Das könnte Ihnen auch gefallen
- Bateria Breve de Evaluacion NeuropsicologicaDokument19 SeitenBateria Breve de Evaluacion NeuropsicologicaSariah Ortiz67% (3)
- Dispositivos de potencia SCR, TRIAC y DIACDokument8 SeitenDispositivos de potencia SCR, TRIAC y DIACHolami Nombrees Jose AngelNoch keine Bewertungen
- Introduccion A MSP430Dokument72 SeitenIntroduccion A MSP430Agustin OrtizNoch keine Bewertungen
- Comunicacion Protocolo HartDokument7 SeitenComunicacion Protocolo HartElvis Medardo Cano LaymeNoch keine Bewertungen
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareVon EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareNoch keine Bewertungen
- MPA - Formulario para Evaluación de Manuales de Procesos Recientemente Implementados - MPA1Dokument2 SeitenMPA - Formulario para Evaluación de Manuales de Procesos Recientemente Implementados - MPA1camille3195100% (1)
- E.MAQUINAS-HERRAMIENTAS DE. TALLER. (TECNICO DE CARPINTERIA) Uniad 4. Pag. 21....... 54 2 PDFDokument34 SeitenE.MAQUINAS-HERRAMIENTAS DE. TALLER. (TECNICO DE CARPINTERIA) Uniad 4. Pag. 21....... 54 2 PDFJuan Leyton Perilla GarzónNoch keine Bewertungen
- Silabo Modeleria y Fundicion 2021.2.1Dokument8 SeitenSilabo Modeleria y Fundicion 2021.2.1Lobixto Vasquez CanalesNoch keine Bewertungen
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Von EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Bewertung: 3 von 5 Sternen3/5 (1)
- ElectroductosDokument11 SeitenElectroductosJoss ReyesNoch keine Bewertungen
- Jornada Robótica IndustrialDokument82 SeitenJornada Robótica IndustrialJavier MartínezNoch keine Bewertungen
- Normas Uso ResidencialDokument6 SeitenNormas Uso ResidencialJUANNoch keine Bewertungen
- TEMARIO ESP32CAM NIVEL AVANZADO - 24 HorasDokument4 SeitenTEMARIO ESP32CAM NIVEL AVANZADO - 24 HorasRicardo YauriNoch keine Bewertungen
- ImpactoRobóticaIndustriaUTPDokument22 SeitenImpactoRobóticaIndustriaUTPCristhiam De LeónNoch keine Bewertungen
- Programacion de RobotsDokument43 SeitenProgramacion de RobotsOMEGA LUL KAPPANoch keine Bewertungen
- Simuladores de Robots - Jhannifer FDokument10 SeitenSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Implementación PID ArduinoDokument16 SeitenImplementación PID ArduinoDavids MallahuariNoch keine Bewertungen
- Crear Programa en Lenguaje Estructurado ST Con Cx-Programmer - InfoPLCDokument8 SeitenCrear Programa en Lenguaje Estructurado ST Con Cx-Programmer - InfoPLCPedro BortotNoch keine Bewertungen
- Trabajo Practico Nº1 de Computadoras de Las AeronavesDokument25 SeitenTrabajo Practico Nº1 de Computadoras de Las AeronavesLautaro PintoNoch keine Bewertungen
- Circuitos SecuencialesDokument32 SeitenCircuitos SecuencialesCristobal SanchezNoch keine Bewertungen
- Clase 20. Arduino SimulinkDokument9 SeitenClase 20. Arduino SimulinkYayitaLeonaB.VanegasNoch keine Bewertungen
- 2017 09 Es PG FA SmallDokument284 Seiten2017 09 Es PG FA SmallRoberto Abal CurrásNoch keine Bewertungen
- Automatizacion IndustrialDokument12 SeitenAutomatizacion IndustrialBrando RojasNoch keine Bewertungen
- Sew Mdx61b EncoderDokument72 SeitenSew Mdx61b EncoderEva SuárezNoch keine Bewertungen
- Adquisición de Datos Con PythonDokument2 SeitenAdquisición de Datos Con PythonStuardo SagastumeNoch keine Bewertungen
- RecomendacionesDokument18 SeitenRecomendacionesCarlos PilatasigNoch keine Bewertungen
- Introduccion A La RoboticaDokument101 SeitenIntroduccion A La RoboticaSEBASTIAN HUMBERTO RIVAS CIFUENTES100% (1)
- Introducción A NI MultisimDokument17 SeitenIntroducción A NI MultisimDemian Cashh MnheyNoch keine Bewertungen
- GFPI-F-019 - Guia - Ap - 290201037 - EJECUCIÓN - ARDUINODokument17 SeitenGFPI-F-019 - Guia - Ap - 290201037 - EJECUCIÓN - ARDUINOFabio Arce E100% (1)
- Control DinamicoDokument11 SeitenControl DinamicoÁngeles Campaña Olmos100% (1)
- Caracteristicas PC Industrial SimaticDokument30 SeitenCaracteristicas PC Industrial SimaticAlberto Lopez SanchezNoch keine Bewertungen
- Grupo 299020 12Dokument44 SeitenGrupo 299020 12Josep Alexander Gutierrez Reyes100% (1)
- Robot Seguidor de LineaDokument4 SeitenRobot Seguidor de Lineacheco66666Noch keine Bewertungen
- Syllabus Microprocesadores y Microcontroladores V2Dokument11 SeitenSyllabus Microprocesadores y Microcontroladores V2ErikaB.GarciaNoch keine Bewertungen
- Proyecto FinalDokument9 SeitenProyecto FinalManuel RufastoNoch keine Bewertungen
- ManualDokument83 SeitenManualCristina Miguélez100% (1)
- infoPLC Net 53874e7438b38 PALETIZADO PDFDokument169 SeiteninfoPLC Net 53874e7438b38 PALETIZADO PDFDiego Alejandro Gallardo IbarraNoch keine Bewertungen
- Emulador PLC Allen Bradley PDFDokument11 SeitenEmulador PLC Allen Bradley PDFtanathos18Noch keine Bewertungen
- Redes IndustrialesDokument20 SeitenRedes IndustrialesmarielaNoch keine Bewertungen
- Circuitos Contadores PDFDokument6 SeitenCircuitos Contadores PDFmars1972100% (1)
- Comunicación Serial - Conceptos Generales - National Instruments PDFDokument4 SeitenComunicación Serial - Conceptos Generales - National Instruments PDFStefy AlanizNoch keine Bewertungen
- 1.5 AplicacionesDokument19 Seiten1.5 AplicacionesErick Perez PalaciosNoch keine Bewertungen
- Modelo Von NeumannDokument10 SeitenModelo Von NeumannUsiel RTNoch keine Bewertungen
- Ma KR Quantec Extra EsDokument137 SeitenMa KR Quantec Extra EsCarlos AvilésNoch keine Bewertungen
- Implementacion de Sistema Io-LinkDokument91 SeitenImplementacion de Sistema Io-LinkAlexis Montero OlivoNoch keine Bewertungen
- UP6 MaintenanceDokument32 SeitenUP6 MaintenanceEmilio AlNoch keine Bewertungen
- Tema 2 - Morfología Del RobotDokument44 SeitenTema 2 - Morfología Del RobotDulce VelizNoch keine Bewertungen
- Investigación: Robótica Como Herramienta de AprendizajeDokument46 SeitenInvestigación: Robótica Como Herramienta de AprendizajeAngel Sergio Perez CastilloNoch keine Bewertungen
- FotodiodoDokument8 SeitenFotodiodoJohan GRNoch keine Bewertungen
- E5P-GET-PUT 1200 300 v1Dokument7 SeitenE5P-GET-PUT 1200 300 v1Jose Antonio Fernandez MadueñoNoch keine Bewertungen
- Laboratorio de Electronica BasicaDokument5 SeitenLaboratorio de Electronica BasicaPatricia Eveline100% (1)
- Trabajo de Investigacion FormativaDokument8 SeitenTrabajo de Investigacion FormativaYuri Saul Sivincha QuispeNoch keine Bewertungen
- SeguridadDokument2 SeitenSeguridadJose Antonio MercadoNoch keine Bewertungen
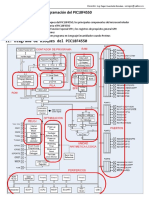
- P01 Modelo de Programación Del PIC18F4550Dokument14 SeitenP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- Morfología Del RobotDokument18 SeitenMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Robótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?Von EverandRobótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?Noch keine Bewertungen
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadVon EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadNoch keine Bewertungen
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloVon EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloNoch keine Bewertungen
- Televisión digital y telecomunicaciones en comunidades de propietariosVon EverandTelevisión digital y telecomunicaciones en comunidades de propietariosNoch keine Bewertungen
- Robótica: De la ciencia ficción a la realidad científicaVon EverandRobótica: De la ciencia ficción a la realidad científicaNoch keine Bewertungen
- Batería De Magnesio: Avance para reemplazar el litio en las bateríasVon EverandBatería De Magnesio: Avance para reemplazar el litio en las bateríasNoch keine Bewertungen
- Rectona Óptica: Generación de energía a partir del calorVon EverandRectona Óptica: Generación de energía a partir del calorNoch keine Bewertungen
- Anexos 1 Al 4 CS2019Dokument12 SeitenAnexos 1 Al 4 CS2019camille3195Noch keine Bewertungen
- Propuesta - Ambar Calvo - Mi Espacio Tu EspacioDokument22 SeitenPropuesta - Ambar Calvo - Mi Espacio Tu Espaciocamille3195Noch keine Bewertungen
- Taller para La Formulación de Proyectos de InnovaciónDokument5 SeitenTaller para La Formulación de Proyectos de Innovacióncamille3195Noch keine Bewertungen
- Ejemplo ProcedimientoDokument3 SeitenEjemplo ProcedimientoLamar Al MbNoch keine Bewertungen
- B-SP-Guia Practica - Sistema de Gestion SostenibilidadDokument28 SeitenB-SP-Guia Practica - Sistema de Gestion Sostenibilidadcamille3195Noch keine Bewertungen
- Copia de Technology TrendDokument16 SeitenCopia de Technology Trendcamille3195Noch keine Bewertungen
- Estudio de Mercado de La Produccion y Uso Del BananoDokument2 SeitenEstudio de Mercado de La Produccion y Uso Del Bananocamille3195Noch keine Bewertungen
- Iso 10013 2002 Directrices Documentacion SGCDokument1 SeiteIso 10013 2002 Directrices Documentacion SGCcamille3195Noch keine Bewertungen
- Guia de Negocios Ejemplo Costa RicaDokument21 SeitenGuia de Negocios Ejemplo Costa Ricacamille3195Noch keine Bewertungen
- ProcesoProducciónDokument94 SeitenProcesoProducciónPamela GarrónNoch keine Bewertungen
- Cohete de AguaDokument7 SeitenCohete de Aguacamille3195Noch keine Bewertungen
- Guia de Negocios Ejemplo ColombiaDokument48 SeitenGuia de Negocios Ejemplo Colombiacamille3195Noch keine Bewertungen
- Fuerza Sobre Superficie PlanaDokument11 SeitenFuerza Sobre Superficie Planacamille3195Noch keine Bewertungen
- Peligros y medidas de controlDokument83 SeitenPeligros y medidas de controlDeiby Ojeda100% (1)
- Hoja de Campo (LCE)Dokument28 SeitenHoja de Campo (LCE)Jesus SantiagoNoch keine Bewertungen
- Corte ventana tubería VBR-22A producir gas SaraDokument9 SeitenCorte ventana tubería VBR-22A producir gas Saraalexpat_123Noch keine Bewertungen
- PROGRA Elva Eventos Espec.I. 2015Dokument14 SeitenPROGRA Elva Eventos Espec.I. 2015jav1erqNoch keine Bewertungen
- Maquinaria y Herramientas de La ConstrucciónDokument30 SeitenMaquinaria y Herramientas de La ConstrucciónORIANANoch keine Bewertungen
- Medios técnicos y herramientas de mediciónDokument8 SeitenMedios técnicos y herramientas de mediciónAntoo ParadaNoch keine Bewertungen
- Perforacion A Diamantina DDH CaracolloDokument15 SeitenPerforacion A Diamantina DDH CaracolloEdwin VelasquezNoch keine Bewertungen
- Manual de Operacion y Mantenimiento FinalDokument37 SeitenManual de Operacion y Mantenimiento FinalKatherine Revatta0% (1)
- Electronic Batch RecordDokument1 SeiteElectronic Batch RecordLady Johana Suárez EsquinasNoch keine Bewertungen
- TECNOLOGIADokument5 SeitenTECNOLOGIAROMINA ESTER ORTIZ GAJARDONoch keine Bewertungen
- Marco Teórico AntropometriaDokument4 SeitenMarco Teórico Antropometriajhonathan LeivaNoch keine Bewertungen
- Instructivo Tarjeta Roja1Dokument4 SeitenInstructivo Tarjeta Roja1SARRIA NELSONNoch keine Bewertungen
- 58A - 4134.19 DC - Montador de Instalaciones de Gas DomiciliarioDokument54 Seiten58A - 4134.19 DC - Montador de Instalaciones de Gas DomiciliarioDainotta Hernán Mantenimiento IndustrialNoch keine Bewertungen
- Identificación de Herramientas EléctricasDokument10 SeitenIdentificación de Herramientas EléctricasEduardoNoch keine Bewertungen
- Reglamento Del Laboratorio de Electricidad.Dokument15 SeitenReglamento Del Laboratorio de Electricidad.Santiago Oleas EscalanteNoch keine Bewertungen
- Ut 03 Reparación Elementos Metálicos Con AccesoDokument4 SeitenUt 03 Reparación Elementos Metálicos Con AccesoEduardo Marrero QuintanaNoch keine Bewertungen
- Casa para MascotasDokument3 SeitenCasa para MascotascddgNoch keine Bewertungen
- Especificaciones Formato 7Dokument19 SeitenEspecificaciones Formato 7depepito666Noch keine Bewertungen
- Inspeccion de HerramientasDokument2 SeitenInspeccion de HerramientasKaren MarjorieNoch keine Bewertungen
- Identificacion de Peligros...Dokument28 SeitenIdentificacion de Peligros...AlexSarmientoNoch keine Bewertungen
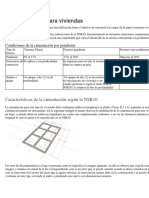
- 7 Cimentaciones para ViviendasDokument32 Seiten7 Cimentaciones para ViviendasKEWIN ANDERSON ENRIQUEZ AYUQUENoch keine Bewertungen
- Informatica CUARTO 2024Dokument9 SeitenInformatica CUARTO 2024diana2016565Noch keine Bewertungen
- Especificaciones Tecnicas Arquitectura RequeDokument306 SeitenEspecificaciones Tecnicas Arquitectura RequeAlex Soto CarbajalNoch keine Bewertungen
- Varios Check ListDokument27 SeitenVarios Check ListAbril Guzmán Farelu100% (1)
- 3501sp FlenderDokument34 Seiten3501sp FlenderOscar CruzNoch keine Bewertungen
- Fabricación piezas limadoraDokument7 SeitenFabricación piezas limadoraMauricio UribeNoch keine Bewertungen
- Procedimiento Inspeccion Visual CondensadorDokument7 SeitenProcedimiento Inspeccion Visual CondensadorJaviTron74Noch keine Bewertungen