente.
Dr. Luis Corrales
ENERO 2008
Pg. 164
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.33. Rotacin del Token en dos redes unidas por un puente
Capa Fsica
El bus de la red consiste de un par trenzado con blindaje. Los dos datos en el cable
no son sensibles a la polaridad, sin embargo, es conveniente seguir una convencin
durante la instalacin elctrica para facilitar el mantenimiento. La red consiste de
secciones de cable, cualquier seccin puede tener hasta 32 nodos, con una
distancia de cable mxima de 1500 pies (450 m). las Secciones pueden ser unidas
por Repetidores para extender la longitud de la red hasta dar soporte a 64 nodos.
La longitud del cable mnima entre cualquier par de nodos debe ser por lo menos 10
pies (3 m). La longitud de cable mxima entre dos nodos es igual a la longitud de la
seccin mxima de 1500 pies (450 m).
En las redes de cable dual, los cables se identifican como el cable A y el cable B.
Cada cable puede tener hasta 1500 pies (450 m) de largo, La diferencia en la
longitud entre los cables A y B no debe exceder los 500 pies (150 m). Se conectan
los nodos al cable por medio de un dispositivo de empalme, proporcionado por
Modicon. Este mantiene la continuidad del cable troncal de la red, al mismo tiempo
que une el dispositivo del nodo. Un terminal facilita la conexin a tierra.
El empalme tambin contiene una resistencias terminales que debern conectarse
cuando sea el caso para prevenir las reflexiones. En la Figura 4.34 se muestra un
esquema del empalme.
Dr. Luis Corrales
ENERO 2008
Pg. 165
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.34. Diseo del empalme al cable
La Figura 4.35 ilustra un empalme en el que ilustra cuando se debe conectar los
jumpers internos para terminar adecuadamente los extremos del cable.
Figura 4.35. Topologa Fsica con jumpers
Figura 4.36. Topologa Fsica con Cables Duales
En la Figura 4.37 se muestra un ejemplo de una red Modbus Plus con un miltiplexor.
Dr. Luis Corrales
ENERO 2008
Pg. 166
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.37. Red Modbus Plus Multiplexada con multiplexor.
En la Figura 4.38 se muestra como se cablea entre un dispositivo de campo y el
adaptador de red de un PLC.
Figura 4.38. Cableado entre dispositivo ce campo y adaptador de red
A continuacin en la Figura 4.39 se muestra un ejemplo de una aplicacin real de
empleo del protocolo Modbus.
Dr. Luis Corrales
ENERO 2008
Pg. 167
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.39. Ejemplo de una aplicacin real con Modbus.
En el mundo industrial se tiende a considerar al Modbus como un protocolo que no
tiene muchas oportunidades de competir con Fieldbus o Profibus, los cuales tienen
organizaciones muy grandes de apoyo; sin embargo, Modbus es un estndar que ha
estado mucho tiempo en el mercado y su difusin ha sido muy extendida.
Dr. Luis Corrales
ENERO 2008
Pg. 168
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
4.5.3. FIELDBUS
Al igual que Modbus y Profibus, Fieldbus busca conectar las redes de campo y las
administrativo financieras de una forma jerrquica, tal como se ilustra en la Figura
4.40.
Figura 4.40. Red administrativa y redes de campo.
Se ha dicho que cada protocolo tiene sus caractersticas de funcionamiento propias.
Al unir redes con diferentes protocolos, como se muestra en la Figura 4.40 surgen
incompatibilidades. En muchos casos no se trata de protocolos que compitan entre
s, sino que funcionan bajo reglas diferentes y hay que procurar que se
complementen, particularmente en una arquitectura de comunicacin de varios
niveles tal como se muestra arriba.
FOUNDATION FIELDBUS
Este es el nombre que se da a la organizacin que da soporte a este protocolo para
lograr su difusin a nivel mundial. La red de bus de proceso Fieldbus es un sistema
de comunicacin de dos vas, serial, digital y multipuerto que conecta equipo de
campo, como sensores y actuadores inteligentes, con controladores, como PLCs.
Con Fieldbus no se trata simplemente de reemplazar las redes anlogas de corriente
de 4-20 mA por una red digital. Por medio de la comunicacin digital se permite
enviar no slo una seal de medicin o control, sino tambin anexar importante
informacin de diagnstico, que facilita el trabajo de mantenimiento y da mayor
seguridad al sistema, as como alarmas, parmetros de configuracin, etc. Adems,
siendo la comunicacin bi-direccional se facilitan las labores de configuracin y
calibracin.
Dr. Luis Corrales
ENERO 2008
Pg. 169
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
El protocolo est desarrollado a partir del modelo de comunicaciones OSI.
Es un protocolo para redes industriales pensado especficamente para aplicaciones
de control distribuido. Puede comunicar grandes volmenes de informacin, ideal
para aplicaciones con varios lazos complejos para control de procesos y
automatizacin de una fabrica. Provee bloques de funcin: IA, ID, OA, OD, PID, que
pueden intercambiarse entre la estacin maestra y los dispositivos de campo. La
longitud mxima por mensaje es de 256 bytes, lo que permite transferir funciones de
control con el concepto de objetos.
Figura 4.41. Protocolo Fieldbus y su comparacin con el modelo OSI
Fundamentalmente consta de tres niveles:
a) Capa fsica,
b) Capa o pila (Stack) de comunicaciones, y
c) Capa de usuario.
En este protocolo no se implementan los niveles 3, 4, 5 y 6 del modelo OSI, pues
estos no se requieren en aplicaciones de control de procesos, pero si se tiene en
cuenta dentro del stack de comunicaciones a la capa de aplicacin que tiene que
comunicarse con el Nivel de Usuario. La capa de usuario no pertenece al modelo
OSI y en el protocolo Fieldbus provee varias funciones clave como son: bloques de
funciones, servicios de descripcin de dispositivos y administracin del sistema.
CAPA FSICA
Trata de las caractersticas mecnicas, elctricas y funcionales para establecer y
liberar conexiones fsicas, responde a las normas ISA/IEC (ISA 550.02-1992/IEC
1158.2).
Dr. Luis Corrales
ENERO 2008
Pg. 170
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Poseen velocidades de 31,25 Kbps (H1, baja), 1 Mbps (H2, media) y 2,5 Mbps (H2,
alta) que depende del modo que se haya configurado: modo de corriente AC o modo
de voltaje DC.
Se emplea codificacin Manchester Bifsica L, llamada serial sincrnica pues la
seal del reloj se inserta en los datos, tal como se ilustra en la Figura 4.42.
Para la separacin de tramas se emplean: prembulo, limitador de inicio (Start
Delimeter) y limitador Final (End Delimiter) cuyo patrn se muestra a continuacin.
Figura 4.42. Codificacin y limitadores de trama en Fieldbus.
El pre-ambulo emplea el receptor para sincronizar su reloj interno con la seal
Fieldbus entrante. Cdigos especiales N+ y N- se hallan en el limitador de inicio y
final. Note que las seales N+ y N- no cambian de nivel en el medio de un bit.
Por otro lado, el receptor emplea el limitador de inicio para encontrar el comienzo de
una mensaje (trama) Fieldbus. Despus de que lo encuentra, el receptor acepta los
datos hasta que recibe el limitador final.
Fieldbus H1
El H1 fieldbus se puede usar para aplicaciones como control de temperatura, nivel y
flujo. Los dispositivos de campo pueden ser alimentados directamente desde
fieldbus y operar sobre cables 4-20 mA previamente instalados.
El H1 fieldbus puede tambin dar soporte a buses intrnsicamente seguros (I.S.) con
dispositivos alimentados desde el bus. Una barrera I.S. se coloca entre la fuente de
Dr. Luis Corrales
ENERO 2008
Pg. 171
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
alimentacin en el rea segura y los dispositivos I.S. en el rea peligrosa (Figura
4.43.
Figura 4.43. Dispositivo I.S. en una red Fieldbus.
Sealizacin Fieldbus H1
El dispositivo transmisor entrega 10 mA a 31.25 kbit/s sobre una carga terminal de
50 ohm para crear un voltaje de 1.0 voltios pico-a-pico modulada sobre la corriente
continua (DC) del voltaje de alimentacin.
El voltaje de alimentacin DC puede variar desde 9 a 32 VDC (Figura 4.44). Sin
embargo, para aplicaciones I.S. el voltaje de alimentacin permisible depende de los
valores de la barrera.
Figura 4.44. Sealizacin para Fieldbus H1.
Dr. Luis Corrales
ENERO 2008
Pg. 172
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Cableado en Fieldbus H1
El bus de H1 acepta derivaciones (stubs o spurs) como se muestran en la Figura
4.45. La longitud del cable est determinado por la taza de comunicacin, tipo de
cable, calibre del alambre, la opcin de alimentacin del bus y la opcin de la barrera
I.S.
Figura 4.45. Cable principal y derivaciones.
La corrida principal no puede exceder los 1900 m (6,232 ft) con par trenzado
blindado. La longitud del cable se determina sumando la longitud del bus y todas las
longitudes de las derivaciones. Como se muestra en la Figura 4.45 las terminaciones
se ubican en los dos extremos del cable principal. Su se puede decidir sobre la
longitud de una corrida o derivacin, mientras ms corta sea es mejor.
La longitud total de una derivacin est limitada por el nmero de derivaciones y el
nmero de dispositivos por derivacin. A continuacin se muestra un resumen de las
longitudes mximas permitidas de una derivacin como funcin del nmero de
dispositivos en el segmento.
Nmero de
Dispositivos
25-32
19-24
15-18
13-14
1-12
Mxima
longitud de la derivacin
1 m (3.28 ft)
30 m (98.42 ft)
60 m (196.8 ft)
90 m (295.2 ft)
120 m (393.6 ft)
Fieldbus H2
El Fieldbus H2 se usar tpicamente para procesos de control avanzados, entrada /
salida remota, y aplicaciones de automatizacin industriales de alta velocidad.
Aunque el estndar de la Capa Fsica permite que los dispositivos sean alimentados
desde el bus, en la mayora de las aplicaciones corriendo bajo H2 los dispositivos
sern auto-suficientes o alimentados desde un bus de alimentacin separado en el
cable fieldbus (es decir, un cable de 4-hilos).
Dr. Luis Corrales
ENERO 2008
Pg. 173
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Sealizacin en Modo de voltaje para H2
El dispositivo transmisor entrega 60 mA a 1.0 or 2.5 Mbit/s sobre una carga
equivalente de 75 ohmios para crear un voltaje pico-a-pico de 9 voltios en el fieldbus
(Figura 4.46).
Figura 4.46. Sealizacin para H2.
Sealizacin en Modo de Corriente H2
Fieldbus H2 da soporte a un modo de corriente especial, intrnsicamente seguro, con
opcin para alimentacin del dispositivo desde el bus. Para usar esta opcin, la
seal fieldbus es modulada en una seal de fuerza de 16 KHz AC (Figure 4.47).
Figura 4.47. Seal Fieldbus modulando la seal de fuerza.
Los dispositivos Fieldbus son conectados a la corrida principal empleando un
conector especial que emplea acoplamiento inductivo para captar la seal y la
alimentacin. EL conector especial no perfora el bus principal.
Cableado del Fieldbus H2 Fieldbus
La topologa del fieldbus H2 se muestra en la Figure 4.48. Debido a las frecuencias
altas de 1.0 Mbit/s a 2.5 Mbit/s, solamente se permite que haya el bus principal sin
derivaciones pues podran provocar reflexiones. El nmero total de dispositivos en
Fieldbus depende de factores como consume de potencia, tipo de cable, uso de
repetidores, etc.
La Figura 4.48 tambin ilustra como un puente puede conectar una red H1 a una red
H2.
Dr. Luis Corrales
ENERO 2008
Pg. 174
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.48. Puente conectado una red H1 con una red H2 en una red Fieldbus
La Tabla que sigue provee un ejemplo de opciones disponibles para la Capa Fsica.
Caractersticas
Tipo
Topologa
Alimentacin
Clasificacin
Nmero de
Dispositivos
Longitud Cable
31.25 kbit/s
Voltage
Bus/tree
none
2-32
1900 m
Taza de datos
31.25 kbit/s
Voltage
Bus/tree
DC
Intrinsicamente
Seguro
2-32
1900 m
31.25 kbits
Voltage
Bus/tree
DC
2-32
1900 m
Las topologas fsicas posibles para la instalacin se muestran ms abajo. Se
pueden inclusive utilizar combinadas, segn convenga para la aplicacin. Estas son:
Dr. Luis Corrales
ENERO 2008
Pg. 175
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Punto a punto
Con ramales
De rbol pata de gallo
Donde el bus de comunicaciones total puede resultar entonces:
Figura 4.49. Topologas fsicas en Fieldbus
Se muestra en las ilustraciones combinaciones arbitrarias en la cantidad de vlvulas
con relacin a la cantidad de transmisores. Obviamente es posible que un transmisor
controle ms de una vlvula. Tambin es posible que varios transmisores participen
en el control de una vlvula, caso de controles en cascada, proporcionalidad de
caudales para mezcla, control de nivel de tres elementos, etc.
La ilustracin mostrada constituye un sistema autnomo completamente operativo
en el cual los transmisores y las vlvulas se comunican a travs del bus para
mantener controlados los parmetros del proceso.
CARACTERSTICAS DE LOS EQUIPOS ENERGIZADOS EN REDES DE 31,25
Kbps
Voltaje de operacin: 9,0 a 32,0 V DC Mximo voltaje: 35 V.
Mxima tasa de cambio de corriente de reposo (no transmitiendo): este requisito no
es aplicable en los primeros 10 ms aprox. de la conexin del equipo a una red en
operacin. A los 10 ms aprox. despus de energizada la red la corriente debe ser de
1,0 mA.
Mxima corriente: este requisito se ajusta durante el intervalo de 10 a 100 ms
despus de conectar el equipo a una red en operacin. Corriente de reposo: 10 mA
Un equipo FIELDBUS que opere en una red de 31,25 kb/s ser capaz de operar
dentro del rango de voltaje de 9 V a 32 VDC entre los dos conductores incluyendo el
rizado. Un equipo podr ser sometido a mximo voltaje de 35 VDC sin causar daos.
Dr. Luis Corrales
ENERO 2008
Pg. 176
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Un equipo FIELDBUS que opere en los 31,25 kb/s sigue los requisitos de la norma
ISA-S50.02 cuando este energizado por una fuente con las siguientes
especificaciones:
a)
b)
c)
d)
La tensin de salida de la fuente de alimentacin para redes no I.S. no
sobrepasara los 32 VDC incluyendo el ripple.
La impedancia de salida de la fuente de alimentacin para redes no I.S.
ser 3 KW dentro de la frecuencia de 7,8 KHz a 39 KHz. Este requisito
no comprende los 10 ms de conexin al remover un instrumento de la
red.
La impedancia de salida de una fuente de alimentacin intrnsecamente
segura ser 400 KW dentro de la frecuencia de 7,8 KHz a 39 KHz.
Los requisitos de separacin de la seal y la distribucin de energa
con relacin a la tierra debe estar acorde con IEC 1131-2 (1993).
EL STACK DE COMUNICACIONES
Este provee los servicios de interfaces entre el nivel fsico y el nivel de usuario y
comprende fundamentalmente:
La Capa de Enlace de Datos (Data Link) es del tipo token-ring y establece la
vinculacin con el Nivel Fsico. Su funcin es la de controlar la transmisin
de mensajes hacia y desde el Nivel Fsico.
El acceso al bus se realiza mediante el protocolo LAS (link Active Scheduler)
que acta como un centralizador y arbitrador de uso del bus, permitiendo una
comunicacin determinista y realizando una distribucin de tiempo tal que
todo dispositivo conectado sea sensado. Adems, permite trasmisiones tipo
broadcasting.
La Capa de Aplicacin comprende la transferencia de datos desde el Nivel 2
al Nivel 7 y el tratamiento de los comandos que vienen desde el Nivel de
Usuario para direccionar y acceder por su nombre los dispositivos remotos.
LA CAPA DE ENLACE DE DATOS
A diferencia de otros sistemas de comunicacin, el Fieldbus no se maneja con la
relacin maestro/esclavo. Esta relacin exige que el maestro o patrn pregunte
para que el instrumento esclavo responda. El esclavo es incapaz de tomar
iniciativa dando como resultado que todas las imprescindibles intervenciones del
patrn consumen valioso tiempo del bus de comunicaciones.
La red Fieldbus permite dos formas para acceder a la red: cclica (scheduled) y
acclica (unscheduled).
a) Cclica: La trasmisin de mensajes ocurre a intervalos de tiempo regulares y
programados. Un Token da el derecho a un dispositivo de iniciar una transmisin.
Dr. Luis Corrales
ENERO 2008
Pg. 177
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
El LAS transmite el "Token" para que un equipo que necesita iniciar una
transmisin lo pueda hacer a intervalos regulares.
Figura 4.50. Transferencia de datos cclica (scheduled).
b)
Acclica: Se trasmiten entre los mensajes regulares. Un equipo solicita un
"Token" usando un cdigo en algunas de las respuestas enviadas a la red. El
LAS recibe esta solicitud y enva un "Token" para el equipo que lo solicito,
cuando halla tiempo disponible entre las trasmisiones peridicas. Tambin se
emplea cuando el dispositivo maestro enva un mensaje no programado a un
dispositivo esclavo. Los mensajes acclicos tpicos son seales de alarma o
comandos especiales para extraer informacin de disgnstico desde los
dispositivos de campo esclavos.
Figura 4.51. Transferencia de datos acclica (unscheduled).
Como ya se mencion, con Fieldbus se tiene un Link Active Scheduler (LAS) que
seala el inicio de cada ciclo de comunicaciones.
Dr. Luis Corrales
ENERO 2008
Pg. 178
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.52. Algoritmo del LAS.
Dentro de cada ciclo, cada uno de los instrumentos de campo, en forma secuencial,
publica la informacin que le corresponde, la cual es recogida por los otros
instrumentos que la necesiten. Dentro de cada ciclo se agrega un tiempo libre
durante el cual cualquier instrumento puede tomar la iniciativa de publicar
informacin adicional a la rutinaria de control, como sera el caso de alarmas por dar
un ejemplo.
De esta manera La velocidad H1 del bus de campo, 31.25 Kb/s, es suficiente para
atender los sistemas de control ms exigentes, sin ser tan alta que ocasione un
elevado consumo de energa. As el bus opera normalmente con una alimentacin
de 24 VDC.
CAPA DE USUARIO
Se encarga de definir una interfaz que permite que el usuario interacte con los
dispositivos de campo. Existen dos recursos importantes:
a) los bloques de funcin (FB),
b) los servicios de descripcin de dispositivos (DDS), y
c) el administrador del sistema (SM).
Bloque de Funcin. Los bloques de funciones son funciones de control
encapsuladas que permiten la ejecucin de las operaciones de entrada / salida tales
como ingresar o sacar datos anlogos, control PID, entrada / salida de datos
discretos, selectores de seal, etc. Se puede decir tambin que son objetos que
proveen acciones de control en base al comportamiento de las I/O del dispositivo.
Los bloques pueden residir dentro de los dispositivos de campo y estar disponibles
para otros, a travs de la red
La tabla siguiente rene algunas funciones usuales de control y de I/O.
Dr. Luis Corrales
ENERO 2008
Pg. 179
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Block de Funcin
Smbolo
Analog Input
Analog Ouput
Discrete Input
Discrete Ouput
Manual Loader
Proportional/Derivative
Proportional/Integral/Derivative
AI
AO
DI
DO
ML
PD
PID
Bloques de Recurso. Son los que permiten la descripcin de las caractersticas del
dispositivo tales como: nombre, fabricante, modelo y numero de serie. Este es un
recurso importante pues la descripcin de las funciones disponibles en el dispositivo,
permiten crear la HMI (Human Machine Interface), que le permita al usuario
configurar parmetros y realizar la calibracin, diagnstico y acceder a otras
funciones de servicio que se encuentran en los dispositivos de campo.
Bloque de Transferencia. Es la porcin de la administracin del sistema de la capa
de usuario que programa la ejecucin de los bloques de funciones a intervalos
precisos definidos. El usuario crea aplicaciones sobre el bus de campo, conectando
los bloques de funcin formando una estrategia de control distribuido, pudiendo
especificar en que tiempo y en que dispositivo se ejecutan. Por ejemplo las
funciones AI, PID y AO pueden residir en forma individual en un transmisor, en un
controlador de lazo abierto y en un actuador respectivamente. Ms an, la
administracin del sistema asigna automticamente las direcciones de los
dispositivos de campo.
El esquema siguiente muestra un control de lazo cerrado utilizando 3 bloques de
funcin, donde la entrada analgica corresponde a un transmisor de presin,
mientras que el algoritmo PID y la salida analgica corresponde a un posicionador
de una vlvula de control.
Dr. Luis Corrales
ENERO 2008
Pg. 180
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.44. Lazo de control de un proceso ejecutado en una red Fieldbus
Con esta posibilidad de interconectar diferentes funciones de control que residen en
diferentes dispositivos del bus de campo, el Fieldbus permite una verdadera
arquitectura de control distribuido.
RESUMEN CARACTERISTICAS FIELDBUS
Proveedor
Bus Abierto
Foundacin Fieldbus
S
Foundacion Fieldbus, TEXAS
Grupo de Usuarios
Estndares
IEC 1158-2
Topologa
2.5 Mbps 500m
Tasa de
transmisin
1Mbps 750m
31.75 Kbps 1900m
Requerimientos del
cableado
Par trenzado con blindaje
Estructura del
Paquete de datos
Synchrounous Manchester Coding
Interfaz elctrica
Energa y seales sobre la misma lnea
Dr. Luis Corrales
ENERO 2008
Pg. 181
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
4.5.2. PROFIBUS
La base de la especificacin del estndar PROFIBUS (PROcess Field BUS) fue un
proyecto de investigacin (1987-1990) llevado a cabo por los siguientes
participantes: ABB, AEG, Bosch, Honeywell, Moeller, Landis & Gyr, Phoenix Contact,
Rheinmetall, RMP, Sauter-cumulus, Schleicher, Siemens y cinco institutos alemanes
de investigacin. Hubo adems un pequeo apoyo por parte del gobierno alemn. El
resultado de este proyecto fue el primer borrador de la norma DIN 19245, el
estndar Profibus, partes 1 y 2. La parte 3, Profibus-DP, se defini en 1993.
Existen tres variantes principales de PROFIBUS de acuerdo a las caractersticas de
la aplicacin:
Automatizacin de
fbricas
Automatizacin para
propsitos generales
Automatizacin de
procesos
PROFIBUS DP
PROFIBUS FMS
PROFIBUS PA
(DIN 19245 T1 + T3)
(DIN 19245 T1 + T2)
(DIN 19245 T4)
pr EN 50170
pr EN 50170
en preparacin
Perfiles de aplicacin
especficos:
Tcnicas de transmisin
con seguridad intrnseca
de acuerdo a IEC 11582
Alta velocidad de
transferencia de data
para perifricos
descentralizados
Maquinas textiles
Automatizacin de edificios
Drivers, sensores y
actuadores, PLCs, Switch
gear debajo voltaje
TABLA 4.2. La familia PROFIBUS
En la Figura 4.45 se muestra como se conectan y relacionan estas redes de la
familia Profibus, mientras que en la Figura 4.46 se muestra la relacin que existe
entre los protocolos.
Dr. Luis Corrales
ENERO 2008
Pg. 182
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.45. Jerarqua de la Red Profibus
Figura 4.46. Arquitectura de los protocolos PROFIBUS.
PROFIBUS-FMS
Profibus FMS es la solucin universal para la comunicacin entre el nivel superior
(nivel de celda) y el nivel de campo de acuerdo a la jerarqua de comunicacin
industrial de Profibus (Figura 4.45). Para llevar a cabo tareas de comunicacin
extensivas con transferencia de datos en forma cclica o acclica a una velocidad de
transmisin mediana, el servicio FMS "Especificacin de Mensaje de Bus de campo
(Fieldbus Message Specification, por sus siglas en ingls)" ofrece una amplia gama
de funcionalidad y flexibilidad.
Dr. Luis Corrales
ENERO 2008
Pg. 183
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
El servicio FMS est definido como una subparte de las funciones MMS
(Manufacturing Message Specification "Especificaciones de Mensajes del
Fabricante", ISO 9506) del protocolo MAP, protocolo de automatizacin de
fabricacin (Manufacturing Automation Protocol).
El control a nivel de celda se da en reas (celdas) individuales que proveen de
control durante la produccin. Los controladores a este nivel deben comunicarse con
otros sistemas supervisores.
PROFIBUS FMS ha estado disponible como Normativa Nacional Alemana (German
National Standard) DIN 19245 desde 1990 y est incluida en la Norma de Buses de
Campo Europea (European Fieldbus Standard) parte EN 50170.
Profibus FMS emplea la Especificacin de Mensaje Fieldbus (Fieldbus Message
Specification) para ejecutar las tareas de comunicacin entre los niveles jerrquicos.
Esta comunicacin se realiza a travs de mensajes cclicos o acclicos a velocidades
de trasmisin medianas. En la Figura 4.47 se muestran las capas de este protocolo.
Figura 4.47. Protocolo Profibus - FMS
Configuracin PROFIBUS-FMS
Un sistema tpico de PROFIBUS-FMS est compuesto por varios equipos de
automatizacin inteligentes (Figura 4.48):
Dr. Luis Corrales
ENERO 2008
Pg. 184
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.48. Configuracin PROFIBUS-FMS
PROFIBUS-DP
Esta es la versin de desempeo optimizado de la red PROFIBUS, dedicado
especficamente a comunicaciones de tiempo crtico entre sistemas de
automatizacin y perifricos distribuidos. En la Figura 4.47 se muestran las capas de
este protocolo.
Figura 4.47. Protocolo Profibus - DP
Es apropiado como un reemplazo del costoso cableado paralelo de 24 Vdc y 4 a 20
mA utilizado en medicin de seales. PROFIBUS DP est basado en la parte 1 de la
norma DIN 19245 y ha sido mejorado con funciones de comunicacin efectivas para
el propsito requerido. Ha estado disponible como Normativa Alemana DIN 19245
parte 3 desde 1993. PROFIBUS DP est incluida en la Norma de Fieldbus Europea
(European Fieldbus Standard) parte EN 50170.
Dr. Luis Corrales
ENERO 2008
Pg. 185
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Tal como se puede ver, la red Profibus DP no define las capas 3 a 7. Omite la capa
7 principalmente para alcanzar la alta velocidad requerida por sus aplicaciones. El
mapeo de enlace datos directo (Direct Data Link Mapper, DDLM) localizado en la
capa dos provee el mapeo entre la interfaz del usuario y la capa 2 de la red ProfibusDP.
Configuracin PROFIBUS-DP
Maestro (Figura 4.48)
Un sistema tpico PROFIBUS-DP consiste en:
Un PLC o PC como sistema de control
Varios dispositivos E/S como:
E/S digitales o analgicas
Accionamientos AC o DC
Vlvulas magnticas o neumticas
Figura 4.48. Configuracin PROFIBUS DP.
Ambas variantes FMS y DP utilizan el mismo medio de acceso al medio (Capa 2) y
la misma tcnica de transmisin (Capa 1).
Dr. Luis Corrales
ENERO 2008
Pg. 186
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
PROFIBUS-PA
PROFIBUS PA es la versin de PROFIBUS utilizada en automatizacin de procesos.
PROFIBUS PA utiliza la tcnica de transmisin especificada en IEC 1158-2 y permite
seguridad intrnseca y estaciones alimentadas por el bus. PROFIBUS PA est
basado en los resultados del Proyecto de Sistemas Inter Operables (IPS- InterOperables System Project) el cual ha sido adoptado por la Organizacin de Usuarios
PROFIBUS. Los perfiles del dispositivo definen las funciones especificas del
dispositivo. El Lenguaje de Descripcin de Dispositivos (DDL - Device Description
Language) y los bloques de funcin permiten una completa interoperabilidad del
dispositivo.
Configuracin PROFIBUS-PA
Figura 4.49. Configuracin PROFIBUS - PA.
El protocolo es similar al de la red Profibus-FMS excepto que la capa 7 difiere
ligeramente. La capa 7 implementa el software de control de los bloques de
Dr. Luis Corrales
ENERO 2008
Pg. 187
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
funciones y tambin contiene un lenguaje descriptor de dispositivos que se emplea
para la identificacin y direccionamiento de los dispositivos de campo.
Figura 4.48. Protocolo Profibus-DP
La capa de enlace de datos de la red Profibus denominada Fieldbus Data Link Layer
(FDL) ejecuta todas las trasmisiones de mensajes y protocolo. Esta capa es
equivalente a la capa 2 del modelo OSI. La FDL tambin provee Control de Acceso
al Medio (MAC) e integridad de datos. El control de acceso al medio se asegura que
solo una estacin tiene el derecho para transmitir. Debido a que Profibus puede
comunicar entre los maestros con iguales derechos de acceso (por ejemplo, 2
PLCs), el control de acceso al medio se emplea para proveer a cada maestro la
oportunidad de ejecutar sus tareas de transmisin dentro de intervalos de tiempo
definidos precisos. Para la comunicacin entre un maestro y esclavo, se consigue
intercambio de datos en tiempo real, cclico tan pronto como sea posible en la red.
El protocolo de acceso al medio de Profibus es un mtodo de comunicacin hbrido
que incluye el protocolo token passing para comunicacin entre maestros y un
protocolo Maestro / Esclavo para comunicacin entre un maestro y los dispositivos
de campo esclavos.
Dr. Luis Corrales
ENERO 2008
Pg. 188
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Figura 4.49. Comunicacin Profibus Maestro-Maestro, Maestro-esclavo
La Figura 4.49 muestra una estructura PROFIBUS con cinco estaciones activas
(maestros) y cinco estaciones pasivas (esclavos). Los cinco dispositivos maestros
forman un anillo lgico y emplean el protocolo de paso de testigo (token passing).
Durante cierto tiempo, despus que una estacin activa recibe el token, este le
permite ejecutar las funciones de maestro en el bus. Se puede comunicar con todas
las estaciones esclavas en una relacin de comunicacin maestro-esclavo y con
todas las estaciones activas en una relacin de comunicacin maestro-maestro.
En la fase de arranque del sistema, la tarea del control de acceso al medio (MAC) de
la estacin activa es detectar su asignacin lgica y establecer el Token ring. En la
fase operativa, las estaciones en condicin de falla o apagadas deben ser
eliminadas del anillo y las nuevas estaciones debern ser incorporadas al mismo.
Dr. Luis Corrales
ENERO 2008
Pg. 189
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
RED: Exchange MASTER
ESCLAVO (DP master Class 1)
GREEN: Exchange MASTER
MASTER
BLUE:
Class 2)
Figura 4.50. Ejemplo de una red Profibus y el protocolo hbrido
Las caractersticas adicionales del control de acceso al medio de PROFIBUS son:
* Reconocer defectos en el medio de transmisin o en el transceiver.
* Detectar errores en el direccionamiento de las estaciones (ejemplo mltiples
usuarios).
* Detectar errores en el pase del token (ejemplo: mltiples tokens o prdida del
token).
Otra tarea importante de la capa 2 es la integridad de los datos. La Trama de la capa
2 de PROFIBUS asegura una alta integridad de los datos. Todas las Tramas tienen
una distancia de Hamming (Hamming distance) HD=4. Esto se logra usando unos
delimitadores especiales de inicio y finalizacin, sincronizacin libre de deslizamiento
(Slip-free syncronisation) y bit de paridad para cada octeto (ocho bits), de acuerdo a
lo definido por la norma IEC 870-5-1.
La capa 2 de PROFIBUS ofrece transmisin peer to peer y comunicacin multi-peer
(Broadcast y Multicast).
Comunicacin Broadcast significa que una estacin activa emite un mensaje sin
confirmacin a todas las otras estaciones (maestros y esclavos).
Comunicacin Multicast significa que una estacin activa enva un mensaje sin
confirmacin a un grupo de maestros o esclavos.
Un subset individual para el servicio de la capa 2 es utilizado en PROFIBUS FMS y
PROFIBUS DP. Todos los servicios de la capa 2 son llamados mediante puntos de
acceso de servicio (SAP, Service Access Point) desde las capas superiores.
En PROFIBUS FMS, estos SAPs son utilizados para el direccionamiento de las
relaciones lgicas de comunicacin. En PROFIBUS DP, las funciones definidas
precisamente, son asignadas a SAPs individuales. En las estaciones activas y
pasivas, se permiten simultneamente mltiples SAPs. Existe una distincin entre
los puntos de acceso de servicio de la fuente (SSAP) y el destino (DSAP).
Servicios de la capa de enlace de datos (2) PROFIBUS.
Servicio: SDA.
Funcin: Envo de data con reconocimiento.
Usado por: FMS.
Servicio: SRD.
Funcin: Envo y recepcin de data con repeticin.
Dr. Luis Corrales
ENERO 2008
Pg. 190
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Usado por: FMS y DP.
Servicio: SDN.
Funcin: Envo de data sin reconocimiento.
Usado por: FMS y DP.
Servicio: CSRD.
Funcin: Envo y recepcin cclico de data con repeticin.
Usado por: FMS.
Capa fsica (1) de PROFIBUS
El rea de aplicacin de un sistema de bus de campo es afectado sustancialmente
por la seleccin del medio fsico de transmisin y la interfaz al bus fsico. En adicin
Dr. Luis Corrales
ENERO 2008
Pg. 191
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
a los requerimientos para integridad de los datos, el costo de provisin e instalacin
del cableado es de un significado crtico. Por consiguiente, la norma PROFIBUS
define un protocolo nico de acceso al medio para diferentes tcnicas de
transmisin:
Qu componentes hay disponibles para PROFIBUS?
Cables para PROFIBUS
Alambre de cobre: Esta versin es definida como la versin bsica de la tcnica de
transmisin para aplicacin en fabricacin, construccin, automatizacin y control de
drivers de acuerdo a la normativa americana EIA RS-485. Esta usa un cable par
trenzado con blindaje opcional. Estn disponibles dos versiones de cables con
mximas distancias distintas.
Ahorro de tiempo mediante un rpido y fcil montaje de los conectores con
cables FastConnect
Para diferentes aplicaciones a travs de cables de bus especiales
Red insensible a interferencia mediante doble apantallado concepto de tierra
universal
Cable de bus para sistemas de bus segn IEC 61158- 2, p.e. PROFIBUS-PA
Distintas variantes para diferentes aplicaciones (Ex, No Ex)
Alta seguridad ante interferencias mediante un buen apantallamiento. PROFIBUS
PA.
Fcil estimacin de longitud mediante marcacin por metros
Dr. Luis Corrales
ENERO 2008
Pg. 192
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Cable de conexin PROFIBUS
Cable preconfeccionado para una rpida y barata conexin de participantes de
PROFIBUS a OLMs o a OBTs
Cable preconfeccionado para la conexin de participantes PROFIBUS (p.e. HMI)
a los equipos de automatizacin
Posibilidad de conexin a PC
Terminales de bus
Cable de conexin 830-1 T
Cable de conexin 830-2
Dr. Luis Corrales
ENERO 2008
Pg. 193
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Conector bus para PROFIBUS con (izda.) y sin (dcha.) interface PG.
Fibra ptica: PNO (Profibus User Organization/Organizacin de Usuarios de
PROFIBUS) est preparando la especificacin de una tcnica de transmisin por
fibra ptica de manera de ampliar la longitud del bus y lograr altas velocidades de
transmisin, y para ser usado en aplicaciones en ambientes con alta distorsin. Esta
aplicacin est disponible como una propuesta en el manual de PNO.
Tcnicas inalmbricas: Estn basadas en la radiacin infrarroja
Seguridad intrnseca: PROFIBUS PA permite la transmisin con seguridad
intrnseca y estaciones alimentadas a travs del bus. La tcnica de transmisin es
especificada en la norma internacional IEC 1158-2.T
Tcnicas de Transmisin para PROFIBUS-PA
Standard IEC 61158-2
La tcnica de transmisin responde al Standard IEC 61158-2 (idntico al
EN61158-2).
El medio de transmisin es par trenzado blindado. La seal es transmitida como
un flujo de datos sincronizados, con codificacin Manchester a 31.25Kbps. En
general, la lnea de datos es normalmente usada tambin como alimentacin de
los dispositivos de campo.
Ventajas:
Cableado simple con par trenzado.
Alimentacin remota a travs del centro de la seal.
Posibilidad de operacin intrnsicamente segura (para reas
peligrosas).
Topologas tipo bus y tipo rbol.
Dr. Luis Corrales
ENERO 2008
Pg. 194
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Sobre los 32 nodos por segmento de cable.
Restricciones:
Velocidad de transmisin restringida a 31.25Kbps.
Caractersticas de la Tcnica de Transmisin IEC 61158-2
Dr. Luis Corrales
ENERO 2008
Pg. 195
Dpto. Automatizacin y Control Industrial
Interfaces Comunicacin Industrial
Conclusiones
El protocolo de acceso al medio PROFIBUS incluye el mtodo de pase de
testigo (token passing) para comunicacin entre estaciones complejas
(maestras) y el mtodo maestro esclavo para comunicacin entre
estaciones complejas y dispositivos perifricos sencillos (esclavos). Este
mtodo combinado es llamado acceso hbrido al medio.
Con el mtodo hbrido de acceso al medio de PROFIBUS, es posible
implementar:
* Un sistema puro maestro-esclavo.
* Un sistema puro maestro-maestro (token passing).
* Un sistema con una combinacin de ambos mtodos.
La norma PROFIBUS define un protocolo nico de acceso al medio para
diferentes tcnicas de transmisin: Alambre de cobre (de acuerdo a la
normativa americana EIA RS-485), Fibra ptica (est disponible como una
propuesta en el manual de PNO), Tcnicas inalmbricas (basadas en la
radiacin infrarroja) y Seguridad intrnseca (PROFIBUS PA especificada en
la norma internacional IEC 1158-2.T)
PROFIBUS usa la misma tcnica de transmisin y el mismo protocolo de
acceso al bus con funciones de aplicacin diferenciadas. Esto permite una
reduccin significativa de esfuerzo en la instalacin, mantenimiento y
entrenamiento.
No solo trabaja con la especificidad de la instrumentacin y el control
automtico, sino que existe la necesidad de mantener histricamente
informacin de todos los procesos; adems, que esta informacin est
tambin en tiempo real y que sirva para la toma de decisiones y se pueda
as mejorar la calidad de los procesos.
Dr. Luis Corrales
ENERO 2003
Pg. 196
Das könnte Ihnen auch gefallen
- Ejercicios Programación ATMEGA16Dokument2 SeitenEjercicios Programación ATMEGA16Robert AguilarNoch keine Bewertungen
- IMPLEMENTACION DE UN ENLACE PUNTO A PUNTO CON NRF24L01Dokument4 SeitenIMPLEMENTACION DE UN ENLACE PUNTO A PUNTO CON NRF24L01Elmer David0% (1)
- Slots de expansión PCI, PCIe y PCMCIADokument7 SeitenSlots de expansión PCI, PCIe y PCMCIAVictor M Barraza GtzNoch keine Bewertungen
- Informe Filtro Pasa BandaDokument3 SeitenInforme Filtro Pasa BandaLauraCristinaMartinezCruzNoch keine Bewertungen
- ModbusDokument5 SeitenModbusParaNoch keine Bewertungen
- Práctica Nº3Dokument13 SeitenPráctica Nº3Jennifer KatherinNoch keine Bewertungen
- Accesorios DeviceNetDokument46 SeitenAccesorios DeviceNetAníbal LópezNoch keine Bewertungen
- Control PID para Un Motor DC Controlado Por ArmaduraDokument17 SeitenControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaNoch keine Bewertungen
- Topología ATM y sus característicasDokument20 SeitenTopología ATM y sus característicasJaneth GPNoch keine Bewertungen
- Comunicacion en Microcontroladores PICDokument12 SeitenComunicacion en Microcontroladores PICCarlos Jimenez ArellanoNoch keine Bewertungen
- SCRDokument5 SeitenSCRWiner Huarhua ChipaoNoch keine Bewertungen
- Atm Modo de Transferencia AsíncronaDokument3 SeitenAtm Modo de Transferencia Asíncronapapichulo_1Noch keine Bewertungen
- Full IP Multi TecnologíasDokument70 SeitenFull IP Multi TecnologíasDiego OrgoñNoch keine Bewertungen
- Cajero PIC18F4550Dokument19 SeitenCajero PIC18F4550Paula Andrea Velandia Gomez100% (1)
- Configuración red DeviceNet RSNetworxDokument23 SeitenConfiguración red DeviceNet RSNetworxHuguito CruzNoch keine Bewertungen
- 1.2. Manual - Machine - Learning - PythonDokument65 Seiten1.2. Manual - Machine - Learning - PythonConchi MarcosNoch keine Bewertungen
- Tarea 1 Infografía Comunicaciones en PLCDokument1 SeiteTarea 1 Infografía Comunicaciones en PLCJuan Pablo FernándezNoch keine Bewertungen
- Tabla de PirolisisDokument1 SeiteTabla de PirolisisCielo Florida0% (1)
- Lab 5 Multiplexores y DecodificadoresDokument2 SeitenLab 5 Multiplexores y DecodificadoresCarlos OrtegaNoch keine Bewertungen
- Informe9 ValdviezoD LombeidaD LabRI GR31Dokument8 SeitenInforme9 ValdviezoD LombeidaD LabRI GR31Diego ValdiviezoNoch keine Bewertungen
- Muestreador MatlabDokument5 SeitenMuestreador MatlabanngkaNoch keine Bewertungen
- PC at Pentium IvDokument18 SeitenPC at Pentium IvJesus HuamaniNoch keine Bewertungen
- Comunicación y Sincronización Entre Procesos en Sistemas MultiprocesadorDokument8 SeitenComunicación y Sincronización Entre Procesos en Sistemas MultiprocesadorÁngel VizcarraNoch keine Bewertungen
- Cajeros AutomáticosDokument2 SeitenCajeros AutomáticosDaniel AquinoNoch keine Bewertungen
- Convertidor AC-DC y conmutación forzada por tiristorDokument9 SeitenConvertidor AC-DC y conmutación forzada por tiristorArias D. CristianNoch keine Bewertungen
- Diagrama de Ojos Informe de LaboratorioDokument3 SeitenDiagrama de Ojos Informe de LaboratorioKarla BenthamNoch keine Bewertungen
- Formato de Datos y SeguridadDokument2 SeitenFormato de Datos y SeguridadVianell AlmazanNoch keine Bewertungen
- Instalar Proteus CloudDokument6 SeitenInstalar Proteus CloudJEFERSON MONTOYA DEL CASTILLONoch keine Bewertungen
- Arquitecturas RISC y CISC: Diferencias y EjemplosDokument2 SeitenArquitecturas RISC y CISC: Diferencias y Ejemplosmanuel_cruz_86Noch keine Bewertungen
- Modbus y Modbus PlusDokument17 SeitenModbus y Modbus PlusAlain JCNoch keine Bewertungen
- Oscilador y Detector de TonosDokument8 SeitenOscilador y Detector de TonosGuillermo HernandezNoch keine Bewertungen
- Sistema de Radio Control DiscretoDokument9 SeitenSistema de Radio Control DiscretoSebastián Sandoval100% (1)
- Voltimetro AmperimetroDokument3 SeitenVoltimetro AmperimetroEstuardo Salazar100% (1)
- Generadores de SeñalesDokument5 SeitenGeneradores de SeñalesErwinAlfonzo100% (1)
- Pic18f4550 2550Dokument557 SeitenPic18f4550 2550rosemberg_trujilloNoch keine Bewertungen
- Ex de Entrada Ctos 2 2021 IIDokument1 SeiteEx de Entrada Ctos 2 2021 IICanalDTodoUnPoco PCNoch keine Bewertungen
- CD4017: Contador y divisor hasta 10Dokument6 SeitenCD4017: Contador y divisor hasta 10Johannyr7Noch keine Bewertungen
- Historia Del PicDokument4 SeitenHistoria Del Picjuan freireNoch keine Bewertungen
- Proyecto TacometroDokument20 SeitenProyecto TacometroLuis Alfonso Prada LeonNoch keine Bewertungen
- Practicas Quest PDFDokument156 SeitenPracticas Quest PDFCarlos MartNoch keine Bewertungen
- Interfaz de Comunicación COMMGRDokument37 SeitenInterfaz de Comunicación COMMGRIvan SilvaNoch keine Bewertungen
- Transistores GtoDokument9 SeitenTransistores GtoNestor AnchatuñaNoch keine Bewertungen
- Realsec: Criptografía y Firma DigitalDokument24 SeitenRealsec: Criptografía y Firma DigitalRealsec Sistemas de cifrado y firma digital100% (2)
- Comandos Basicos ATMDokument3 SeitenComandos Basicos ATMBrandon MateusNoch keine Bewertungen
- Introduccion A Los Sistemas MicroprocesadosDokument49 SeitenIntroduccion A Los Sistemas MicroprocesadosFreddy Cantero ChicoNoch keine Bewertungen
- Programador ICSP dsPIC30F4013Dokument4 SeitenProgramador ICSP dsPIC30F4013Arturo LopezNoch keine Bewertungen
- Parcial 2 EDII - I2020 PDFDokument2 SeitenParcial 2 EDII - I2020 PDFBrayan Stip AvendañoNoch keine Bewertungen
- Informe Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Dokument22 SeitenInforme Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Victorino VillamizarNoch keine Bewertungen
- Codificacion ManchesterDokument18 SeitenCodificacion ManchesterAntonio PerezNoch keine Bewertungen
- Informe RS232Dokument15 SeitenInforme RS232avalenciagNoch keine Bewertungen
- KRDP U1 A3 MafmDokument4 SeitenKRDP U1 A3 MafmAraceli Martinez FernandezNoch keine Bewertungen
- 3 - Agregar IOS de Router y Switch A GNS3 PDFDokument11 Seiten3 - Agregar IOS de Router y Switch A GNS3 PDFDanny Garzón100% (1)
- Acceso Dispositivos 40Dokument9 SeitenAcceso Dispositivos 40Daniel De La CerdaNoch keine Bewertungen
- Direccionamiento y Enrutamiento IpDokument16 SeitenDireccionamiento y Enrutamiento IpMarixela De La Crux100% (1)
- GTO y SITHDokument9 SeitenGTO y SITHDanny Sixto Armijos Loyola0% (1)
- Encoder Hall sensores simplificadoDokument12 SeitenEncoder Hall sensores simplificadoMartin Daza GarciaNoch keine Bewertungen
- Banda TransportadoraDokument13 SeitenBanda TransportadoraAlejandro Fabian Torres CamachoNoch keine Bewertungen
- Redes de campo industrialesDokument68 SeitenRedes de campo industrialesMILTON XAVIER REMACHE SASIGNoch keine Bewertungen
- Pirámide de La AutomatizaciónDokument9 SeitenPirámide de La AutomatizaciónJuan JoseNoch keine Bewertungen
- Sistema Dcs Chancado PrimarioDokument4 SeitenSistema Dcs Chancado PrimarioAlex Franz Orosco QuintanaNoch keine Bewertungen
- Examen EntornoNaturalySocialDokument2 SeitenExamen EntornoNaturalySocialAlex GuamánNoch keine Bewertungen
- Manual de Sugerencias PedagógicasDokument20 SeitenManual de Sugerencias PedagógicasAlex GuamánNoch keine Bewertungen
- EDT (Proyecto Edificios Inteligentes)Dokument1 SeiteEDT (Proyecto Edificios Inteligentes)Alex Guamán100% (1)
- Manipulator 3DOFDokument3 SeitenManipulator 3DOFAlex GuamánNoch keine Bewertungen
- Prueba Social Es 1Dokument2 SeitenPrueba Social Es 1Alex GuamánNoch keine Bewertungen
- Modula ADC Spartan 3E Started BoardDokument4 SeitenModula ADC Spartan 3E Started BoardAlex GuamánNoch keine Bewertungen
- PruebaMatematica1 PDFDokument2 SeitenPruebaMatematica1 PDFAlex GuamánNoch keine Bewertungen
- Tesis Maestrias RobotinosDokument329 SeitenTesis Maestrias RobotinosAlex GuamánNoch keine Bewertungen
- Prueba Mate Matic A 1Dokument2 SeitenPrueba Mate Matic A 1Alex GuamánNoch keine Bewertungen
- EDT (Sistema de Monitoreo de Seguridad de Un Conjunto Rsidencial)Dokument1 SeiteEDT (Sistema de Monitoreo de Seguridad de Un Conjunto Rsidencial)Alex GuamánNoch keine Bewertungen
- Planta de Entrenamiento NIDokument3 SeitenPlanta de Entrenamiento NIAlex GuamánNoch keine Bewertungen
- Visit A TecnicaDokument7 SeitenVisit A TecnicaAlex GuamánNoch keine Bewertungen
- INFORME3 Control Del Motor DCDokument3 SeitenINFORME3 Control Del Motor DCAlex GuamánNoch keine Bewertungen
- Info Arrancador SuaveDokument6 SeitenInfo Arrancador SuaveAlex GuamánNoch keine Bewertungen
- Untitled 2Dokument32 SeitenUntitled 2Alex GuamánNoch keine Bewertungen
- Variadores de VelocidadDokument16 SeitenVariadores de VelocidadAlex GuamánNoch keine Bewertungen
- Parte 1 PDFDokument37 SeitenParte 1 PDFronnydppNoch keine Bewertungen
- Preparatorio 9Dokument15 SeitenPreparatorio 9Alex GuamánNoch keine Bewertungen
- Preparatorio2 (Motores PAP)Dokument6 SeitenPreparatorio2 (Motores PAP)Alex GuamánNoch keine Bewertungen
- Anexo 1 (Info4)Dokument1 SeiteAnexo 1 (Info4)Alex GuamánNoch keine Bewertungen
- Informe 3Dokument9 SeitenInforme 3Alex GuamánNoch keine Bewertungen
- Cu Adri PolosDokument16 SeitenCu Adri PolosAlex GuamánNoch keine Bewertungen
- Prepa 1Dokument4 SeitenPrepa 1Alex GuamánNoch keine Bewertungen
- Seguridad física sistemas informáticosDokument48 SeitenSeguridad física sistemas informáticosJavier SNoch keine Bewertungen
- Diagrama de Redes de Computadoras - Clases IPDokument20 SeitenDiagrama de Redes de Computadoras - Clases IPVirgi Merlos RodríguezNoch keine Bewertungen
- Xerox 6655Dokument264 SeitenXerox 6655jcastroalfarNoch keine Bewertungen
- Water CadDokument18 SeitenWater CadFrank Luque AlcarrazNoch keine Bewertungen
- Colegio Fiscal Cãsar Borja Lavayen MonografiaDokument35 SeitenColegio Fiscal Cãsar Borja Lavayen MonografiaGuevara JosueNoch keine Bewertungen
- CCNA 1 Capítulo 11 examen prácticaDokument5 SeitenCCNA 1 Capítulo 11 examen prácticajean.marquez2074Noch keine Bewertungen
- Proyecto Final VoIPDokument98 SeitenProyecto Final VoIPfoxtemplarioNoch keine Bewertungen
- Medios de transmisión, redes, topologías y protocolosDokument2 SeitenMedios de transmisión, redes, topologías y protocolosBrunoNoch keine Bewertungen
- IT Essentials Examen Final v5 RespuestasDokument14 SeitenIT Essentials Examen Final v5 RespuestasAníbal Moreno Poves60% (5)
- Cronogramas de Actividades A-2010 RedesDokument2 SeitenCronogramas de Actividades A-2010 RedesHazly Sorley Guerrero ContrerasNoch keine Bewertungen
- Teoria de Redes 2 (Ampliado)Dokument12 SeitenTeoria de Redes 2 (Ampliado)glasdu17Noch keine Bewertungen
- Análisis del uso del video marketing en redes sociales en El SalvadorDokument137 SeitenAnálisis del uso del video marketing en redes sociales en El SalvadorRodrigo RodriguezNoch keine Bewertungen
- Protocolos de Red PDFDokument27 SeitenProtocolos de Red PDFAldo Ariel AldoNoch keine Bewertungen
- Manual Transmisor GPRS LX20Dokument55 SeitenManual Transmisor GPRS LX20Juan Manuel RochNoch keine Bewertungen
- Nexpose Con MetaSploit - Seguridad en Sistemas y Técnicas de Hacking.Dokument10 SeitenNexpose Con MetaSploit - Seguridad en Sistemas y Técnicas de Hacking.Victor Manuel Doñe CeballosNoch keine Bewertungen
- Academia Alfa: Profesor AlfredoDokument24 SeitenAcademia Alfa: Profesor AlfredoLuis Edmundo Valle EstrellaNoch keine Bewertungen
- Derecho de La TelemáticaDokument20 SeitenDerecho de La TelemáticaSusan PA100% (1)
- Manual de Señalizacion Vial - 6Dokument14 SeitenManual de Señalizacion Vial - 6Alejandra Antezana Espada100% (1)
- Manual de Instalación Series 3000Dokument43 SeitenManual de Instalación Series 3000Timothy HolmesNoch keine Bewertungen
- Manual Atcom Ippbx Ip04Dokument16 SeitenManual Atcom Ippbx Ip04eddyx66Noch keine Bewertungen
- SINU-151 Unidad02 Material ReforzamientoDokument3 SeitenSINU-151 Unidad02 Material ReforzamientoKatherine GadeaaaNoch keine Bewertungen
- Informe Practica Ariel Jimenez AvilaDokument21 SeitenInforme Practica Ariel Jimenez AvilaAriel Jimenez100% (1)
- Informe de Practicas Pre Profesionales Roger Valle GibajaDokument57 SeitenInforme de Practicas Pre Profesionales Roger Valle GibajaRoger Dani Valle GibajaNoch keine Bewertungen
- Investigacion Forense en Redes SocialesDokument7 SeitenInvestigacion Forense en Redes SocialesAna Belén Arrocha MorenoNoch keine Bewertungen
- TesisDokument148 SeitenTesisFrancisco ChangoNoch keine Bewertungen
- Componentes de Una RedDokument2 SeitenComponentes de Una RedLuis Emilio Contreras MagañaNoch keine Bewertungen
- Unidad I - TeleprocesosDokument6 SeitenUnidad I - TeleprocesosVanessa La RosaNoch keine Bewertungen
- Volumen 2. Muestra InformaticaDokument20 SeitenVolumen 2. Muestra InformaticaFrancisco Antonio Amores ReyesNoch keine Bewertungen
- Manual de Periodismo de Datos Iberoamericano PDFDokument187 SeitenManual de Periodismo de Datos Iberoamericano PDFDario Torreggiani EstopiñánNoch keine Bewertungen
- Fallas y Diagnosticos de HPDokument60 SeitenFallas y Diagnosticos de HPAntonio Menéndez SalcedoNoch keine Bewertungen